
0 前言
随着企业生产自动化程度逐步提高,能够极大提高生产效率,解放生产力的码垛机器人应用越来越广泛,与之配套的码垛机器人末端抓取装置也发展迅速,形成了多种类型[1]。但是现有抓取装置多为刚性抓取式手爪,易损坏抓取物,且夹取位置受限,只能多面夹取侧面或底面,这样在被抓取物为不规则箱体时,则抓取困难,通用性差[2]。同时,放置被抓取物的码垛托盘多由人工摆放,或采用专用装置自动放置,提高了生产成本,降低了转运码垛效率。基于上述情况,笔者设计了一种真空吸盘式多功能抓取装置,不仅能抓取箱类、袋类包装(包装材质致密不透气)、板材及桶类包装,还可通过不更换抓取装置实现自动码放托盘,可以满足现代企业生产的高效通用性需求。
1 技术参数与方案设计
常见的产品包装形式主要有箱类包装、袋类包装以及桶类包装[3],笔者根据市场流通的常见包装物情况,列出所设计多功能抓取装置需适用的包装物规格如表1所示。
越秀上街卖鸡蛋,老远,就有人朝她吐口水:“你看,那就是卖国贼的老婆,她还有脸出来,要是我,早投河了。”
由于需码放的包装物品种多样,单靠夹持或抓取方式无法满足使用需求,且刚性接触易损坏包装物,因此所设计的多功能抓取装置采用真空吸盘来吸取码放包装物。真空吸盘一般是由橡胶材料等软性材料所制造,吸取或者放下不会对包装物造成任何损伤[4]。此外不管被吸物体是什么材料做的,只要能密封,不漏气,表面致密光滑,结构牢固可靠,均能使用,通用性很强,能够满足箱类、袋类、桶类以及板材的码放需求[5]。真空吸盘所需的真空一般有以下两种方式产生:一是由电动机、真空泵以及各种真空器件所组成的真空系统来提供,这需要一套独立的真空设备,成本较高;二是由压缩空气通过真空发生器所产生的二次真空来提供,经济方便[6]。考虑到一般自动化生产场所大都具有压缩空气,或在不具有压缩空气的情况下投资建立一套压缩空气发生装置的成本较建立一套真空设备的成本更低,因此采取第2种方式产生真空,这只需要在多功能抓取装置上配置一套由压缩空气发生真空的装置。
文学作为一种审美意识形态一直是人类文化与人类精神中极其重要的组成部分,它总是在字里行间渗透人类最美好的思想情感,以丰富的诗意与情意对人的心灵进行潜移默化的陶冶,对人类精神领域进行净化、升华和拓展。任何一个民族最优秀的文化都是依托文学的形式得以传承下来的,要真正吸收民族文化的智慧,自然离不开文学阅读。文学经典是民族与世界、古代与现代思想文化的宝库,构建学校学习文化,其内容和形式很多,但让教师和学生阅读文学经典是不可或缺的一项。
表1 包装物规格
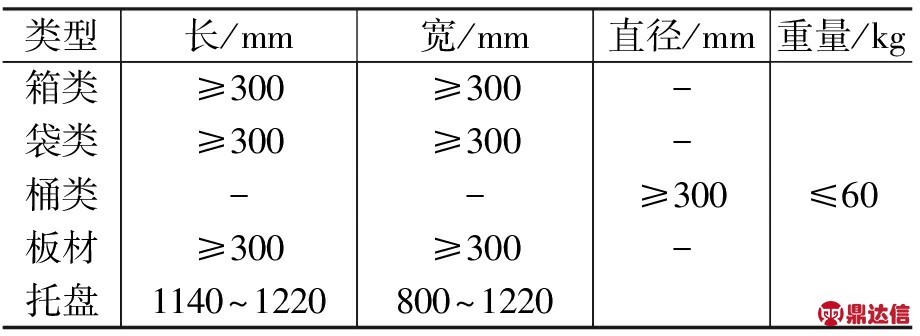
类型长/mm宽/mm直径/mm重量/kg箱类袋类桶类板材托盘≥300≥300-≥3001140~1220≥300≥300-≥300800~1220--≥300-≤60
对于托盘的码放,我们可以利用托盘上的叉孔,通过勾爪插入托盘叉孔后的抓放动作来实现码放托盘。但是,由于托盘尺寸相比于需码放的包装物来说一般较大,为了适应托盘尺寸,可将真空吸盘分区阵列,可一次性吸取多件包装物。
问:《养生三记》作者,我来向你求教:我妈妈今年64岁,十几年前做了一次子宫肌瘤切除手术,在手术输血过程中出现短暂的血液过敏反应,之后就患上了皮肤病。目前,其他地方都好了,就是双腿小腿上仍断断断续续地发病。伴随年龄的增长,她的睡眠也不好了,一天仅睡两三个小时。三年前检查发现她有双肾结石,并有肾囊肿,每个秋天要发病一次。20天前我去看她,发现她的尿颜色不对,呈现砖红色,并且混浊。她自己也说走一点路就觉得很累,并“尿血”。我心里很着急,快帮我看看,妈妈这是怎么了?
多功能抓取装置作为码垛机器人的末端执行件,是自动化码垛系统的一部分。自动化码垛系统能够通过光电传感器或视觉识别系统自动识别需码垛物料的类型[7],并从控制器中调用相应程序驱动码垛机器人及末端执行件对箱类包装、袋类包装以及桶类包装采取相应动作。
综合上述分析,提出了一种综合真空吸盘以及托盘勾爪抓取方案的多功能抓取装置,此真空吸盘式多功能抓取装置能够满足不更换末端执行件即可实现不同类型包装物以及托盘的码放需求。
2 结构组成及工作原理
在上述方案分析与设计的基础上,对真空吸盘式多功能抓取装置进行了详细的结构设计,并采用Solidworks三维软件建立了图1所示的真空吸盘式多功能抓取装置三维模型。
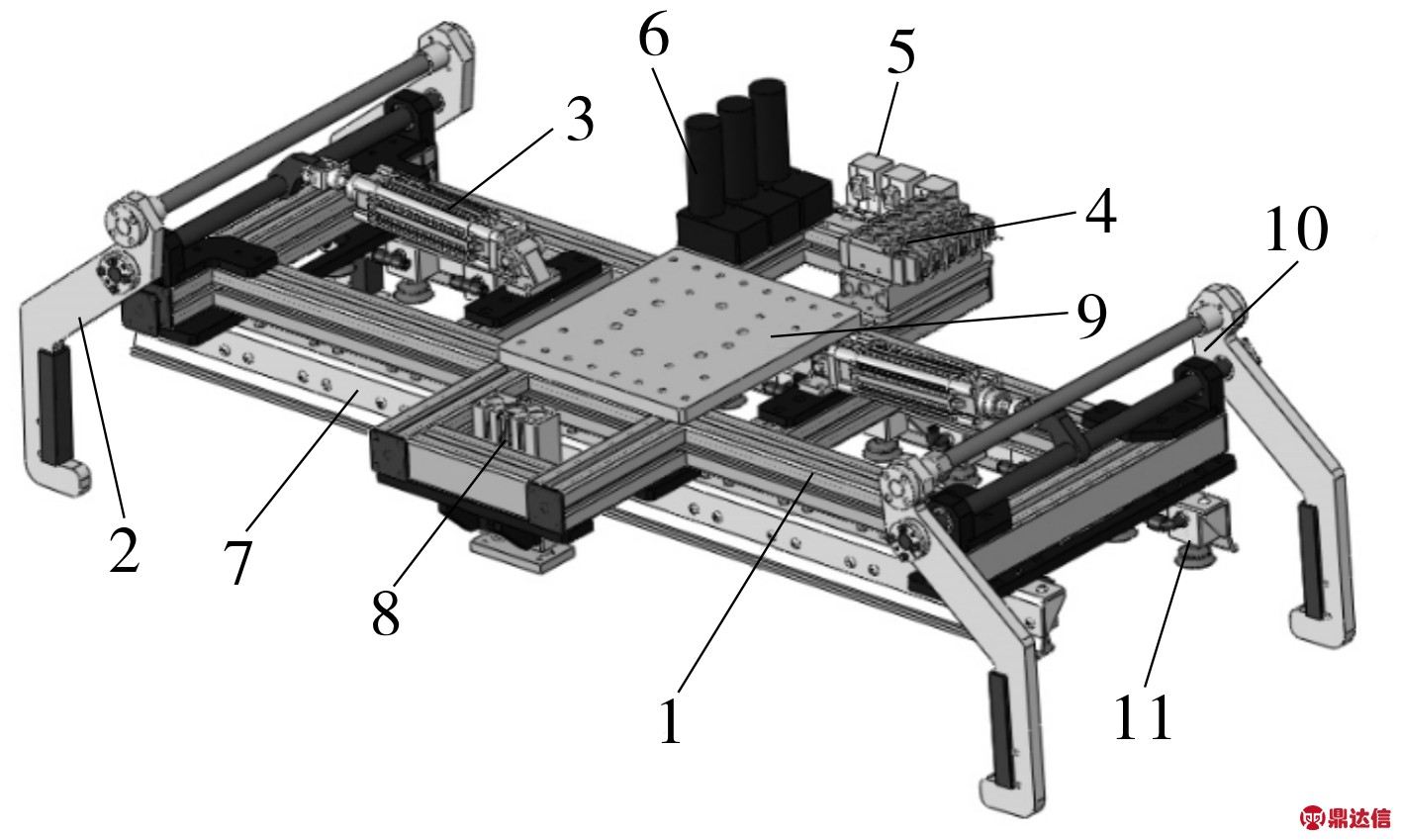
图1 真空吸盘式多功能抓取装置三维模型
1-安装框架 2-托盘勾爪 3-托盘夹取动作气缸 4-电磁阀组 5-压力开关 6-真空发生器 7-真空吸盘组件 8-位置检测气缸 9-连接法兰 10-托盘勾爪组件 11-真空吸盘组件
结合真空吸盘式多功能抓取装置的三维结构图对其结构组成及工作原理进行详细说明。
从技术组成角度而言,组学分析技术包括转录组学分析技术和蛋白组学分析技术。在实际应用中,运用转录组学分析技术手段,能够实现基因片段的检测,获得其在转基因生物体中的转录表达情况。转录组学分析技术常应用于转基因生物体分析检测中,为非期望效应分析评价提供了技术保障。利用蛋白组学分析技术手段,能够掌握生物在一段时间内和某些环境条件下蛋白质的表达情况,适用于定性检测分析或者定量检测分析。除此之外,蛋白组学分析技术还能够分析生物体生理状态下的所有蛋白以及病理状态下的所有蛋白,进而掌握生物体所具有的生命活动特征。
2.1 结构组成
该真空吸盘式多功能抓取装置主要由主体框架、真空系统及其附件、托盘夹取系统及其附件等组成。
7月10日,宝马集团与长城汽车签署了合资协议,在中国成立光束汽车,生产MINI电动汽车。记者从长城官方获悉,近日,魏建军董事长与宝马集团董事Klaus Fröhlich(克劳斯·弗洛里希),长城汽车高级副总裁、光束汽车董事长赵国庆一行共同考察位于江苏省张家港市的长城宝马光束汽车项目。目前,长城宝马光束汽车项目已获最新进展,项目公司名称已经核准,项目工厂平面布局总图已经完成。
2.1.1 主体框架
主体框架是由一组铝型材通过角铝连接件连接组成的十字形安装框架,并通过连接法兰可与码垛机器人末端相连,使真空吸盘式多功能抓取装置成为码垛机器人末端执行器。
2.1.2 真空系统及其附件
真空吸盘式多功能抓取装置设有两组真空波纹吸盘吸取装置,每组共有12个真空吸盘组件,均匀分布安装在两个吸盘组件安装板上。吸盘组件安装板通过连接板固定在主体框架上,其中连接板上面设有四组安装孔,从而可以改变安装位置以实现调节两组真空波纹吸盘吸取装置之间的距离,适应不同尺寸的包装物。
两组真空波纹吸盘吸取装置共分为3个区域控制(如图2所示),相对应的真空发生及气动控制装置由3个真空发生器、3个压力开关以及6个电磁阀组成,每个分区有8组吸盘组件,可根据待码包装物的尺寸选择真空吸盘启用区域。真空发生及气动控制装置安装在主体框架上,真空发生器用于产生真空吸盘所需的负压,压力开关5用于真空系统泄漏时,确保真空系统的安全可靠工作[8]。当真空压力设定尚未实现,开关处于关闭状态;真空压力达到设定值时,开关工作,表示吸盘表面密封良好,码垛机器人可以动作[9]。电磁阀组控制真空吸盘吸放以及托盘夹取动作气缸的动作。
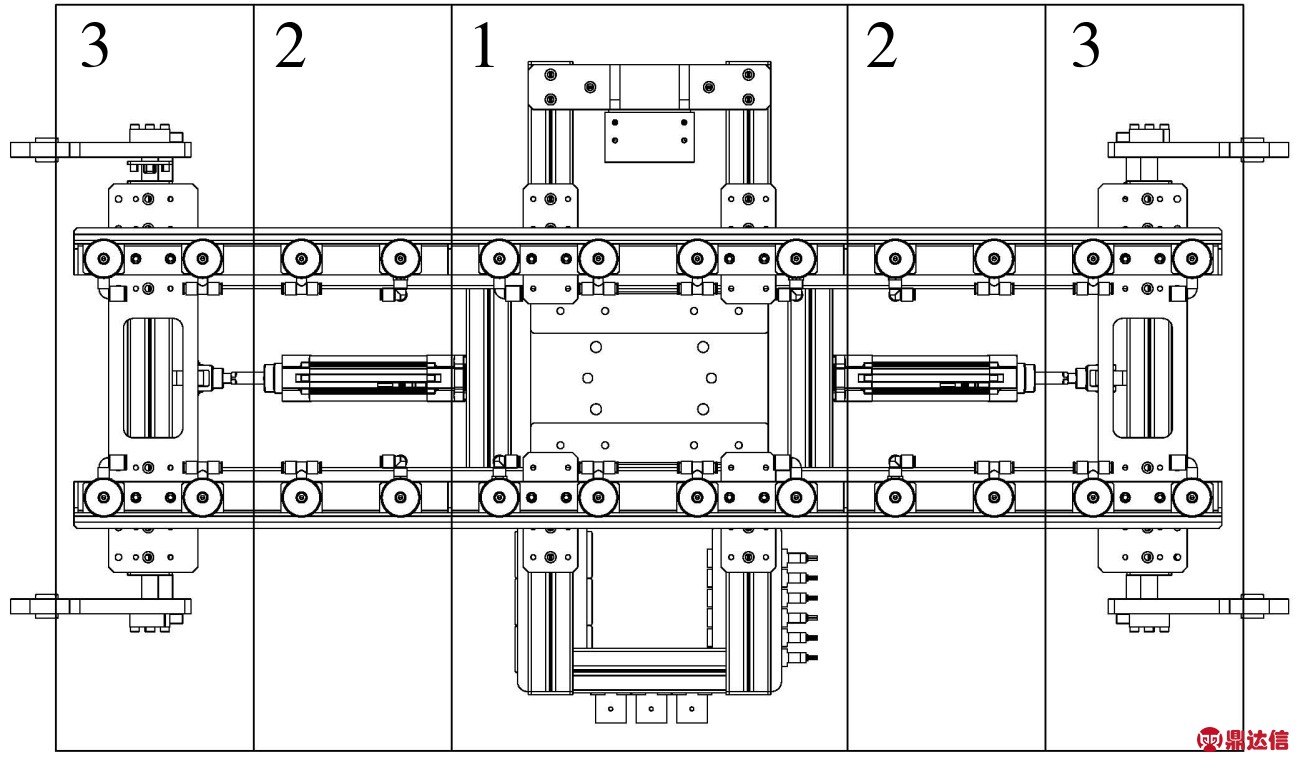
图2 吸盘分区示意图
2.1.3 托盘夹取系统及其附件
两组托盘夹取装置通过安装板对称安装在主体框架上,每组托盘夹取装置由一对托盘勾爪、一个曲柄轴、一个连接轴以及一个动作气缸组成。动作气缸的气缸杆与曲柄轴连接,在电磁阀的控制下带动曲柄轴转动实现两个托盘勾爪的勾取和放松动作。另外,4个托盘勾爪上各附有尼龙护套,以提高托盘勾爪抓取码垛托盘时的摩擦力并防止损坏托盘。
纵观进博会上的各国展台,国外“特产”能在中国市场立足,除了得益于我国对外开放政策外,自身优势也很重要,其在加工、包装设计、市场细分等方面,有不少做法值得我们借鉴。拿泰国烧烤椰为例,普通的椰青经过烘烤,去除了纤维部分,留下的完整部分可以保鲜6个月。此举并未涉及什么技术难题,却使产品实现了从普通水果店铺到超市精品零食货架的跨越。又如,大洋洲一款针对孕妇的奶粉,打出“愿你生子归来,依然少女身材”的广告,十分引人注目。
为了在抓取码放托盘时保护真空吸盘不被托盘损坏,真空吸盘式多功能抓取装置还设有托盘位置检测装置,由位置检测气缸、挡板组成。位置检测气缸内附磁石,外附感应开关,通过设置感应开关位置以保证码垛托盘与真空吸盘之间存在安全距离。
2.2 工作原理
真空吸盘式多功能抓取装置在工作前,可先根据待吸取物尺寸调节两组真空波纹吸盘吸取装置之间距离,再根据码垛托盘尺寸,通过调节4个轴固定座以及4个胀紧套来调节托盘勾爪之间的距离。动作气缸驱动4个托盘勾爪张开,待位置检测气缸确定托盘与真空吸盘距离合适时,动作气缸驱动四个托盘勾爪夹取码垛托盘,之后码垛机器人将码垛托盘放置在预设的码垛区域,动作气缸驱动托盘勾爪收回,以防止托盘勾爪影响吸取包装物。
在现场作业工作完成后,要对现场进行仔细清理,并且注意要恢复现场的有关安全防护措施,还原原有的设备定置,防止由于作业而给现场留下日后的安全隐患。
在吸取待码包装物时,码垛机器人带动真空吸盘式多功能抓取装置下移,使真空吸盘接触待吸取物上表面并产生一定压缩量,吸盘与待码包装物表面密封,此时真空发生器工作产生负压。当压力开关检测气动回路压力达到预先设置值时,表明吸盘表面接触密封良好,真空吸盘紧紧吸住待码包装物,码垛机器人动作,将待码包装物转运到码垛托盘上并进行码垛。通过控制电磁阀换向可使正压气源连通所有真空吸盘破坏真空,令真空吸盘式多功能抓取装置放下被吸取物。往复动作即可实现产品转运码垛。
3 气动系统设计
根据真空吸盘式多功能抓取装置的工作原理可设计出如图3所示的气动系统原理图。
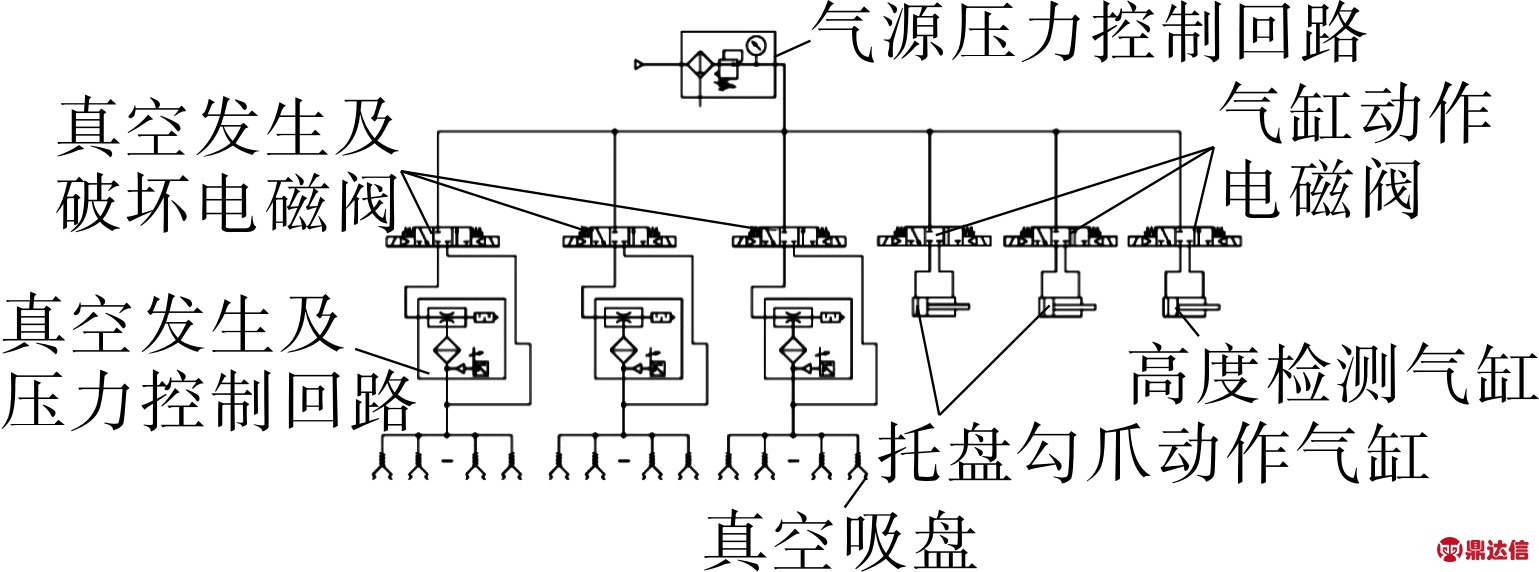
图3 气动系统原理图
真空吸盘式多功能抓取装置气动系统由两部分组成,一是真空吸盘系统,二是动作气缸系统。动作气缸系统中,托盘勾爪动作气缸的安装位置可调,且托盘勾爪在勾起托盘时气缸受力较小,故可综合考虑缸径及行程进行选型;托盘位置检测气缸的设计要点为气缸行程,需满足检测托盘位置保护吸盘的功能需求,可综合考虑真空吸盘式多功能抓取装置的结构尺寸进行选型设计,在此不再赘述。
真空系统中,主要部件为真空吸盘及真空发生器,二者选型成功与否直接关系到真空吸盘式多功能抓取装置能否实现其预定功能,故对真空吸盘及真空发生器进行详细设计。
真空吸盘是通过吸盘与工件之间的密闭空间内形成一定的真空度,使吸盘内外形成一定的压力差,实现吸盘吸起工件的[10]。所设计的真空吸盘式多功能抓取装置共24个真空吸盘分为3组,根据表1包装物规格表,极限工况下,需满足单组8个吸盘能吸起20kg包装物,即每个吸盘需具有能吸起2.5kg重量的吸力。吸盘所产生的吸附力为:
(1)
式中 F——吸附力/N p——吸盘内真空度(相对压力)/kPa A——吸盘的有效吸附面积/cm2f——安全系数
真空度p与吸盘有效吸附面积A分别是真空发生器与真空吸盘选型的关键参数,二者共同影响吸盘吸附力的产生,可先确定其中一个参数再对另一参数进行计算[11]。考虑真空吸盘式多功能抓取装置的结构尺寸,采用直径为5cm的真空吸盘,通常吸盘的有效吸附面积取吸盘面积的80%。真空吸盘内的真空度一般设定为真空发生器最大真空度的63%至95%,这里取80%。安全系数随使用条件而异,水平吸取时,f≥4,垂直吸取时,f≥8,这里安全系数取4[12]。
由式(1)可计算出所需真空发生器需产生的最大真空度为:
根据上述计算结果,即可根据厂商产品资料对真空吸盘及真空发生器进行选型。所设计的真空吸盘式多功能抓取装置选用Vuototecnica品牌的真空组件,真空吸盘型号:08 50 30 MA,真空发生器型号:M18 SSX(在5bar供给压力下,最大真空度可达85 kPa),真空压力开关型号:12 20 10P。
4 结束语
针对现代企业生产多品种、自动化、通用性的需求,设计并制作了一种真空吸盘式多功能抓取装置,该抓取装置采用结构简单、可靠性高、使用寿命长的气压驱动,利用真空吸盘以及托盘抓取机构能够实现纸箱类、纸盒类、袋类、桶类、板材、托盘等包装物的吸取、搬运和码放等动作。与传统抓取装置相比,该码垛机器人多功能抓取装置具有通用性强、不易损坏被抓取物、转运效率高、结构合理、方便安装和调节、成本经济等优点,能适应现代化生产需求,为码垛转运提供了一个新的解决途径,具有较好的应用前景。


