
摘要:针对镜面物体三维测量系统中两显示屏无法精确平行正对的问题,提出了一种在镜面物体三维测量系统中通过软件产生变形条纹等效两显示屏精确平行正对的方法。该方法首先采用机器视觉技术标定两显示屏的外参。然后基于所标定的外参,利用软件编程产生等效两显示屏平行正对的变形条纹,变形条纹通过半透半反镜后所成的像在相机坐标系内呈现前后精确平行正对的关系。最后,利用对应两个显示屏上的变形条纹计算相应位置相位的差值,并通过均方根误差定量评定所提出的方法。实验结果表明,所提出的方法能将水平方向的均方根误差缩减为原来的24.21%,竖直方向的均方根误差缩减为原来的8.15%,从而提高三维测量系统的精度。
关 键 词:三维形貌测量;镜面测量;两平面平行正对;变形条纹;均方根误差
1 引 言
高反光物体表面的三维形貌测量的研究和应用十分广泛,其中,针对镜面的三维光学测量技术因其精度高、速度快等优势而成为该领域的佼佼者[1]。然而,三维光学测量中原始点云数据量十分庞大,而在实际应用中只需其中一部分数据就能代表整个形貌,很多数据信息是不必要的,因此需要对数据进行精简处理[2]。
通常采用三坐标测量机等进行接触式测量或通过改变表面反射特性后再利用光学方法进行测量。不过这两种方法的缺点也比较明显:前者测量速度较慢,且容易引起变形,造成测量误差,对于精度要求较高的表面会有一定的损坏[2];而后者削弱了光学测量方法非接触的优点,并且有些高精度表面不能进行喷涂处理[3]。
镜面或高反光表面的测量原理大多是基于条纹反射法[4-8]。Petz[4]等搭建了一个反射测量系统,该系统由一个CCD相机、一个LCD屏幕和一个水平移动导轨构成。在标定和测量的过程中需要移动LCD屏幕来构建几何关系,从而解决了镜面反射带来的歧义性问题。但系统的几何模型仍是建立相位和梯度间的关系,再将梯度进行积分运算。姜宏志[5]等提出了用于强反射表面形貌测量投影栅相位法的改进:一是基于条纹投射器角度,投射亮条纹和暗条纹;二是利用相机长短不同的多组曝光时间采集图像。通过图像合成算法,将在不同投射亮度条纹、不同曝光时间采集到的多个图像合成一幅无失真的条纹图像,从而解决了传统投影栅相位法拍摄条纹图像失真的问题。但需要计算图像合成算法所需的掩膜图像序列,再进行多组曝光拍摄,操作与计算过程繁琐复杂。Tang[6]等利用一个LCD屏幕、一个半透半反镜和一个CCD相机进行镜面三维形貌的重建。此方法通过移动LCD屏幕和CCD相机,并虚拟一个抛物面来重建镜面的梯度和深度;但受水平移动导轨精度的限制,需要通过积分梯度数据重建三维形貌,因此所获得的三维数据精度不高,无法测量非连续和大梯度镜面物体。Bothe[7]等提出了一个不需要硬件移动的单视场方法,用来建立被测镜面相位和梯度间的关系。但是该方法的测量范围有限,只能测量近似平面的物体,且忽略了镜面反射中深度的影响。苏显渝等人[8]提出利用胶片代替LCD显示屏显示条纹,从而改善了LCD屏幕显示中存在的电子噪声和屏幕闪烁等问题。半透半反镜虽然可以同时解决水平和竖直两个方向的梯度问题,但会限制条纹个数,且求解梯度存在较大奇异性。此方法也是先求得梯度信息,然后对梯度积分,最终得到三维形貌数据。综上可知,由于现有方法主要利用梯度积分获得三维形貌数据,其测量范围受到了限制。
张宗华[9]等人通过使用两个LCD屏、一个CCD相机和一个半透半反镜,直接建立了相位和深度关系的数学模型。通过对变形条纹相位的求解直接获得了反射表面的深度信息。该方法即增加了系统的稳定性,又减小了积分带来的误差累计,从而实现了大梯度及不连续表面的测量。但是该系统需要通过半透半反镜,使得一个LCD屏产生的条纹虚像与另一LCD屏产生的条纹呈现平行正对的关系。目前,通过标定和调整屏幕位置的方法难以实现条纹平行且像素一一对应的效果。针对此问题,本文提出了一种标定与条纹变形相结合的校正方法。该方法通过软件产生反向变形条纹,从而解决了两个屏幕平行正对的问题。
2 等效平行系统的理论分析
等效平行系统的推算主要通过前期标定求取两个屏幕相对于CCD相机的坐标转换关系来实现。标定时利用MATLAB产生变形条纹图,将CCD相机拍摄后的效果等效为两个屏幕平行且正对的关系。在推算过程中,采用最佳条纹选择法[10]获得展开的条纹相位。
(a)折叠相位图
(a)Wrapped phase map
(b)最佳条纹选择法得到的展开相位图
(b)Unwrapped phase map by optimum fringe number selection method
图1 折叠相位图与展开相位图
Fig.1 Wrapped and unwrapped phase maps
传统的差频相位处理方法对条纹图像中的随机误差比较敏感,容易影响计算精度。Towers等人改进了差频方法,提出了最佳条纹选择法,该方法根据3种频率不同的条纹来求解展开相位。条纹图的3组条纹个数应该满足N2-N,N2-1和N2的关系,以确保相位计算过程中的随机误差始终在很小的范围内变化[11]。此方法以产生条纹图的中间条纹作为零级条纹,依次向两边展开。产生条纹时也以中间为标准,依次向两边产生条纹图。图1为折叠相位与采用最佳条纹选择法得到的展开相位图。

图2 双显示屏光学测量系统结构示意图
Fig.2 Schematic diagram of optical measurement system with dual LCD screens
将一个LCD屏上显示的条纹通过半透半反镜成虚像,该虚像与另一个LCD屏上显示的条纹图平行且正对。由于两个屏幕均处在三维空间,故存在3个方向的位置关系,如图2所示。为了使两个LCD屏平行且正对,从正对两个屏幕的方向开始考虑,并从3个角度方向建立三维观察视图,具体包括俯视、侧视和主视方向。
在俯视方向上,LCD1相对LCD2转动一个角度θ。
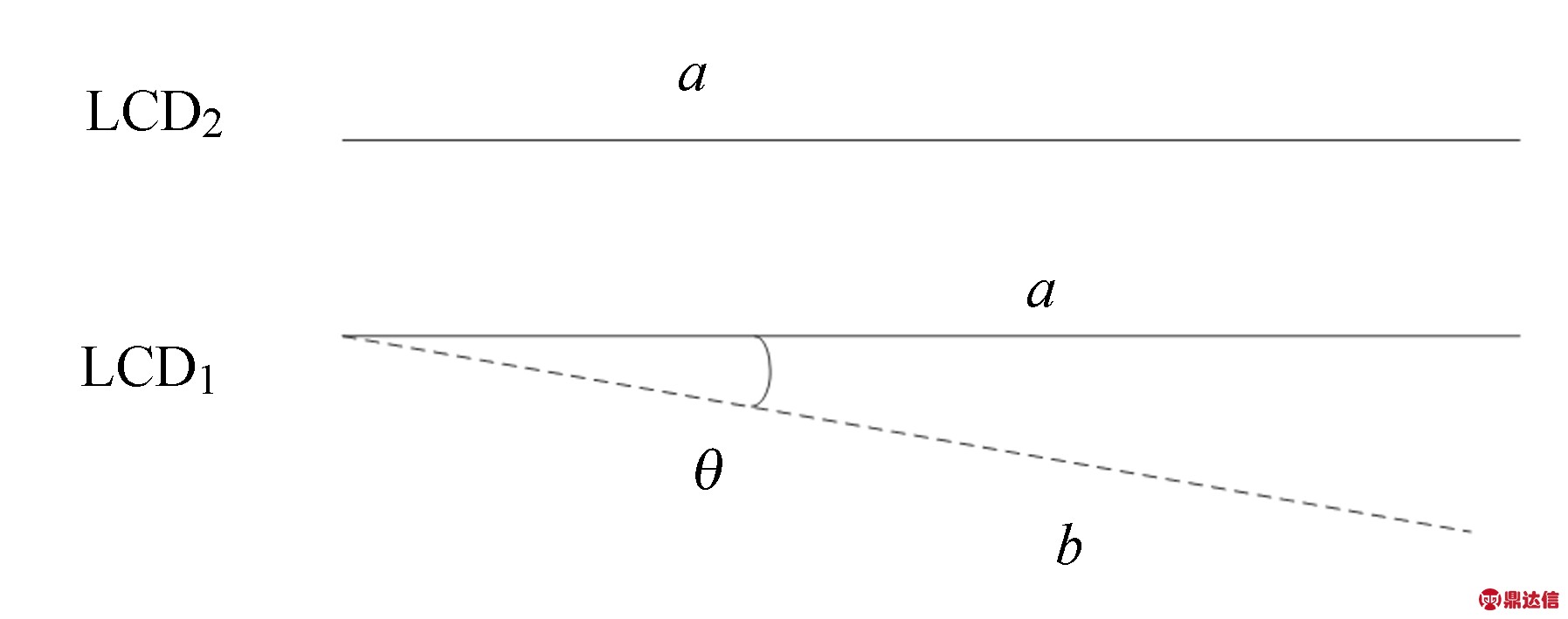
图3 两个液晶屏通过半透半反镜后的平行俯视关系图
Fig.3 Overview of two parallel LCD screens through beam splitter
两个液晶屏经过半透半反镜后应呈现平行关系,但实际中LCD1相对LCD2会产生一个旋转角度θ,如图3所示的虚线位置。两个LCD规格相同,故长度相等,设为a。LCD1屏由于存在偏转,其投影的水平长度为b,则二者满足以下关系式:
![]() ,
,
(1)
其中θ为两屏在竖直方向观察时的夹角。
考虑相机并不是正对垂直而是成一定角度α放置,光线还未到达既定位置,便已穿过LCD1液晶屏成虚像,实际光线与相位间的关系如图4所示。
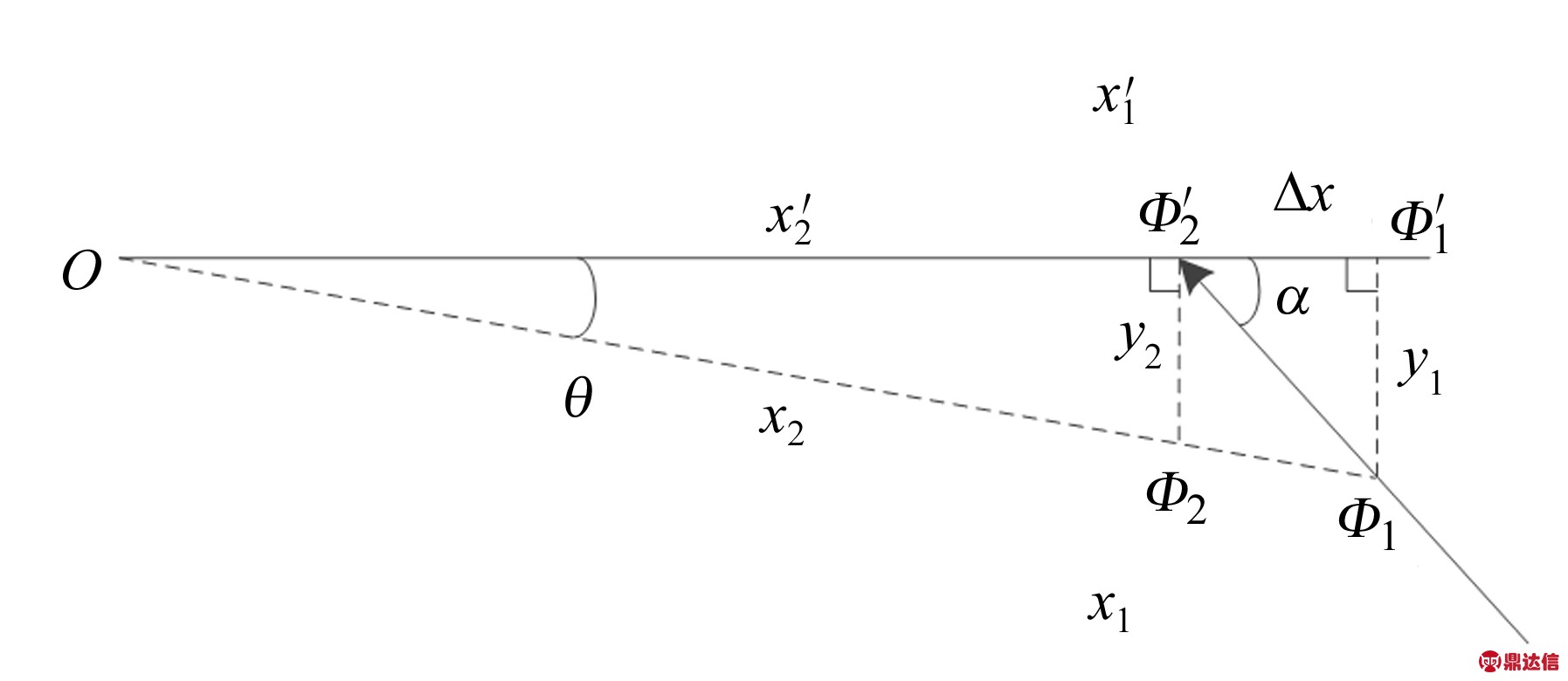
图4 实际光线与相位的关系
Fig.4 Relationship of actual light and phase
此时满足下列关系式:
x2′=x2·cos θ,
(2)
x1′=x1·cos θ,
(3)
y1=x1·sin θ,
(4)
y2=x2·sin θ,
(5)
![]() ,
,
(6)
其中:α为相机光轴与屏的夹角;x1,x1′分别是O点到相位Φ1,Φ1′的距离;x2,x2′分别是O点到相位Φ2,Φ2′的距离;y1,y2分别是Φ1到Φ1′,Φ2到Φ2′的距离;Δx为Φ1′到Φ2′的距离。
由图4可知,屏幕LCD1所成虚像产生偏转,使得原本在正前方产生的条纹发生了变形,此时从侧方观察,应为Φ2的位置变为了Φ1。令左边交点为原点,长度的变化即为LCD屏像素矩阵的下标变化。当实际屏幕上x1的位置显示x2的相位时,该系统相机为侧方位放置的拍摄关系下,两个LCD屏上产生的条纹为平行关系。此时满足如下条件:
x1′-Δx=x2′,
(7)
![]() ,
,
(8)
![]() ,
,
(9)
![]() ,
,
(10)
![]() .
.
(11)
因为LCD屏每个像素位置上的相位Φ=sin x,所以求得x,便可得到相位Φ。依次迭代,每个x2像素位置永远是x1像素位置的![]() )倍。按此规律进行条纹变形,就能在俯视方向观察LCD1中条纹图通过半透半反镜生成的虚像,与LCD2屏幕产生条纹图,由相机角度拍摄所得结果是两幅等效平行正对的图像。
)倍。按此规律进行条纹变形,就能在俯视方向观察LCD1中条纹图通过半透半反镜生成的虚像,与LCD2屏幕产生条纹图,由相机角度拍摄所得结果是两幅等效平行正对的图像。

图5 两个屏幕通过半透半反镜后转动的侧视关系图
Fig.5 Side-view of two LCD screens through beam splitter
在侧视方向上,LCD1相对LCD2转动一个角度β。此时LCD1屏所成虚像相对于LCD2屏的位置关系如图5所示。取当前坐标系xyz为1#坐标系,此时三棱体形正前方的斜面与竖直方向的夹角为β,且后面的竖直面与1#坐标系xoz面内的矩形所成角度为θ。此角度即俯视方向的观察角度,满足关系式:
h′=h·sin β,
(12)
其中:h表示屏幕的宽边长;h′表示屏幕的宽边在xoy平面上的投影长度;β表示屏幕与竖直面的夹角。
图6 三棱体参数图
Fig.6 Parametric diagram of triangular shape
取1#坐标系中三棱体,以其中两个垂直面的边建立新的坐标系x′y′z′,称为2#坐标系。此时LCD1屏产生的条纹如图6中虚线所示。虚线在2#坐标系中对于x′oy′面的投影与y′坐标轴成θ角,满足关系式:
L′=h′·tan θ,
(13)
L′=h·sin β·tan θ,
(14)
式中L′表示条纹在水平方向的最大偏移量。由此求得高度与水平方向条纹起始位置像素间的关系,在LCD1屏上的显示如图7所示。

图7 LCD1从侧视方向观察时产生的变形条纹图
Fig.7 Deformed fringe pattern of LCD1 viewing from side direction
图7中,Lm表示水平可显示长度,L是LCD1的屏幕长度,即像素排列长度。将Lm,L,L′看作像素位置的脚标数值。“O”位置处的虚线代表采用最佳条纹选择法展开相位时,初始相位的位置点,对应0级条纹。此时0级条纹的具体位置需要一次性求解出来。由图7可知,LCD1屏中每行的位置关系仍与俯视方向观察时相同,故套用俯视方向观察时的关系式便可求出每行的0级条纹位置,即有:
Lm=L-L′,
(15)
在主视方向上,LCD2屏相对于LCD1屏转动一个角度Δ。此时两屏可能存在两种情况,如图8所示。两种情况的原理相似,这里就其中一种情况进行推导。
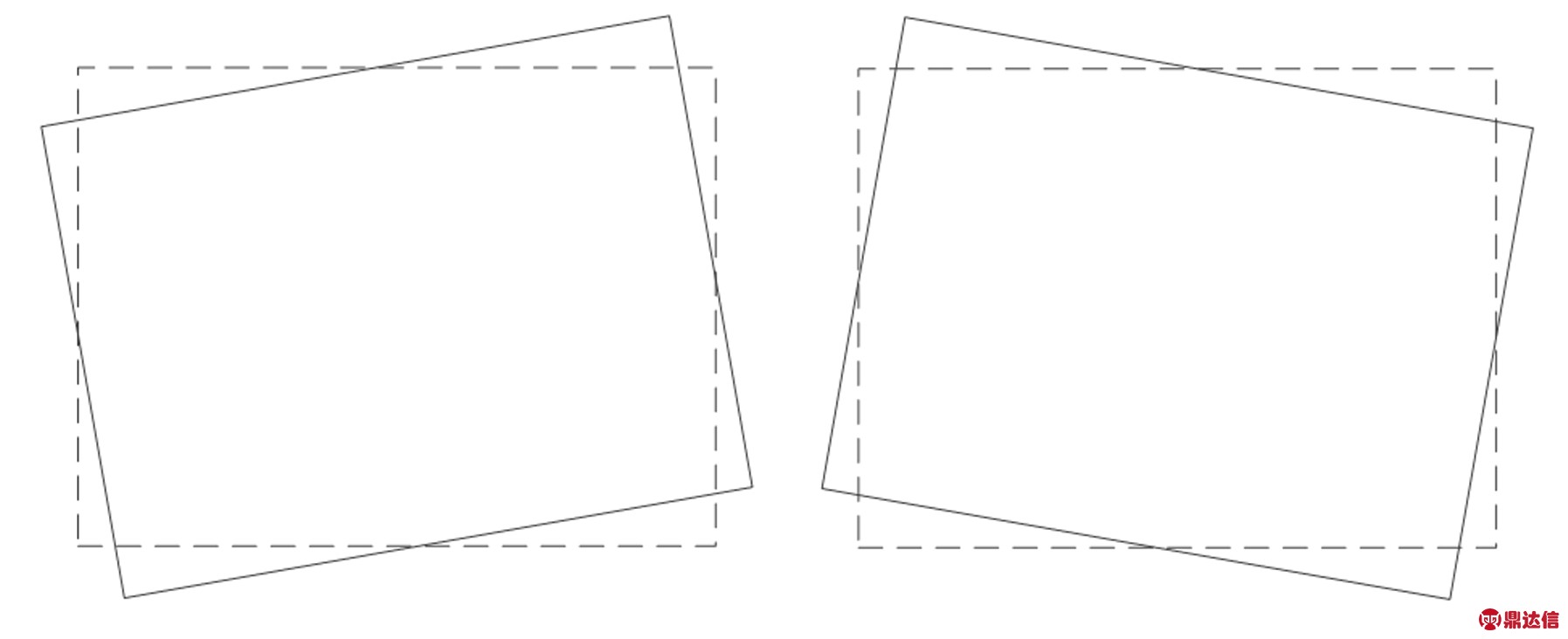
图8 主视方向两屏通过半透半反镜的位置关系图
Fig.8 Front view of two LCD screens through beam splitter
前两次变形均对LCD1屏进行操作。若针对主视方向仍对LCD1屏内的条纹图进行变形操作,则增加条纹的变形难度。此时通过软件对LCD2屏内的条纹图进行变形操作,结果如图9所示。
如图9所示,实线框为LCD2屏摆放的实际位置,虚线框为旋转变形后条纹的效果图。推导过程中以屏幕左上角位置为对准标准,此时条纹变形后左上角位置出现平移距离,假设为ΔL,则有:
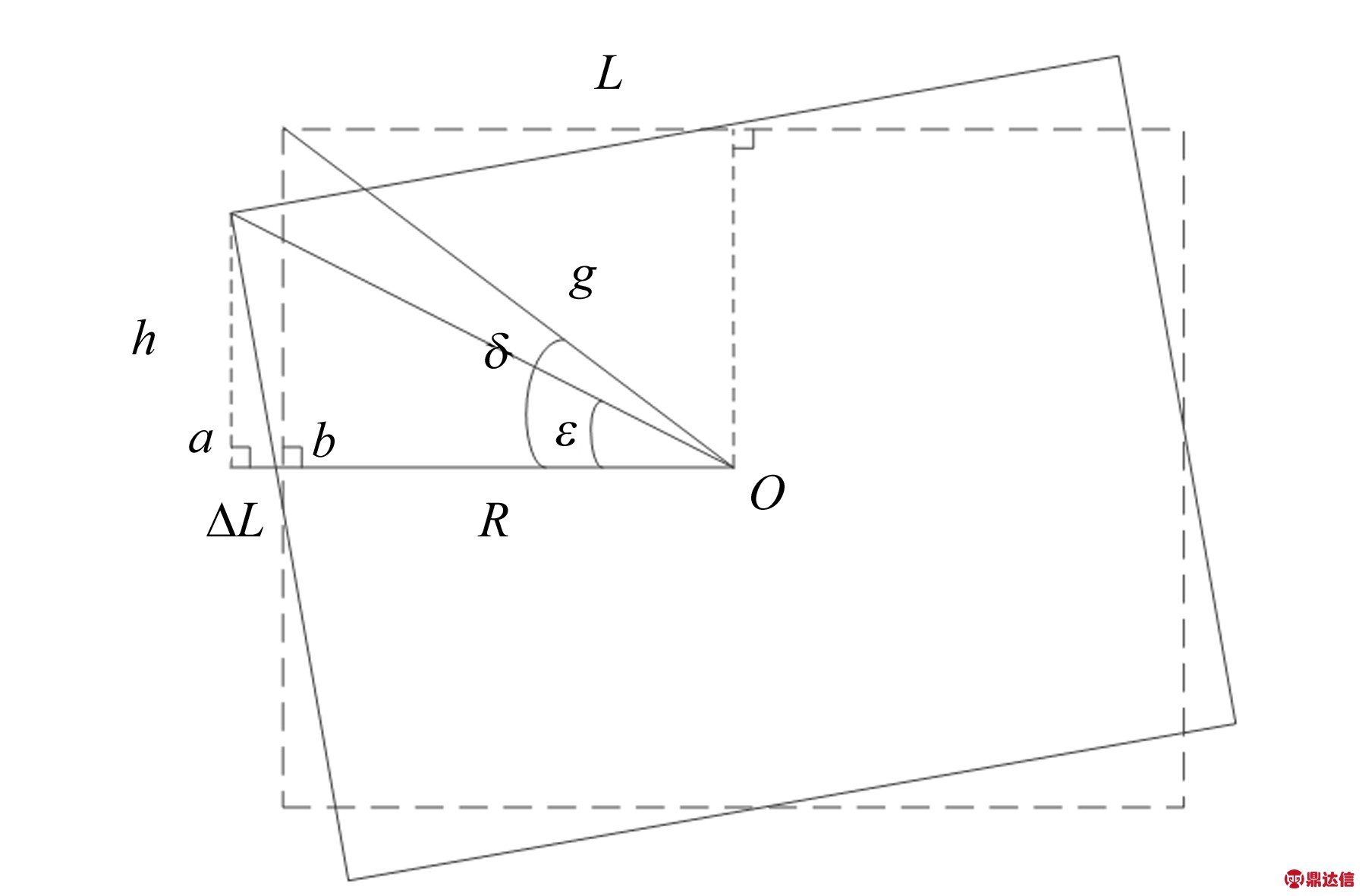
图9 LCD2屏产生的旋转变化效果图
Fig.9 Diagram of fringe pattens on LCD2 screen after rotation
,
(16)
![]() ,
,
(17)
 ,
,
(18)
![]() ,
,
(19)
Δ=δ-ε,
(20)
R=g·cos(δ-Δ),
(21)
![]() ,
,
(22)
式中:ε表示图形变形旋转前屏幕中心O点的夹角;δ表示图形变形旋转后屏幕中心O点的夹角;g表示LCD屏对角线长度的一半;L表示屏幕的长边长度;R表示O点到a点间的距离;ΔL表示a点到b点间的距离。
所以旋转LCD2屏产生变形条纹后,0级条纹会移动ΔL的距离。在产生变形条纹时,必须将0级条纹移动一个变化量才可以得到两个屏幕产生的变形条纹图。相对于侧向位置放置的相机,通过半透半反镜观察时条纹呈现平行正对的效果,平移过程如图10所示。
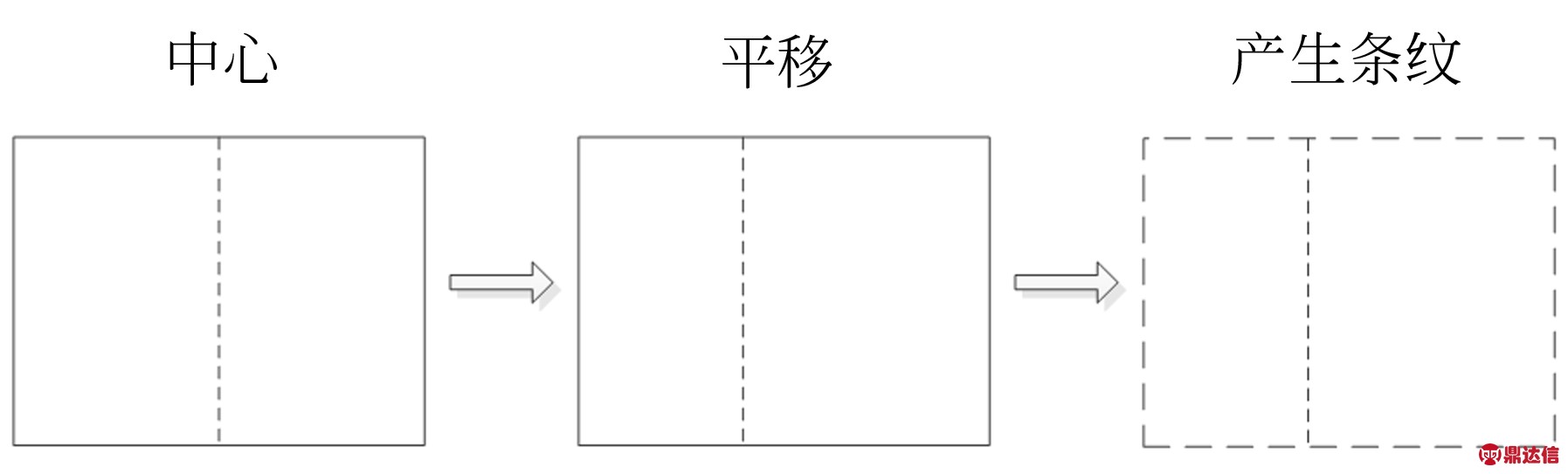
图10 0级条纹的平移过程图
Fig.10 Translation process of zero order fringe
通过0级条纹的平移可使两个LCD屏产生的条纹图在主视方向呈完全正对的关系。
3 实验与结果分析
实验的硬件系统如图11所示。在光学平台上,LCD1与LCD2分别为两个液晶显示屏,两屏间设有为半透半反镜,位于两屏间立体角的平分面上。3个部件均由角位移台固定在光学平台上。CCD相机型号为SVS SVCam-ECO-4IO系列eco655CVGE4IO,分辨率为2 448 pixel×2 050 pixel。角位移台的最小读数为5′。LCD液晶屏是LG公司出品的型号为LP09QX2视网膜屏,分辨率为2 048 pixel×1 536 pixel,尺寸为24.638 cm(9.7 inch)。
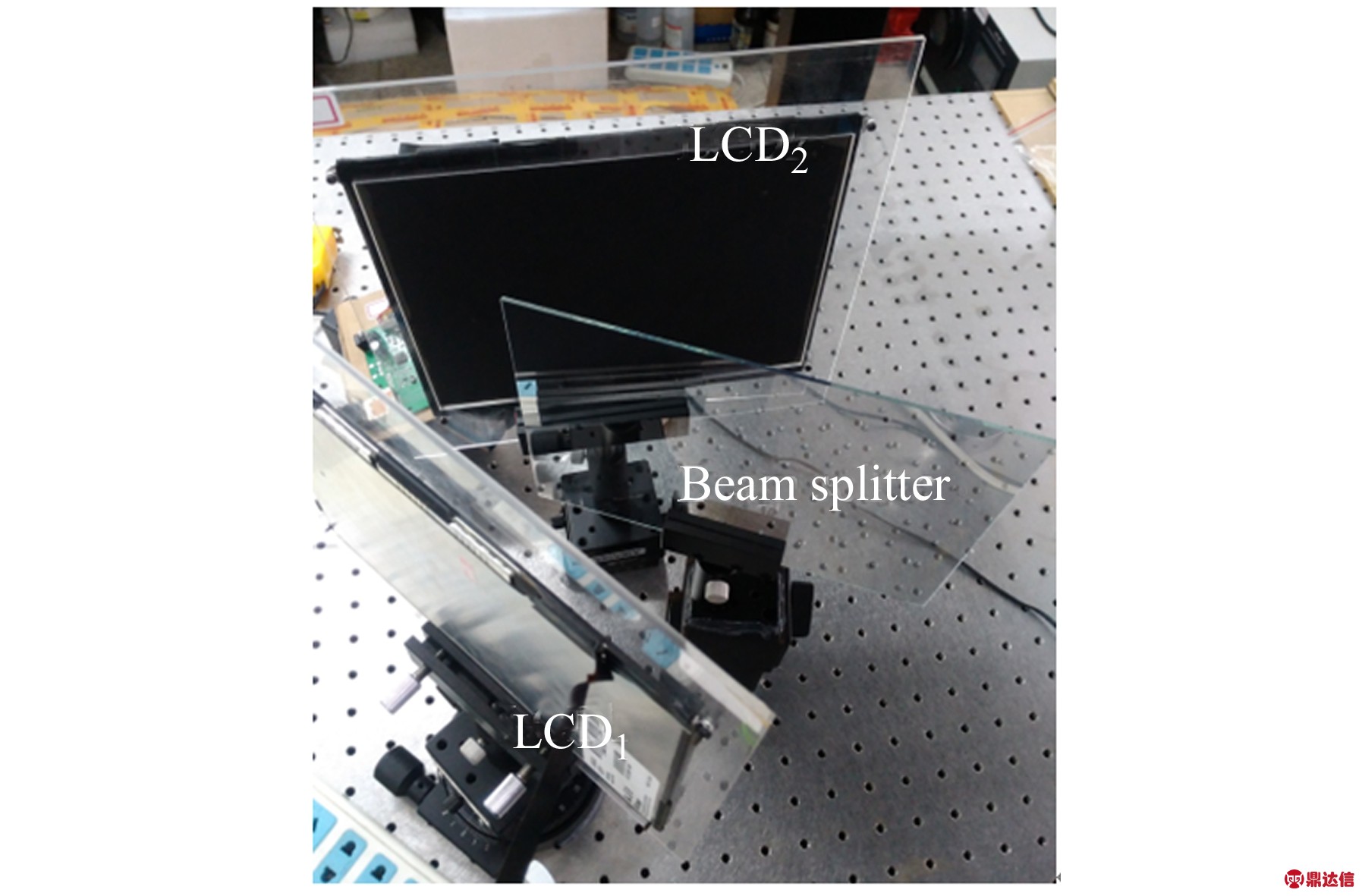
图11 实验系统硬件结构图
Fig.11 Hardware diagram of experimental system
实验步骤如下:1)搭建系统并标定相机的内参;2)利用MATLAB软件生成棋盘格图案,并分别显示在LCD1与LCD2屏上,利用所得到的相机内参标定两个屏幕相对相机的空间角度位置;3)利用角位移台调整两个屏幕的相对位置;4)重复步骤2-3,直至两个屏幕的相对空间角度调整到0.8°以内(受角位移台最小读数、手动调整误差、标定误差综合影响的结果);5)在两个LCD屏上分别产生没有变形的正弦条纹图;6)利用第4步求得的两屏间的相对角度关系,分别在两个LCD屏上产生变形条纹图,且变形条纹的条纹数目与第5步中的完全相同。从而最终生成等效两个屏幕平行且正对的条纹图像。
为了定量评价本文所提出的等效条纹产生方法,选取变形前后在两屏幕上拍摄到的任意相同行列有效像素的展开相位,求解其相应的差值和均方根误差。两个屏幕通过半透半反镜所成的像越接近平行,得到的均方根误差越接近零。若变形后均方根误差明显减小,那么相机拍摄角度得到的等效变形条纹图则说明两个屏幕更接近于平行关系,依此可定量评定变形前后平行精度的提高幅度。
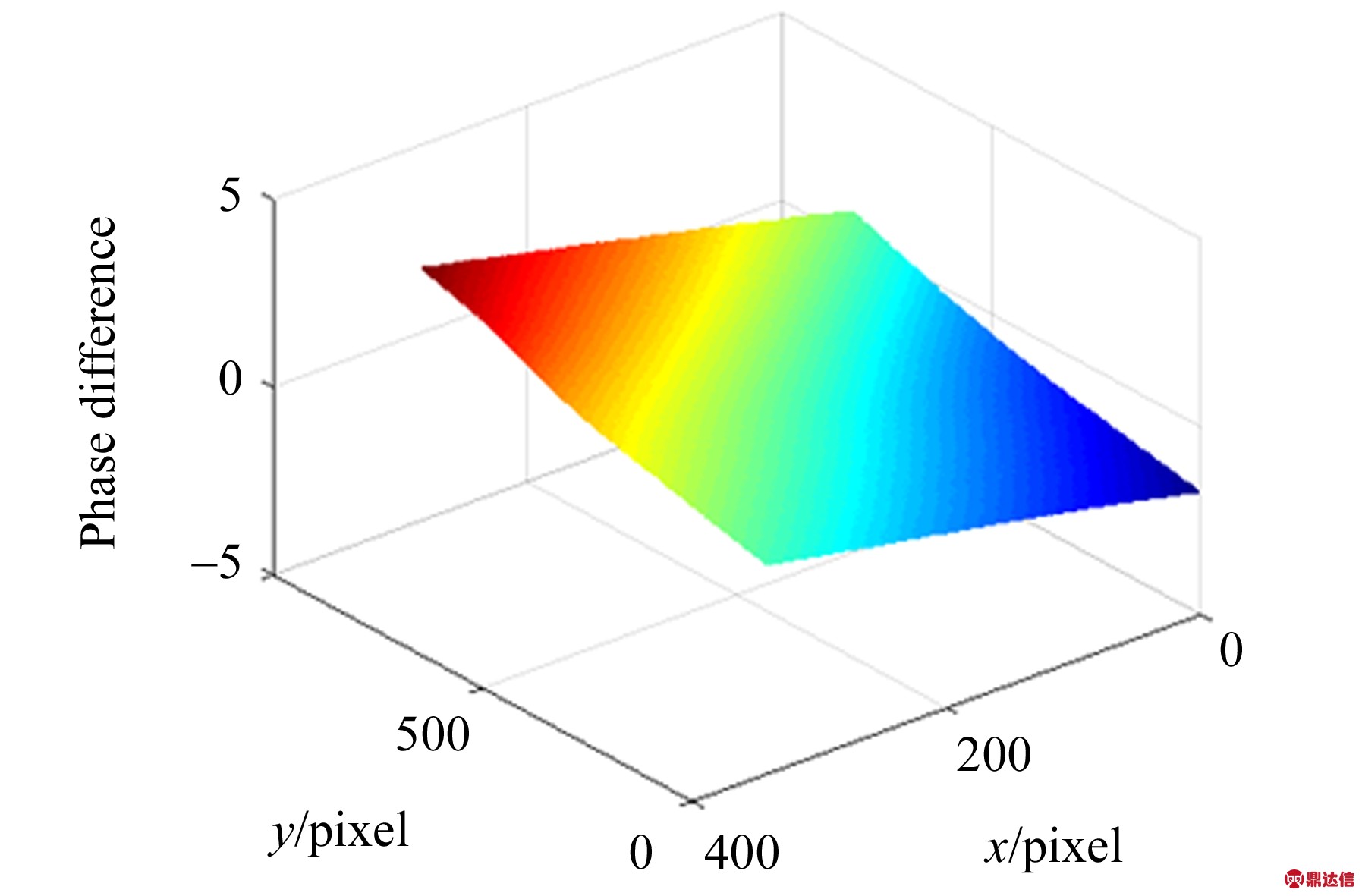
此时选用最大分辨率为2 448 pixel×2 050 pixel的相机进行拍摄。由于采集到的图片边缘部分相对于中心部分的噪声和畸变较大,选取中心2 000 pixel×1 600 pixel的区域进行计算。在不影响结果的情况下,为了减少计算量,根据竖直条纹在竖直方向的相位差较水平方向缓慢的特点,水平方向每隔一个像素取一个值,竖直方向每隔3个像素取一个值,所以参与运算的像素数为1 000×400。经上述步骤得到的两个屏幕上条纹图在变形前后的相位差如图12所示。
图12显示了两个LCD屏上的条纹未变形和变形后所对应的相位差。变形前两屏上的相位差随着像素位置的变化逐渐增大,此时两屏有较大角度。变形后两屏上的相位差随着像素位置的变化也呈现逐渐增大的趋势,但基本稳定在某一定值附近,说明此时两屏间角度很小,基本可以忽略。
(a)变形前两屏的相位差
(a) Phase difference of two screens before deformation

(b)变形后两屏的相位差
(b) Phase difference of two screens after deformation
(c)两屏变形前后相位差的比较图
(c) Comparison of phase differences before and after deformation
图12 条纹变形前后的相位差图
Fig.12 Phase difference before and after deformation
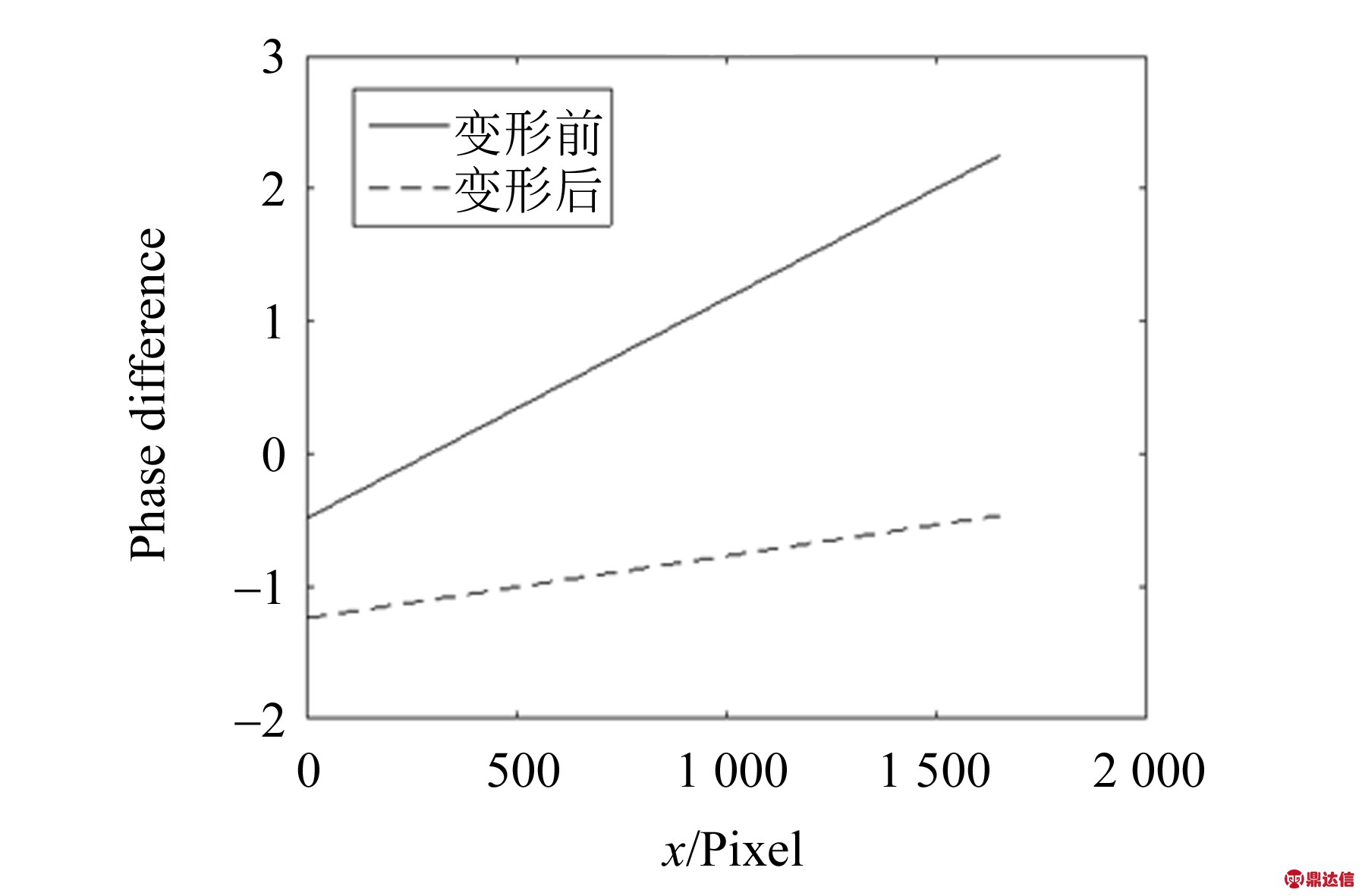
为了更加清晰地显示变形前后两个显示屏上相位的变化,任选相同的一行和一列(文中选取第1 000行与第800列,且选择1 700×1 700的有效像素范围)像素对应的相位值,求解并显示相应的相位差,结果如图13所示。
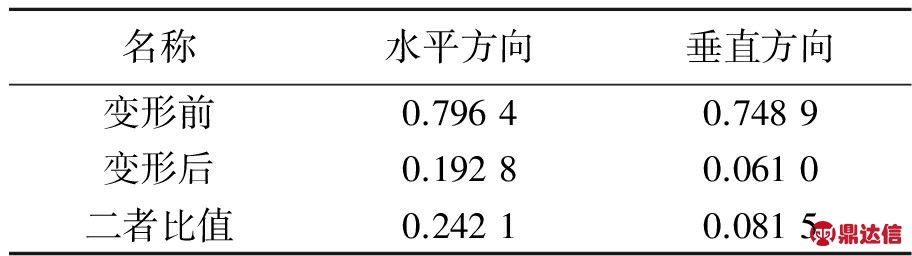
对图13中的剖面数据求解均方根误差,结果如表1所示。水平方向的均方根误差缩减为原来的24.21%,竖直方向的均方根误差缩减为原来的8.15%。因此,两个没有平行正对关系的屏幕通过软件产生变形条纹的方法进行修正后,可等效为两个平行的屏幕。
(a)水平方向
(a) Horizontal direction
(b)竖直方向
(b) Vertical direction
图13 条纹变形前后相位差的截面图
Fig.13 Profiles of phase difference before and after deformation
表1 变形前后相位差均方根误差值
Tab.1 Mean square errors of phase difference before and after phase deformation (rad)
4 结 论
本文针对镜面物体三维测量系统中两显示屏无法精确平行正对的问题,提出了一种通过软件方法产生变形条纹图,再通过调整条纹使两显示屏的平行正对的方法。该方法基于机器视觉技术所标定的外参,利用软件编程产生等效两显示屏平行正对的变形条纹图。实验结果表明,所提出的方法能将两屏间相位差的均方根误差在水平方向缩减为原来的24.21%,在竖直方向缩减为原来的8.15%,提高了三维测量系统的精度。本文所提出的变形条纹等效两平行显示屏的方法可实现非连续镜面物体表面三维形貌的精确测量。


