
摘要:为了降低野外对空中观测实验的复杂度和成本,设计了基于VGA接口液晶显示屏的通用空中目标室内模拟仿真平台,并对该平台所采用的基于空间位置/大气密度的空中目标形态/能量实时更新模拟算法进行研究。平台由S3C2440处理器和VGA接口组成,在每一时刻计算模拟目标的瞬时高度、距离、速度,结合这些参数并依据大气密度变化和能量制约算法,实时生成模拟目标的显示位置和尺寸大小,并通过VGA接口把模拟目标显示在液晶屏上。测试结果表明,利用该平台对空中的目标模拟,与传统的野外实测相比降低了90%以上的成本,且具有可随意变更观察目标和实验重复性好的优点,能满足在单一背景下模拟空中目标的需要。
关 键 词:VGA;空中目标;模拟器
1 引 言
当前,以光学观测技术观测空中目标的平台一般都由观测系统和目标模拟器组成,为了测试观测效果,通常都需要到室外进行实际观测,这样做虽具有良好的效果,但使用成本很高,观测的难度很大,且目标模拟器特性单一,不利于测试更多的系统参数。
基于以上原因,本文利用Samsung公司的S3C2440处理器设计了一套基于VGA接口液晶显示屏的通用空中目标模拟平台[1-5]。该平台适用于各种光学观测空中目标的场合,由S3C2440处理器、TFT液晶屏、四线电阻触摸屏、ADI公司的视频D/A芯片ADV7120和VGA接口组成。在使用时可以根据开发者的需要自行设计目标的原始样式(比如飞机、导弹等),并把该原始样式以图像的方式烧写到S3C2440处理器的FLASH存储器中,然后通过主控端触屏设置目标的高度、距离、速度、大气密度变化、运行方式的参数,即可生成该目标样式的模拟运动形态,并通过VGA接口传递给大型液晶显示屏,光学观测系统只要对着显示端就可以模拟的观察目标,与传统的室外实测观察相比具有使用简单、成本低、重复性好、且可随意修改观察目标的优点。
2 总体设计
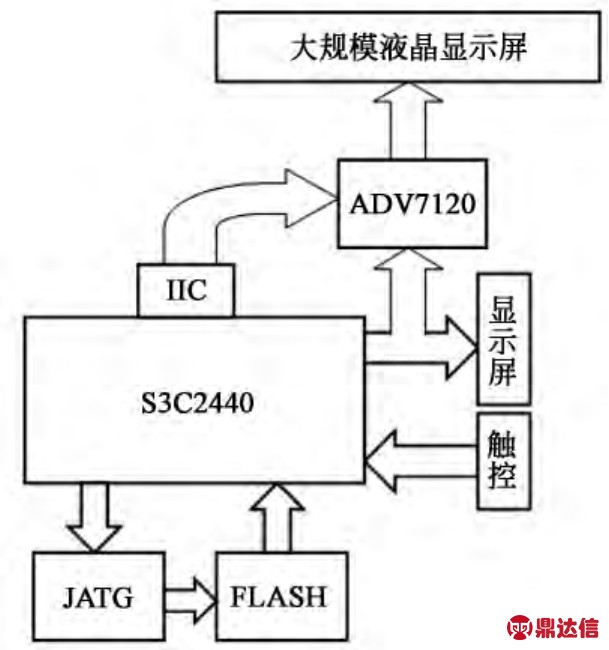
图1 总体硬件设计
Fig.1 Design of overall hardware
通用目标模拟器平台的硬件部分由微处理器S3C2440、分辨率480×272的TFT液晶显示屏、4线电阻触屏、NAND FLASH 存储 器和ADV7120视频 D/A 转换器组成[6-11]。总体硬件设计如图1所示。
图中S3C2440处理器内部集成了触屏驱动接口、TFT液晶屏驱动接口、NAND FLASH驱动接口和JATG接口,因此平台只需要设计VGA接口驱动就可以。
平台的软件程序流程如图2所示。
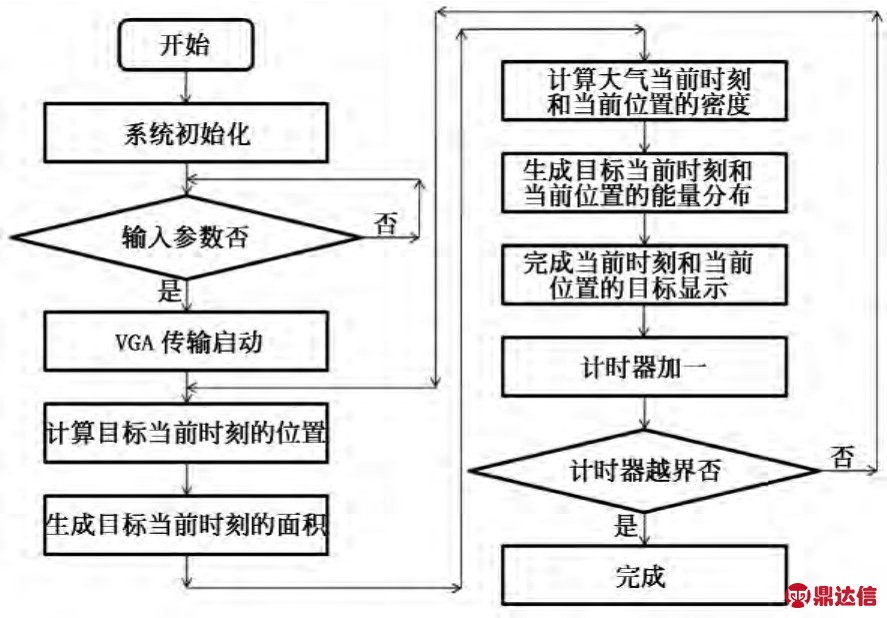
图2 程序流程
Fig.2 Flow of process
在程序中首先要输入目标的原始高度、原始距离、原始速度、大气密度变化、运行方式等参数,当所有参数设置完成后,系统会每隔10ms计算一个时间单位内的模拟目标,计算要依据设置的参数,首先算出目标在当前时间单位内的“空间位置”,依据空间距离与空中目标能量(面积)的反比关系,形成目标的“观察面积”,然后把“空间位置”转换成屏幕平面上的“显示位置”;接着计算当前时间单位内的“大气密度”,依据大气密度与空中目标能量分布(边界模糊)的对应关系,形成目标的“模糊分布”,综合这两种因素,就会形成在屏幕平面上显示的模拟空中目标。
3 VGA接口驱动设计
VGA(Video Graphics Arrnay)接口是IBM公司提出的应用于PC的显示接口。该由于该接口具有显示速率快、分辨率高、颜色丰富等优点,目前仍然广泛存在于彩色显示器领域。VGA接口一般为DB15型的插座,其引脚定义如表1所示。
表1 VGA接口引脚说明
Tab.1 Introducing of VGA interface
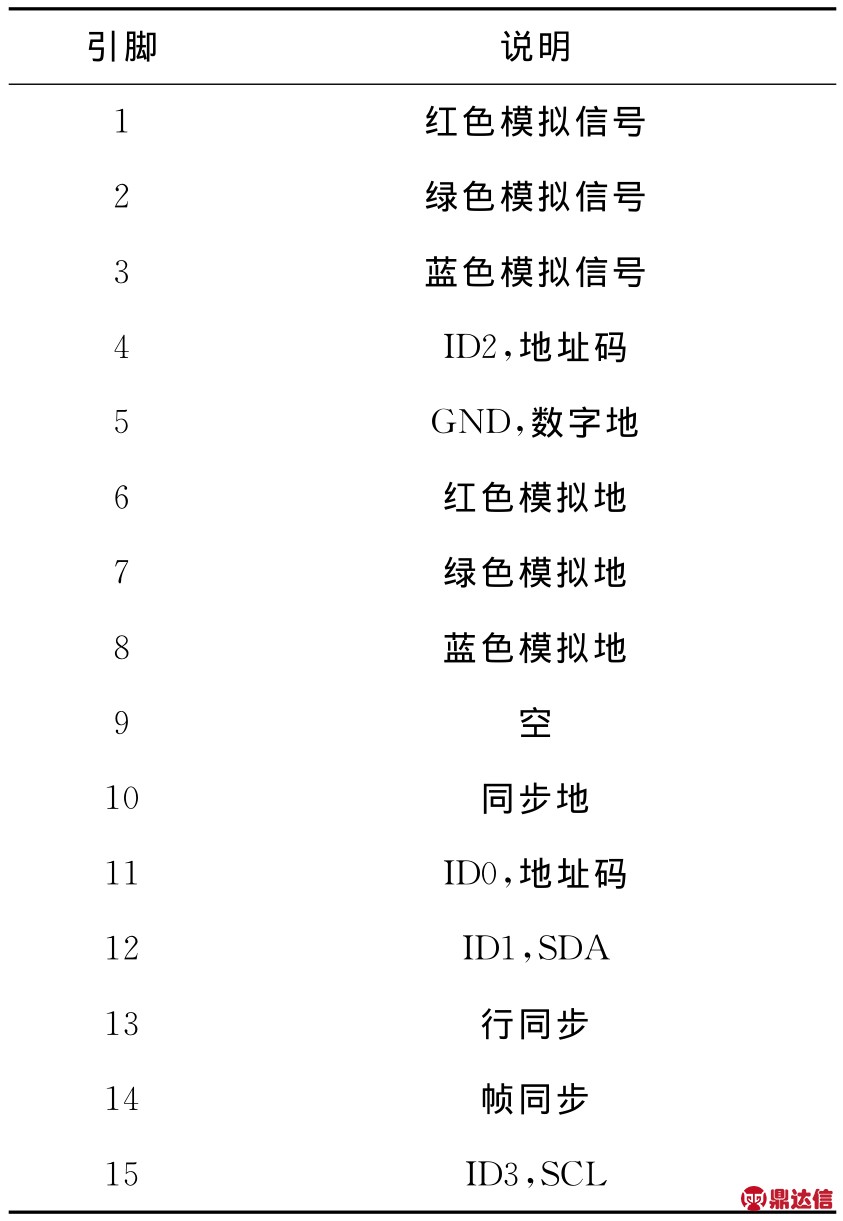
VGA接口使用的是模拟RGB信号通道,关键信号有5个,分别是红色模拟信号、绿色模拟信号、篮色模拟信号、水平同步信号、垂直同步信号。图像形成方式为逐点逐行扫描,从左至右,从上而下的进行扫描,每行结束时,用水平同步信号进行同步。扫描完所有的行后用垂直同步信号进行场同步。
由于S3C2440自带的液晶显示屏驱动模块,通过芯片手册比较VGA接口时序和S3C2440自带的液晶显示屏驱动的扫描时序,可以发现两者相似度很高。但是S3C2440自带的液晶显示屏驱动控制器输出的是RGB数字信号,而VGA接口输出的是红绿蓝模拟信号,因此需要通过D/A转换来完成两者的匹配,为满足真彩色(3个色彩通道共24位)的要求,需要单个通道达到8位的转换精度;为满足帧频的要求,单个像素点的扫描时钟频率必须大于27MHz;而且必须保证至少有3个通道同时转换,以满足红绿蓝(RGB)3路信号的同时输出。为满足以上要求,本平台采用ADI公司的视频D/A芯片ADV7120。该芯片的像素扫描时钟频率有30、50、80MHz 3种等级,并集成了3路独立的8位高速D/A转换器,可以同时处理红、绿、蓝3路视频数据,满足了本平台对高分辨率模拟接口时序的需要,具体的电路连接方式如图3所示。
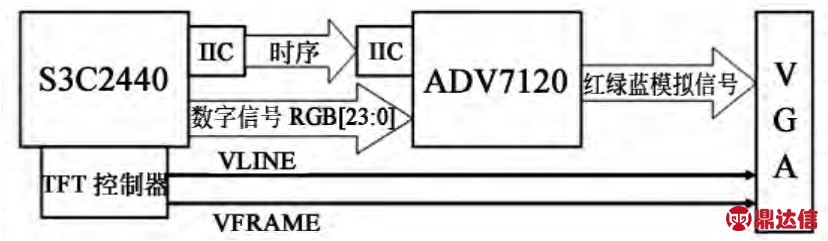
图3 S3C2440与ADV7120的连接原理图
Fig.3 Uncorrected correspondence between the LCD screen and touch screen
平台不需要额外编写VGA接口驱动程序,只是利用S3C2440自带的液晶显示屏驱动模块就可以实现VGA视频的输出。
4 算法设计
平台算法设计主要是空中目标实时更新模拟算法,也就是把给定的目标通过计算在大屏幕平面上显示出来,包括目标的位置、面积和能量分布三部分。
4.1 模拟目标的显示位置与面积
计算目标在屏幕上的显示位置需要参考目标的高度和运行轨迹,其计算公式如下:
而目标在屏幕上的面积大小与目标到观察设备的“实际距离”有关,经过多次实验总结了如下的经验公式:
式中:S0为原始面积,r0是原始直线距离,rd当前时刻的直线距离,k是经验常数,其值在0.8~0.9,该公式体现了“目标面积与直线距离成反比”的规律,即观察设备与目标的直线距离减半,则目标的面积加倍,原理如图4所示,具有较好的实现效果。
直线距离的计算需要利用目标当前的高度和距离,由于目标是运动的,就需要参考原始距离、原始高度、速度曲线和运行轨迹几个方面的因素,这里面假定目标是由远到近,当算出目标的直线距离后,参照目标的原始距离,计算出目标图像的放大倍率,以目标显示位置处的中心点为核心,按照目标与背景区域的边界形状保持目标有效像素的同步生长,生长的比例与放大倍率相同。
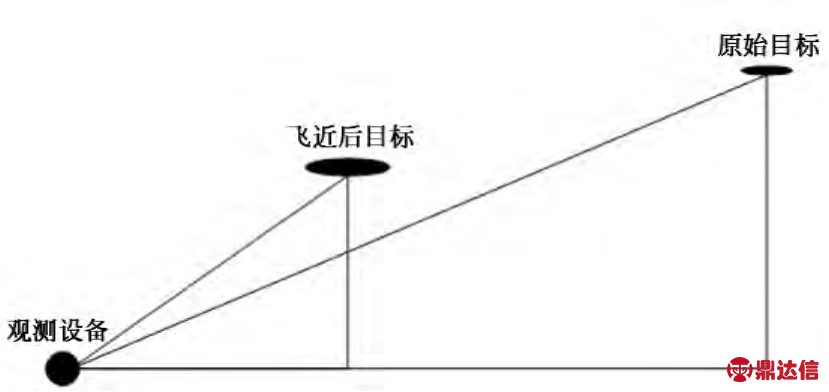
图4 目标面积计算的原理
Fig.4 Numeration principle for target area value
4.2 模拟目标的能量分布
模拟目标在屏幕上显示的能量分布(模糊程度)与当前时刻的的大气密度参数有关,大气密度与大气湍流的关系密切,涉及密度、温度、湿度、风速等,计算非常复杂,为了简化设计,提高图像处理的实时性,本平台在大气湍流理论的基础上进行了简化,提出了“大气密度-目标像素灰度梯度均匀模糊算法”,其计算公式如下式:
式中:r0是原始直线距离,rd当前时刻的直线距离,g0是原始大气密度,g(t)当前时刻的大气密度,该公式体现了目标模糊灰度梯度随着距离变小而减小,随着大气密度的变小而减小的规律,在确定目标的显示面积后,计算目标当前位置的目标模糊灰度梯度,从目标中心位置开始以目标模糊灰度梯度进行灰度递减,直到目标的边界,效果如图5所示。
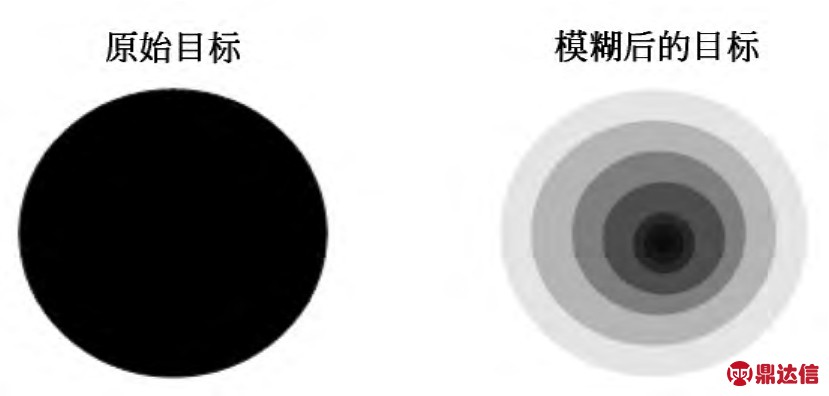
图5 原始目标按灰度梯度模糊的效果
Fig.5 Original target by shades of gray blur effect
在计算完成目标显示位置,目标面积大小,并完成目标模糊后,就把目标显示在大屏幕上,这时检测观测设备电机的伺服性能,即观测设备能否有效的始终紧跟目标,让目标出现在观测设备中。
选取2017年9月~2018年1月本院收治的急性缺血性脑卒中患者15例作为研究对象,其中,男9例,女6例,年龄41~78岁,平均年龄59.48岁,病发到入院时间2~4.5 h,平均(3.20±0.15)h,有11例患者伴有语言障碍,15例患者肌力均为0级。
5 系统实测

图6 观测平台
Fig.6 Observation platform
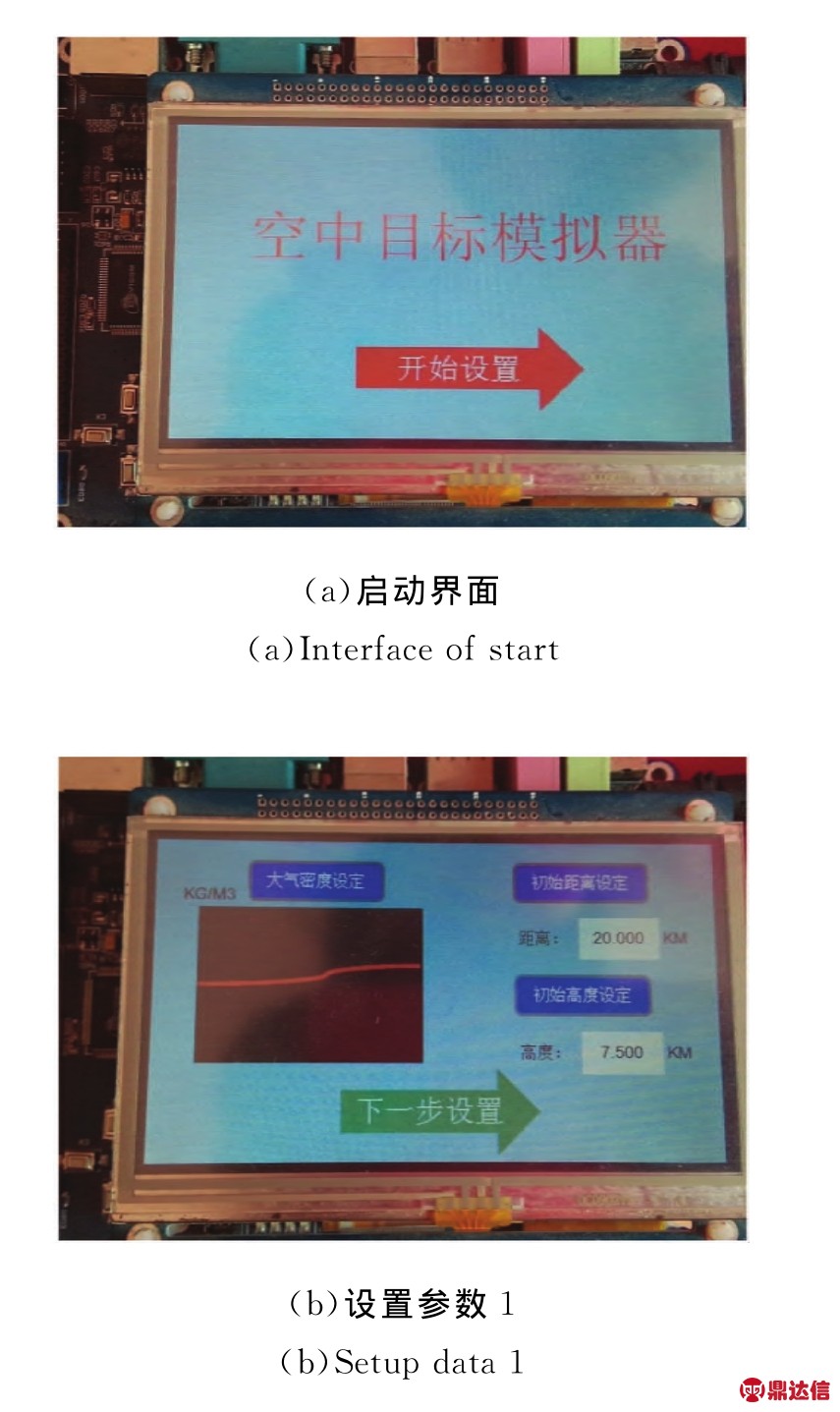
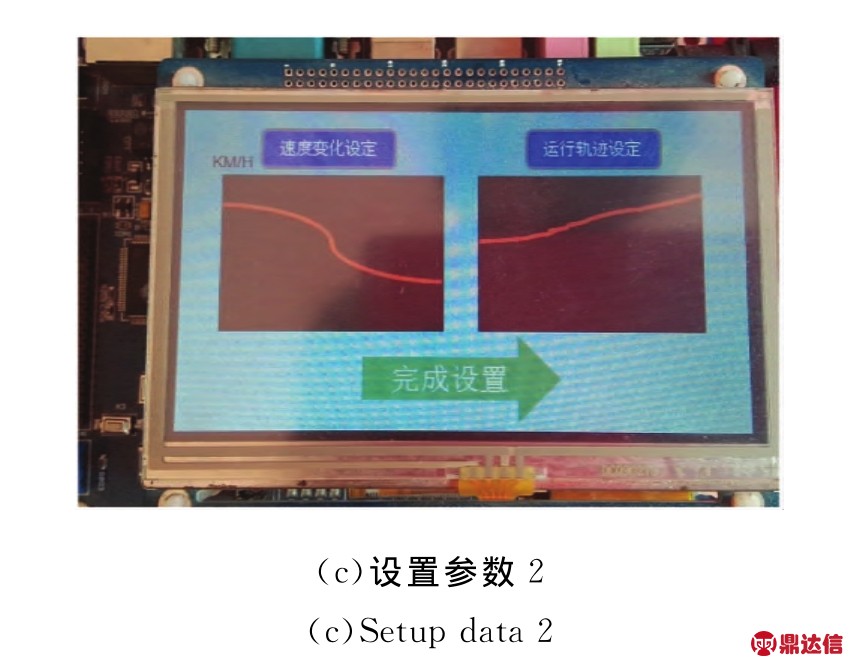
图7 主控端参数设置过程
Fig.7 Remote parameter setting process
图7(a)表示主控端的初始界面,当点击“箭头”按键后,主控端进入图7(b)界面,当设置好大气密度、原始高度、原始距离后,点击“箭头”按键进入图7(c)界面,当设置好速度曲线和轨迹曲线后,点击“箭头”按键进入大屏幕显示状态。图8(a)是初始显示的空中目标,图8(b)是5min后显示的空中目标,可以看出,目标更大,打在大气密度的影响下出现了一定的虚化。
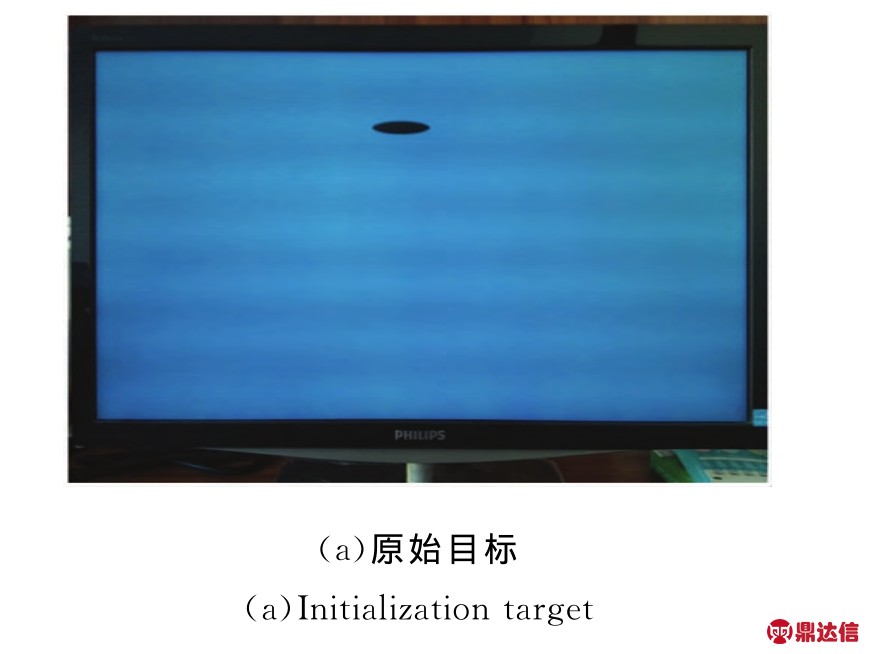
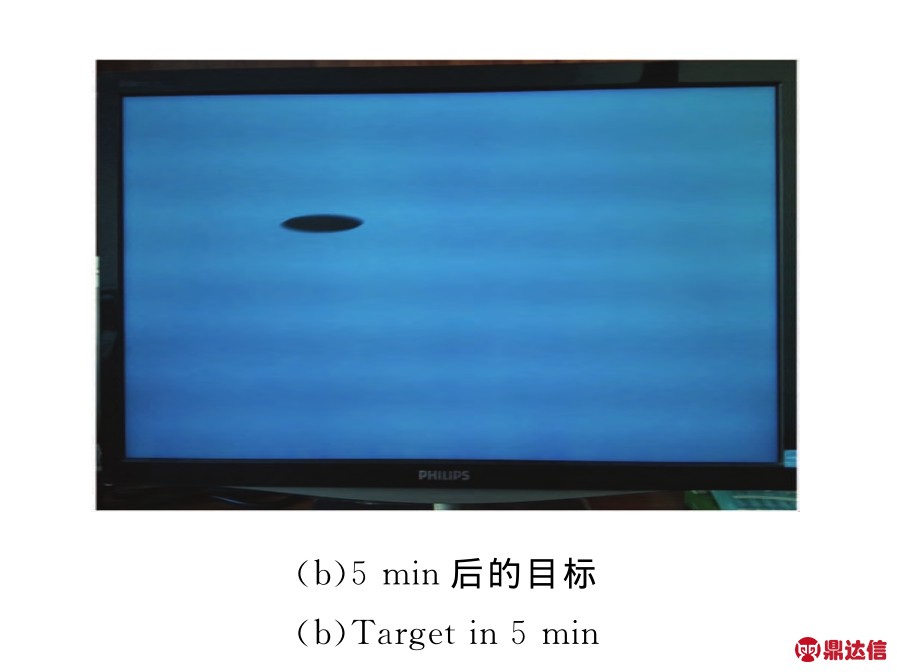
图8 液晶显示屏显示效果Fig.8 LCD display
6 结 论
实验证明,本系统实现了基于VGA接口液晶显示屏的通用空中目标模拟器解决方案,系统采用S3C2440处理器驱动触摸屏,TFT液晶屏和ADV7120,结合空中目标实时更新模拟算法,并可以根据需要任意修改模拟的观察目标,通过仿真调试可以发现大量的问题,测试更方便,等问题调试完毕后再进行室外实测,可以适用于多种仿真观测场合,与传统的野外实测相比实验成本降低了90%以上,同时具有测试简单、可随意修改观察目标和实验重复性好的优点。


