
摘 要:超弹性软管失稳实验控制系统通过软管膨胀过程模拟生物工程脑肿瘤生长机理。该实验控制系统选用S7-200PLC为控制器,采用STEP7-Micro/WIN编程软件和MCGS组态软件混合编程,前者进行程序监控,后者进行实验状态监控。文中主要研究超弹性软管失稳实验控制系统中一路多位同步控制和实时温度监控的控制方法。超弹性软管失稳实验控制系统中的一路多位同步控制方法,是根据PLC数据地址的储存特点进行设计,即在试验中8个零点同时控制8个电磁阀组合成多路控制;实验室环境温度通过温度传感器进行数据采集,将采集数据通过扩展模块传输到PLC的CPU中进行矢量运算,计算后的结果为下步动作的实现提供依据。超弹性软管失稳实验控制系统控制逻辑严谨、易于操作、设计成本低、性价比高、拥有良好的人机界面,其功能在生物工程学、医学等多个学科上的研究具有重要意义。
关键词:超弹性软管失稳实验控制系统;S7-200PLC;一路多位同时控制;温度矢量计算
0 引言
超弹性材料作为一种生活中常见的材料,其应用也很广泛,例如在建筑工程、航空航天、生物工程等领域。超弹性软管在经过一段时间充气后会产生局部起鼓现象,这与复合材料中的折曲带形成、动脉瘤的形成等常见的工程和材料问题有很多相似点。所以,超弹性软管在充气后产生的相关问题如稳定性、起鼓后的形貌等一直受到广大科研人员的关注。1990年,Kyriakides等对轴向拉伸充气管局部失稳扩展压力进行理论预测;2007年,Pamplona课题组对局部缺陷超弹性软管在不同受力下的失稳进行了研究;2013年,Guo等对超弹性软管失稳起鼓临界压力和形貌进行了研究[1]。
基于之前的理论研究,本文超弹性软管失稳实验控制系统选用S7-200PLC为核心控制器,采用STEP7-Micro/WIN编辑软件和MCGS组态软件进行混合编程,分别对实验中的程序和状态进行监控。超弹性软管失稳实验控制系统对环境温度的控制和多个回路的设计模拟人体体温下多条血管,通过对超弹性软管膨胀过程研究模拟生物工程中脑肿瘤生长机理。超弹性软管失稳实验控制系统控制逻辑严谨、易于操作、成本低、功能齐全,可满足各种实验要求,人机交互界面简洁易懂,数据能快速采集与存储,便于实验的进一步研究,超弹性软管失稳实验控制系统将在研究生物工程学、医学等多个学科上具有重要的社会效益。
1 系统整体结构
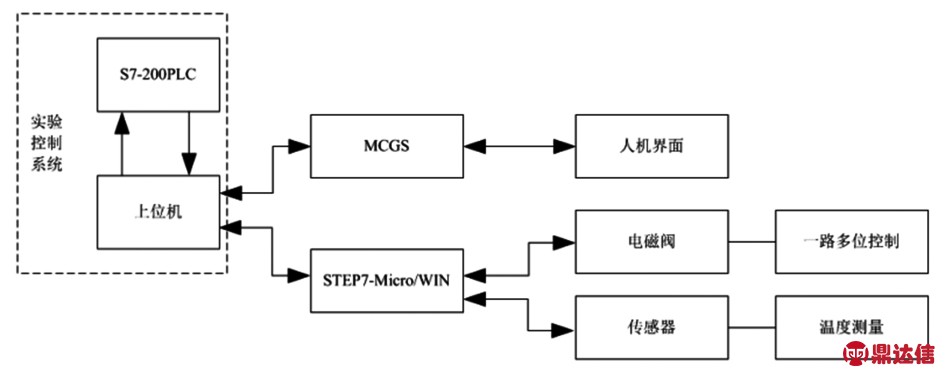
图1 超弹性软管失稳实验控制系统结构框图
如图1所示为超弹性软管失稳实验控制系统结构框图。超弹性软管失稳实验控制系统由核心控制元件PLC和上位机组成。PLC进行实验的逻辑控制、数据处理、模拟量调节以及与上位机联网通信;上位机由进行程序监控的编程软件和对实验控制状态监控的组态软件组成,上位机中的两种软件通过PC/PPI电缆形成互通互用、数据共享,接口方式采用9针RS-485信号接口。实验控制系统选用CPU为224XP的PLC为控制元件,包括多个信号输入输出点。PLC系列扩展接口是总线形式,可以配接开关量I/O单元,也可配接模拟量I/O单元。超弹性软管失稳实验控制系统为完成多种实验扩展了数字量EM222模块用于多位电磁阀控制;模拟量EM231模块对实验室环境温度进行采集;数字量EM223模块用于完成实验中其他开关量的控制。人机交互界面通过MCGS组态软件设计对实验进行控制和监控[2-3]。超弹性软管失稳实验台与控制柜如图2所示,MCGS组态人机交互界面如图3所示。

图2 超弹性软管失稳实验台与控制柜

图3 MCGS组态人机交互界面
2 多位同步控制设计
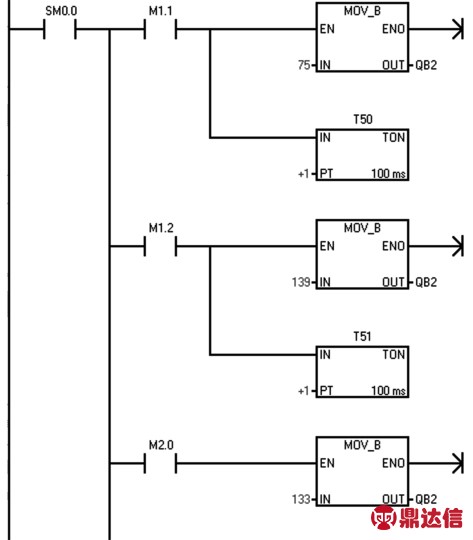
图4 多路同步控制程序
1)多位同步控制系统原理。多位同步控制是根据PLC数据存储寻址特点,提出了一路多位电磁阀同时完成开或关状态切换的控制策略。在PLC数字量输出映像区Q中选取地址如QB2,表示输出第2个字节,一个字节中包含8个二进制位。在实验中,一个位代表一个电磁阀,8个位置通过0和1的变化实现电磁阀开或关状态的转换,例如在程序中输入十进制75转换成二进制01001011,代表1、2、4、7位置上的电磁阀同时打开。将不同的十进制数字转换成对应的二进制数形成多路控制进而模拟人体的多条血管。
2)多位同步控制程序设计。部分多位同步控制在STEP7-Micro/WIN编程软件上通过运用字节传送指令进行多路控制。多路同步控制程序如图4所示。
3)多位同步控制组态设计。多位同步控制人机交互界面如图5所示,超弹性软管失稳实验控制系统多支路模拟人体多条血管。组态软件中数据对象值操作地址与编程软件中数据存储地址是对应的。例如在实验中按下图6中按钮[1.1],按钮对应的数据对象值操作地址“M11”与编程软件数据存储地址“M1.1”完成通信,地址“M1.1”状态改写为[ON],程序中:
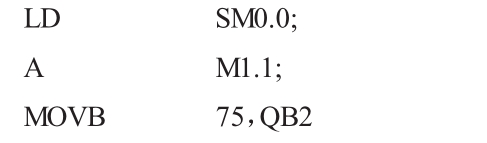
导通,实验中模拟各器官1号、2号、4号、7号位置上的电磁阀同时打开,模拟人体其中一条血管流通,实验中1.1路4个电磁阀同时打开完成线路的导通,如图7所示。
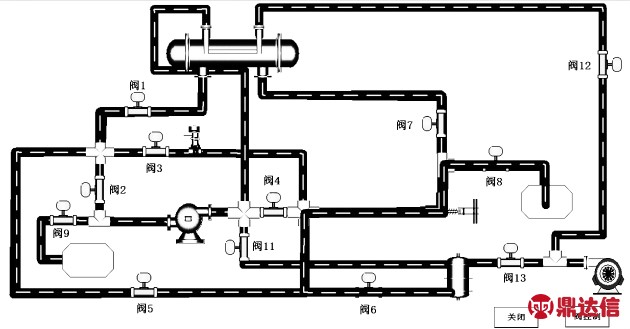
图5 实验控制多路流通示意图
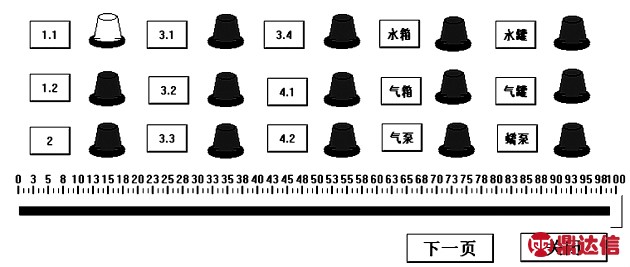
图6 多路实验控制
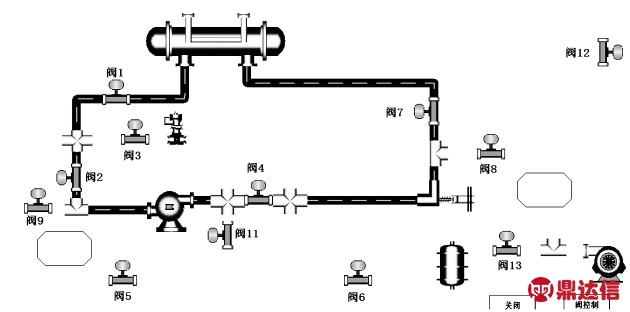
图7 1.1路导通示意图
3 温度矢量控制设计
1)温度矢量控制系统原理。超弹性软管失稳实验控制系统选用温度传感器采集实验中的温度进行控制,用来模拟人体多种情况下的体温。温度传感器采集数据,通过数据线传输到模拟量EM231模块,经处理后的结果传输到人机交互界面上实现数据的监控,并为进一步模拟多种环境下人体体温提供条件。实验控制中EM231模块连接一个带4~20 mA变送输出的温度传感器,量程为0~50℃,即0℃输出4 mA,模块转换数字量为AIW=6400;50℃输出20 mA,模块转换数字量为AIW=32 000[3]。根据模拟量转换公式推导,T与AIW关系曲线图如图8所示。

图8 传感器T与AIW关系曲线图
通过三角形相似定理可知ΔABM~ΔCDM,故可列:
由图8可知:AB=50;CD=TXBM=32 000-6400;DM=AIWX-6400代入公式(1)中可得:
传感器通过检测环境温度得到AIWX数据传输到模拟量模块中,经公式(2)计算出此时环境温度,温度数据传输到MCGS组态软件中进行温度的监控[5]。
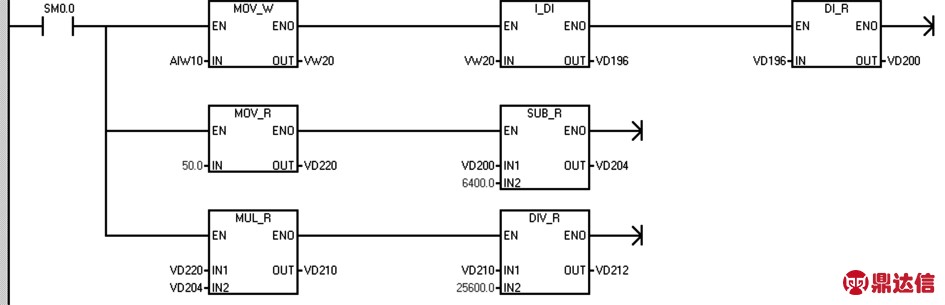
图9 温度矢量PLC程序编程
2)温度矢量控制系统程序设计。部分温度矢量程序设计在STEP7-Micro/WIN编程软件上运用传送和运算指令进行温度矢量的计算。温度矢量PLC程序编程如图9所示。
3)温度矢量控制组态设计。在组态软件上温度表格数据和曲线对应的表达式和属性地址[VD212]与编程软件存储地址[VD212]是对应的,即温度传感器对数据采集并经PLC处理后通过PC/PPI电缆传输到人机界面上。实验数据报表如表1所示。
表1 实验数据报表
4 结语
超弹性软管失稳实验控制系统通过一路多位同步控制设计理念模拟人体多个血管,温度的控制可以模拟人在不同环境下人体体温,可以为研究脑肿瘤在不同体温下生长机理提供必要的环境。超弹性软管失稳实验控制系统可以实现一台多步项目的研究,即可以实现对弹性软管材料在失稳实验下的拉力、压力、起鼓时的形貌等多个方向上的研究。


