
摘要:社会快速发展对于汽车电子方面的需求也逐渐增加,本文主要对智能车及其硬件结构进行了简单的介绍,并对摇头舵机以及应用原理与控制方法进行介绍。希望智能车系统能够再进一步的优化,光电传感技术也进一步的促进了其发展。
关键词:智能车;光电传感器技术;优化控制
0 前言
随着社会的进步,对于汽车电子方面的探究也逐渐增多。对于轮式移动机器人的研究显得异常火热,其简称为智能车。该项系统能够对周围环境有一定的感知、作一些相应的决策规划以及有自动驾驶等一系列功能。智能车运用了多个领域的知识如:计算机、自动控制、机械等。社会的发展越来越需要高科技来支撑,因此,智能车在人们的平时生活以及企业的生产中占据了重要地位,近些年我们可以看到在道路上、物流中、甚至柔性制造系统中智能车已经被熟练地运用在其中,其已经成为研究领域的重要研究项目。
就现在来看,智能车已经可以在有标记的路上为驾驶员进行辅助甚至可以无人驾驶,这些智能车常常依据识别特殊的标记来完成,经过系统判断和模仿技能来完成驾驶操作。智能车即为一种可以自行导动的车,在规定区域内沿设定轨迹前进。在运动过程中主要由电机驱动系统和方向系统进行控制。以黑色线作为引导线,白色则作为地面颜色。该车的驱动应用的是直流电机,并采取PWM已达到电机的调速。为了实现速度快、行进平稳的目标,需要将识别路径、转向时电机的控制等操作系统精准的组合到一起。
1 硬件的结构
该车硬件主要由:供电电路、光电传感、转向和摇头舵机等一系列系统组合而成,如图1所示。
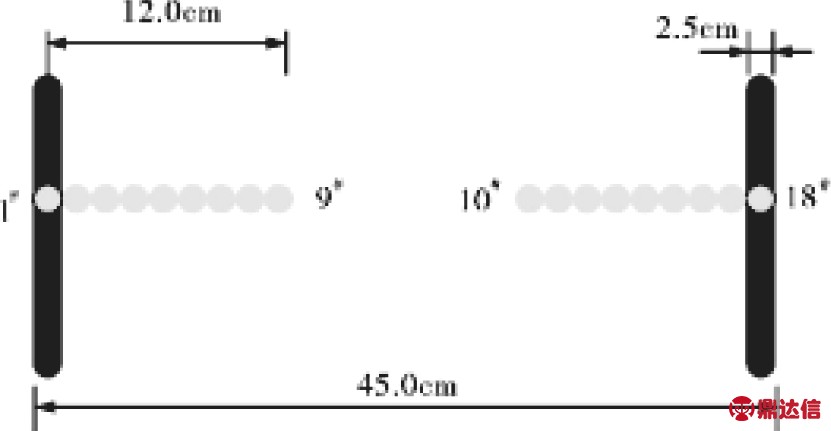
图1
■1.1 飞思卡尔单片机
型号为9S12XS128的单片机为飞思卡尔公司研发设计的一款16位车用的单片机,CPU12内核的特点为:系统处理速度迅速、总频可达到80MHz、硬件资源充足等特点,在此基础上研制了该单片机。
■1.2 光电传感器
该传感器由无数个5mW的激光管组成,其是智能车获取相道路信息的通道。该传感器在激光管射出电路中增加了调制电路,接收管只能接收到调制后的光信号,以防可见光对其电路的影响。智能车选择了双排的激光管来获得信息,有一排安置在车身上,用直线排布,与前轮轮轴距离50mm左右,两个激光管之间的距离为20mm左右。另一排则和摇头舵机连接,由该舵机控制,控制范围在以舵头为圆心,直径为90cm的圆弧,每个激光管之间的距离大约为20mm左右。因此,需要设定黑线的宽度为25mm,这样可以保证两排激光管中至少会有一个检测到黑线的位置。
■1.3 电机驱动
作为为智能车提供驱动力的电机,其性能直接影响了车的速度响应。电机的驱动芯片应用的是飞凌公司的BTS7960,它是大电流的集成芯片,电流最高可达到43A,控制信号能到达25kHz,为了得到更大的驱动力,车内应用了两个芯片,以达到更快速的目的。
2 摇头舵机
此舵机采用的是Futaba公司的产品,S3010数字舵机来促使激光管追踪黑线的路径,因为响应速度有一定的限制,单片机发送信号后舵机不能立刻将信号消息处理转化为指定的角度,所以还要加配一个旋转角传感器来辅助舵机完成角度的转换,单片机通过旋转角传感器来获得当前的角度并根据PWM信号来综合确定下一刻舵机的脉宽值。
3 识别原理和实现方法
■3.1 收集路径的办法
收集路径的信息可以用3个发射管来给一个接收管发送信号,总共需要用18个激光管与6个接收管,按照所需要的排列方法总共分为8组。可以使用单片机的PIT定时中断功能来达到每组激光的发射和接受的目的。设计可以采取每隔一定时间点亮一组激光管,在2ms左右完成或取赛道信息的任务。例如,智能车以3.5m/s的驾驶速度行进,在2毫秒内车可以行进7mm,完全符合道路上频率的要求。
图2
如图2所示,道路两侧和中间位置由KT板组合而成,将两侧的光点从左边开始设为1~18,再对激光的初始发射位置进行稍微的调整,目的在于使这些光点都可以准确的落在黑色胶带上面,并且所有的光点为一字型排列。规定,当激光射到黑色线上时信息为“1”,反之,射到白色赛道时信息为“0”。这样在整个程序中就会形成几十组历史光点信息的数组。系统可以通过对几十组数据的及时分析,做出相应的调整并规定出后续控制方法。除此之外,可以使用系统程序来屏蔽掉没有用的信息光点,从而提升小车的自动行驶导航的性能。
■3.2 舵机控制
智能车的行驶方向主要靠转向舵机来完成,该舵机控制算法主要由两部分共同完成∶首先,应该先计算出摇头舵机脉宽和中心脉宽的偏差是多少,记做E,而后将E乘以分段的系数。在规定分段系数时要知道当E较小时系数也应该偏小,这是为了预防小车在道路上晃动幅度大,当E较大时,表示小车正处于转弯中,应提升系数,帮助小车顺利通过弯道。其次,及时检验道路上的光点所对的转向值,保障转向舵机快速响应,使赛道信息可以在第一时间反馈给转向舵机,便于及时的进行调控,使得转弯更加流利。
将以上两部分进行相加,在加上转向舵机中心脉宽数值,对舵机进行控制。小车过弯的路线与多个参数有关,因此每个设置都应精确计算。
■3.3 直流电机
小车的速度采用PID算法进行控制,实际速度的推算需要使用编码器进行精确测算。将原规定速度和小车实际速速相减得到的差值,在运用PID算法将偏差消除。可以采取分段控制的办法,并且对电机转动速度的占空比进行一定的处理。目的在于保证小车系统快速性与稳定性。
对于速度控制可以采取分段控制来实现:当设定的速度比实际速度大时,应该用比较大的PWM占空比来控制电机,使小车的速度适当提高一些;当设定速度小于实际速度时,可以采取开环控制的方法,使智能车速度快速的减速到设定值;当设定值远小于实际值时,就可以利用电机反转的办法使其速度降低。使用此方法后,可以在较短时间内实现智能车的增减速,既有快速的跟踪速率,也没出现大的浮动。
4 结束语
将激光发射和接收管作为道路的主要传感系统是智能车的系统方式,根据激光管的分时段发射和接收信号,利用转向舵机与摇头舵机的算法可以有效控制智能车行驶路径和对其的追踪功能。对于速度的把握上,应结合道路信息与编码器反应的数值,变换单片机的输出信号占空比,快速的实现小车的加减速,目的在于使小车以平稳的速度行进。对于进一步的优化还在研究中,希望可以为探究者提供一些参考。


