
【摘要】 阐述了一种气动柔性驱动器(FPA),及采用FPA驱动的气动柔性灵巧手(ZJUT Hand)。以ZJUT Hand为研究对象,基于微分运动学理论,建立其手指的静力学模型,完成了手指静力跟踪的半闭环控制实验,验证了ZJUT Hand手指便于控制输出力的特点;基于指尖五维力传感器,提出了一种模糊自适应指尖力动态跟踪控制策略,完成了手指指尖力动态跟踪实验,结果表明:该控制策略能够在未知环境下,实现对手指指尖力快速、精确的动态跟踪,响应时间约为1 s,跟踪误差稳定在±0.15 N内。
关键词:气动柔性灵巧手 气动柔性驱动器 手指静力模型 模糊手指力 跟踪控制
引言
多指灵巧手指尖输出力的精确程度,直接决定了灵巧手能否对目标物体实现稳定抓取。实现稳定抓取,可以看作是灵巧手多个手指与目标物体之间存在一组力约束的多机器人系统。目前,刚性机器人多指灵巧手[1~5]由于自身柔性差,在操作控制中所面临的主要问题是[6]:灵巧手在约束环境中对输出作用力柔性的高要求,与在自由空间中对位置伺服刚度和机械结构刚度的高要求之间的矛盾。目前解决这一矛盾的主要方法是通过采用阻抗控制等策略使得多指灵巧手指尖输出力具有一定的主动柔顺性,对接触环境有一定的顺从能力,存在的缺点是控制算法较复杂,实现困难。对于一些采用气动柔性驱动器(如 PMA、FPA 及 FMA[7~10]等)驱动的机器人多指灵巧手(简称气动柔性灵巧手),由于驱动器本身主要由橡胶构成,同时空气具有可压缩性,故气动柔性灵巧手具有非常好的被动柔性,对抓取对象有一定的被动顺从能力。对于农业采摘机器人,由于采摘对象具有嫩、脆及易损伤等特点,要求机器人的末端执行器具有较好的柔顺性,因此气动柔性灵巧手可以广泛应用于农业采摘机器人中。
本文研究采用气动柔性驱动器 FPA[11~12]驱动的气动柔性灵巧手(简称ZJUT Hand)的输出力控制技术,提出一种模糊自适应指尖力跟踪控制策略,实现在未知环境下手指指尖力精确跟踪的同时,尽量减少指尖对环境的冲击作用。
1 气动柔性驱动器及ZJUT Hand
本文提出一种气动柔性驱动器(简称FPA),其结构原理及实物照片如图1所示。FPA主要是由橡胶管、螺旋弹簧、两个端盖以及管接头组成(图1a)。其中,螺旋弹簧密绕内嵌在橡胶管的管壁中;两个端盖与橡胶管用胶水密封连接,防止气体泄漏,可在端盖与橡胶管接头处装卡箍(图1b);管接头与其中一个端盖通过螺纹连接,压缩空气可以通过管接头进入FPA内腔。
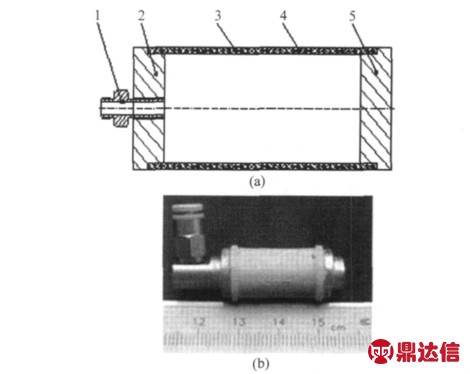
图1 气动柔性驱动器
Fig.1 Flexible pneumatic actuator
(a)结构图 (b)实物照片
1.管接头 2、5.端盖 3.橡胶管 4.螺旋弹簧
FPA的工作原理如下:压缩空气通过管接头进入FPA内腔,在气体压力的作用下,橡胶管发生变形,同时由于螺旋弹簧的径向限制作用,FPA只能产生轴向伸长;当减小气体压力,FPA在橡胶管与弹簧的回弹力的作用下,恢复原状;可以通过调节FPA内腔气体压力,进而控制FPA的轴向伸长量。整个过程即是 FPA 的驱动过程[11~15]。
在FPA的研究基础上,提出了基于FPA的弯曲关节[16]、侧摆关节[17],并最终研制了具有 5 个手指、20 个自由度的 ZJUT Hand[18],如图 2 所示,结构参数如表1所示。ZJUT Hand的每个手指指尖设置有五维力传感器,每个关节上配置有AS5045型非接触式角度传感器。

图2 ZJUT Hand原型
Fig.2 Prototype of ZJUT Hand
(a)3-D效果图 (b)实物照片(配置传感器)
2 ZJUT Hand手指静力学模型
ZJUT Hand采用模块化设计理念,5个手指的结构完全相同,分别由3个弯曲关节和1个侧摆关节组成,4个关节均采用FPA直接驱动,如图3所示。手指的D-H连杆坐标系如图4所示,其中,坐标系x0y0z0为基坐标系。
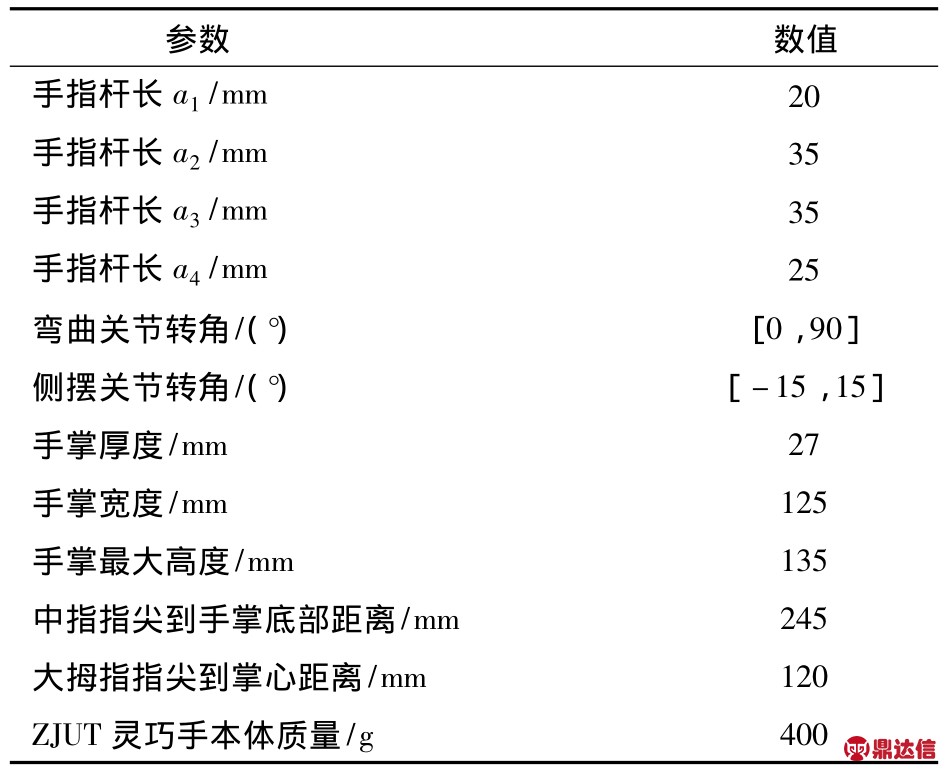
表1 ZJUT Hand本体结构参数
Tab.1 Structural parameters of ZJUT Hand
应用手指静力学模型主要研究:灵巧手手指与环境接触后,受到环境约束处于静平衡状态时,手指指尖和环境的接触力与手指各个关节力矩之间的映射关系。
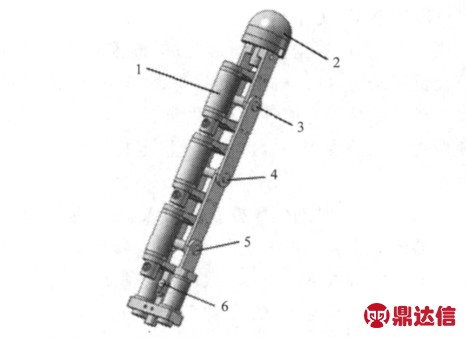
图3 手指的本体结构
Fig.3 Structure of finger
1.FPA 2.指尖 3.弯曲关节I4.弯曲关节II 5.弯曲关节III6.侧摆关节
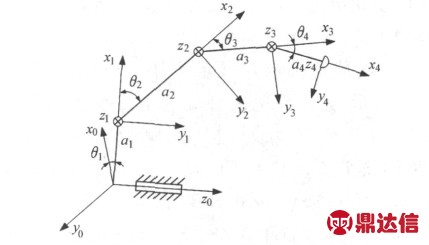
图4 ZJUT灵巧手手指的连杆坐标系
Fig.4 link model of ZJUT Hand’s fingers
手指指尖与环境接触力4![]()
![]() 相对于指尖坐标系x4y4z4(与指尖传感器坐标系重合)而言,由于构成手指的弯曲关节和侧摆关节只能实现弯曲和侧摆运动,不能实现扭转运动,故指尖力4F的分力矩4mx一般为零,所以指尖选择五维力传感器。根据机器人学理论,手指静力学与微分运动学存在严格的一一对应关系,可以根据微分运动学直接建立手指接触力的静力学模型[19]为
相对于指尖坐标系x4y4z4(与指尖传感器坐标系重合)而言,由于构成手指的弯曲关节和侧摆关节只能实现弯曲和侧摆运动,不能实现扭转运动,故指尖力4F的分力矩4mx一般为零,所以指尖选择五维力传感器。根据机器人学理论,手指静力学与微分运动学存在严格的一一对应关系,可以根据微分运动学直接建立手指接触力的静力学模型[19]为
其中![]()
式中 4J——相对于指尖坐标系的雅可比矩阵
τ——用于抵消手指接触力4F,手指各关节的输出力矩
根据机器人学理论[19],计算得
其中![]()
手指指尖输出静力与各关节FPA内腔压力的映射关系为
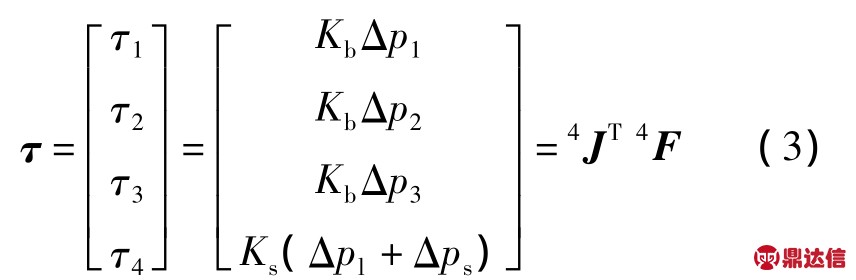
式中 Δp1、Δp2、Δp3——3 个弯曲关节的 FPA 内腔压力增量,MPa
Δpl、Δps——侧摆关节长短2个 FPA 内腔压力增减量,MPa
Kb、Ks——弯曲关节和侧摆关节的结构参数
3 ZJUT Hand手指输出力动态跟踪策略
多指灵巧手的抓取过程往往是一个与环境接触动态非良好的过程,多数情况下灵巧手或者操作者对环境位置(指尖与目标物体接触初始位置)的估计不够精确,即灵巧手在未知环境中抓取或操作目标物体。因此,除了上述的手指静力学问题,多数情况是期望在未知环境中,手指同时满足位置与力的某种理想的动态关系,同时希望手指与环境的接触力保持恒定的期望值。
3.1 手指与环境等效模型
手指与环境接触的情况,如图5所示,接触引起的环境局部微小变形量由XE表示。
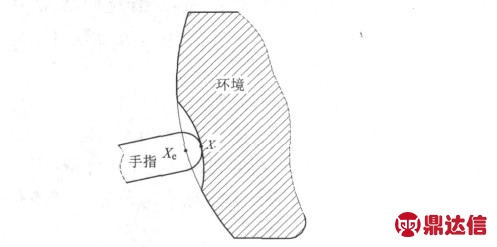
图5 手指与环境接触模型
Fig.5 Contact model of finger and environment
手指指尖与环境的接触力可由弹性力来模拟,即
式中 Xe——环境位置,mm
X——手指实际位置,mm
Ke——环境刚度系数,N/mm
根据式(1),手指与环境接触系统可简化为一个质量-弹簧系统[20~21],假设已知环境位置及环境刚度系数,指尖实际位置可以通过关节位置传感器得到,从而可以精确计算得到手指与环境实际接触力。但在实际操作过程中,由于各种不可预知的因素,灵巧手及操作者很难精确了解环境刚度系数Ke及环境表面位置Xe,这导致了手指力控制存在误差,无法在要求高精密输出力的场合使用。
3.2 自适应指尖力跟踪算法
机器人多指灵巧手对目标物体实施抓取或操作时,可以从2个运动空间考虑:自由运动空间和接触空间(环境约束空间)。自由运动空间:手指从初始位置运动至与环境接触,整个运动过程,手指与环境的接触力F=0。接触空间:指尖从与环境接触开始运动至相对静止状态,整个过程手指与环境的接触力F从小变大。
提出的在未知环境下自适应指尖力跟踪控制算法的核心思想是:根据指尖力传感器的反馈信息,自适应调整指尖参考位置Xr,从而逐步间接逼近期望的参考力Fr。具体实施过程如下:首先,以环境位置Xe为目标参考位置,手指从指尖初始位置运动至与环境位置接触;接着,指尖继续运动,与环境接触力逐渐增大,根据指尖力传感器的力反馈信息,手指不断调整目标参考位置,逐步逼近期望指尖力。在未知环境中,很难精确知道环境位置Xe,假设环境位置估计X'e与环境实际位置Xe之间存在偏差ζ=Xe-X'e,用环境位置估计X'e作为算法初始目标参考位置,同时算法中不涉及环境刚度。因此,可以消除未知环境带来的影响。
由于指尖力F在各力的分量是可以解耦的[22],为了表达清楚,可以只考虑某一维操作空间情况,用xe、x'e、xr、fr代替 Xe、X'e、Xr、Fr,指尖参考位置自适应调整算法为
式中 xr(t)——t时刻指尖目标参考位置,mm
 ——t=0时刻指尖目标参考位置为环境位置估计,mm
——t=0时刻指尖目标参考位置为环境位置估计,mm
T——算法控制周期,s
x(t-T)——t-T时刻指尖实际位置,mm
δ(t)——t时刻指尖目标参考位置补偿算子,mm
fr——期望目标参考力,N
f(t-T)——t-T时刻手指与环境实际接触力,由指尖力传感器检测通过坐标转换得到,N
η(t)——比例因子,mm/N
3.3 参考位置补偿算子模糊自整定
采用模糊控制对指尖目标参考位置补偿算子δ(t)进行整定,实际上是对比例因子η(t)实施在线模糊自整定,即根据输入量,经过模糊控制器实时调节比例因子η(t),进而改变目标参考位置,使得指尖与环境的接触力能够快速、平滑、零超调跟踪期望参考力。比例因子η(t)模糊自整定控制器设计步骤如下:
(1)确定t时刻模糊控制器输入、输出量。模糊控制器的2个输入量:力的误差值fe(t),即目标参考力fr与实际接触力f(t-T)的差值fe(t)=frf(t-T);实际接触力的变化率 fec(t),fec(t)=![]() ,输出量为比例因子 η(t)。
,输出量为比例因子 η(t)。
(2)确定输入量及输出量的变化范围、论域范围及尺度变换。根据期望参考力,确定输入、输出量的实际变化范围,并经过尺度变换变换到相应的论域范围内。
(3)论域范围内定义各个语言变量的模糊子集。输入量fe、fec及输出量η的语言变量名称定义为FE、FEC及 H,相对应的模糊子集为 T(FE)、T(FEC)及T(H),其中:T(FE)={NB(负大),NS(负小),ZE(零),PS(正小),PB(正大)},T(FEC)={NB(负大),BS(负小),ZE(零),PS(正小),PB(正大)},T(H)={NB(负大),BS(负小),ZE(零),PS(正小),PB(正大)}。模糊集合的隶属度函数,均采用正态分布函数。
(4)确定模糊控制规则。输出量比例因子η(t)的调整原则为:力的误差fe为期望参考力,及实际接触力变化率fec不变时,手指处于自由运动状态,指尖不与环境接触,此时应当保持比例因子η偏大,增大参考位置补偿算子δ,以便手指指尖迅速与环境接触;当力的误差fe较大,同时实际接触力变化率fec较小时,此时也应当增大参考位置补偿算子δ,保持比例因子η偏大;当力的误差fe较大,同时实际接触力变化率fec较大时,此时应保持比例因子η适中,可以较快地跟踪期望参考力同时避免力的超调;当力的误差fe较小,同时实际接触力变化率fec较大时,应当保持比例因子η偏小,避免指尖与环境发生接触力过大超调的情况;当力的误差fe较小,同时实际接触力变化率fec较小时,应当保持比例因子η偏小或适中,使得指尖与环境的接触力逐渐逼近期望参考力。根据上述分析,可得到输入为FE及FEC,输出为H的模糊控制规则,如表2所示。
(5)输出量去模糊处理。根据上述模糊控制规则进行近似推理,得到输出量的模糊值,需要将这些模糊量进行清晰化,即去模糊处理。本文采用加权平均法对输出量解模糊,得到清晰化的输出量
表2 输出为H的模糊控制规则
Tab.2 Fuzzy control rules of output H

式中 zi——控制器输出量H的第i个等级
h(zi)——H 对应 zi的隶属度
3.4 指尖力模糊自适应跟踪控制器设计
根据上述分析,设计未知环境下手指指尖力模糊自适应跟踪控制器结构如图6所示。图6中,手指与环境的接触力通过指尖五维力传感器测量,反馈得到的力经过坐标变换与期望接触力Fr相减,得到接触力误差Fe乘以比例因子η,与指尖实际位置X相加得到指尖下一控制周期的参考位置Xr,比例因子η通过上节提出的模糊自整定控制器在线调节;参考位置Xr经过手指逆运动学L-1(Xr)求解得到期望参考关节角度Θr,与关节角度传感器检测的实际角度Θ相减,其差值作为手指位置控制器的输入,手指的位置控制采用关节角度与FPA内腔气压双闭环的控制策略。该控制器包含了手指位置控制环,其力跟踪控制精度很大程度上取决于手指位置控制精度。
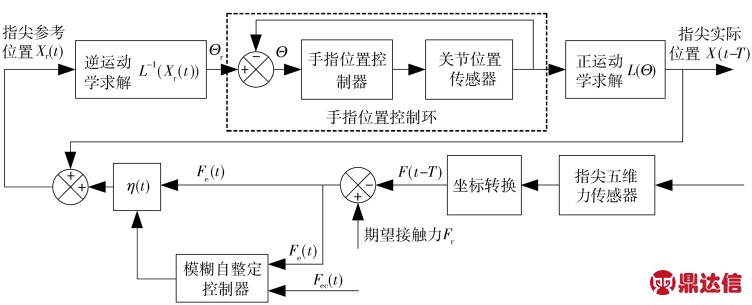
图6 未知环境下指尖力模糊自适应跟踪控制器
Fig.6 Finger tip force fuzzy adaptive tracking controller under unknown environment
4 ZJUT Hand手指输出力实验
4.1 手指静力半闭环控制实验
手指与目标物体接触力的具体维数与接触模型有关[23~24]。不考虑z方向的受力情况,指尖与目标物体接触的情况,如图7所示,当接触模型及指尖位姿确定后,不同的接触点1、2在接触力F1和F2大小相同情况下,对应到坐标轴的力的分量并不相同,由此可见,接触力元素的大小除了取决于接触力的大小,而且还取决于接触点位置。为了更准确、直观地研究手指的输出力特性,实验过程中将接触点(刚性约束点)的法线方向与坐标轴x4重合,即研究指尖接触力4F中4fx的分量情况。
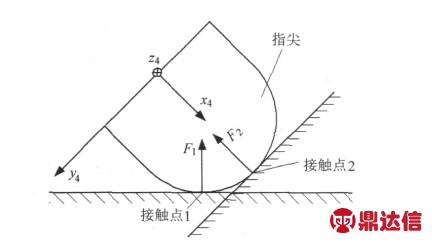
图7 手指与目标物体接触简化示意图
Fig.7 Diagram of finger contacting with target object
忽略摩擦力矩影响,手指半闭环静力控制原理如下:在直角坐标空间下,当手指各关节实际角度为Θ,刚性约束手指指尖位置;给定手指指尖相对于指尖坐标系的目标输出力4Fr;接着由式(3)计算得到相对应的手指各关节目标输出力矩τr,同时可得手指各关节FPA的内腔气体压力的目标增量Δpr,对各FPA内腔压力进行闭环控制;最后由指尖五维力传感器跟踪得到手指指尖的实际输出力4F,其控制原理结构框图如图8所示。根据图8,设计手指位置控制实验原理图如图9所示,并搭建实验系统平台,如图10所示。
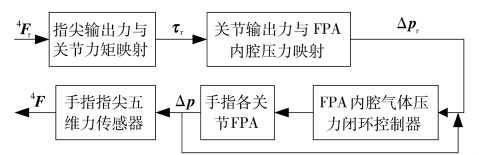
图8 手指指尖输出力控制原理结构框图
Fig.8 Diagram of fingertip force control
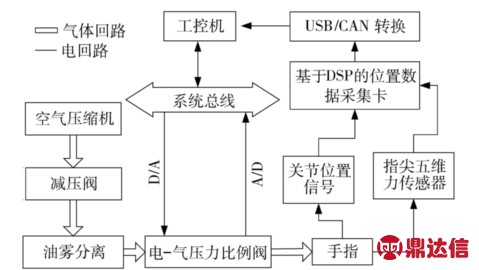
图9 手指指尖输出力控制实验原理图
Fig.9 Schematic diagram of experimental system for fingertip force control
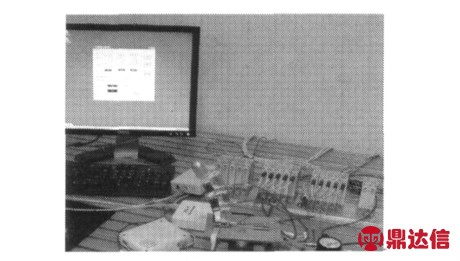
图10 手指位置控制实验平台
Fig.10 Position control experimental platform of finger
根据上述手指指尖半闭环输出力控制原理,搭建实验平台。实验过程中,当手指各个关节角度Θ =[5°30°30°30°]时,刚性约束固定手指指尖。给定手指指尖在直角坐标下的输出力轨迹如下:![]()
![]()
![]() 手指指尖每到一个状态的控制周期为2 s,然后接着到下一个参考点,手指静力半闭环跟踪实验结果如图11所示。
手指指尖每到一个状态的控制周期为2 s,然后接着到下一个参考点,手指静力半闭环跟踪实验结果如图11所示。
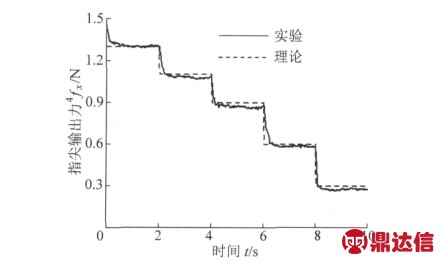
图11 手指静力半闭环实验跟踪结果
Fig.11 Semi-closed loop experimental results
由手指静力半闭环控制实验可得:
(1)手指静力跟踪响应较快,不同控制状态的稳态时间在0.3 s内,这主要是由于手指静力输出时,关节FPA的内腔体积基本不变,手指静力响应时间主要取决于电-气比例阀(动态响应时间约为0.1 s)的调节速度。
(2)手指静力半闭环跟踪实验的不同控制状态的稳态误差在[-0.1,0.38]N范围内,且指尖目标输出力fxr在大于2 N时,手指实际输出力均大于目标输出力,原因在于理论分析中忽略了FPA内腔的径向膨胀,认为FPA内腔气压作用面积恒定,实验中对FPA内腔气压做闭环控制,然而随着指尖目标输出力的增大,相应的关节输出力矩增大,即关节FPA内腔气压不断增大,使得FPA内腔径向膨胀,导致气压的作用面积增大,关节的实际输出力矩偏大,进而使得手指实际输出力大于目标值。
(3)指尖五维力传感器的反馈信息显示:实验中除了fx的分量,其他2个力的分量存在小幅度(-0.3 N~0.3 N)的扰动,主要原因是传感器各个分量之间存在相互耦合关系。
(4)手指各个关节采用FPA直接驱动,关节力矩直接输出,具有输出静力易于控制的优点。
4.2 指尖力模糊自适应跟踪实验
建立如图12所示的指尖力动态跟踪实验方案,并在图10所示的实验系统上,验证上述提出的模糊自适应指尖力跟踪控制策略的有效性。
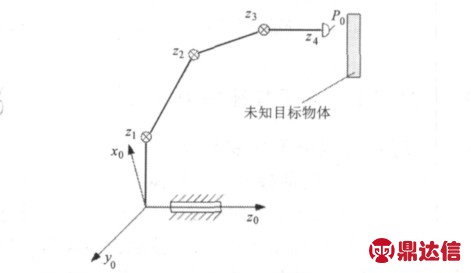
图12 手指自适应指尖力跟踪控制实验方案
Fig.12 Experimental program of adaptive fingertip force tracking for finger
如图12所示,指尖从初始位置P0[80 15 60]沿基座标系z0方向向未知目标物体(为了验证算法的自适应性,实验中采用刚度较小的泡沫材料作为目标物体,其位置及刚度未知)作直线移动,假定期望的目标接触力保持fz=12 N(相对于基座标系),初始的环境位置估计x'e为P'[80 15 66],算法控制周期T=0.05 s,未知目标物体位置大约在Pzr=80 mm处,实验结果如图13所示。
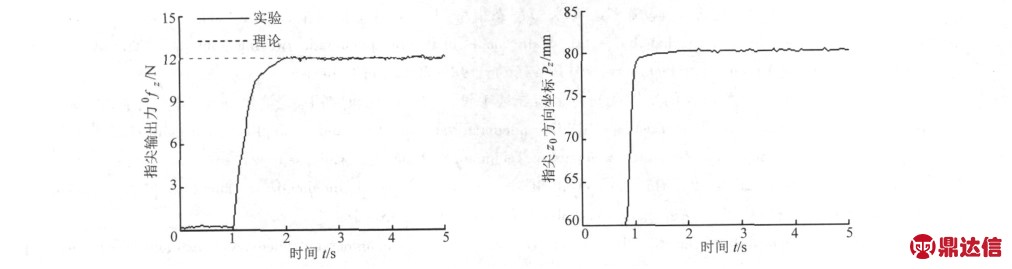
图13 未知环境下手指自适应指尖力动态跟踪实验结果
Fig.13 Experimental results of adaptive fingertip force tracking under unknown environment
从图13中可以看到:自由运动空间中,根据指尖力传感器的反馈信息,算法适当增大参考位置补偿算子δ(t),使得指尖位置快速逼近未知目标物体,因为指尖力传感器噪声的存在,实际目标接触力约为0;接触空间中,由于手指的被动柔性和指尖参考位置的在线模糊自整定,指尖与目标物体接触的初始阶段,没有发生明显的抖动和力的超调现象;指尖与目标物体接触后能够快速、平滑的到达期望的接触力,稳态误差在±0.15 N内,并且指尖z0方向坐标稳定在80 mm左右处,达到期望的接触力的稳态时间约为1 s。实验结果表明:本文提出的模糊自适应指尖力跟踪算法,能够消除未知环境的影响,能够快速、有效、平滑的动态跟踪期望的接触力,具有良好的控制效果。
5 结论
(1)基于气动柔性驱动器,提出了一种气动柔性灵巧手(ZJUT Hand),该手具有5个手指、20个自由度。
(2)建立了ZJUT Hand手指的静力学模型,搭建了实验平台,完成了手指静力的半闭环控制实验,实验结果验证了ZJUT Hand手输出力便于控制的优点,其静力动态响应时间约为0.3 s,半闭环控制的稳态误差在[-0.1,0.38]N范围内。
(3)基于设置在ZJUT Hand手指指尖上的五维力传感器的力反馈信息,提出了一种模糊自适应指尖力动态跟踪控制策略。实验结果表明:该控制策略能够在未知环境下,实现手指指尖力的动态跟踪,动态响应时间为约1 s,跟踪误差稳定在±0.15 N内。


