
摘 要:洗盘机已经广泛进入人们的生活之中,从而使得人们能够从繁杂的劳动中逐步解放出来。本作品从理论及实物模型的基础上, 提出了一种自动化洗餐盘的设计方法, 产品主要AVRmega16 微控制器进行电气控制,并使用了矩阵键盘行输入操作,同时有液晶屏幕提示清洗的状况。 机器工作时,只需要将餐盘放入装置内部,按下装置工作按键时,餐盘清洗机开始工作,通过空压机、真空发生器、电池阀、吸盘的相互配合,实现将餐盘的整体放入进行单个分开清洗。通过毛刷,高压水枪将餐盘清洗干净,最后将清洗好的餐盘放到降餐盘装置上,实现餐盘自动摆好的功能,与此同时由高能紫外线灯进行消毒。 最后当所有的餐盘洗完后,提醒装置提醒工作人员拿走餐盘。 同时本产品制作成本低廉,可用于大中型学校食堂和企业餐厅。
关键词:自动化;餐盘清洗机;清洗
1 引言
1.1 研究背景及意义
随着社会的进步,餐饮业发展很快,餐厅越来越一体化。 而餐厅工作人员的工作量也越来越大,直接导致吃饭时的饭盘不能及时洗刷出来使用, 极大的影响人们的就餐。 自动洗盘机改变以往传统洗碗机不能大量自动高效清洗餐盘的弊端,通过机械原理单片机控制,实现智能无需人力,达到自动、高效的清洗餐盘的目的。
1.2 研究现状分析
1.2.1 随着数字信息电脑的普及, 洗盘机已经广泛的进入人们的生活, 从而使人们从繁杂的劳动中解放出来,作为一种自动化设备,餐盘清洗机一般要实现自动注水。 自动加洗涤剂,自动排水,以及定时故障报警的功能。
1.2.2 市场现在主要有两种餐盘清洗机,一种是锈钢餐盘清洗机,但这种清洗机只能对餐盘进行精洗,即只能洗先粗洗过的餐具;另一种是喷淋式清洗机,即采用高压可空转马达配合喷淋,喷射力度大,表面清洗效果明显[1]。因此我们在此基础上设计了新型自动喷淋式餐盘清洗机。
2.1 外部框架设计
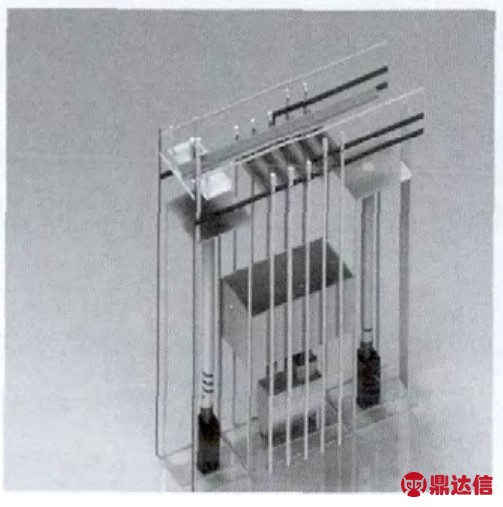
图1 整体结构图
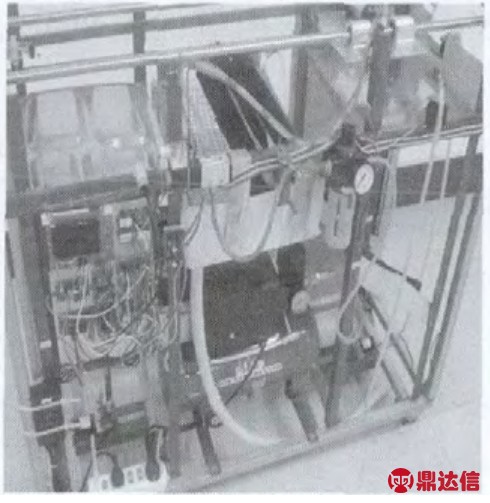
图2 实物模型内部结构
作品外部框架由金属材料焊接而成(如图1 和图2,整体结构图)[2]:
框架有4 个金属支撑柱, 框架上下分别由金属圆柱和金属平面焊接而成, 这样就使得框架形成一个六面的立方体。 框架上方为上面,固定有屏幕的一侧为正面,其后方为后面,其他两个面为侧面。
2.1.1 框架上面部分:
2.1.1.1 框架的上面有两根光滑的金属光轴,金属光轴分别与侧面链接,每根光轴上有两个滑动轴承。
2.1.1.2 滑动轴承下面用螺丝固定着抓板,抓板的下方有吸盘,抓板的上方固定着电机,电机的主轴固定着一个齿轮。
2.2.2 框架底面部分: 框架底面用螺纹固定着四个万向轮。
2.2.3 框架正面部分:
2.4.3 4 个滑动模块固定在载物板上,电机的转动提供动力,这样滑动模块在滑轨上滑动,这样就可以整体运动。
2.2.3.2 正面下方左侧用扎带固定有电源设备。
2.2.4 框架后面部分:
后面上方在两根支撑柱之间焊接一个金属角铁,用来实现连接[3]。
2.2.5 框架两个侧面部分:
框架侧面焊接有金属四条(一侧两条)折面,用来固定内部纵向轨道。 每个侧面的两条金属折面由一个长度较短的金属面焊接在一起,起到固定作用。
2.2 升餐盘装置设计
升餐盘装置共由6 部分组成(如图3 和图4):

图3 升餐盘装置3D 模型
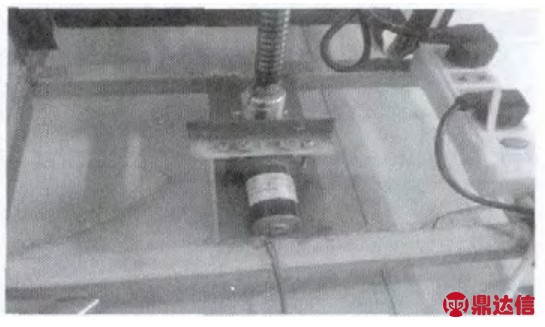
图4 升餐盘装置实物模型
2.2.1 电机:电机提供动力,固定在地盘上的电机的通过联轴器带动丝杠的转动,推动托盘上升。
2.2.2 联轴器:连接电机与丝杠,带动丝杠的转动。
2.2.3 轨道:由4 根角铁固定在底面上,角铁的凹槽对着电机,大小与托盘的面积相同。 作用是防止托盘上升的过程中摇晃。
2.2.4 转轴:和丝杠配合,丝杠转动带动转轴,转轴在丝杠上由电机带动实现上下移动。
2.2.5 托盘:
2.2.5.1 托盘上表面的长宽比餐盘的长宽各大10 厘米,表面光滑,和餐盘的上表面贴合的比较好,并且上表面有一个凸起,所形成的面积正好和餐盘的面积相等,这样餐盘就可以在上升的过程中不发生滑动现象。
2.2.5.2 托盘下表面固定在支撑杆上, 焊接连接,并且又加4 个螺丝固定, 这样在升降多个餐盘的时候不发生断裂或弯折现象。
2.2.6 传感器:
2.2.6.1 升餐盘装置初始化传感器,安放在正面轨道内,当餐盘下降,托盘的下表面碰到传感器时,电机停止转动,延迟10 秒钟,餐盘放入后电机转动,实现餐盘的纵向运动,这样实现餐盘的上升。
2.2.6.2 升餐盘装置停止传感器, 安放在装置的正面,在传送装置的下面,当餐盘上升,餐盘的下表面碰到传感器,电机停止转动,延迟10 秒钟,转送装置工作,实现餐盘的纵线运动变为横向运动。
2.3 清洗结构
2.3.1 当餐盘上升到碰到碰撞开关的时候,3 个舵机带动3 个高压水枪进行冲洗餐盘的下表面。
2.3.2 当餐盘由吸盘吸住进行横向运动的时候,毛刷配合两个高低不同的高压水枪进行刷洗和冲洗。
2.3.3 当刷洗和冲洗结束以后, 餐盘放到降餐盘装置上,高能紫外线灯进行消毒[4]。
2.4 传送装置结构设计
传送装置由电机、齿条、滑轨、载物板构成。
2.4.1 电机与吸盘固定在载物板上当吸盘吸住餐盘的时候,电机通过和齿条的配合带动载物板运动。 实现餐盘的横向运动。
2.4.2 滑轨起固定作用,载物板固定在在滑轨上,电机就可以带动整个载物板横向运动。
大同刀削面是山西美食的代表,但绝不是全部。山西每个地区几乎都有当地以面为主的特色美食佳肴,如大同、吕梁一带的莜面栲栳栳,晋北的高粱面鱼,太原附近的稍梅、擦尖等都是这类面食小吃的代表。
2.4.4 载物板的下表面安装碰撞开关, 当餐盘上升碰到碰撞开关,托盘停止上升,吸盘吸住餐盘,载物板带动餐盘横向运动。
2.5 其他小部件设计
2.5.1 空压机:
空压机出气口分为两路分别为吸盘吸住餐盘和高压水枪提供动力。 采用的空压机型号为v-0 17/8 排气量0.15 压力0.8 功率1.5[5]。 (如图5)[6]
2.5.2 电池阀:
电磁阀里有密闭的腔,在不同位置开有通孔,每个孔都通向不同电磁阀的油管,腔中间是阀,两面是两块电磁铁,哪面的磁、铁线圈通电阀体就会被吸引到哪边,通过控制阀体的移动来挡住或漏出不同的排油的孔, 液压油会进入不同的排油管, 然后通过油的压力来推动油缸的活塞,活塞又带动活塞杆,活塞杆带动机械装置动。 这样通过控制电磁铁的电流通断就控制了机械运动[6]。

图5 空压机

图6 电磁阀
2.6 详细尺寸及理论计算
本计算是基于该实物模型得出的
主电机功率P=15 W=0.015KW,
转速:n=23RPM
根据差速电机的输出扭矩公式:
T=9550P/n
经计算得:T=9550*0.015KW/23rpm
=6.2n·m
=62kg·cm
故而得到一个电机功率与输出力的对应关系:15W输出12.4kg 这个力对应的是餐盘的起重载荷量。
另外, 上下电机输出的横向推动力为10W:8.27kg,由于载物板固定在滑轨上,所造成的摩擦力很小,根据F=f*G, 得知在该推动力下, 所能推动的重量为F/f=8.27kg/0.2=41.3kg。
经对比可以看出, 载物板的承载能力取决于主电机的拉动力[7]。
3 电气控制系统
3.1 整体控制电路
主要包含以下元器件。
AVRmega16 微控制器一片、12864 液晶屏一块、4x4矩阵键盘一个、碰撞开关4 个、继电器3 个、直流电动机3个、三极管3 个、串口通信接口1 个。
3.2 碰撞开关
A.碰撞传感器的布局设计
碰撞开关放置于一侧的4 个角上, 任意一个存储仓库单元碰到任意一个碰撞开关, 都会被单片机检测到,MCU 将触发相应的电机开始转动。具体设计如下:
3.2.1 首先,托盘带动餐盘纵向移动,当餐盘的表面碰到载物板的下表面的碰撞传感器,托盘停止上升。 吸盘吸住餐盘;
3.2.2 下一步载物板在电机的带动下横向移动,当碰到齿条末端的碰撞传感器,载物板停止运动,吸盘放开餐盘;
3.2.3 餐盘在托盘的作用下纵向向下移动, 碰到碰撞传感器,托盘停止运动;
3.2.4 下一步载物板返回, 碰到齿条首段的碰撞传感器,停止运动,准备吸下一个餐盘做准备;
3.2.5 按照以上步骤,进行循环工作,直到清洗完所有餐盘。
B.碰撞传感器的电气工作原理:
碰撞传感器的内部结构相当于一个普通开关, 它的两根引脚, 一根接地GND, 另一边通过上拉电阻引入AVR 单片机控制器的PA0:3,总共4 个端口,工作时,由控制器读取IO 的状态,由于连入了上拉电阻,当未触发开关时,IO 默认为高电平,即输入为1,当有存储仓库单元碰撞时,IO 被连接入GND,IO 接变为0, 从而实现了MCU 对该外围设备的控制[8]。
3.3 输入设备设计[9]
在键盘中按键数量较多时, 为了减少I/O 口的占用,通常将按键排列成矩矩阵形式。 在矩阵式键盘中,每条水平线和垂直线在交叉处不直接连通, 而是通过一个按键加以连接。 这样,一个端口(如P1 口)就可以构成4*4=16个按键,比直接将端口线用于键盘多出了一倍。
按键的检测原理如下, 单片机的PC 口用作键盘I/O口,键盘的列线接到P1 口的低4 位,键盘的行线接到PC口的高4 位。列线PC.0-PC.3 分别接有4 个上拉电阻到正电源+5V,并把列线PC.0-PC.3 设置为输入线,行线PC.4-PC.7 设置为输出线。 4 根行线和4 根列线形成16 个相交点。
首先让P1 口高四位为1,低四位为0,。 若有按键按下,则高四位中会有一个1 翻转为0,低四位不会变,此时即可确定被按下的键的行位置。
然后让P1 口高四位为0, 低四位为1。 若有按键按下,则低四位中会有一个1 翻转为0,高四位不会变,此时即可确定被按下的键的列位置[10]。
3.4 显示设备
屏幕选择的是含中文字库的12864 液晶[11],产品的各项操作均有屏幕汉字提示,人性化操作。
控制器有输入要求时,会在液晶上面显示提示,提示菜单一般分为4 个选项,分别对应键盘上的1-4 号按键,按下相应的按键,MCU 会执行相应的程序,另外在某些没有提示的界面,可以按下“#”号键退出,同时返回上层菜单或回到首页菜单。
3.5 其他传感器
为充分利用单片机的端口资源, 产品加入了以下功能模块:光敏传感器、火焰传感器。
光敏传感器在装置内部, 使装置运行的过程中更加准确无误。
火焰传感器, 它是基于AD 转换的一个模块, 利用AVR 单片机的内部AD 转换,可以实时读取火焰的强度,无火和有火所反馈回来的数值火焰传感器和串口有很大差别,我们通过设定这个阀值,可通过程序判断附近是否有明火[12]。
3.6 微控制器与计算机连接控制电路
我们的产品可以与计算机进行连接通信, 采用的是计算机串口连接, 连接线是SERIAL—USB (串口转接USB),在MCU 微控制器一端再接入MAX232,进行计算机的12V—单片机5V 的TTL 电平转换, 最后通过RXD和TXD 两根引线即可与PC 进行双向通信了。
连接入计算机以后MCU 将实现以下功能:
3.6.1 控制器对餐盘的清洗操作都有详细的记录,包括记录清洗餐盘用的时间,消毒时间等,通过屏幕的选取操作,可以把记录的数据传到计算机上进行统计管理。
3.6.2 连接电脑以后, 可以更改清洗时间和消毒时间等。
4 结论
4.1 设计创新点
4.1.1 设计新颖的机械结构, 实现了自动餐盘清洗机所应该具有的功能。
4.1.2 餐盘整体放入,单个清洗,省时省力,清洗更高效。
4.1.3 通过舵机、 单片机和各种部件的配合做到清洗时完全自动,无需人的控制。
4.1.4 清洗速度快, 节省时间, 极大的提高工作效率,能够很好解决节假日期间清洗工作忙的难题。
4.1.5 系统可连接入计算机进行数据的统计与管理。
4.2 前景展望
本产品功能强大,清洗便利,操作简单,且制作成本低廉,可用于大中型学校食堂和企业餐厅。 鉴于该产品强大的功能基础,且市场上还未出现类似的产品和装置,所以该产品应用前景广泛,尤其是当今社会,餐饮业越来越发达。 使用这种餐盘清理清洗机械,能减少劳动力资源,提高清洁效率,能大大改善食堂的就餐环境,给食堂经营带来经济效益。 尤其是在现代社会高效率、快节奏的背景下,社会的发展对智能化、信息化提出了更高的要求,本作品对控制和计算机的应用充分体现了该特点, 具有鲜明的时代特征。


