
摘 要:主要分析了应用在流水线机械手的运动控制体系,该体系使用三菱的FX系统中的PLC为控制器,给出了具体的控制过程、I/O分配、详解控制面板的硬件接线图,阐述了PLC的控制程序,并采用触摸屏进行了人机界面的控制,方便了相关人员全面认识该系统的工作状态。
关键词:PLC;工业机械;手臂控制;流水线
机械手主要是为了对人的手臂部分动作进行模仿,根据操作工具、预定程序的吸附与搬运物件自动操作的装置,可以将工人从繁重、重复的劳动中彻底解放,完成生产自动化和机械化。同时,应用机械手可以在恶劣的环境条件中工作,确保人身安全,在各种制造行业中有广泛应用。而PLC具有调试方便、可靠性高、编程简单等优势,在工业领域有着广泛应用。
1 运动过程和控制要求
本次主要在装箱机、流水线与抛光机间设置机械手,这样可以在各种工作的区域间进行转换,具体从图1中可以看出。主要流程为:将工件运到流水线A后,相关机械手可以收到信号,并进行移动和吸附工作,将信号放至抛光机B上抛光,完成抛光后,机械手可以将吸附工件置于流水线C。

图1 机械手示意图
1.1 驱动的方式
横梁的方向移动通过电机M1进行驱动,包含3个不同的工位,在SQ6、SQ4与SQ5的位置,其总行程是1 200 mm;通过PLC对KM1、KM2接触器进行电机正反转控制。如果接触器KM1有电,则会使电机M1正转,牵动机械手沿着横轴向右移动。如果KM2有电,则会使电机M1反转,牵动机械手沿着横轴向左移动。
纵梁方向移动方向通过电机 M2驱动,两个工位主要在SQ10与SQ7位置,其总行程为1 000 mm。通过PLC对KM3、KM4接触器进行电机正反转控制。如果KM3有电,则会使电机M2正转,牵动机械手沿着纵轴向前移。如果KM4有电,则会使电机M2反转,牵动机械手沿着纵轴向后移。
竖梁方向的移动主要是通过气缸 G1驱动的,一共包含 2个不同的工位。在SQ12位置,其移动总行程为3 000 mm。在整个气动系统中,主要包含伸缩气缸、气源、气动系统的控制阀与气动的三联件等部件,通过空压机来获取气源。经过气动三联件,可获得干燥、清洁的空气,并经电磁阀进行运动转换。PLC在进行电磁阀YV6、YV5的控制时,可以对气缸进行控制,控制竖梁下降与上升(YV6得电下降,失电即上升)。
1.2 控制过程
主要控制过程为:当工件到A以后,SQ0动作,经过程序的控制让纵轴前移(电动机M2得电正转)→前移到位(SQ10动作)→下降(YV6带电YV5失电,节流阀与电磁的换向阀会将空气带到 G1上的缸体中,气缸驱动沿着数轴向下降)→下降到位(SQ12动作)→吸附(电磁阀YV7带电,经过节流阀与电磁的换向阀会将空气带到 G2下的缸体中,机械手对工件进行吸附)→延时5 s→上升(控制阀YV6失电,YV5得电,维持吸附的状态上升)→上升到位(SQ11动作)→纵轴后移(KM4得电,电动机M2得电反转)→后移到位(SQ7动作)→横轴前移(接触器KM1带电,电机M1产生正转,并且牵动横轴向左移)→到达B的位置(SQ5动作)→纵轴前移(KM3得电,电动机M2得电正转)→前移到位(SQ10动作)→下降(控制阀YV6带电,YV5失电,经过节流阀与电磁的换向阀会将空气带到G1上的缸体中,然后气缸驱动会沿着数轴向下降)→下降到位(SQ12动作)→放置工件(YV7断电,经过节流阀与电磁的换向阀会将空气带到 G2上的缸体中,松开机械手开始工作)→延时5 s→上升(控制阀YV6失电,YV5得电)→上升到位(SQ11动作)→延时20 s(抛光工件)→下降(控制阀YV6带电,YV5失电,经过节流阀与电磁的换向阀会将空气带到 G1上的缸体中,气缸驱动沿着数轴向下降)→下降到位(SQ12动作)→吸附工件(YV7带电,通过机械手将吸附工件抓住)→延时5 s→上升(控制阀YV6失电,YV5得电)→上升到位(SQ11动作)→纵轴后移(KM4得电,电动机M2得电反转)→后移到位(SQ7动作)→横轴前移(接触器KM1带电,使电机M1产生正转,牵动横轴向左移)→到达C的位置(SQ6动作)→纵轴前移(KM3得电,电动机M2得电正转)→前移到位(SQ10动作)→下降(控制阀YV6带电,YV5失电,经过节流阀与电磁的换向阀会将空气带到G1上的缸体中,气缸驱动沿着数轴向下降)→下降到位(SQ12动作)→放置工件(YV7断电,经过节流阀与电磁的换向阀会将空气带到 G2上的缸体中,松开机械手开始工作)→延时5 s→上升(控制阀YV6失电,YV5得电)→上升到位(SQ11动作)→纵轴后移(KM4得电,电动机M2得电反转)→后移到位(SQ7动作)→横轴后移(接触器KM2带电,电机M1反转,牵动横轴向右移)→到达A位置(SQ4动作)停止。
以上整个过程属于一个循环的过程。自动循环的过程中最为重要的是自动回原点,具体如图2所示。
2 软件设计
由于系统具备手动与自动两类工作方式,即可将程序分成自动控制的程序和手动控制的程序。
2.1 手动控制程序
在进行手动操作的过程中,通过各对应手动操作的按钮对机械手动作进行控制,主要包含放松、左移、下降与后退等动作。为了确保系统的安全运行,需要在手动的程序之中设置软件的联锁,防止误动作发生。但机械手需要处于较高的位置才可以前后、左右移动,要处于SQ11位置时才可以沿着纵轴、横轴移动,所以,需要将常开触点设置成联锁,以免在较低的位置机械手出现碰撞。
2.2 自动控制程序
自动操作的程序需要按照机械手动作的过程制订自动操作程序,通过顺序设计的方法设计,具体如图3所示。

图2 自动回原点程序
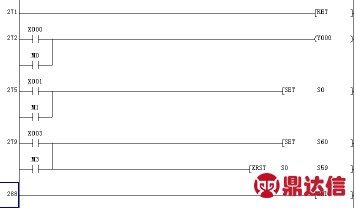
图3 手、自动切换程序及停止程序
3 硬件设计
3.1 PLC的选型与I/O口的分配
PLC的选型如表1所示。
表1 PLC的选型
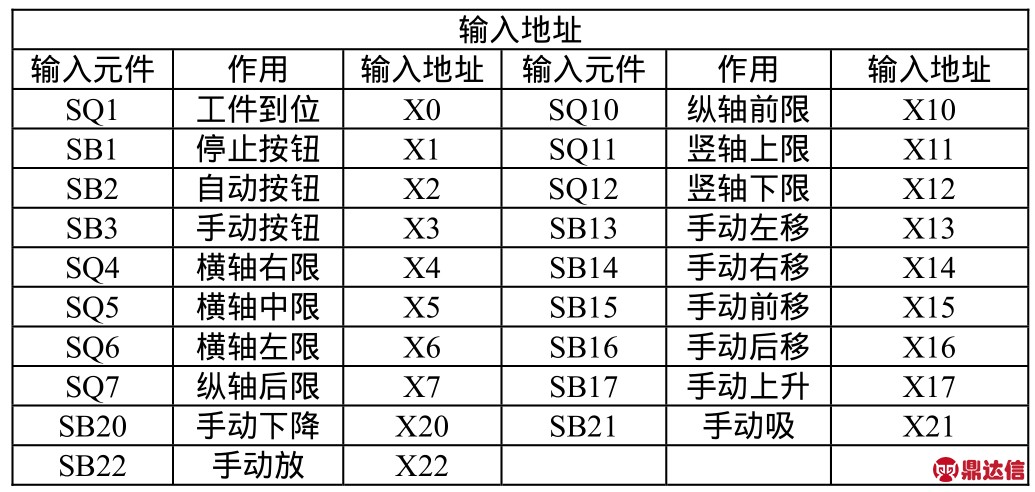
I/O口的分配如表2所示。
表2 I/O口的分配

按照以上输出情况,选择了三菱公司的FX2N-48MR作为控制器。
3.2 电路设计与控制面板
通常情况下,机械手要手动操作,比如手动控制设备启动、停止等,同时,需要设置操作面板。在操作面板上,需要设置手动控制和手动开关等按钮。此外,在面板内需要设置转换电源的模块,从而将220 V电压转变成24 V直流电压,以作为PLC的输入端电压;需要对控制电路进行严格设计,分配好输出接点和PLC输入,将按钮与各开关接到PLC的输入端,并将接触器与电磁阀接到PLC输出端。具体如图4所示。

图4 PLC外部接线
4 监控系统的设计
本次设计通过三菱触摸屏 GT1100作为监控终端,触摸屏要在各个工作中构建通信连接。同时,对数据库与数据变量进行了构建,落实了动画连接于机械手的画面设计等工作,并进行了调试运行。触摸屏操作界面如图5和图6所示。

图5 触摸屏操作界面一
为了构建与PLC通信的连接,需要在PLC菜单串行口增设通信参数与通信地址。其中,组态中变量定义和PLC变量相同,具有一一对应的关系。如果PLC之中的变量值出现变化,则会使组态的变量值发生改变,经过对应设置以后,可以确保实际变化与画面相同,在数据变量实时值出现改变之时,会在画面上反映出场信号。
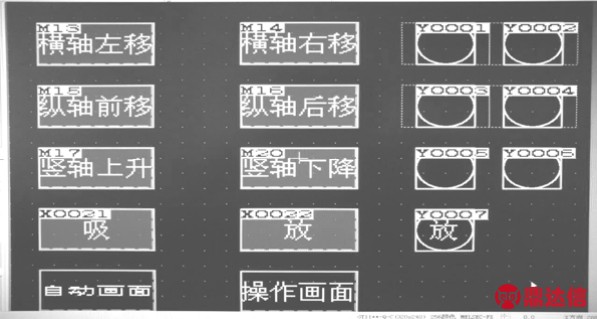
图6 触摸屏操作界面二
由于系统建立图形的画面没有动画便会静止,因此,需要对图形对象数据的变量进行定义,确立连接管理,使对象状态的变化得以表现。
5 结束语
综上所述,按照行程差异,需要使用气缸与电机两种方式驱动机械手,以便实现控制效果。由于三菱PLC的结构比较紧凑,其性能相对稳定,有良好的控制效果,易实现模块化。在机械手的控制发生改变时,需要对相应的程序进行改动,并对硬件进行简单修改,装设触摸屏进行人机界面控制,以便监控。


