
摘要:为研究CMUT指向性,将CMUT微元看成圆形活塞式换能器,根据指向性函数的理论,计算出CMUT微元的指向性公式,依据Bridge乘积原理,推导出了一种计算CMUT阵元、CMUT一维线阵和CMUT面阵指向性公式,并利用MATLAB软件对CMUT微元、阵元、线阵和面阵指向性进行了仿真分析,得出CMUT类型对指向性、主瓣宽度和旁瓣的影响,证实了多维模型的优势,为CMUT结构优化设计提供了基础。基于CMUT微元声场理论分析基础,根据瑞利-索末菲积分公式推导出CMUT阵元、CMUT阵列的辐射声场分布函数,并仿真验证了其聚焦和指向性性能。
关键词:电容式微机械超声传感器(CMUT);声场;指向性;MATLAB;仿真
0 引言
海洋测绘是对海洋表面及海底的形状和性质进行准确测定和描述的学科,是一切海洋活动及开发的基础[1-2]。水下三维成像在海底资源勘探、水下地形地貌探测、海底管道检查、蛙人探测、水中物体观测、水下目标识别、水下避障和导航等方面有着广泛的应用,是潜水器的重要装备[3-5]。三维成像声呐与传统二维成像声呐相比,增加了图像的深度信息[6],能够提供水下目标的三维信息,得到的图像具有更多良好的性能,使图像具有更清晰的轮廓识别度,并可以在三维空间进行旋转观测等。换能器二维面阵是实现三维成像声呐的基础和前提,也是成像声呐的关键核心部件。基于MEMS技术制作的电容式微机械超声传感器(CMUT)具有结构简单、体积小、自身噪声低、灵敏度高、高分辨率、硅材料与介质阻抗匹配好等特点[7-10],在水下三维成像领域有着广阔的应用前景,终将取代传统的压电式超声传感器成为市场主流产品。
1 电容式微机械超声传感器工作原理
在超声成像系统中,最小基础单元是CMUT微元,其结构如图1所示。微元由基座、绝缘层、真空腔、振动膜、金属上电极、边缘支撑等几部分组成[11]。由于单个微元在发射功率、成像分辨率、成像清晰度、指向性等方面存在一定的局限性,电容式微机械超声传感器由多个CMUT微元组成阵元,再由阵元按特定的方式进行排列,形成CMUT阵列来改善其性能。
图1 CMUT微元结构示意图
2 指向性
2.1 指向性分析
CMUT指向性形成的物理原因是发射的超声波在自由空间中干涉叠加的结果,将辐射面上每一点看作声源,点声源所产生的声波是没有指向性的球面波,所有这些子波相互叠加,在发射空间的远场便形成了指向性。其数学意义为:在超声空间中,距离换能器阵列声源中心为r的球面上,任意点P处的声压值与主轴方向点S(θs,αs)处最大声压值之比,如式(1)所示:

(1)
把CMUT微元看成半径为R的圆形活塞式换能器,在微元表面加一正弦激励,使微元上各点均匀振动,则可得出CMUT微元声场指向性函数,如式(2)所示:
(2)
式中:θ为声线与+z轴间的夹角;α为声线在xoy平面上的投影与+x轴间的夹角;R为CMUT微元半径。
对于结构较复杂的阵元指向性函数,一般可由一些简单结构阵的指向性函数通过加法定理和乘积定理组合而成,二维平面阵元由M×N个CMUT微元组成,根据Bridge乘积原理,该阵元的指向性函数为式(3):
De(α,θ,αs,θs)=D1(α,θ,α,θs)·D2(α,θ,αs,θs)·Dc
(3)
D1(α,θ,αs,θs),D2(α,θ,αs,θs)分别如式(4)、式(5)所示:
(4)
(5)
本文设计了两种CMUT阵列,第一种由Ma个阵元组成一维CMUT线形阵列,第二种由Ma×Na个阵元组成二维CMUT面阵,根据Bridge乘积原理,CMUT阵列指向性函数分别如式(6)、式(7)所示:
(6)

(7)
式中![]() 如式(8)所示,计算时令M=Ma,N=Na。
如式(8)所示,计算时令M=Ma,N=Na。
(8)
2.2 指向性仿真
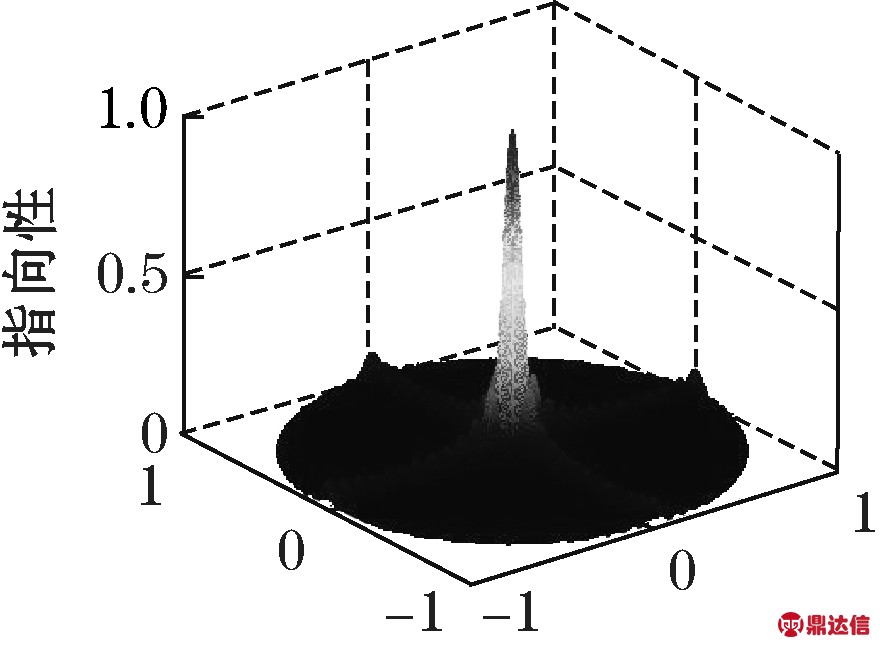
根据指向性函数,利用MATLAB软件,可以很直观地绘制CMUT指向性图,如图2所示。依据指向性设计准则:减小主瓣宽度、抑制旁瓣和消除栅瓣[12],设定CMUT微元半径R=90 μm,工作频率f=400 kHz,水中声速c=1 540 m/s,阵元间距d=0.6×c/f。图2(a)为微元、阵元和阵列在xoy面的二维指向性;图2(b)为由6×6个CMUT微元组成的CMUT面阵阵元空间指向性;图2(c)为由5×60个CMUT微元组成的CMUT线阵阵元空间指向性;图2(d)为由16个线阵阵元组成的线阵空间指向性;图2(e)为由16×16面阵阵元组成的面阵空间指向性。
(a)二维指向性
(b)面阵阵元空间指向性
(c)线阵阵元空间指向性

(d)CMUT线阵空间指向性
(e)CMUT面阵空间指向性
图2 CMUT微元、阵元和阵列指向性
从图2(a)图中可以看出,CMUT微元几乎没有指向性,主瓣较宽,能量很分散;图2(b)、图2(c)中,随着微元数从5,6和60的增加,CMUT阵元的主瓣宽度逐渐变窄,指向性明显增强,但仍有大量能量较强的旁瓣出现;图2(d)中,CMUT线阵排列方向,主瓣宽度明显改善,但旁瓣幅值仍然较高;图2(e)中,主瓣能量集中,旁瓣更好地得到抑制。
3 声场分析
3.1 CMUT微元声场分析
对于所设计的半径为R的圆形活塞式换能器模型如图3(a)所示,当圆盘做简谐运动时,圆盘上的每个微小单元都可看做点声源,将所有点声源激发的声压进行叠加组成声波的声压,声源在声轴上点z处的声压如式(9)所示,其声压分布如图3(b)所示:
(9)
式中:ω为角频率;R1为目标点与声源点之间的距离;ρ0为介质的密度;ua为换能器的表面振速;k为波数,如式(10):
k=2πf/c0=2π/λ
(10)
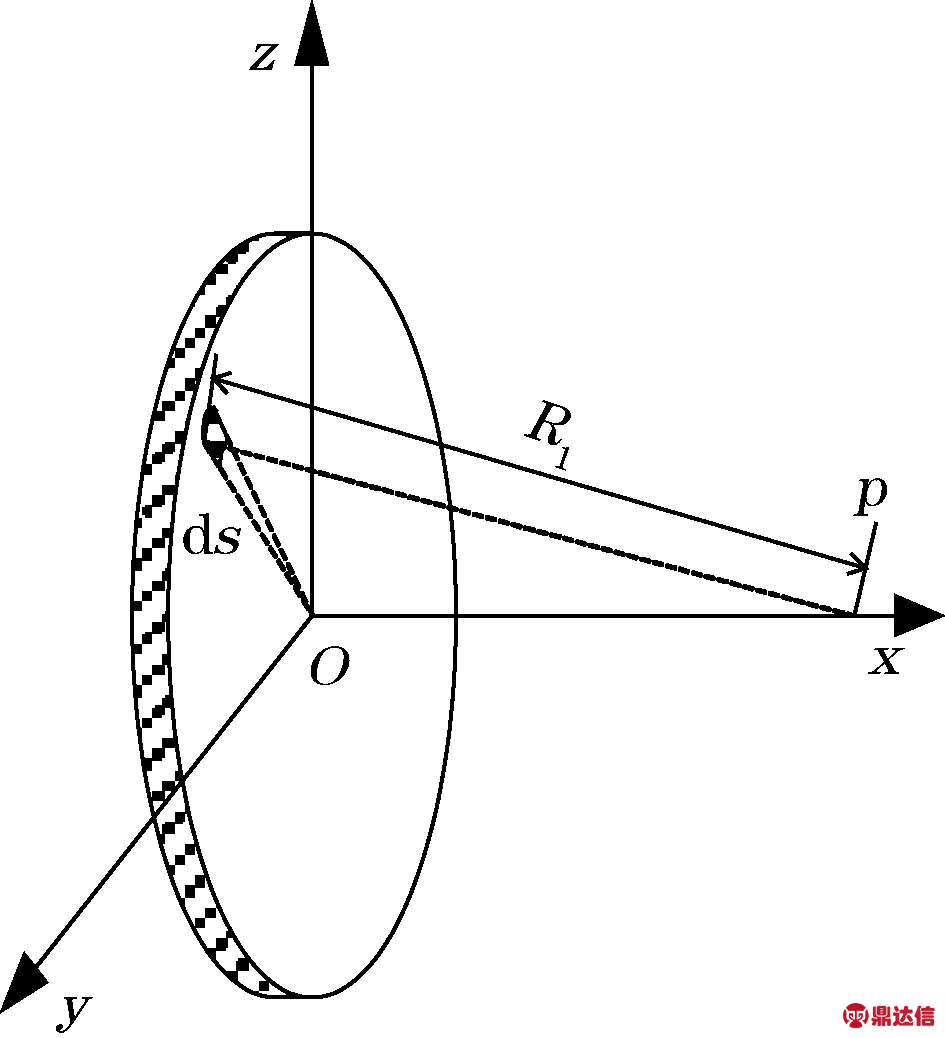
(a)圆盘声源模型
(b)微元声压分布
图3 圆形活塞式声源模型及声压分布
3.2 CMUT阵元声场分析
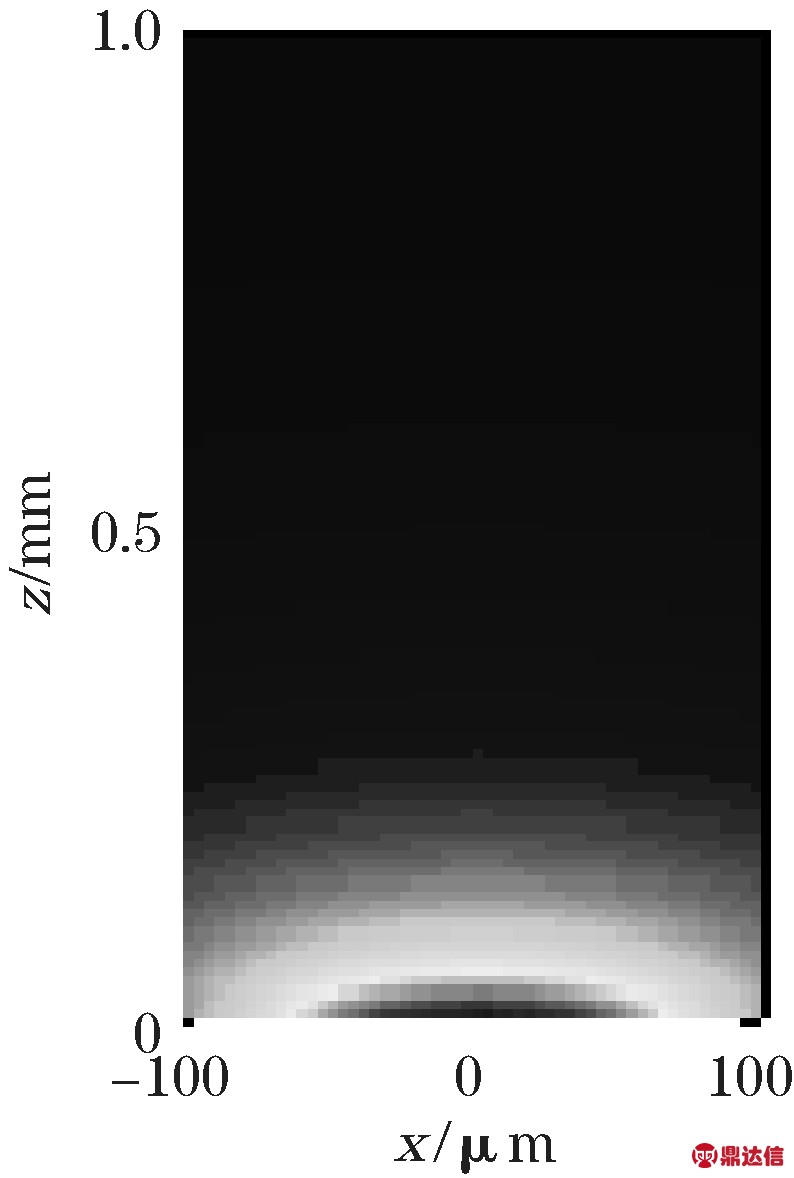
根据惠更斯原理,辐射场中的任意点的声压是声源上所有点在该点产生的声压叠加之和。在声场分析时,需将分析的模型理想化。对于一个有限尺寸的声源辐射,可以把CMUT阵元看成矩形振动声源,其模型如图4(a),其由无限多个小面元ds组成,假定每个面元的振动是均匀的,声源上各点的振动幅值和相位都是相同的,并且超声波在介质中传播不发生能量衰减,利用瑞利-索末菲积分公式计算声场中任意点P(x,y,z)处声压,如式(11)所示,其在偏转角θ=0°,聚焦点(0 mm,0 mm,0.1 mm)、θ=30°,聚焦点(0.05 mm,0,0.086 mm)以及θ=60°,聚焦点(0.086 mm,0,0.05 mm) CMUT阵元声场分布如图4(b)~图4(d)所示:

(11)
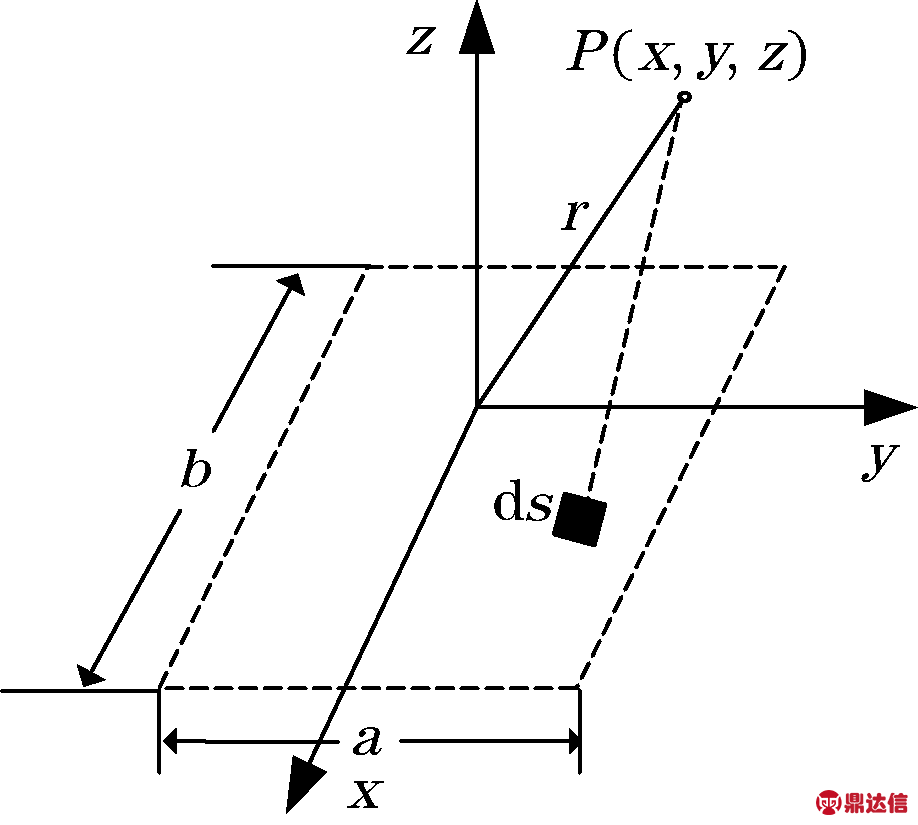
(a)矩形声源模型
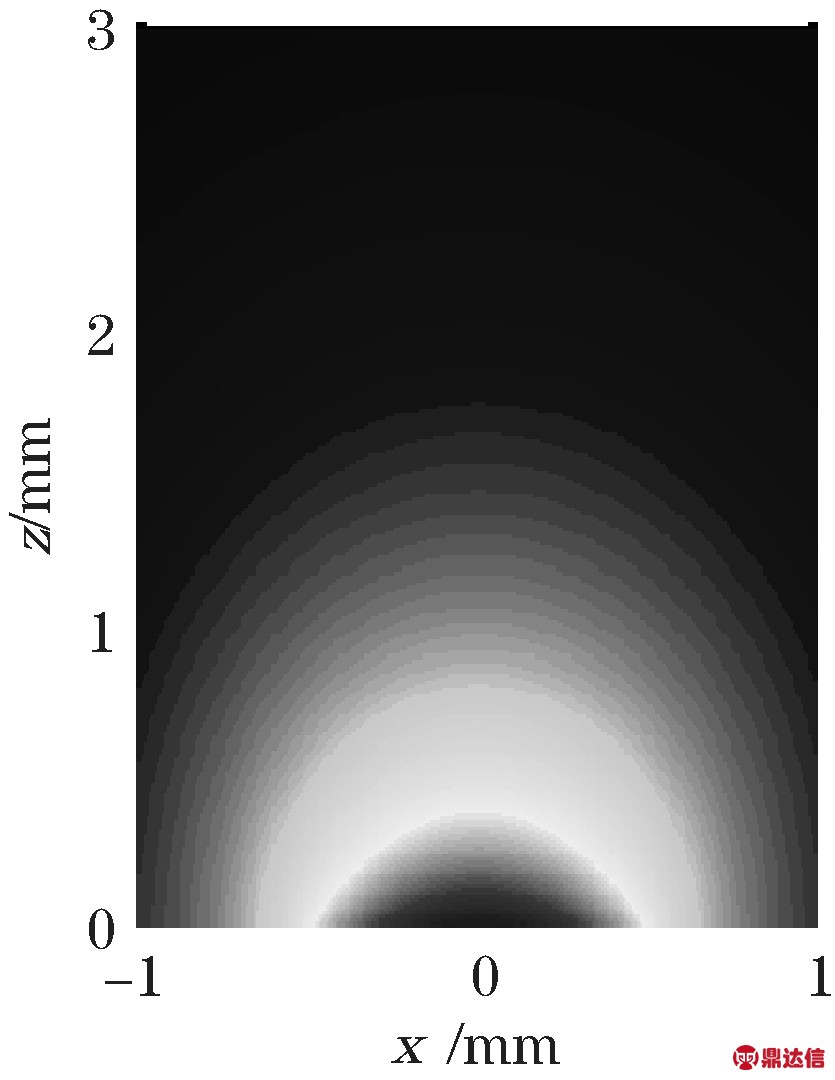
(b)聚焦(0,0,0.1)
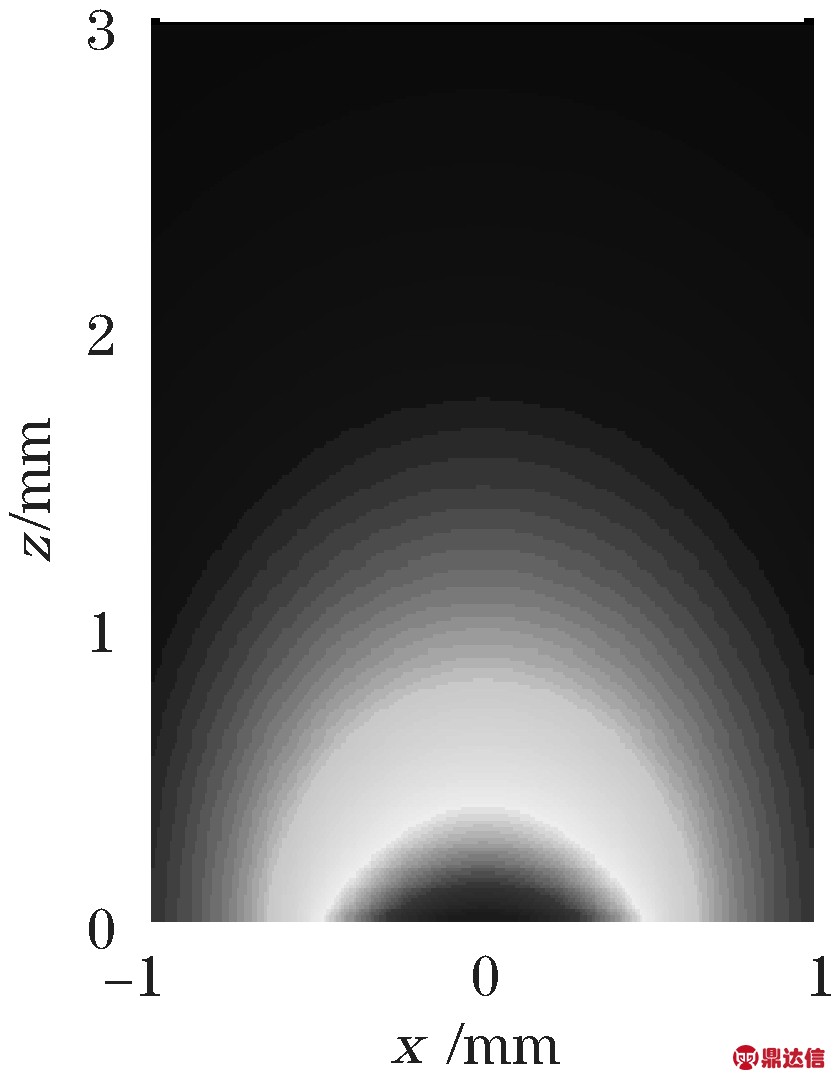
(c)聚焦(0.05,0,0.086)
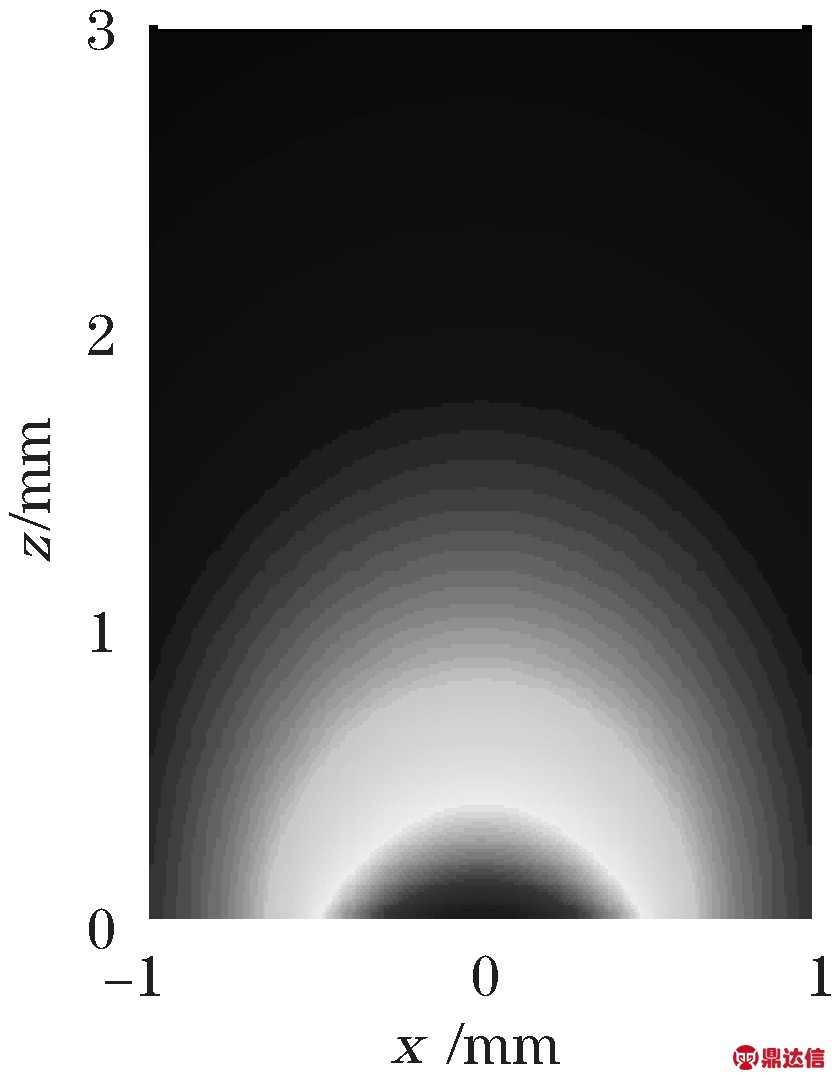
(d)聚焦(0.086,0,0.05)
图4 CMUT 6×6阵元声场
从图4可以看出,6×6阵元的声压分布比图3微元的声压略强,但是随着偏转角度的增加,聚焦效果没有任何变化,这与图2中6×6阵元几乎没有指向性分析结果一致。
3.3 CMUT阵列声场分析
由Ma×Na个CMUT阵元排列组成CMUT二维面阵时,模型如图5所示,超声波束在实现波束的偏转和聚焦时,每个CMUT阵元都需要按照一定的延时规律来发射声波,即每个阵元的辐射时间不同步,因此辐射场计算中引入相控阵换能器的初始相位αn,将每个阵元的声辐射场进行叠加[13],即得到相控阵换能器总的声辐射场函数如下式,其在偏转角θ=0°,聚焦点(0,0,20 mm)、θ=30°,聚焦点(10 mm,0,17.3 mm)、θ=60°,聚焦点(17.3 mm,0,10 mm)的CMUT阵列的声场分布如图5(b)~图5(d)所示:

式中:kmn,umn,ωmn,rmn,αmn分别为阵列中第mn个阵元的波数、振动速度、角速度、初始相位、面元到场点的距离。
从图5可以看出,16×16阵列的声压分布比图4阵元的声压分布明显增强,声压在焦点附近达到最大值,这与图2 阵列具有较强的指向性分析结果一致。但是随着偏转角度的增大,聚焦效果变差。
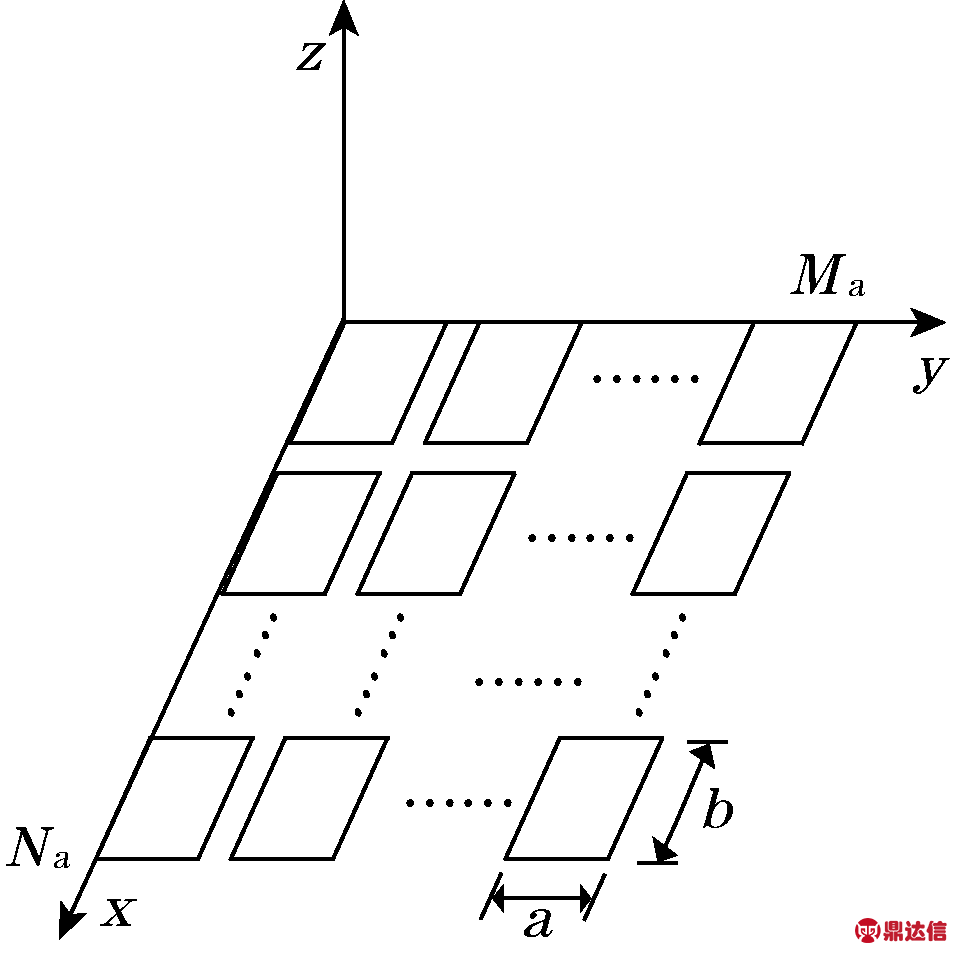
(a)声场模型
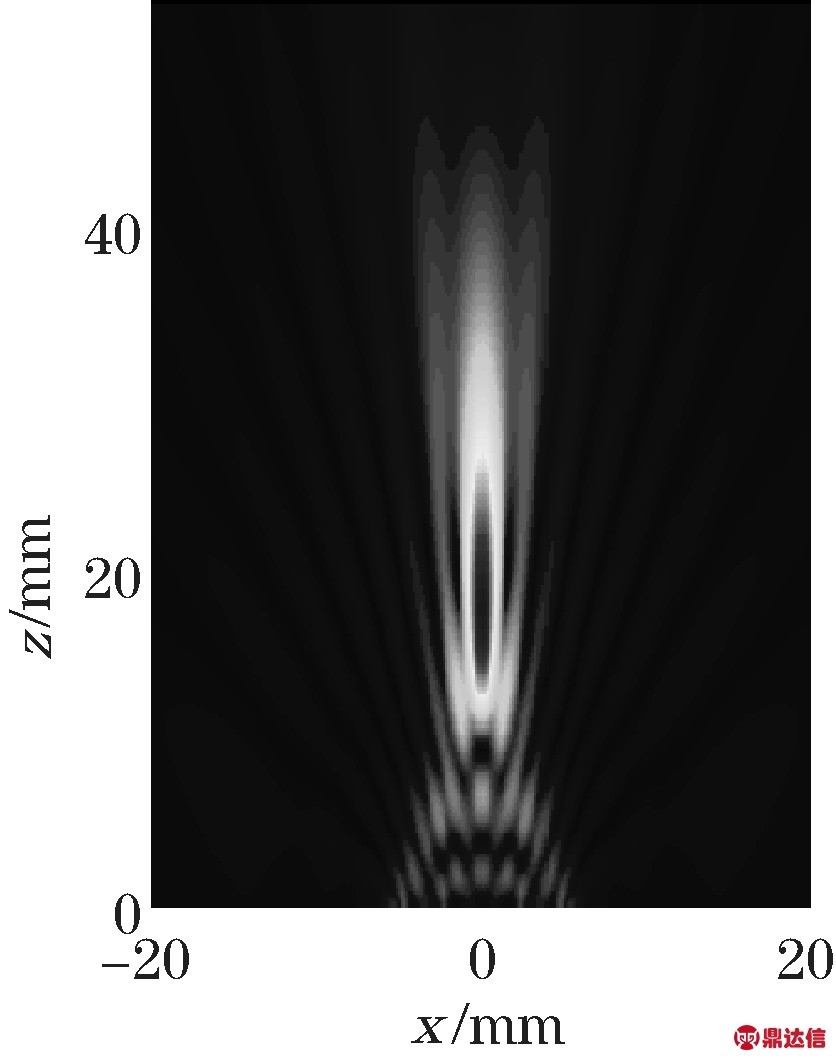
(b)聚焦(0,0,20)
(c)聚焦(10,0,17.3)
(d)聚焦(17.3,0,10)
图5 CMUT声场示意图及声场分布
4 结束语
把CMUT微元视为半径为R的圆形活塞式换能器,并根据Bridge乘积原理,依次推导出CMUT阵元、CMUT一维线阵和面阵的指向性函数,通过MATLAB仿真可得:CMUT微元几乎没有指向性,主瓣很宽,能量非常分散;CMUT阵元有一定的指向性,但主瓣仍然较宽,旁瓣能量较大;CMUT一维线阵和二维面阵的指向性明显改善,并且有效抑制了旁瓣。通过对CMUT辐射声场分布仿真,验证了偏转角度对聚焦效果的影响,这为后续进行CMUT结构优化设计提供了依据。


