
摘 要:针对复合材料智能蒙皮静载响应监测下的定位识别技术开展研究,提出并设计了一种静载识别验证系统。选用碳纤维复合材料板(CFRP)为研究对象,搭建光纤布拉格光栅正交对称式传感网络对复合材料板进行静载位置识别。利用数据相关加权系数理论和算法,对加载位置进行识别,实验表明定位精度低于2 cm。设计的静载识别验证系统为CFRP蒙皮结构健康监测提供了新思路和新方法。
关键词: 复合材料;智能蒙皮;静载识别;光纤布拉格光栅
0 引 言
损伤判位技术[1-2]能够对结构中的损伤位置进行预判或检测,减少损伤带来的不必要经济损失,目前已经成为复合材料结构健康监测中的研究热点之一。因此,针对损伤判位中的静载定位识别技术进行研究具有相当重要的意义。
碳纤维复合材料(carbon fiber reinforced plastics,CFRP)材质轻且强度高,在航空航天领域中的关键器件和结构中具有显著的优势。传统的声发射超声、激光探伤等方式需要激励源,并且对于结构位置载荷定位的实时监测具有一定的局限性;诸如电阻应变片等表贴传感器引线重量大、布设改装工程复杂。近年来新兴的光纤布拉格光栅(fiber bragg grating,FBG)传感器具有尺寸小、重量轻、灵敏度高、抗电磁干扰和耐腐蚀能力强以及可通过复用构成传感网等优点[3-4],并且能与复合材料的结构有机结合,已经在航空航天、卫星、电力、桥梁、土木工程等领域中[5]得到广泛应用[6-7]。美国Boeing公司[8]在Boeing 787的机翼蒙皮上布置了数百根光纤布拉格光栅传感器,对其应力、应变、温度等物理量进行实时监测。马拉西亚玛拉理工大学利用嵌入式FBG传感器应用于蜂窝芯碳纤维夹芯板智能复合材料中,对飞机的结构完整性进行监测,结果表明FBG传感器能够及时的响应并判断出负载的施加位置[9-10]。韩国先进科学技术院利用一维FBG阵列和参考数据库算法对复合材料机翼随机撞击点进行定位[11]。目前,国内多以高校和科研单位为代表针对复合材料损伤定位监测开展研究[12-15]。中航工业北京长城计量测试技术研究所王文娟等人[13]将光纤光栅内埋与复合材料加筋板中对冲击的位置进行识别。武汉理工大学张东生等人利用光纤光栅检测复合材料板的损伤,提出一种基于双正弦解的应变模拟方法,为损伤识别及复合材料板的应变模拟提供基础[14]。光纤光栅传感监测原理都是基于传感栅区位置轴向形变对光栅反射光谱产生的波长漂移进行测量,但是对于诸如机翼结构的大面形载荷识别监测来说,需要布置合理的传感网络对其载荷状态进行重构识别。现有的研究中,大多数是针对光纤光栅与复合材料结合验证其传感性能可行性,少数研究人员对大面形复合材料光纤光栅网络开展了相关实验研究,如葡萄牙米尼奥大学的AFD Silva等人选用PVC聚合物材料作为基底,埋入FBG传感器制作出具有传感能力的智能蒙皮,并通过铺层布局优化,对智能蒙皮进行了相关结构设计和实验验证[15]。光纤光栅的点位置、单一方向感知的特点对传感网络布局要求较高,合理的传感布局对于复合材料载荷定位识别至关重要。
为了研究复合材料智能蒙皮静载响应监测下的定位识别方法,本文选用碳纤维复合材料板作为研究对象,设计采用FBG正交对称式传感网络对CFRP复合材料板进行静载位置识别,设计并搭建了基于光纤布拉格光栅传感单元结合复合材料智能蒙皮静载识别验证系统。
1 工作原理
根据耦合理论,有:
λ=2neffΛ
(1)
式中:λ 为反射波波长,neff为光纤光栅的有效折射率,Λ为光栅周期。当待测部位的物理量如应变发生变化时,会使得FBG传感器发生形变,即Λ会随之改变[16]。结合式(1)可知,当CFRP结构受到加载产生应力变化时,粘贴于结构表面的FBG波长会产生变化,从而实现CFRP结构应变变化的实时在线监测,即:
![]() =(1-pe)ε
=(1-pe)ε
(2)
式中:pe为有效弹光系数,ε为应变。
FBG的波长漂移所感知的是光纤轴向方向FBG栅区位置的形变,载荷作用点不可能正好在栅区位置,那么必然是通过多元FBG获得的信息进行综合分析,来判断载荷位置及大小等。因此,本文将多个不同波长的FBG正交对称布置,对所测物理量进行同时监测,获取传感信息样本集,构成准分布式FBG正交传感系统,图1所示为应用于CFRP蒙皮的准分布式FBG正交传感网络布局图。
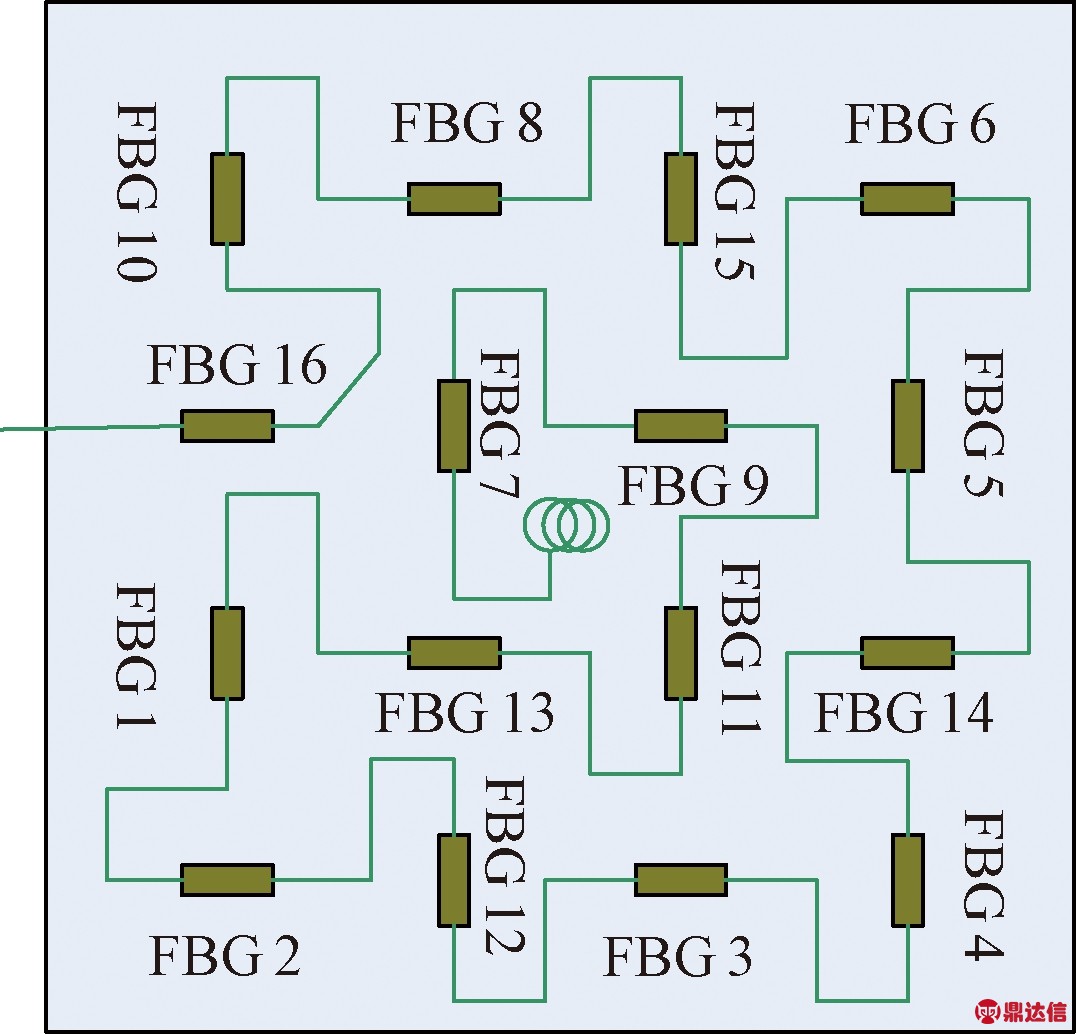
图1 准分布式FBG正交传感网络布局
Fig.1 Layout of quasi-distributed FBG orthogonal sensing network
静载定位识别[17]基本思路如下:CFRP复合材料板上的任意位置处的受力都可以看作是所有FBG传感器监测到的合力,并且加载坐标与FBG传感器信号变化量一一对应。通过计算加载位置处引起的FBG传感器信号变化与样本库中传感器响应变化量的相关系数,即样本库中各加载点的坐标权重,再乘以样本坐标矩阵就对加载坐标进行反推,因此,待识别的加载位置取决于所有样本的坐标综合相关加权。综上所述,利用该方法进行定位需要一定的先验数据,且识别精度与样本库中的样本数以及加载位置有关。
基于FBG正交对称式传感网络数据相关理论的静载定位识别[18]方法具体过程如下。
1)在CFRP复合材料板上划分N个加载单元,取在每个加载单元的中心位置作为加载点,将FBG传感器的中心波长变化量作为静载响应,则每个加载点处的传感器特征向量:
Pi = (Δ λi 1 ,Δ λi 2 ,…,Δ λi n )
(3)
式中:i=1,2,3,…,N,n为FBG传感器的总个数,Δ λi n代表第i个样本中的第n个FBG的中心波长变化量。
2)建立数据样本库S,则有S={P1,P2,P3,…,PN },并构建样本横坐标矩阵Χ0=[x1,x2,…,xN]与样本纵坐标矩阵Υ0=[y1,y2,…,yN],其中每个样本加载点的加载坐标为(xi,yi),i=1,2,3,…,N。
3)均匀正交配置n个FBG传感器,以实现对CFRP复合材料板的静载响应监测,本文所用的FBG传感器个数为16,即n=16。
4)通过计算FBG传感器静载响应数据St(中心波长变化量)与数据样本库S的相关特征向量βT=(c1,c2,…,cN),代入坐标矩阵,计算出待测加载坐标(X′,Y′),则:
(4)
(5)
(X′,Y′)=(Χ0,Υ0)β=![]() ci(xi,yi)
ci(xi,yi)
(6)
为了更直观地显示出复合材料智能蒙皮静载定位的识别精度,本文以实际加载点(X,Y)与理论识别加载点位置(X′,Y′)的欧氏距离d为误差指标,进行定位数据的准确度判断。其中:
d=![]()
(7)
静载定位识别相关算法原理如图2所示。
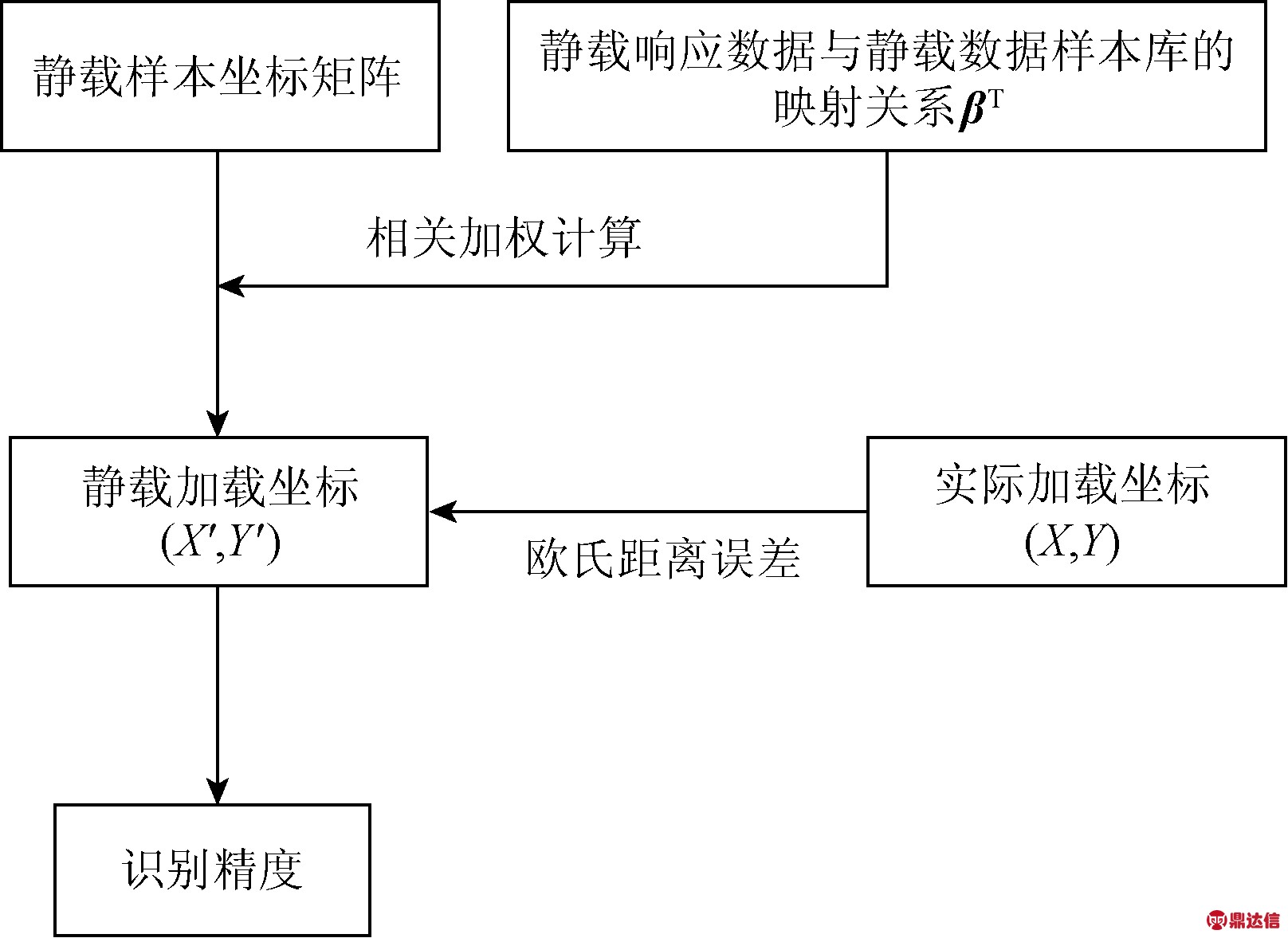
图2 静载定位识别相关算法原理
Fig.2 Schematic diagram of static load location identification algorithm
2 实验系统
复合材料智能蒙皮静载识别实验系统,主要由解调仪、碳纤维复合材料蒙皮、准分布式FBG正交传感阵列和计算机组成。实验中所用CFRP复合材料蒙皮各向性质异性,尺寸为500 mm×500 mm×2 mm,四角固定于光学平台;解调仪内部宽带光源为实验室自行研制的ASE光源,输出功率为13.3 dBm,波段范围为C+L波段(1 525~1 610 nm);光栅解调仪波长范围为1 525~1 570 nm,测量速率最大可达17.2 kHz。实验中光纤光栅传感阵列采用紫外曝光法制作,中心波长范围为1 529~1 559 nm,波长间隔为2 nm。依次刻写16个FBG传感器,FBG传感器的反射率均高于15 dB,栅区长度小于10 mm。采用LabVIEW软件对上位机进行数据采集显示编程,解调仪将FBG传感阵列信号通过以太网口传送到计算机,计算机对FBG传感信号进行数据处理与实时显示,实验系统图如图3所示。
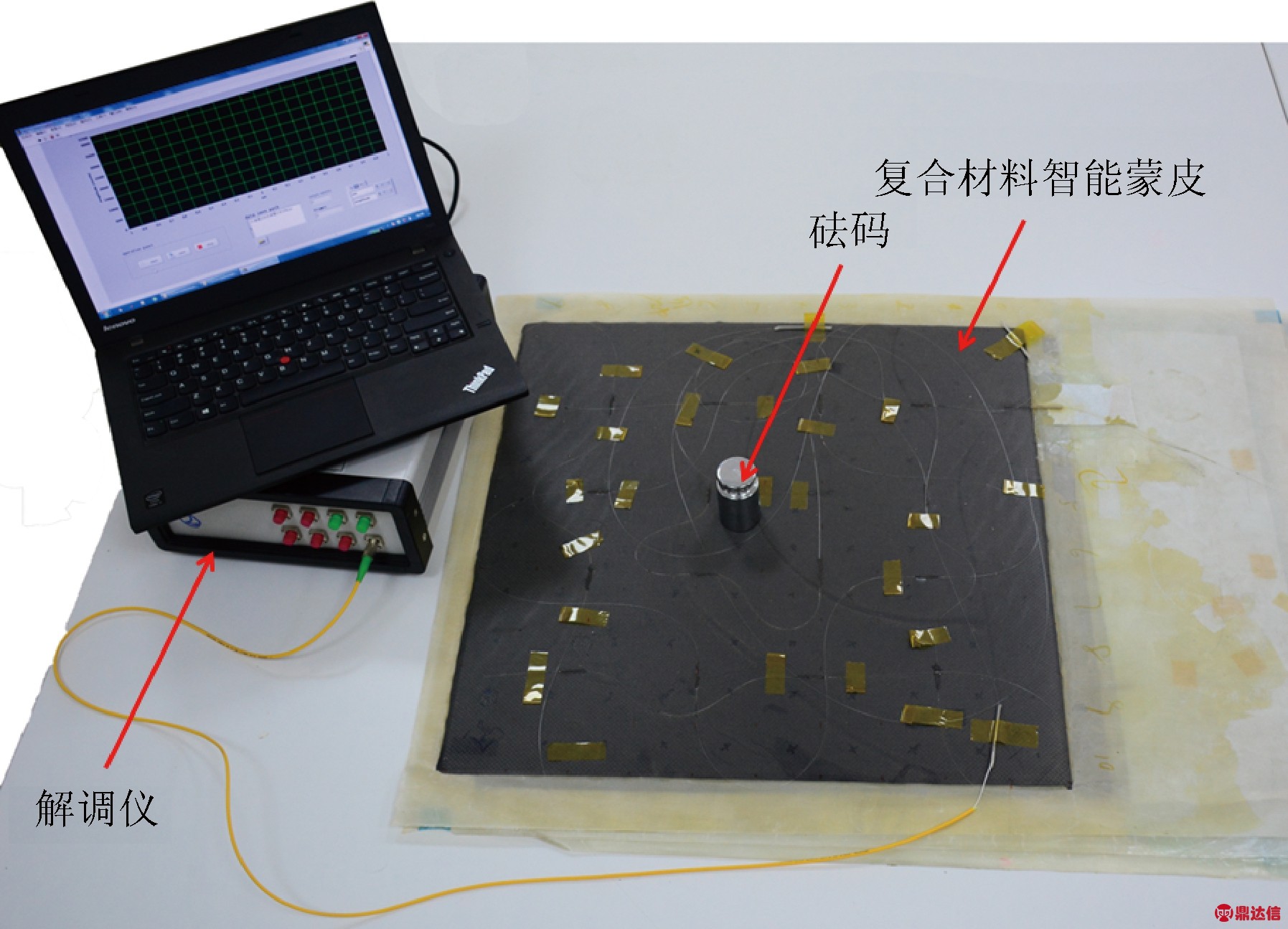
图3 复合材料智能蒙皮静载识别实验系统
Fig.3 Experimental system of smart skin composite material static load identification
3 实验测试与结果分析
将尺寸为500 mm×500 mm×2 mm的CFRP板四角固定于平台上,实验选取已划分好的10×10个单元格区域的中心为加载位置,共计100组FBG数据。得到一个100×16的二维数组,首先将加载质量为500 g加载下的数据作为测试样本,另选取100个单元格的顶点作为实验样本,利用不同FBG的传感相关系数,对所采集的实验数据进行定位识别。每个位置的加载作用效果可以由一个加权系数向量乘以一维中心波长反算得出,然后根据坐标转换,得出相应位置坐标。将实验实际加载坐标与理论计算坐标进行欧氏距离数值比较,进而得出定位识别精度。图4所示为智能蒙皮静载定位识别系统加载位置。
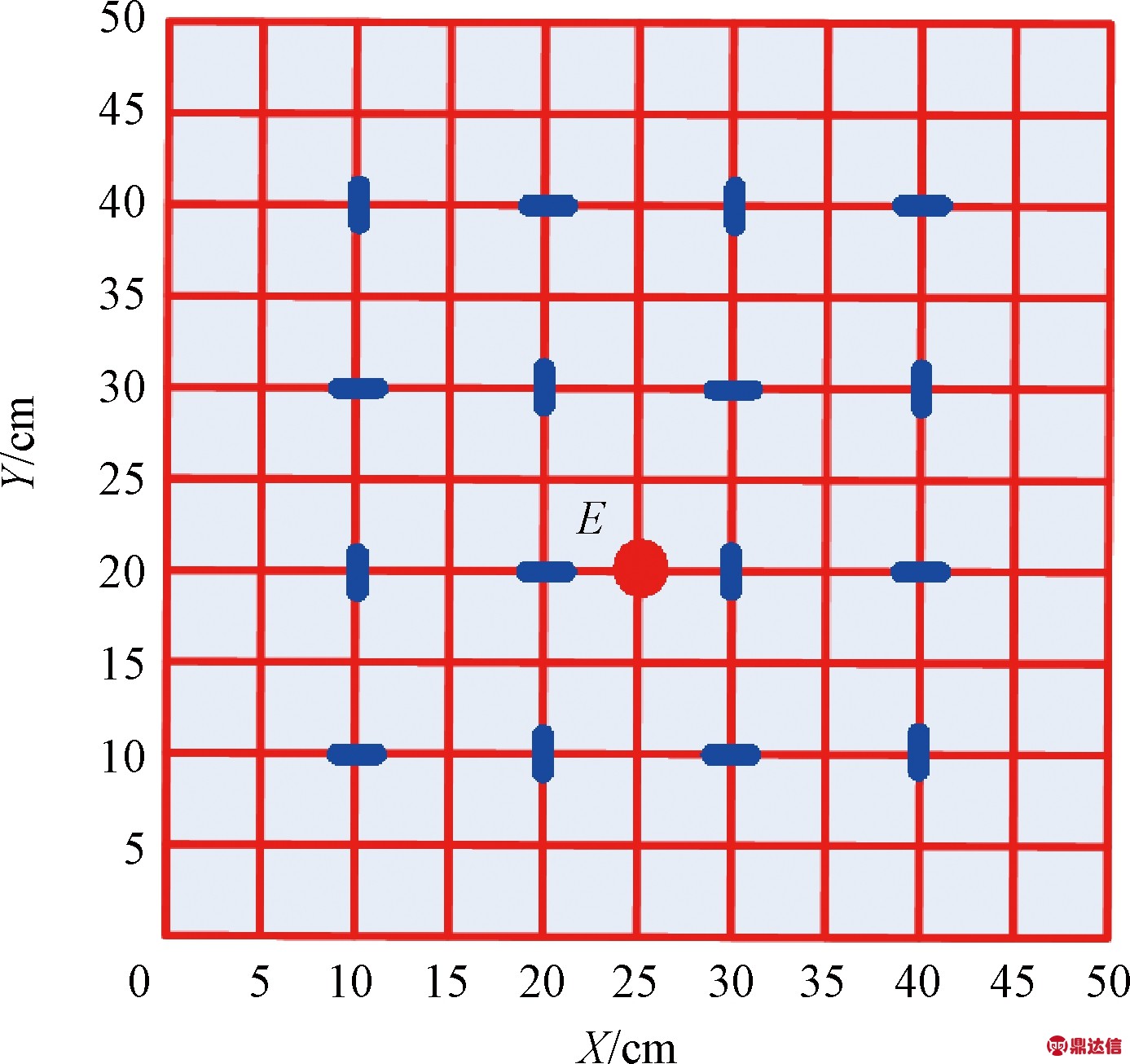
图4 智能蒙皮静载定位识别系统加载位置
Fig.4 Schematic diagram of loading position of smart skin composite material static load location identification system
依次加载图4所示的CFRP板上划分的100个静载位置加载点,提取FBG中心波长静载响应,建立数据样本库S={P1,P2,P3,…,P100}。然后任意选择CFRP板上的一个位置加载点E(250 mm,200 mm),进行500 g砝码静载加载,作为待测位置静载响应数据St。根据静载响应数据与样本库的数据相关性,求得相关特征向量βT=(c1,c2,…,c100),如表1所示。
表1 静载定位识别实验相关特征向量分布表
Table 1 Characteristic vectors distribution of static load location identification experiment
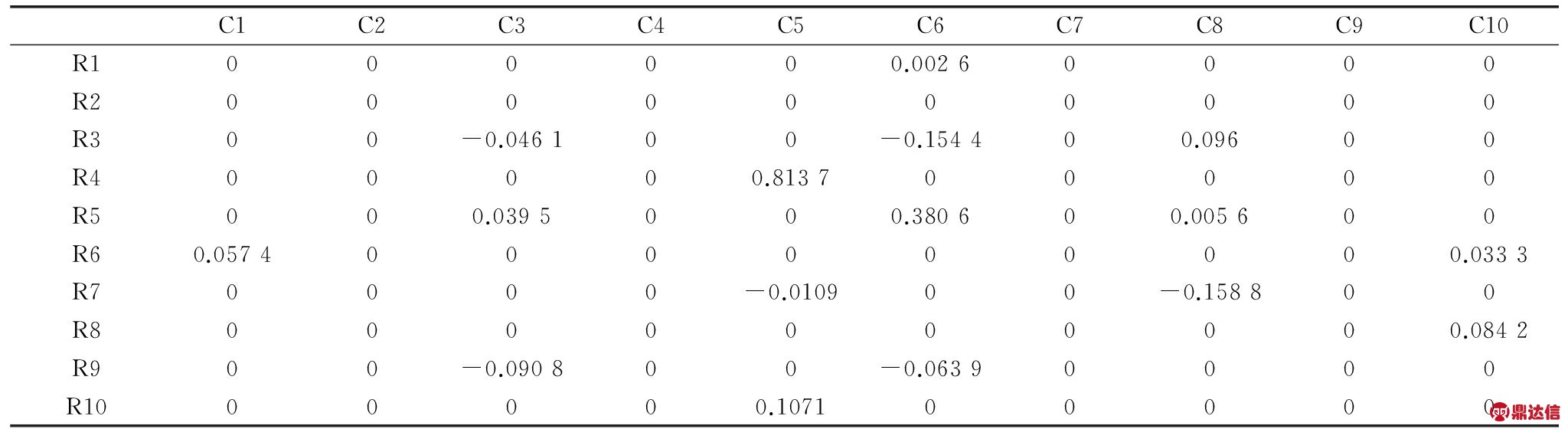
根据前面所述的静载定位识别相关算法,结合之前采集的100组采样数据,识别出加载坐标为(273.7 mm,211.7 mm),精度误差为2.64 cm,由于网格距离为5 cm,可认为该判位结果为有效辨识,在精度范围之内。因此,可以采用FBG中心波长变化量来作为判位信号特征。考虑到实验中靠近CFRP板边缘的区域,一方面由于距离中间布置的FBG传感器距离过大,可能处于盲区导致数据不精确,另一方面由于CFRP板四角被固定,受边缘约束加载时引起的变形量也可能不大,导致采集到的数据样本库中的靠近约束边缘的部分数据不精确,因此又加做第2组静载识别实验。该次实验选取CFRP板中心共6×6个单元格区域作为加载位置,采集到的FBG中心波长变化量作为样本库数据,加载位置如图5所示,中间区域为样本库静载位置加载点。
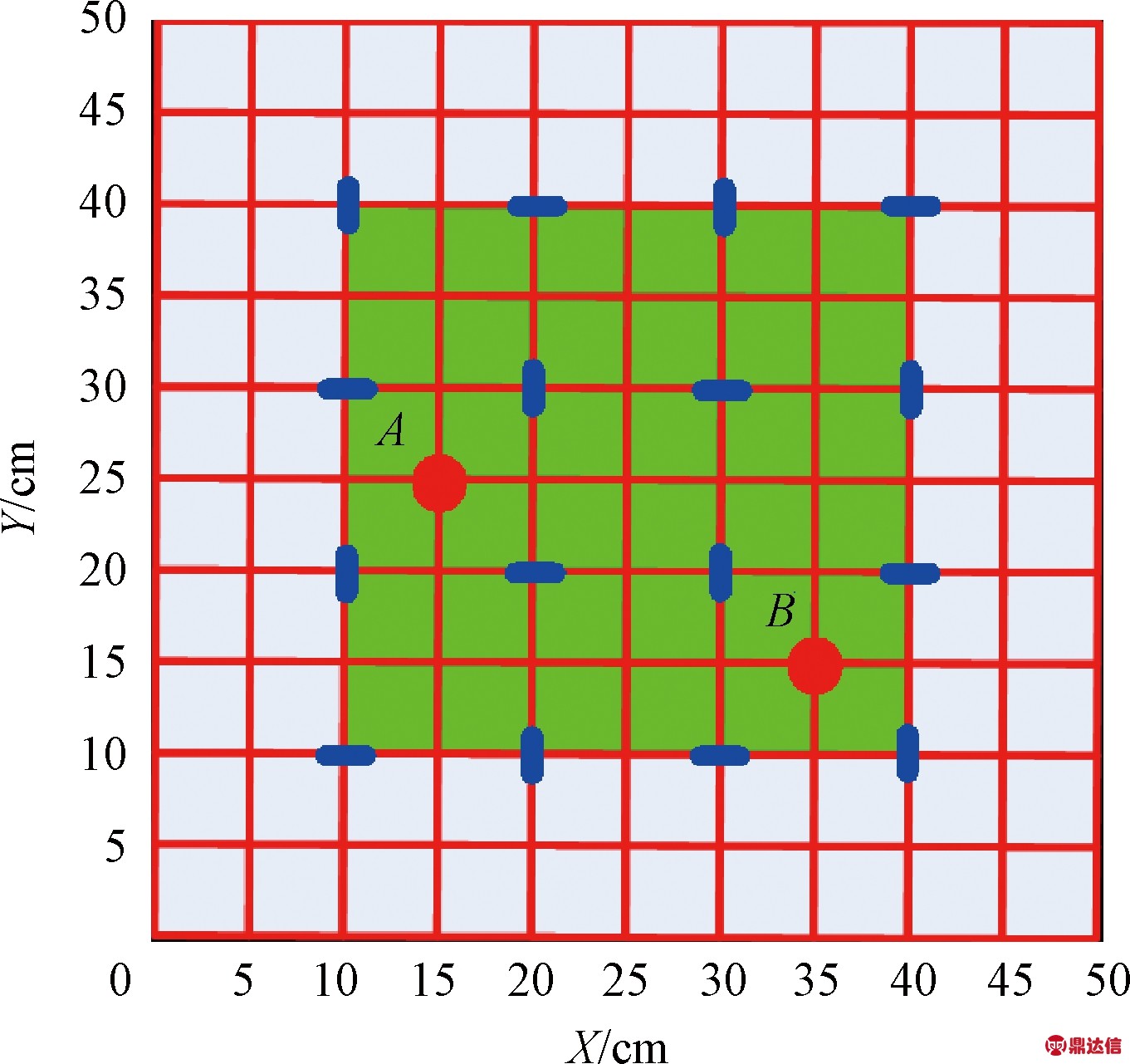
图5 第2次实验加载位置
Fig.5 Schematic diagram of loading location for the second experiment
同理依次加载图5所示的CFRP板中心区域划分的36个静载位置加载点,提取FBG中心波长静载响应,建立数据样本库S={P1,P2,P3,…,P36}。然后选择CFRP板上的两个中心区域位置加载点A(150 mm,250 mm)和B(250 mm,150 mm),进行500 g砝码静载加载,作为待测位置静载响应数据St。根据静载响应数据与样本库的数据相关性,求得相关特征向量,反算出静载坐标,静载定位识别结果如表2所示。
表2 第二次静载定位识别结果
Table 2 The result for the second static load location identification experiment (mm)

实验结果分析表明,第2次实验的识别误差小于第1次的识别误差,识别精度明显提高,这也证明了边缘数据样本不准。基于此重新进行一组实验,选取中间区域的17个交叉点作为待测位置进行识别,识别结果如表3所示。
从表3中可以看出识别结果良好,其中位置7处的识别误差较大,这是因为加载位置处于FBG粘贴位置附近,由于砝码接触底面过大,不得不稍微避开传感光纤,导致结果误差较大,属于有效识别范围。由实验数据计算得出静载识别定位平均误差可达1.948 cm,即定位精度小于2 cm,因此采用该静载识别系统可实现50 mm×50 mm区域的准确定位。与文献[19]相比,本文方法为直接测量,测量范围与定位精度一致,FBG传感链路可同时获得测量值,与文献[19]定位所需时间(2 s)相比较,极大地提高了监测系统的实时性。
表3 第3次实验静载定位识别结果
Table 3 The result for the third static load location identification experiment

4 结 论
本文进行了复合材料智能蒙皮的静载识别实验,用设计的FBG正交对称式传感网络对复合材料板进行静载位置识别,利用相关理论和算法,对加载位置进行识别。其中包括用于复合材料智能蒙皮的静载定位识别理论、光纤光栅安装方式及位置选择、用于智能蒙皮的FBG正交对称式传感网络实验系统搭建以及静载识别实验等环节,实验证明了FBG正交对称式传感网络对CFRP板静载定位识别的有效性和准确性,为进一步研究智能蒙皮复合材料结构健康监测技术提供了有利的实验基础与可靠依据。


