
摘 要:为了准确测量高g 值加速度传感器校准激励脉冲的幅值和持续时间,研究了基于激光多普勒的加速度脉冲测量方法。在分析激光多普勒原理的基础上,设计了以光栅为合作目标的激光测速仪;针对干涉仪输出的存在零点漂移的多普勒信号,提出了基于多项式拟合和希尔伯特变换的局部均值分解法;利用该方法对实测多普勒信号进行了解算,得到了激励加速度脉冲;分析了由干涉仪及其合作目标引起的加速度脉冲的幅值和脉宽测量不确定度。实测数据表明:该方法在包含因子k=2 时幅值测量的扩展不确定度为U=3%,脉宽测量的扩展不确定度为U=4.8%。测量精度符合ISO16063-13(2001)规定的指标。
关键词:横向干涉测量法;校准激励脉冲;幅值;脉宽;高g 值加速度传感器
0 引言
高g 值加速度校准的目的在于确定传感器及其测试系统输出与输入之间的比例关系,校准的方法通常采用瞬态冲击校准法,因此冲击激励脉冲测量的准确性很大程度上决定着校准精度。瞬态校准法根据其力学量来源的不同又可分为相对法和绝对法,其中相对法的激励脉冲是由标准加速度传感器测量的[1],而绝对法则是由激光干涉仪测量的[2]。激光干涉法绝对复现冲击加速度的量值,并将被测加速度直接溯源于激光波长和时间/频率量,原理完善、结果可靠、测量精度最高,目前已成为国际标准ISO16063-13(2001)规定的校准方法。
国外,德国PTB 国家实验室[3]和日本国家计量技术研究室(NRLM)[4]采用激光干涉法对高g 值加速度计的校准激励脉冲进行测量,加速度峰值10 000 g,近年来又研究了这种测量方法所引起的测量误差及其不确定度[5-6]。这些研究都是基于ISO16063-13,采用轴向激光干涉仪,而轴向激光干涉仪所能测量的最大速度有限,日本Graphtec 公司生产的AT7500 型轴向激光测速仪最大测量速度为10 m/s,德国Polytec公司生产的HSV-200 型轴向激光测速仪最大测量速度为30 m/s,对于加速度峰值达105 g 甚至2.0×105 g的加速度计来说,当激励脉冲宽度大于100 μs 时超出了上述轴向干涉仪的测量范围,而速度大于30 m/s的横向干涉仪国外对我国是禁运的。
为此,国内许多科研机构和科研人员对高速激光干涉测量技术及其应用进行了大量的研究。中国工程物理研究院的胡绍楼等研究了基于不同原理的高速激光干涉测试技术[7]。中国科学院长春光学精密机械研究所利用激光外差干涉技术对运动物体的速度进行测量[8],并分析了衍射干涉仪的测试误差[9]。浙江大学研究了基于激光捕获的加速度测量原理[10],长城计量技术研究所、 中北大学等单位在激光干涉测速技术方面也进行了大量的研究,并将该技术应用到高g 值加速度传感器冲击校准中,取得了一定的研究成果。
文中在分析激光多普勒干涉原理的基础上,研究了利用横向激光测速仪测量高g 值加速度传感器校准激励脉冲的方法,提出了针对存在漂移的激光多普勒信号的解算算法,分析了该测量方法所引起的激励加速度幅值和脉宽的测量不确定度。
1 横向激光干涉测量原理
横向激光速度干涉法是华北工学院(现中北大学)王圣佑、曹才芝教授于20世纪90年代发明的[11],如图1所示,砧子上粘贴的反光膜是微球玻璃膜,即苏格兰片。

图1 横向差动多普勒测速仪
Fig.1 Transverse differential Doppler velocimeter
图中,光电倍增管输出的多普勒频移信号Δf 与砧子的运动速度矢量v 及两入射光束间的夹角α 的关系为:要准确测量两入射光束间的夹角α 比较困难,在很大程度上影响着多普勒频率的测量精度。
为了解决α 角的测量问题,将测试仪的合作目标微球玻璃膜改为光栅,如图2所示,其光学原理如图3所示,即入射光沿光栅法线两侧对称入射至光栅表面,入射角分别为i 和-i;衍射光沿法线方向,衍射角为θ=0 时的情况。
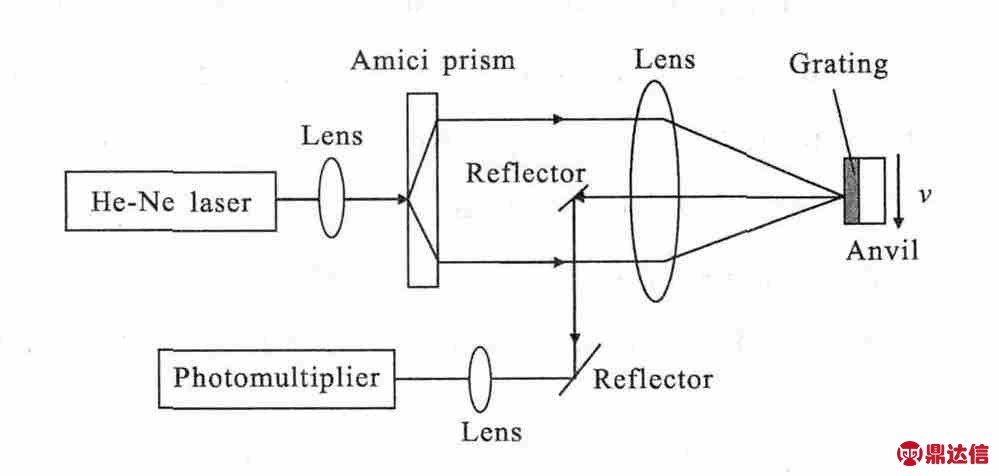
图2 差动式激光干涉仪原理图
Fig.2 Scheme of differential laser velocimeter
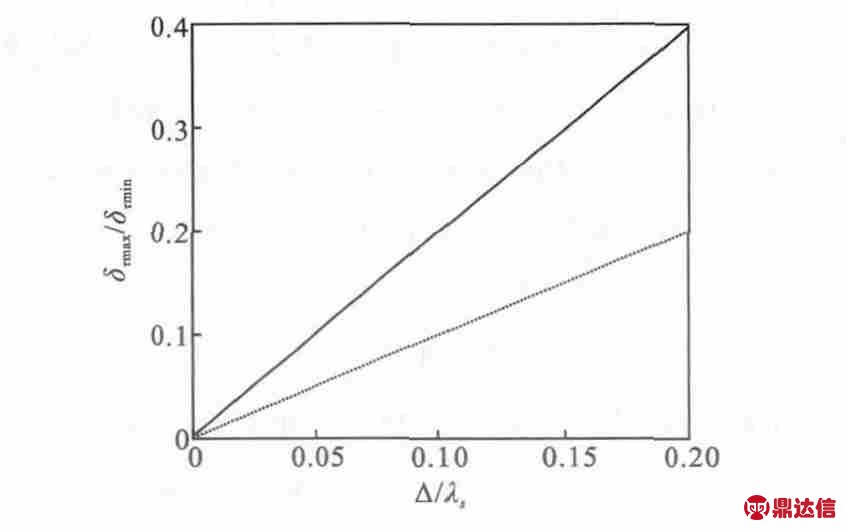
图3 双入射光束光栅的衍射
Fig.3 Grating diffraction of dual incidence light
图2 中光电倍增管接收到的信号实际上两束沿法线两侧的入射光所对应的衍射光产生的干涉信号的叠加。
(1)当入射光和衍射光在法线两侧,即入射角为i,衍射角为(-θ)时,如图4所示。
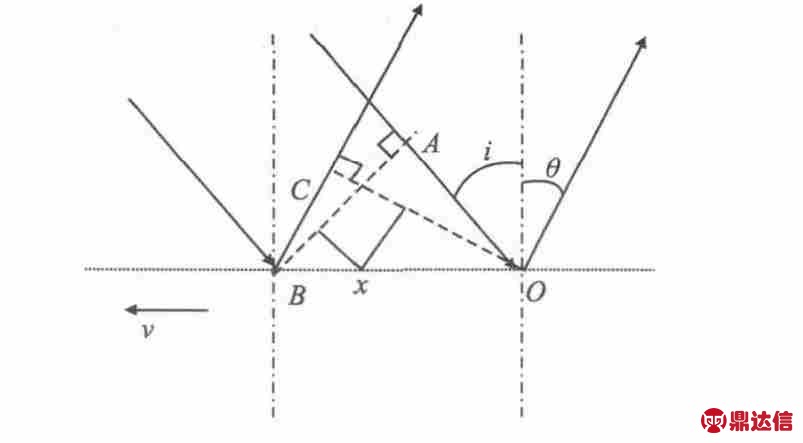
图4 衍射光栅产生多普勒频移原理图
Fig.4 Principle of Doppler frequency shift by diffraction grating
图4 中,入射光波阵面为AB,衍射光波阵面为OC,光栅平面的运动速度为v。
假设在t=0 时刻,x 与O 点重合,则在任意时刻t,x 到O 点的距离为:
入射光波阵面和衍射光波阵面经x 点的光程差长度为:
将公式(1)带入公式(2)并微分,得到光栅运动产生的多普勒频移:
(2)当入射光和衍射光在法线同侧,即入射角为-i,衍射角为-θ 时,同理可得由于光栅运动产生的多普勒频移:
(3)当两入射光沿法线两侧对称入射至光栅表面,即入射角分别为i 和-i,衍射角为-θ 时,两衍射光干涉后产生的光强将叠加。根据光束的振动方程可以得到,光电倍增管所能检测到的信号
式中:A 为光波振幅;φ01、φ02 为两入射光的初相位,![]() 为多普勒频移信号。
为多普勒频移信号。
令
则光栅运动速度为:
当光栅运动时,每一级衍射光都会产生的多普勒频移,根据激光干涉理论和光栅方程,可以导出:
将公式(8)代入公式(7),有:
式中:d 为光栅常数,m1、m2 分别为干涉仪中两路干涉光束所采用的衍射级。
对公式(9)求导,可得到光栅的加速度:
式中:多普勒频率Δf 可利用过零点法或相位求导法由多普勒信号直接求得。
2 多普勒信号的解算
在实际测量中,干涉仪光学系统(含光栅)会受到子弹碰撞Hopkinson 杆时所产生的随机振动的影响,干涉仪电学系统会受到随机电脉冲的干扰,导致实测的多普勒信号通常为非平稳或非线性信号,因此在利用公式(10)求解激励加速度脉冲前需要实测的多普勒信号进行处理。为此,依据该信号在时域中固有的特征,提出了一种新的局部均值分解法。具体过程如下:
(1)对于任意多普勒信号x(t),采用3 次多项式拟合,计算局部均值函数m(t);
(2)利用希尔伯特变换,计算包络估计函数e(t),并将其归一化,得到:
(3)将局部均值函数m(t)从原始信号a(t)中分离出来,得到:
(4)用h(t)除以归一化的包络估计函数a(t),得到:
通过上述处理后得到的函数s(t)实际上是一个纯调频信号,即它的包络估计函数e(t)=1,满足利用希尔伯特变换进行时频分析的条件。因此,利用希尔伯特变换,对干涉仪输出的多普勒信号进行解析,得到调制相位信号:
式中:HT[·]为希尔伯特变换。
将公式(14)乘以灵敏度系数kv,求得位移信号:
对公式(15)求二阶导数,即可得到激励脉冲加速度信号:
3 测量不确定度的分析
利用图2 中的激光干涉仪对公式(16)所给出的激励脉冲加速度测量时,引起测量不确定度的主要因素包括激光干涉仪的不确定度和光栅及其粘贴体共同引起的不确定度。
激光干涉仪的不确定度通常在检定证书中给出,测量不确定度U=3%,包含因子k=2。下面主要分析由光栅及其粘贴体共同引起的不确定度。光栅是粘贴在被校准体上的,当应力脉冲上升沿比较陡时,很难保证光栅栅距保持不变,而且光栅粘贴位置通常离传感器的安装面有一定距离,如图5所示,严格意义上讲两处加速度并不相同。
图中,激光测速仪测得的信号为靠近光栅中点处的加速度,而加速度传感器感受到的信号为加速度计安装座右端面处的加速度,激励信号测量点与加速度计安装座右端面的距离为Δ/2。假设激励加速度脉冲为升余弦信号,根据应力波在枝干中的传播理论,可以得到两种理想极限情况下激光测速仪的测量不确定度。
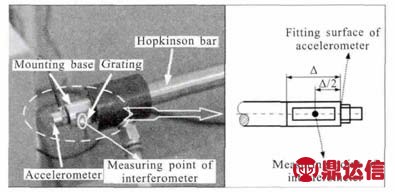
图5 横向激光干涉仪测量点
Fig.5 Measuring point in lateral interferometry
3.1 幅值测量不确定度
(1)当光栅伴随加速度计安装座作同步运动时,激励加速度脉冲的幅值误差为:
式中:Δ 为加速度计安装座的长度;λs 为应力脉冲前沿行程。
(2)当光栅伴随加速度计安装座作刚体运动时,激励加速度脉冲的幅值误差为:
在实际冲击过程中,光栅和加速度计安装座的相对运动情况介于上述两种情况之间,联合公式(17)和(18),可以得到幅值测量误差限为:
由光栅和加速度计安装座引起的幅值测量误差不会超出上述误差限,如图6所示。
图6 光栅和加速度计安装座引起的幅值测量误差
Fig.6 Measurement error of pulse amplitude from grating and accelerometer mounted base
按均匀分布考虑,由此项引起的幅值测量不确定度为![]() 。
。
3.2 脉宽测量不确定度
当光栅伴随加速度计安装座作同步运动时,激励加速度脉冲的脉宽误差为:
当光栅伴随加速度计安装座作刚体运动时,激励加速度脉冲的脉宽误差为:
同理,由公式(20)和(21),可以得到脉宽测量误差限为:
由光栅和加速度计安装座引起的脉宽测量误差均不会超出上述误差限,如图7所示。
图7 光栅和加速度计安装座引起的脉宽测量误差
Fig.7 Measurement error of pulse duration from grating and accelerometer mounted base
按均匀分布考虑,由此项引起的脉宽测量不确定度为![]() 。
。
从图6 和7 中可以看出,当加速度计安装座恒定时,应力脉冲前沿越陡,λs 越小,Δ/λs 越大,光栅和加速度计安装座引起的幅值和脉宽的测量不确定度就越大。
4 实测数据处理
将图2所示原理的干涉仪应用在图8所示的Hopkinson 杆校准系统中,对丹麦B&K 公司的8309型高g 值压电加速度传感器进行了校准测试,该传感器量程为100 000 g。
图9 是激光干涉仪输出的原始多普勒信号。
采用2.3 中所提到的局部均值分解法可以得到一个纯调频信号s(t),图10 是s(t)信号在70~110 ms之间的展开图。
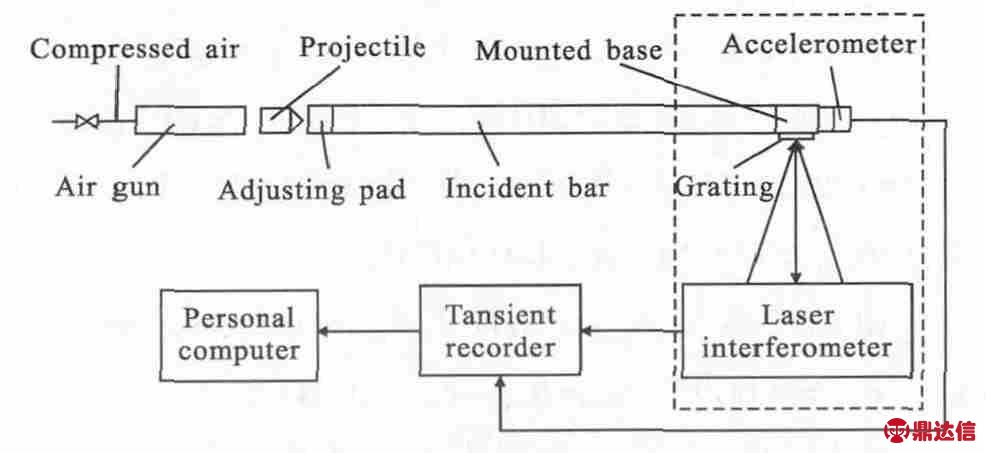
图8 Hopkinson 杆校准系统原理图
Fig.8 Block diagram of Hopkinson bar calibration system
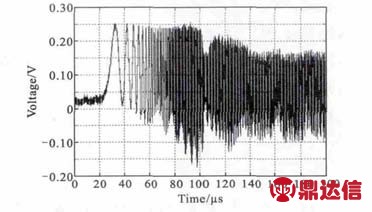
图9 有零漂的激光多普勒信号
Fig.9 Doppler signal with zero shift from interferometer
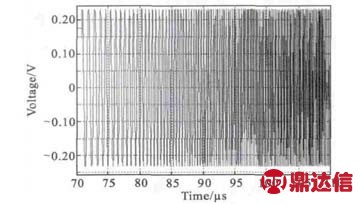
图10 纯调频信号展开图
Fig.10 Enlarge figure of simple frequency modulation signal
图11 是经s(t)解算得到的激励加速度脉冲,激励脉冲的幅值为56 000 g,脉宽为122 μs。
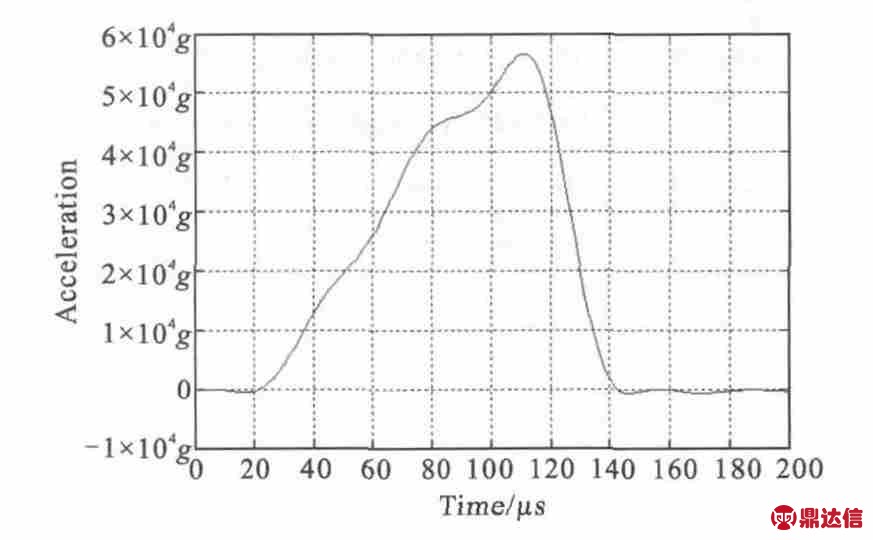
图11 激励加速度脉冲
Fig.11 Exciting acceleration pulse from Doppler signal
已知图8 中加速度计安装座的长度Δ=0.026 m;应力脉冲前沿行程![]() ,其中钛合金杆的Young′s 弹性模量E=120 GPa,密度ρ=4.5×103kg/m3。当τ=122 μs 时,λs=0.63 m,则Δ/λs=0.0412 7,由图6可知|δamin|=0.002 1,|δamax|=0.002 8。
,其中钛合金杆的Young′s 弹性模量E=120 GPa,密度ρ=4.5×103kg/m3。当τ=122 μs 时,λs=0.63 m,则Δ/λs=0.0412 7,由图6可知|δamin|=0.002 1,|δamax|=0.002 8。
由图7 可知δτmin=0.041 2,δτmax=0.082 4,则δalim=δamax-δamin=0.000 7,δτlim=δτmax-δτmin=0.041 2。
按均匀分布,可分别求得由光栅和加速度计安装座引起的幅值和脉宽的测量不确定度分别为ua=0.04%,uτ=2.38%
考虑到干涉仪自身的测量不确定度U=3%,则对脉宽为122 μs 的激励脉冲进行测量时,由干涉仪系统引起的幅值的扩展不确定度为U=3%,包含因子k=2;脉宽的扩展不确定度为U=4.8%,包含因子k=2。
5 结论
文中研究了一种高g 值加速度校准脉冲的测量方法,该方法采用差动式激光多普勒原理,用衍射光栅作合作目标,可绝对复现冲击加速度的量值。采用基于多项式拟合和希尔伯特变换的局部均值分解法处理存在零点漂移的激光多普勒信号,得到了可定量分析的激励加速度脉冲,为高g 值加速度传感器冲击灵敏度和频率响应特性的校准提供了必要的技术手段。此外,该方法更适用于轴向干涉仪无法测量的基于气体炮原理的高g 值加速度测试系统应用环境下的校准及其冲击可靠性研究。


