
摘 要:针对我国对海水温度剖面的测量需求,在分析已有方法优缺点的基础上提出了一种新的方法——光纤温度剖面连续测量系统。此测量系统以光纤光栅传感器为测量单元,采用波分复用的方式串接在一起组成船载拖曳链,再通过甲板上的解调终端实时显示所测物理参量,从而实现分布式实时测量。这种方法能够以低成本快速高效获得高分辨率的海水温度剖面分布情况,为海洋探测提供丰富有效的数据。课题组设计制作了拖曳链系统的甲板机及60 m长的拖曳链,并在青岛近海进行了拖曳海试,实时获取了试验数据,达到了预期效果。
关键词:光纤布拉格光栅;温度测量;拖曳链;直读;比测
海水温度是海洋最基本的物理参数,观测海水温度随深度的变化可以为海洋科学研究提供基本的数据资料,具有广泛的应用价值[1-2]。当前,获取海水温度剖面主要有如下形式,且各有利弊。首先是最常规的直读式测量,该方法利用调查船出海进行定点的直读式CTD[3-5]测量,该方法需要停船测量,测量精度高但消耗船时较多;其次是投弃式温深剖面仪XBT[6-7],该方法不需要停船即可快速获取温度剖面,节约了船时,但该类传感器一般精度低,且传感器作为一次性设备大量的消耗,使用费用高;再次是潜标或浮标型[8-9],该方法可以长期获取数据,但只是获取某一测点长期的数据,且长期的测量数据存在意外完全丢失的风险;最新的测试方法是拖曳式传感器[10-11],如MVP[12-13]、UCTD等,但该方法仅有一个温度传感器,获取的温度剖面空间分辨率不高。
本文提供一种随船运动测量的拖曳温度链系统,该系统主要采用光纤传感器技术,发挥光纤传感器本征绝缘、成本低廉、便于规模组阵、湿端无电无功耗等特点。该系统由光纤光栅温度传感器采用波分复用[14]的方式串接在一起实现分布式测量[15-16],可以随船运动实时获取高时空分辨率的温度剖面,从而规避上述各温度剖面获取方法的弊端,高效、快捷、低成本地获取高分辨率温度剖面。
本文研制了拖曳链系统的甲板机及60 m长的拖曳链,并在青岛近海进行了拖曳海试,实时获取了试验数据,取得预期成果。
1 系统构成
1.1 系统总体构成
整个温度拖曳链系统示意图如图1所示,该系统包含甲板单元和水下单元两大部分。其中水下单元是系统的核心,包含8支光纤温度传感器,其中光纤温度传感器以5 m的间距等间隔方式串联成链,并在底部悬挂铅鱼以降低缆深比;甲板单元主要有绞盘、解调终端等,其作用分别是温度链的收纳释放、信号解调及显示。在船舶行进中,系统可拖曳温度链实现温度实时测量,得到一定深度水域的温度剖面分布情况。
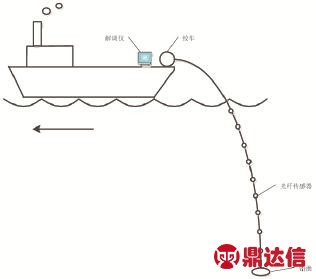
图1 光纤温度剖面连续测量系统示意图
1.2 光纤温度传感器
光纤光栅温度传感器是利用光纤光栅的中心波长会受外界环境参量调制而研制的。光纤温度传感器进行了温度增敏、压力减敏的相关封装处理,光纤温度传感器的标定按照GB/T 23246-2009进行,藉由恒温水浴槽完成。测试完成后通过建立二次函数模型y=ax2+bx+c来描述温度与波长的一一对应关系,再根据Levenberg-Marquardt算法求出a,b,c的值并绘制拟合曲线。实践表明,通过这种方法可以提高标定的准确性。其中两支光纤温度传感器标定结果如图2所示(标准温度传感器的型号为SBE56):
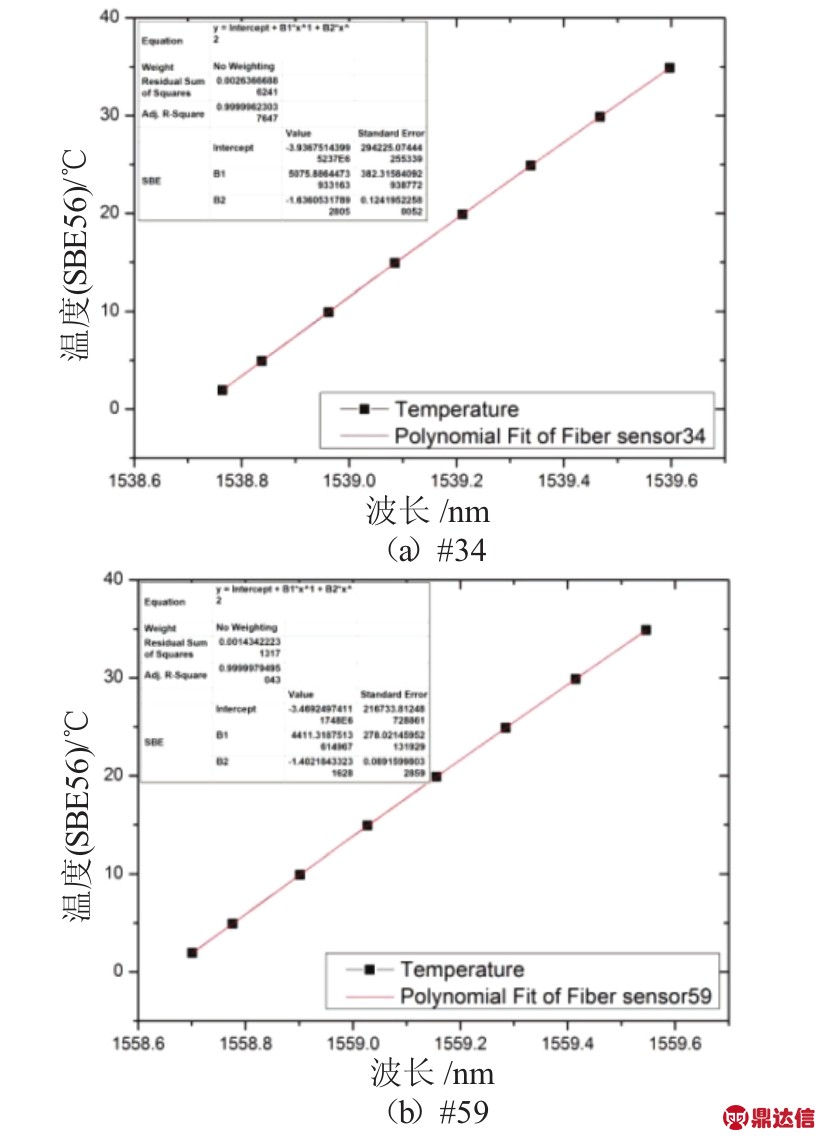
图2 光纤温度传感器标定数据处理结果
试验中所使用的光纤温度传感器通过特殊设计封装消除了海水压力以及外界应力变化对其的影响,具有良好的抗震、抗颤能力。同时,通过采用特殊合金对传感器进行铠装保护,使得传感器的耐腐蚀能力得到显著提高,满足长期海上测量的要求。光纤温度传感器灵敏度为27 pm/℃,响应时间为180 ms,静态标定精度达到0.01℃,达到国家二级技术指标,在用于海水温度测量的光纤传感器中处于领先水平。光纤温度传感器实物如图3所示。

图3 光纤温度传感器实物图
所有的光纤传感器的系数都可以通过上述方法确定,然后将这些对应关系式存储到数据处理系统。在实际测量时通过光纤温度传感器反馈的中心波长就可以直接读出温度。在标定过程中通过筛选示值误差小、稳定性能好的传感器组建阵列,进而提高系统测量的准确性。
1.3 甲板单元
试验中甲板上的光纤光栅解调仪[17]作为本套测量系统的解调终端,要解调出光纤传感器所测物理量参数,加以显示并存储。此光纤光栅解调仪解调精度为1 pm,分辨率为0.1 pm,采样率为1 Hz,样机实物如图4。
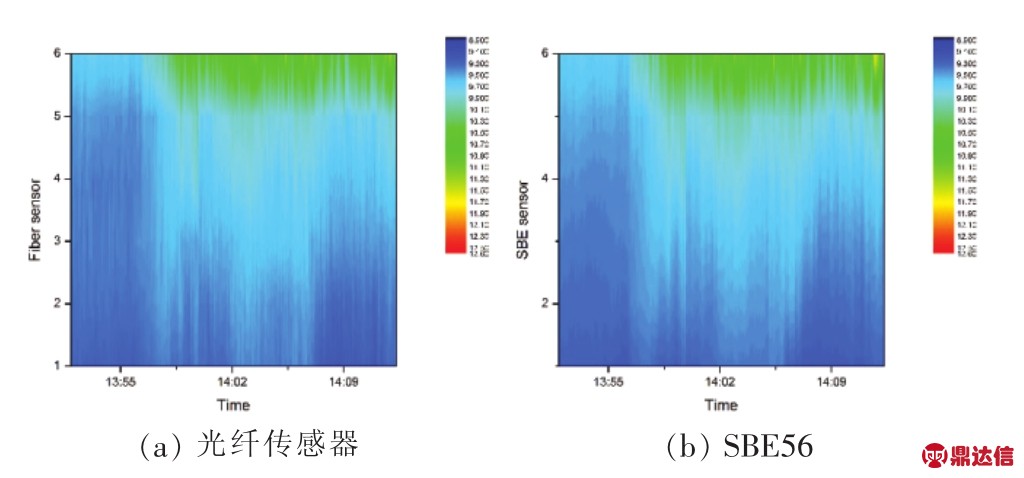
图4 解调仪样机实物图
且部分技术指标优于国际同类机型(美国MOI SM125),机器噪声图对比如图5所示。
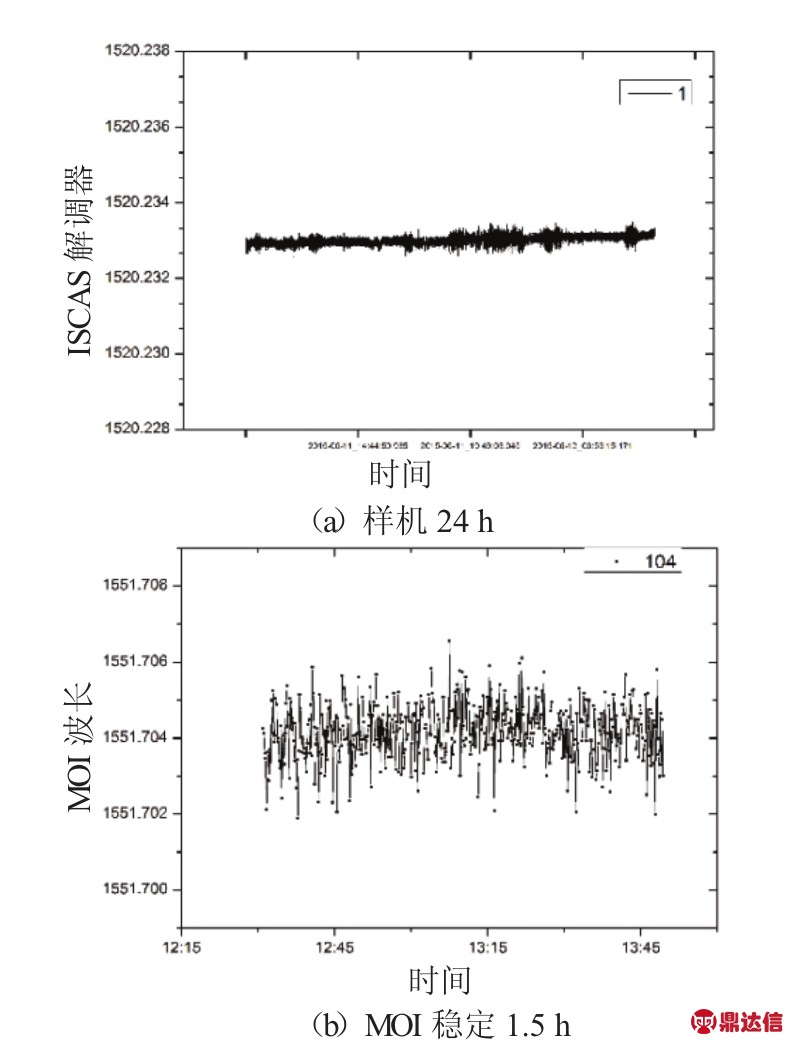
图5 研制解调仪样机24 h测试结果同MOI稳定1.5 h对比图
此解调仪多次圆满完成标定测试任务,可长期稳定工作,满足长期海上测试任务的要求。
2 试验与数据分析
于2015年4月在青岛近海进行了传感链的拖曳海试试验。由于试验海域深度较浅,所以仅有最下边40 m拖曳链入水工作(包含6只传感器),海试过程拖曳速度为5 kn,7 kn,9 kn。试验过程中为了确定拖曳链上各传感器工作时的可靠性,在每个光纤传感器附近均绑有SBE56温度传感器以作为实验比对参照。

图6 实验海域(左)与现场(中)、比对传感器SBE56安装方式(右)

图7 拖曳中的传感链
图8是两对光纤温度传感器同SBE56温度传感器在拖曳过程中的测温曲线(横轴为时间,纵轴为温度值):
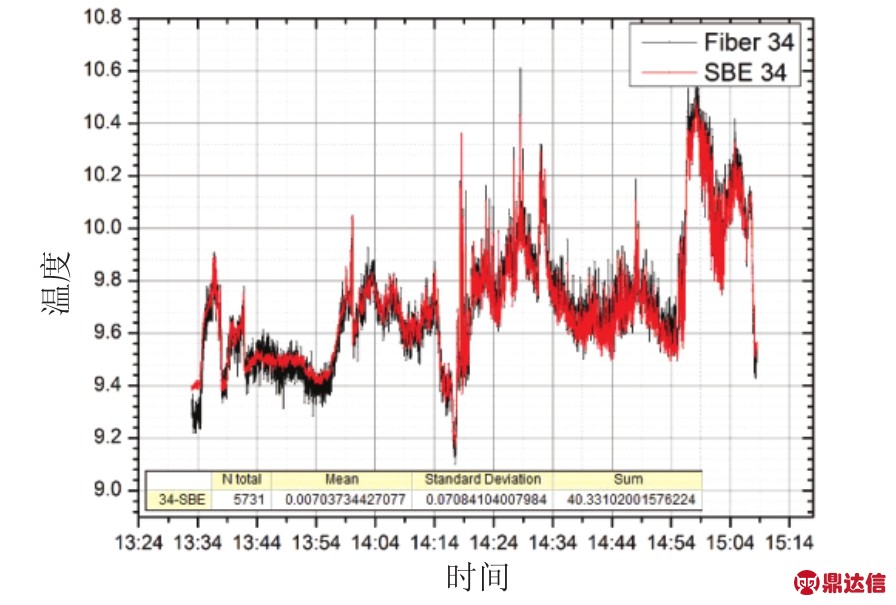
图8 #34光纤温度传感器同相应SBE56传感器在拖曳过程中的比测图
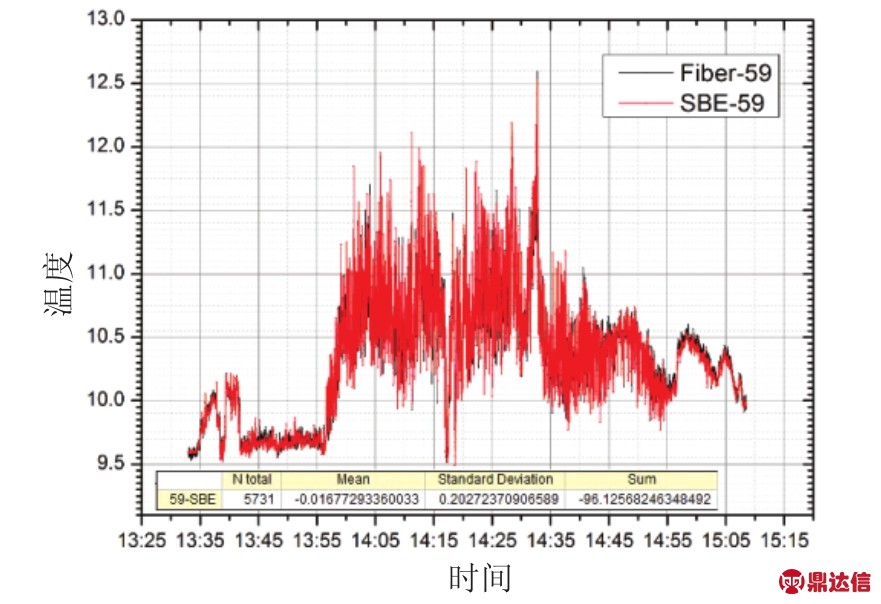
图9 #59光纤温度传感器同相应SBE56传感器在拖曳过程中的比测图
图8同时给出了#34光纤温度传感器与对应比测传感器SBE56测量误差的数据分析结果,其误差平均值为0.007,标准差为0.070 8。图9同时也给出了#59光纤温度传感器测量误差的数据分析结果,其误差平均值为-0.016 8,标准差为0.202 7。由图8~图9可知,光纤温度传感器在拖曳过程中温度测量准确,与SBE56温度传感器测得的温度值一致性较强。温度传感器所测温度值具有明显的阶段性,且变化恰好与航速改变时间一致,这说明航速改变时拖曳链在水下姿态也发生改变。#34光纤温度传感器在航速稳定时温度发生突变,这可能是由于此深度层洋流交错汇聚导致此层水温在不同地方变化较大。
航速不同时,拖曳链姿态不同,传感器所处深度不同,所以将不同航速时的温度分布情况分开绘图更具有可比性,同时这样也能观察到更多的细节。
海试过程获得的数据如图10~图12所示(横轴为时间,纵轴为6个温度传感器的相对位置):
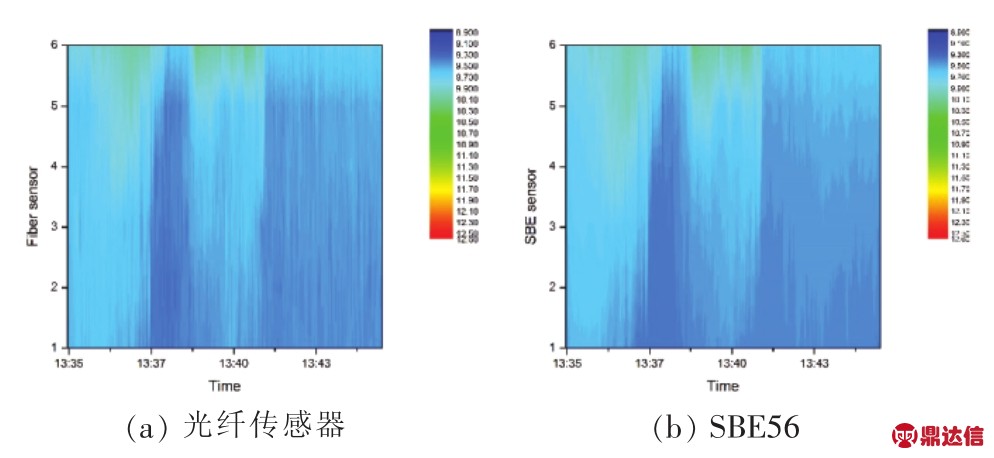
图10 5 kn船速时的温度分布图对比
图11 7 kn船速时光的温度分布图对比
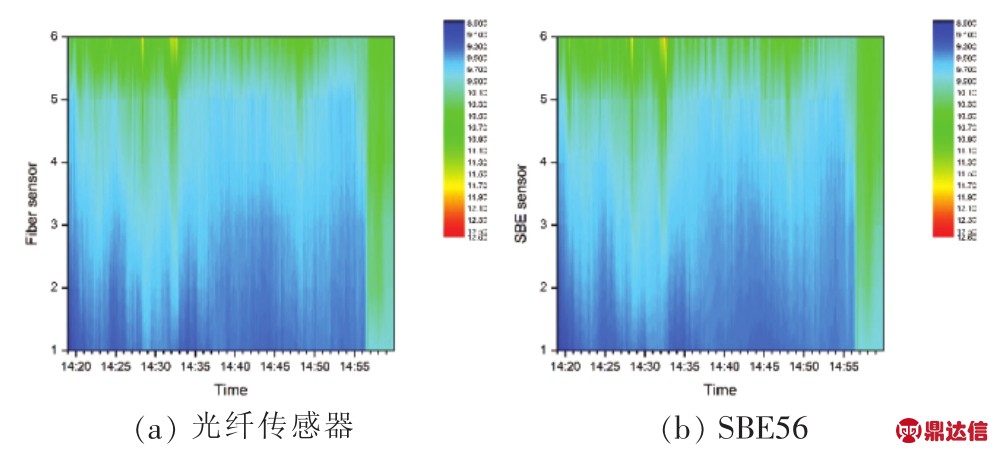
图12 9 kn船速时的温度分布图对比
从温度分布图中可以看出,不同深度海水温度不同,相同深度不同地方的海水温度不同,这可能是由于本片海域海水流向复杂、互相交叠汇聚导致。图中不少时刻出现了温度跃变,可见该拖曳链可及时响应温度变化,能够准确测量发现温度断层。根据温度分布图的对比可以看出,拖曳链上每一处光纤温度传感器所测得的温度值与参照温度传感器SBE56测得的温度值一致性都比较好,从而验证了光纤温度拖曳链整体性能的可靠性,证明了光纤温度拖曳链具有实用价值。
3 讨论
3.1 试验结果
通过本次海上拖曳试验,获得了海上试验宝贵的数据资料,验证了光纤温度剖面连续测量系统的实际应用效果,试验表明光纤温度拖曳链技术指标达到了设计要求。
在整个试验过程中,在恶劣海况下甲板晃动和振动以及大风、盐雾、暴晒等恶劣环境下,光纤温度剖面拖曳测量系统整体没有发生严重故障,表明系统具有一定的可靠性。
3.2 存在的问题
在海上试验中,发现了光纤温度剖面连续测量系统还存在如下问题:
(1)甲板设备在快捷安装、操作方便和全天候工作等方面需要改进提高,以满足实际使用中对光纤温度剖面连续测量系统快捷、可靠的要求;
(2)海试拖曳链系统长度较短,导致采集到的数据量有限;
(3)试验中没有温度传感器准确的深度信息,只有相对位置,无法将所测得的温度信息与深度联系起来。
因此,需要从以下方面进一步完善:
(1)光纤温度剖面连续测量系统甲板设备小型化、自动化和优化设计改进;
(2)拖曳链系统关键技术已掌握,下次试验可采取主干缆连接方式将数段拖曳链连接在一起,以延长拖曳系统长度;
(3)选择较深海域进行试验,使得试验设备能够充分发挥效果,得到更好的试验结果;
(4)下次试验加入压力传感器,以获取温度传感器深度的准确数值,提高所测温度信息的实用价值。
4 结语
从本次海上试验来看,光纤温度剖面连续测量系统适用于在船舶走航时快速、经济地获取高水平密度、较精细的上层海洋温度剖面数据资料。由于光纤温度剖面连续测量系统具有快速、经济、稳定、安全、适用性强的特点,作为新型海洋调查设备,在研究海洋锋面、黑潮等领域有广泛的应用价值。


