
摘要:考虑激光脉冲啁啾放大与压缩技术要求脉冲压缩光栅有较低的像差,设计并制作了一个小形变变形镜来补偿大口径光栅基板加工残余的亚微米级静态像差对光栅波像差的影响。 该变形镜有效口径为80 mm、厚度为5 mm,包含19个分立式压电促动器。采用干涉仪测量得到各个促动器的响应函数,构建了变形镜的刚度矩阵;采用最小二乘法求解出获得目标面形时各个促动器上所需施加的控制电压;通过整体优化和局部优化的结合,使变形镜的目标面形得到了有效控制。应用该变形镜构建了主动式全息光学记录系统,并选用具有较大像差的基板开展了光栅像差补偿实验。实验显示,对残余像差为~0.93λ的基板,采用变形镜后制作出了残余波面PV可达0.14λ(@ 633 nm)的脉冲压缩光栅,验证了小形变变形镜在光栅基底像差补偿上的有效性。
关 键 词:变形镜;全息光栅;脉冲压缩光栅;压电促动器;响应函数;像差补偿
1 引 言
激光脉冲啁啾放大与压缩(Chip Pulse Amplification-CPA)技术是产生高强度激光的一个重要手段,其核心元件之一是脉冲压缩光栅(Pulse Compression Grating,PCG)。为了获得尽可能高的聚焦功率密度,聚焦光斑要尽可能小,这对光学系统的像差提出了很高的要求。作为高能激光系统中后级光学系统的重要元件,PCG的衍射波像差直接影响聚焦光斑的大小。随着高能激光系统输出能量的不断增加,PCG的口径不断增大,制作技术难度也越来越大,PCG的技术指标,尤其是低衍射像差指标(小于0.25λ甚至更低)的实现会愈加困难[1]。
全息技术是目前制作PCG的重要手段,利用全息技术制作的PCG,其衍射像差主要由全息记录光学系统的像差以及光栅基板的面形决定。尤其对于多层介质膜反射式PCG,其基板上镀有数十层高反射膜,受限于光学冷加工及镀膜工艺现有的技术能力,光栅基板面形不可避免地存在残余像差。
作为一种研究最早、应用最广的波前校正器,连续镜面、分立促动器的变形镜可有效矫正低阶像差和一些高阶像差,具有校正动态范围大、技术成熟度高等优点[2-6]。将变形镜运用到全息记录光学系统中,通过在记录波面中引入一定的位相来补偿光栅基板的残余像差,从而获得低像差PCG具有可行性和实际意义。本文根据实际加工的光栅基板的小像差特点,设计制作了有效口径为80 mm、镜面厚度为5 mm的19单元变形反射镜,以产生离焦、像散和彗差等形式的镜面面形,对变形镜的小像差校正能力进行了实验研究。应用该变形镜构建了主动式全息光学记录系统,开展了相应的像差校正实验,在有像差光栅基板上实现了低像差全息光栅的制作。
2 小形变量变形镜的设计及制作
为了获得低波像差,采用PV优于0.25λ的非球面全息记录光学系统制作PCG;而大口径光栅基板在加工和镀膜后的残余像差仍在~1λ量级,因此,本变形镜的设计目标是获得小形变量,以补偿光栅基板的残余像差。
变形镜通常由基座、促动器、镜面3个基本部分构成。变形镜在工作过程中通过固定基座和改变压电陶瓷促动器电压使镜面产生不同的形变,从而构成所需波前。考虑到全息记录对稳定性的要求,变形镜的基材选用热膨胀系数优良的熔石英材料。变形镜的变形能力在亚微米量级,所需校正力较小;径厚比较小(20),一方面可以降低支撑的难度,保证良好的稳定性,另一方面可以减小促动器的类高斯面形响应函数所包含中高阶像差对数值求解的影响[5]。
常见的促动器排布方式有方形、圆形和正六边。其中,圆形排布的剩余残差小于方形排布;正六边形排布中相邻促动器间的影响与圆形排布相似,镜面受力均匀,易于实现对小像差的精密控制,因此这里采用促动器正六边形的排布方式制作变形镜。
图1为所制作的口径为100 mm、镜面厚度为5 mm的19单元小像差变形镜及19个促动器的实际排列情况。其中,促动器采用外形尺寸为5 mm×5 mm×18 mm、标称位移为18 μm的国产压电陶瓷促动器,促动器与镜面后表面采用环氧胶胶合联结。
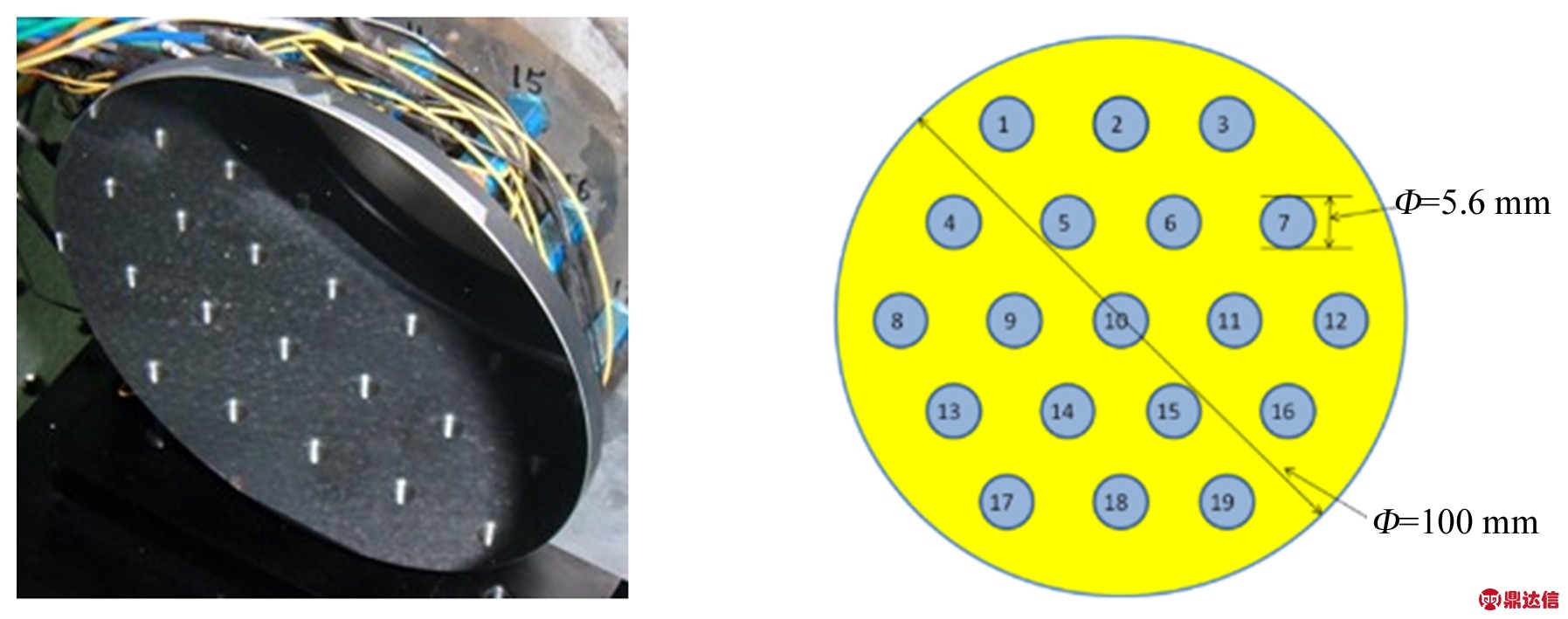
图1 19单元小形变变形反射镜及其促动器的排列
Fig.1 Deformable mirror with 19 actuators and their alignment
3 小形变变形镜的面形控制
3.1 变形镜的静态稳定性
设计制作的小形变变形镜用于长时间全息记录,因而变形镜应具有良好的稳定性。实验测试在设计的径厚比下变形镜的静态稳定性(图2(a)~2(d))。初始镜面PV<60 nm,RMS<30 nm,变形镜放置20,40,60 min时,对变形镜进行测试。表1列出了测试所得面形的峰值(Peak-to-Valley,PV)和均方根值(Root Mean Square,RMS)。
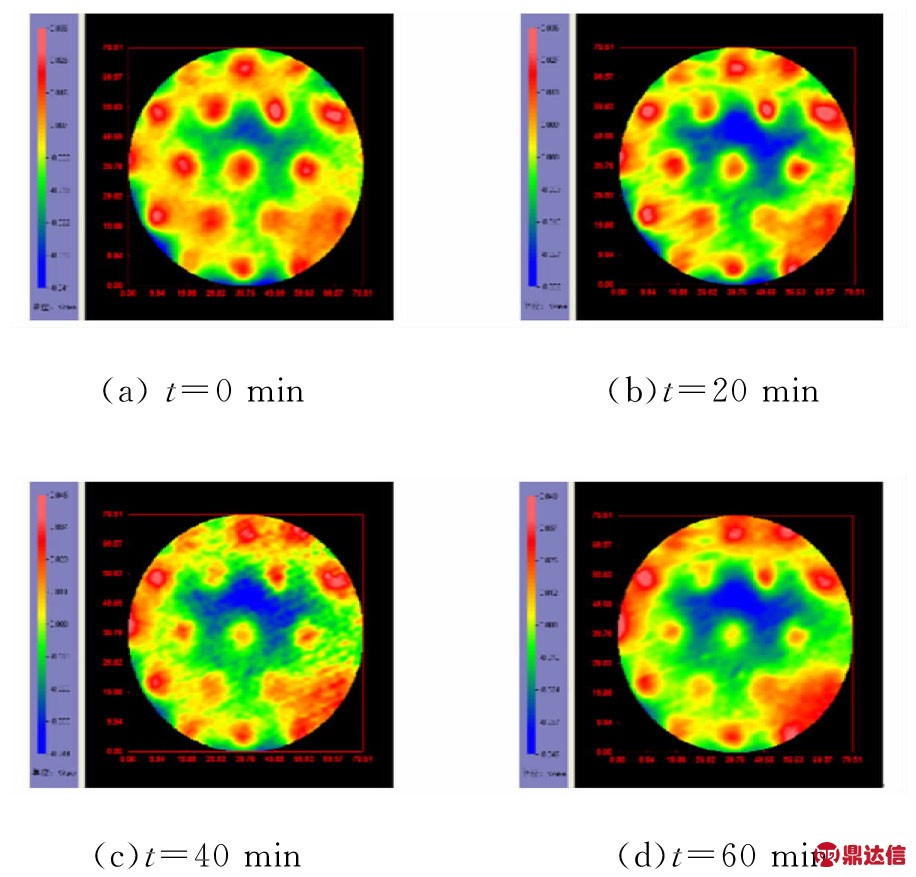
图2 变形镜的初始面形及静置不同时间后的面形
Fig.2 Static stability of deformable mirror
表1 变形镜初始面形和静置不同时间后的面形
Tab.1 Surfaces of deformable mirror after several period of time (nm)
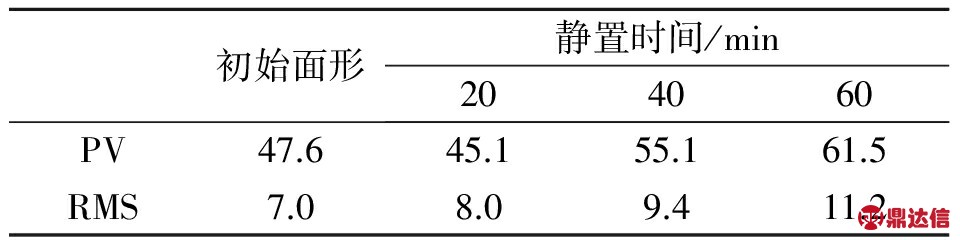
从表1可以看出,静置过程中变形镜的面形发生了微小的变化,随着静置时间的增大PV和RMS都有不断增大的趋势,但在60 min内,面形基本维持在PV<60 nm,RMS<30 nm的范围内,由此表明所选择的径厚比能够满足全息记录对变形镜稳定性的要求。
3.2 镜面响应函数的确定及校正电压的求解
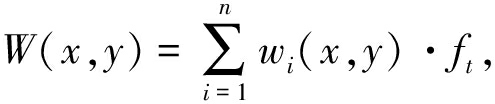
在一定的弹性范围内,镜面变形量W(x,y)与促动器作用力的大小满足线性关系,即:
(1)
式中:fi为第i个促动器施加的作用力(则指施加电压);wi(x,y)为单位作用力下(对于压电陶瓷促动器,则指施加单位电压)第i个促动器所引起的镜面形变,即该促动器的响应函数;n为促动器数量。
促动器影响函数可以通过直接测量法由实验确定[7-8]。实验中,采用Hi-Marc-150激光干涉仪(λ=632.8 nm)测量各个促动器施加单位电压前后的镜面面形,面形用泽尼克多项式拟合,两组泽尼克多项式系数之差即为该促动器的影响函数。
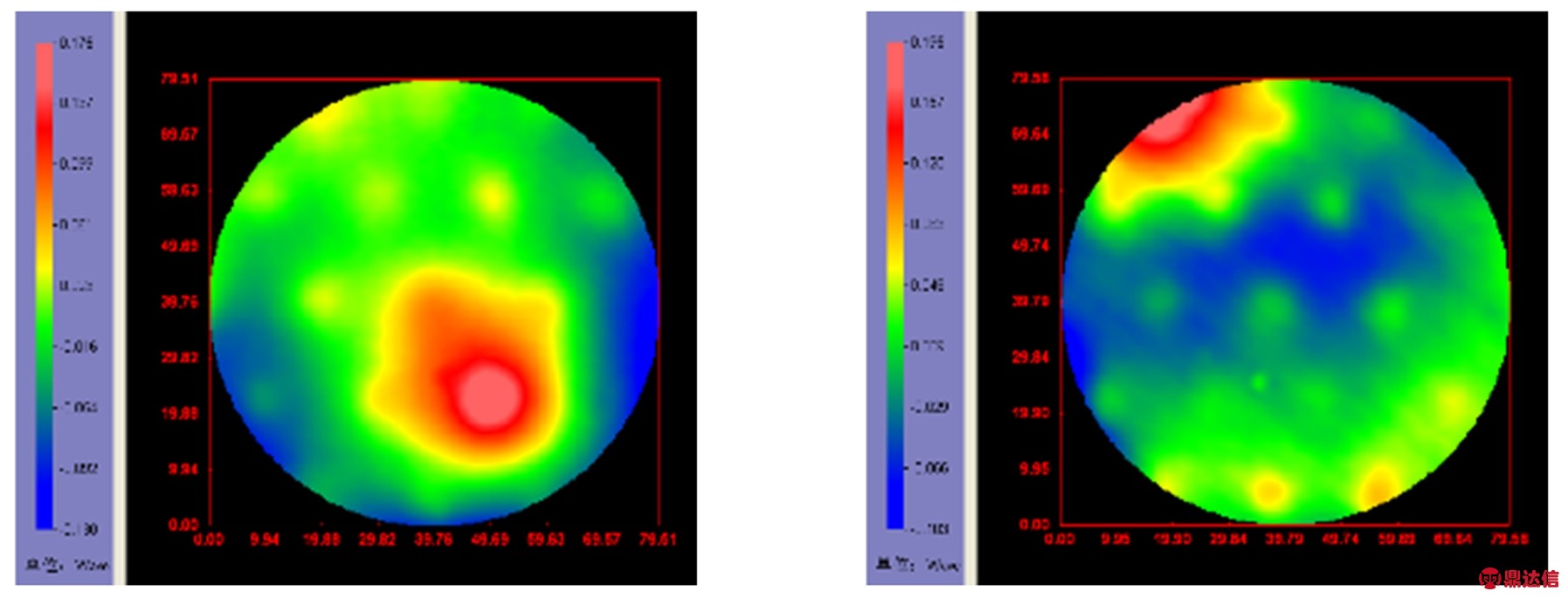
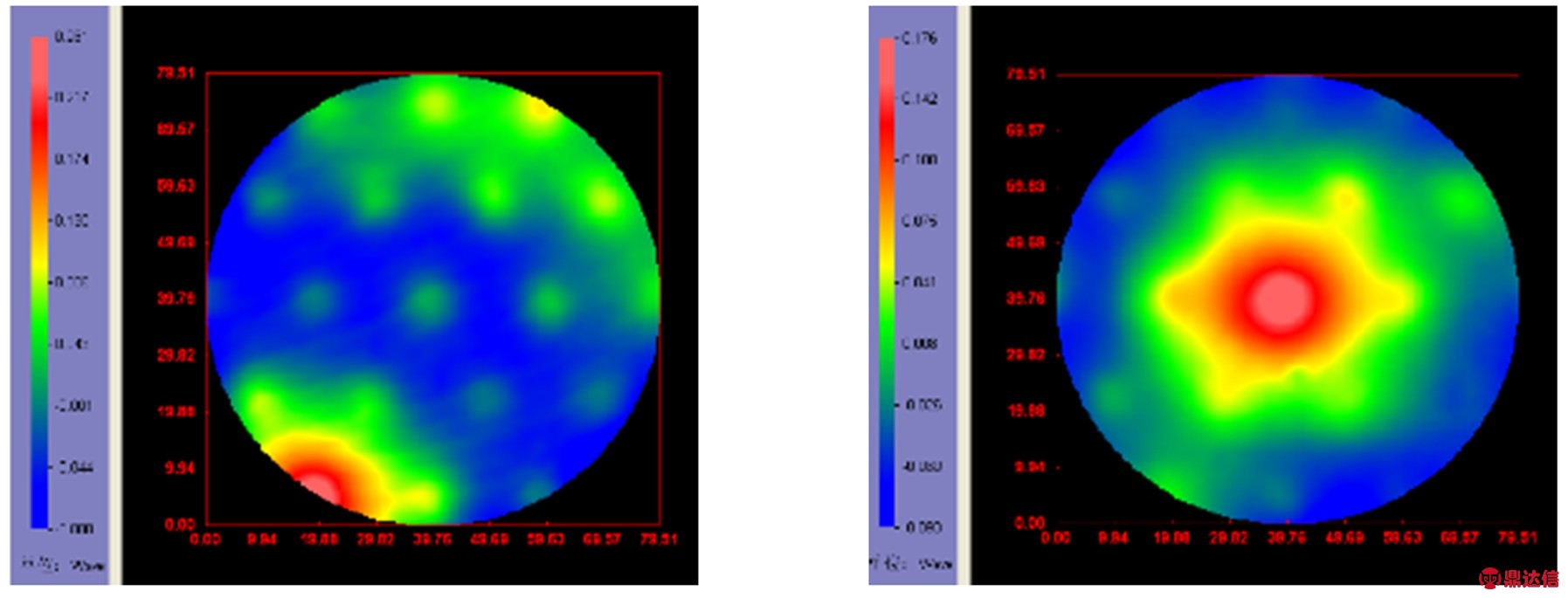
图3 某4个促动器的影响函数
Fig.3 Response functions of certain 4 actuators
图3为当镜面初始面形的PV<60 nm,RMS<30 nm时,其中4个促动器在单独施加1 V电压时的影响函数。显然,这4个促动器的作用范围和幅度均不相同。由于促动器数量较少,对变形镜边缘的控制能力较弱,这里考察了变形镜80%口径的波面。分析施加单位电压前后的波面,得到相应的Zernike多项式系数![]() 其中j=1~37,为Zernike多项式的项数),各个促动器的影响函数为
其中j=1~37,为Zernike多项式的项数),各个促动器的影响函数为![]() 由此构建变形镜的刚度矩阵Ci,j,即:
由此构建变形镜的刚度矩阵Ci,j,即:
Ci,j=(w1,w2,…,wi).
(2)
由式(1)可知,如要校正或补偿一个面形为W的波面,施加电压f,产生-W的面形即可,即:
-W=C·f.
(3)
采用最小二乘法求解,可得:
f=-(CTC)-1CTW.
(4)
不过最小二乘法求解有时会得到很大的施加电压,以至超出变形镜能够承受的范围。因此这里采用阻尼最小二乘法,即:
f=-(CTC+γ·I)-1CTW,
(5)
其中:γ是阻尼因子(>0),I是单位矩阵。选取适当的阻尼因子,对较大的解进行衰减,使求得的校正电压在变形镜能够承受的有效范围内。γ的选择范围为0.01~1,γ越大,对解的衰减越大。
3.3 变形镜面形的优化控制方法及波面拟合能力
变形镜对给定波面的拟合能力代表了它对波面的空间校正或补偿能力,这种能力通过残余波面的PV和RMS值进行表征。残余波面ΔW(x,y)是变形镜的目标面形W(x,y)与镜面的最终面形W0(x,y)之差,即:
ΔW(x,y)=W(x,y)-W0(x,y).
(6)
PV和RMS值越小,说明变形镜对波面的拟合能力越高。通常认为,若残余波面PV接近或小于原始波前的10%,变形镜具有理想的波面拟合能力。
实际拟合是一个逐渐逼近目标波面的优化过程,一次校正或补偿往往不能得到理想的效果,因此,本文采用整体优化结合局部优化的波面拟合方法[9-10]。首先,对变形镜面形进行整体优化:
ΔWn=W-Wn,
(7)
其中:Wn为经过n次校正后变形镜的面形,ΔWn为需要校正的面形与经过n次校正后的面形之差。则在施加第一次电压f0的基础上需要的控制电压为:
Δfn=-γ(CTC)-1CTΔWn.
(8)
促动器的控制电压为:
(9)
其中:N为校正电压的施加次数。当W-Wn-1<W-Wn时,整体优化转为局部优化,即对与局部优化后变形镜的面形wm最大值与最小值对应位置的促动电压进行优化。m次局部优化后的面形残差为:
Δwm=W-wm,
(10)
其中wm为经过m次局部优化后变形镜的面形。在已加电压的基础上需要施加的局部优化控制电压为:
Δfm=-γ(CTC)-1CTΔwm.
(11)
促动器上总的控制电压为:
(12)
当W-wm-1<W-wm时,局部优化中止。
图4(a)~4(b)分别为目标波面设为离焦、像散、彗差和球差(面形PV分别为0.6,0.6,0.4和0.225 μm)时,所研制的小形变变形镜的波面拟合及控制电压优化前后波面的残差情况。表2给出了优化前后波面残差的具体数据。
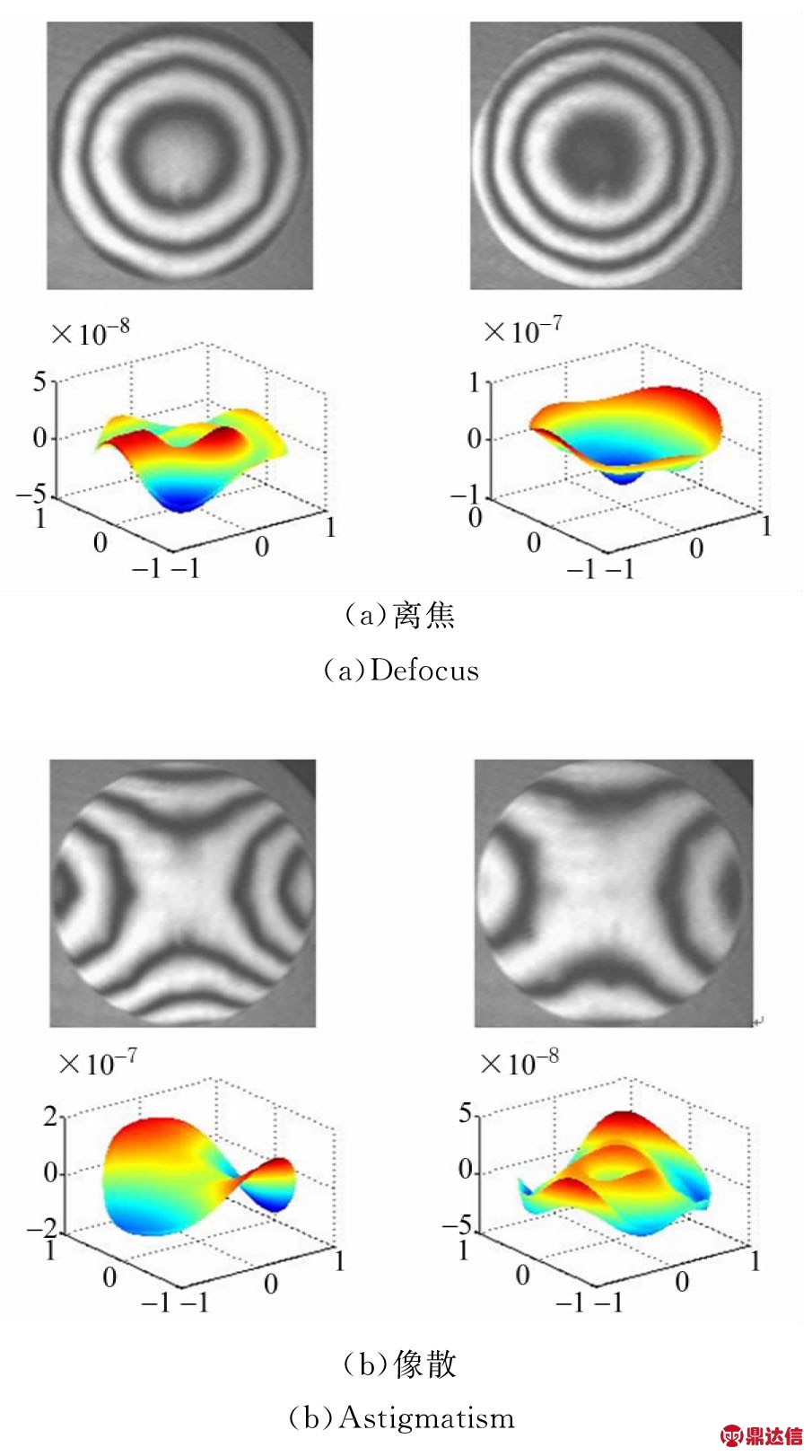
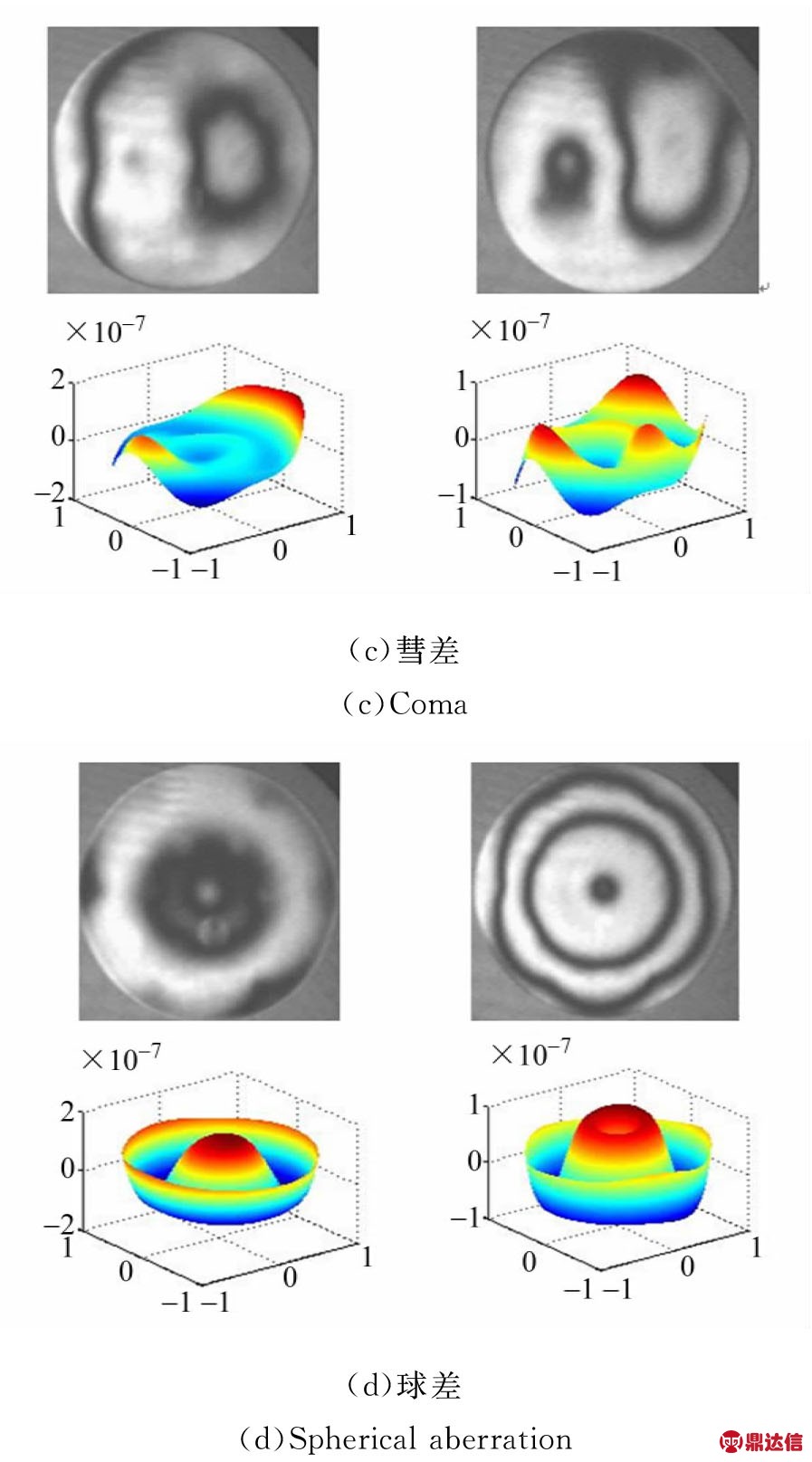
图4 小形变变形镜施加电压优化前(左)后(右)的像差及目标波面的残差
Fig.4 Aberrations generated by deformable mirror and corresponding residual aberration maps before(left) and after (right) optimization of control voltages
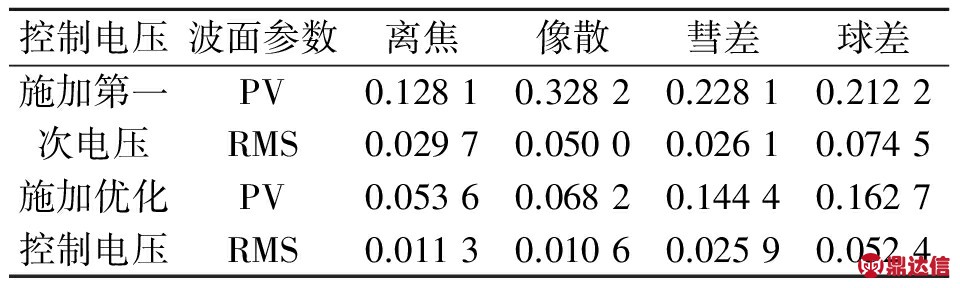
表2 小形变变形镜面形控制电压优化前后的波面残差
Tab.2 PV and RMS data of residual aberrations generated by deformable mirror before and after optimization of control voltages (μm)
4 低像差全息光栅的制作
用所研制的小形变变形镜构建主动式全息记录光学系统,如图5所示,选用具有较大像差的基板开展光栅像差补偿实验。用干涉仪测量得到光栅基板的面形约为0.93λ(图6(a)),对此波面进行数据分析,得到变形镜的面形控制数据,获得用于补偿基板像差的变形镜的面形约为0.64λ(图6(b)),所制作的全息光栅的衍射波像差约为0.14λ(图6(c)),波像差得到了有效改进。由于变形镜控制精度和记录光路中系统误差等的影响,补偿后的光栅波像差中仍存在少量的残差。
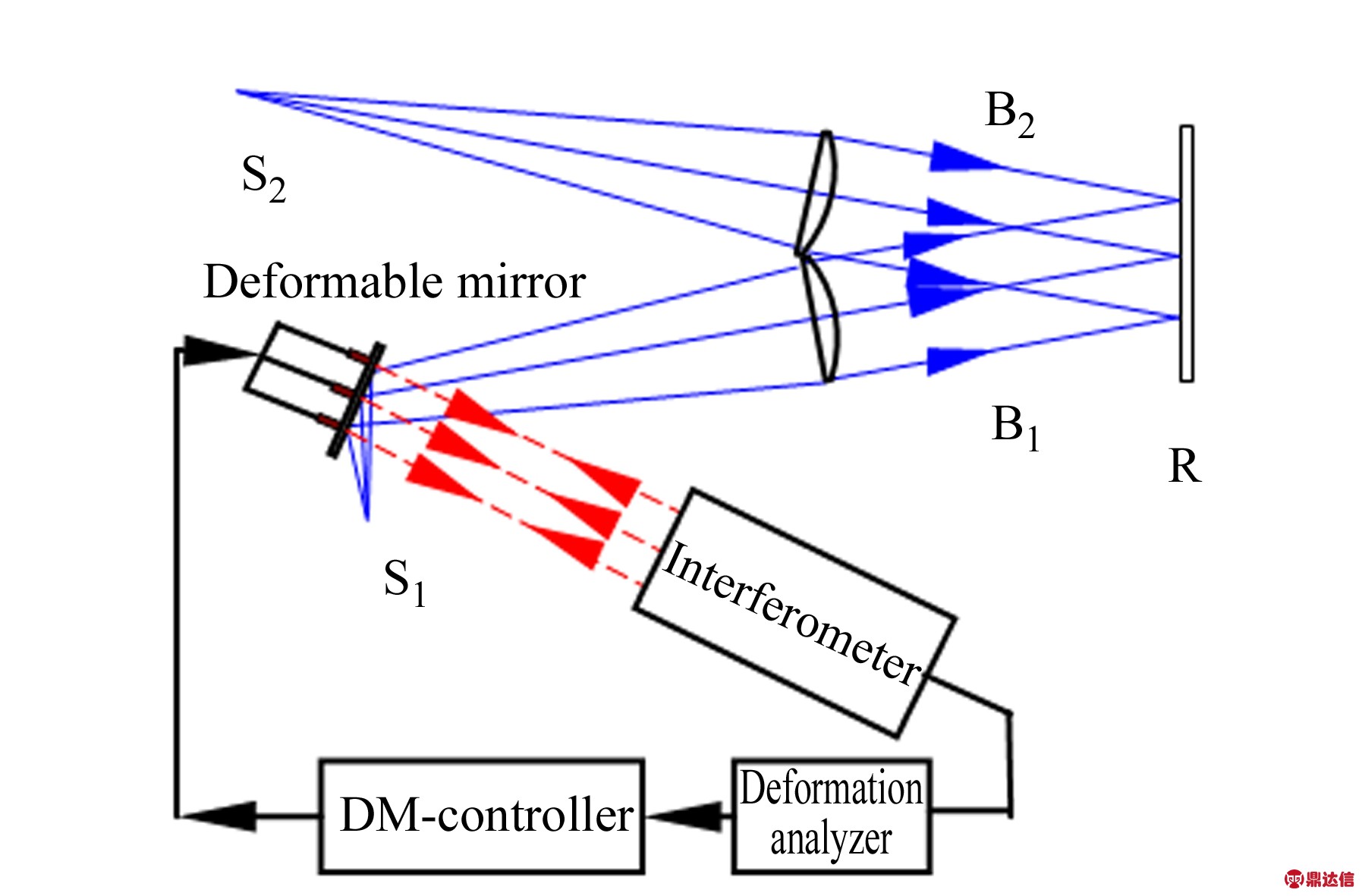
图5 主动式全息记录光学系统
Fig.5 Active holographic recording optical system
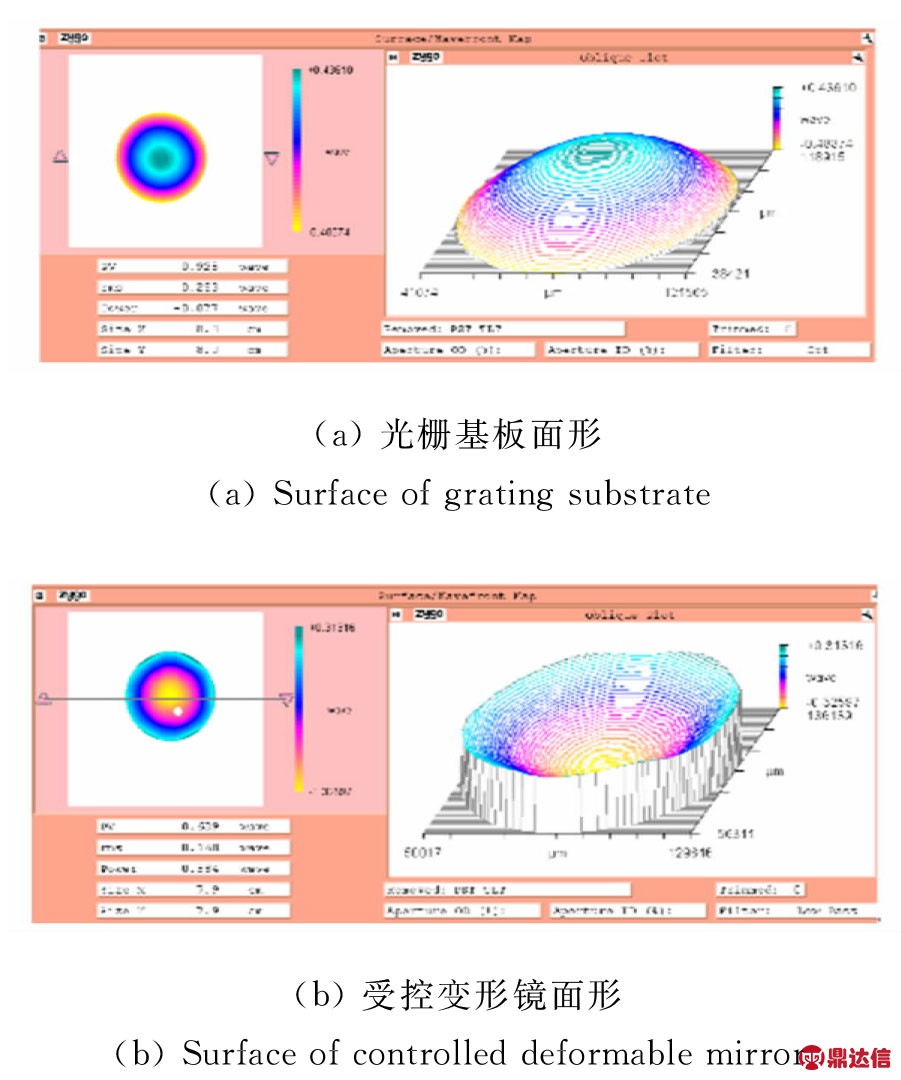
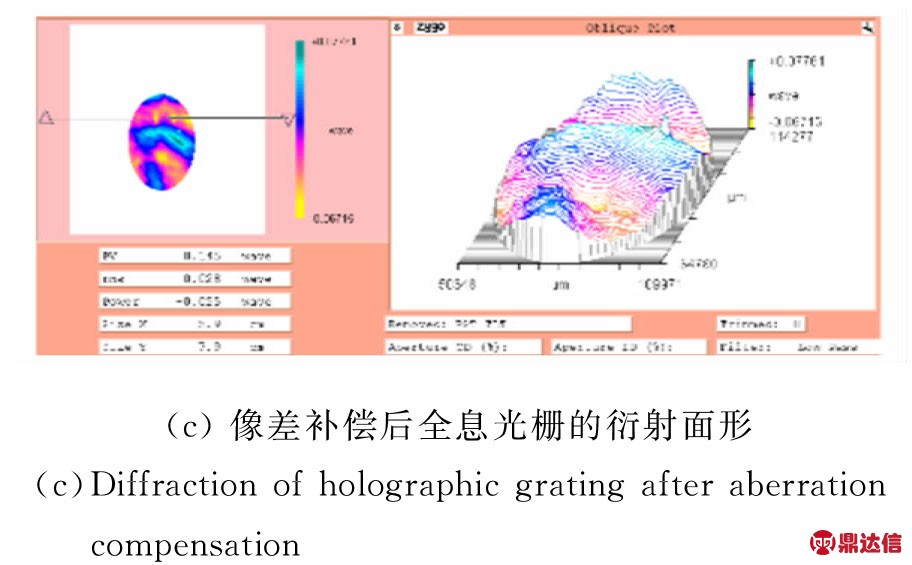
图6 较大像差基板上的全息光栅像差补偿实验结果
Fig.6 Results of holographic aberration compensation experiment on grating substrate with larger aberration
5 结 论
本文根据大口径PCG低像差的要求,针对光栅基板加工残存较大像差的实际情况,设计并制作了一种小形变变形镜,并提出了面形优化控制方案。通过实验验证了变形镜的面形控制能力,并用它构建了主动式全息光学记录系统,开展了低像差全息光栅的制作。在基底像差约为0.93λ时,制作的全息光栅的衍射波像差约为0.14λ,由此证明了小形变变形镜在光栅基底像差补偿上的有效性。


