
摘要:设计了一种高精度位移传感器——衍射光栅干涉仪系统。该系统利用半导体激光器作为光源,衍射光栅作为长度标准,其光学原理可以利用多普勒效应来阐述。给出当光栅存在沿X向、Y向上的位移偏差和绕X轴、Y轴和Z轴的转动误差时,引起干涉条纹质量变化和测量误差的定量关系,为测量系统在实际应用中进行误差修正提供依据。经分析可知,光栅沿X轴(光栅运动方向)、Y轴(光栅刻线方向)和Z轴的偏移几乎不会导致条纹信号变化;当光栅沿着X轴旋转时,条纹方向和间隔均发生了变化;当绕Z轴旋转时,条纹间隔没有变化但是方向发生了变化;当沿X轴和Y轴旋转后,条纹位置分别向右和向下移动。光栅沿Z轴移动误差小于0.05mm,绕X轴和Z轴旋转误差小于0.002rad,绕Y轴旋转误差小于0.005rad时,满足测量范围为1000mm时,精度为±3μm测量的要求。
关键词:位移测量;衍射光栅;干涉仪;干涉条纹
1 引言
由于高精密制造技术的飞速发展,微小器件的尺寸不断被突破,达到微米级甚至是纳米级。因此,精密定位测量技术也必须不断提升。目前工业上大量应用的有He-Ne激光干涉仪高精度位移测量系统,但是其价格昂贵、操作复杂,同时其测量精度受环境影响非常大[1]。在车间条件下,基于光栅干涉测量系统有一些特别的优点,因此国际上有一些生产和研究衍射光栅干涉测量系统的厂家和研究机构,其成果也层出不穷,如美国的NanoWave公司和MicroE公司、德国的海德汉公司、日本的索尼公司等都有了自己成熟的产品[2-8],日本的 R.Sawada[9]和波兰的M.Dobosz等[10]也提出了自己的衍射光栅干涉系统,台湾大学范光照教授也对此系统做了深入的研究[11]。
目前国内对该技术的研究仍处在起步阶段[12,13],工厂和车间仍是靠购买国外的测量系统来满足需求,价格昂贵,维修周期长;或者仅对系统后期处理电路进行研究[14,15]。针对这种情况,提出一种基于激光二极管的高精度光栅干涉仪系统。该系统利用激光二极管作为光源,降低了成本同时提高了使用寿命,利用光栅栅距而不是光波波长作为测量基准,减少环境对测量结果的影响。并分析了光栅干涉仪的主要问题即测量精度对光栅运动误差的敏感度,为深入研究该课题进而应用于实际生产中具有深远的意义。
2 测量原理
光栅干涉仪的原理简图如图1所示,半导体激光器(LS)射出的激光光束在光栅表面产生衍射,最后R1的+1级和R2的-1级发生干涉,由硅光电池作为光电探测器PD1-PD4检测信号。R1和R2经过的光路如下:R1:PBS1-Q1-PBS2-Q2-C-LG-L-C-Q2-PBS2-Q4-NPBS-偏振光检测;R2:PBS1-Q1-PBS2-Q3-M-L-G-M-Q3-PBS2-Q4-NPBS-偏振光检测。
其中偏振分光镜PBS1和1/4波片Q1组成起偏隔离器,防止零级衍射光回射激光器,影响激光器的输出稳定性。C为补偿R1和R2光程差所设置。
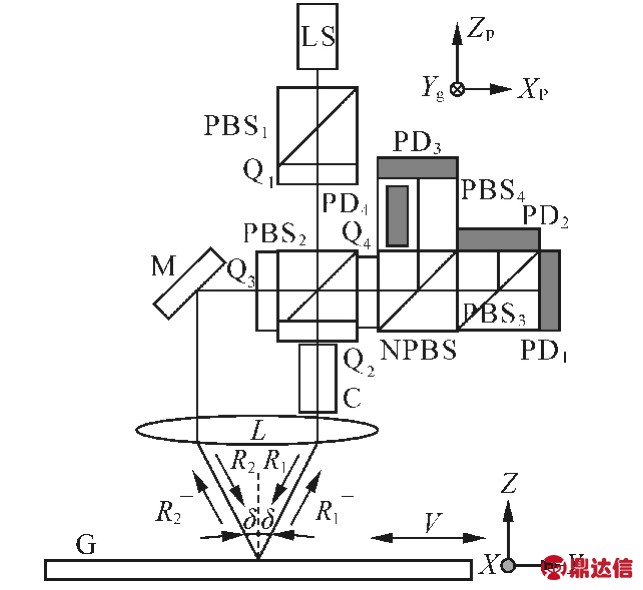
图1 光栅干涉仪原理图
G.光栅 M.反射镜 C.补偿片 PBS1.偏振分光镜1 PBS2.偏振分光镜2 PBS3.偏振分光镜3 PBS4.偏振分光镜4 Q1-Q4.1/4 波片1-4 NPBS.非偏振分光镜
可以通过琼斯矢量方法来分析上述测量系统的光路。半导体激光器LS出射的光是光矢量沿X轴的线偏振光,矩阵表示为
偏振分光棱镜PBS的琼斯矩阵为
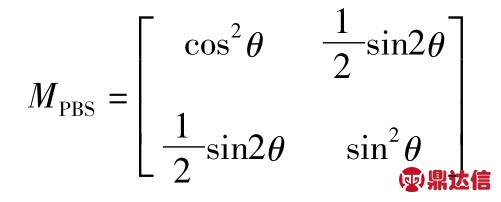
将一束光按偏振态分为两束,穿过分光面的为P 光(θ=0°),被分光面反射的为 S 光(θ=90°),则PBS1-3的传递矩阵可以表示为
PBS4透振方向与X轴摆放成45°,其琼斯矩阵为
1/4波片Q1、Q2、Q3和Q4的快轴与X轴摆放成45°,其琼斯矩阵为
设光栅对θ角度入射的P光和S光的衍射率分别为kP(θ)和kS(θ),则光栅的传递矩阵可表示为
反射镜M的琼斯矩阵为
式中,rp和rs分别表示P光和S光的振幅反射系数。
由上述公式可得,R1和R2两光路在经过Q4后,得到的偏振光琼斯矩阵分别为
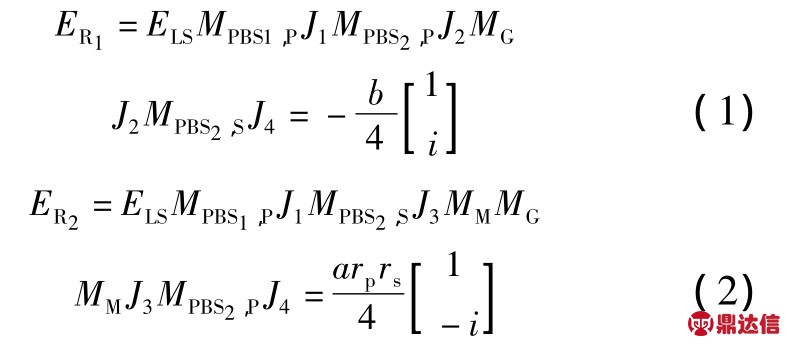
式中,kP(θ)+kS(θ)=a,-kP(θ)+kS(θ)=b。
从式(1)和式(2)可以看出,从Q4射出的ER1和ER2分别为左旋和右旋偏振光,叠加后不会产生干涉条纹,而在NPBS-PBS3-PBS4的作用下后,会产生不同相位的干涉条纹信号。由于光栅多普勒频移的存在,则四路出射信号的电场为
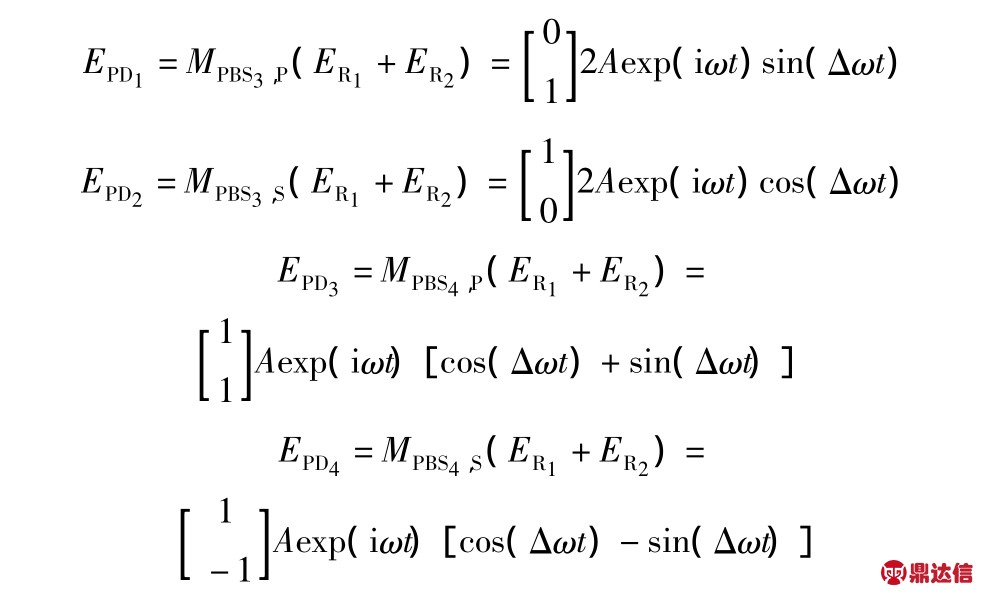
光电探测器上接收到的光强(即能量),可视为电场向量的范数平方,则四个光电探测器上的光强为
由以上推导可知,四个光电探测器上的光强呈正弦变化,且相位相差90°。通过过零触发获得相位相差90°的方波信号,进而通过四细分辨向计数可以获得分辨率为1/4信号周期的位移测量结果,并获知方向,通过细分可提高测量分辨率。系统处理流程图如图2所示。
图2 衍射光栅测量系统流程图
3 光栅运动导轨误差的影响
理论上,光栅干涉仪系统中的各光学元件摆放于其理想位置,光栅运动导轨无误差,波长为λ的平行光束入射到光栅常数为d的反射式衍射光栅上,当光栅移动时,±1级衍射光平行出射并完全重合于一点,产生干涉从而获得准确的位移信号。实际中,各个光学元件均有六个自由度,光栅运动导轨存在直线度误差,可能导致±1级光线偏离理想位置(存在夹角或者平移),影响干涉条纹质量,造成测量误差。根据激光的传播特性[16],当±1级衍射光线之间的夹角为2φ时,产生的附加干涉条纹的条纹常数为
针对本设计方案,建立如图3所示的光栅坐标系统。理论分析光栅沿Z轴的偏移和X、Y、Z轴的转动对干涉条纹质量的影响。光栅沿X轴(光栅运动方向)和Y轴(光栅刻线方向)移动几乎不会导致信号变化。
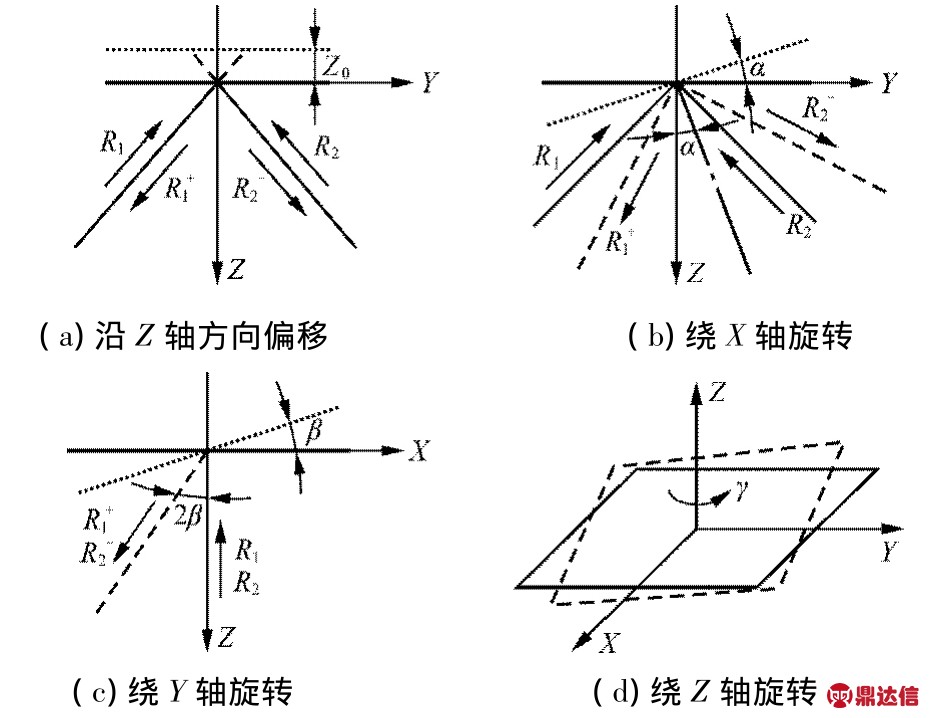
图3 光栅运动误差
3.1 光栅沿Z轴的偏移(远离)对干涉条纹质量的影响
如图3a所示,当光栅沿着Z轴方向偏移Z0时,由于该系统采用了单倍望远镜结构,当入射角度不变时,衍射光回射方向也不会改变。如果不考虑球面棱镜的球差问题,光栅沿Z轴的偏移对测量结果没有影响。
3.2 光栅沿X轴旋转(俯仰)对干涉条纹质量的影响
如图3b所示,当光栅绕X轴旋转α角时,因为光束R1入射角和衍射光束R1+的衍射角度关系满足光栅方程[17],其中入射角度 θi=δ+α,衍射级数m=+1,则 R1+出射角度为 θq1=arcsin[(λ/d)-sin(δ+α)],同理R2-的出射角度为θq2=-arcsin[(λ/d)-sin(δ+α)]。
光栅的俯仰误差破坏了单倍望远镜系统结构,使得最后光电检测器检测到的两束衍射光之间存在夹角Δφ,Δφ=2α,根据式(7)可以得到,干涉条纹常数变化量和衍射光线夹角之间的关系为
Δρ为干涉条纹常数变化量。例如,当 α=0.1arcmin,入射波长 λ=635nm,条纹常数 ρ=2mm时,代入式(8)可得系统条纹常数的变化为36%。可以看出此系统精度对光栅的俯仰角度非常敏感,所以在选择光栅导轨时,重点提高导轨的此项精度。
3.3 光栅沿绕Y轴旋转对干涉条纹质量的影响
如图3c所示,当光栅绕Y轴旋转β角时,尽管入射光束R1和R2和衍射光束R1+和R2-之间存在夹角2β,但在衍射光束R1+和R2-经过一系列光学元件后,仍然在光电检测器上完全重叠,只是沿着X轴同一方向偏移Δx=f'tan(2β),f'为球面棱镜L的焦距。只要Δx<D/2就不会影响信号质量,其中D为光电检测器件的直径。
3.4 光栅沿绕Z轴旋转(偏摆)对干涉条纹质量的影响
图3d显示当光栅绕Z轴旋转γ角时,两束衍射光平行出射,但是会在光电检测器上产生沿Xg轴和Zg轴方向的偏斜量。实际中,两干涉光束的光点在光电检测器处需要有一定的重叠性才可得到足够清晰的干涉条纹及信号,重叠不佳时的干涉信号的对比度将下降,通常要保证两干涉光束的光点距离小于1/2光点直径。当光栅绕Z轴旋转γ角时,两光束偏转距离为s=2f'tanγ。同时干涉条纹绕Z轴旋转γ角。
4 误差及干涉条纹仿真分析
假设光栅沿着X轴旋转α角时,使得光栅和导轨移动方向存在夹角α,则实际运动位移x和测量位移x1之间的关系为x=x1cosα,测量误差为Δx=x-x1=x1cosα -x1≈ -x1α2。
当光栅绕Z轴旋转γ角时,使得光栅刻线方向(测量方向)和导轨移动方向存在夹角γ,则实际运动位移x和测量位移x2之间的关系为x=x2/cosγ,测量误差为 Δx=x-x2=x2/cosγ -x2≈x2γ2。
由于光栅沿着X轴和Z轴旋转时,均导致干涉条纹方向发生变化,会导致很大的细分误差。光栅沿Y轴的旋转和沿Z轴方向偏移对测量结果影响很小,可以忽略。
结合分析结果,通过软件来仿真光电检测器接收的干涉条纹信号。设定波长λ=635nm,光栅常数d=0.001mm。干涉图像仿真结果如图4a-e所示。图4a是光栅在理想状态下的干涉条纹图样;光栅沿Z轴移动0.05mm后的干涉条纹图样如图4b所示;当光栅绕X轴旋转0.002rad时产生的干涉条纹图样如图4c所示;绕Y轴旋转0.005rad时产生的干涉条纹图样如图4d所示;绕Z轴旋转0.002rad时产生的干涉条纹图样如图4e所示。
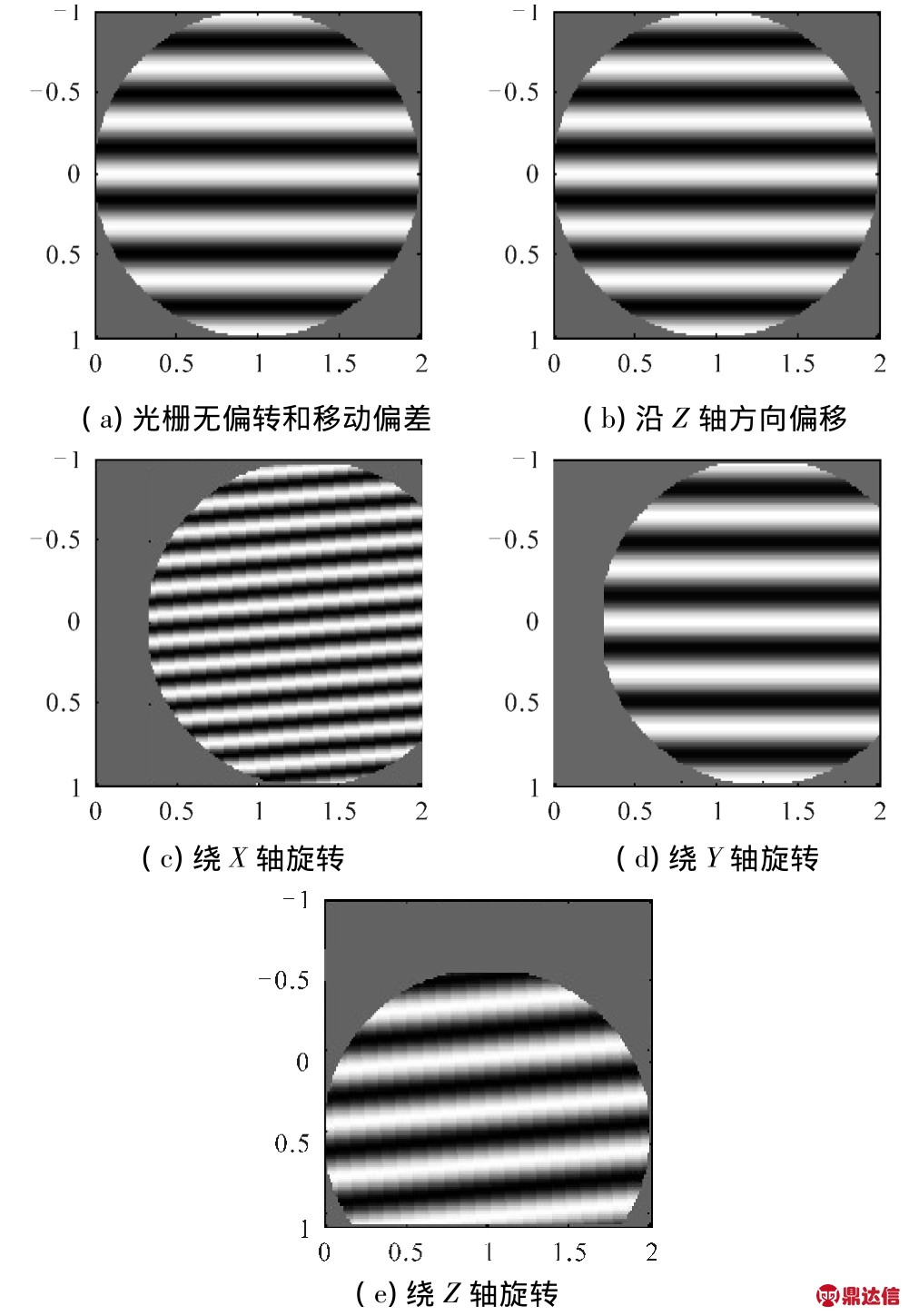
图4 光栅运动误差对衍射光束干涉条纹质量影响的仿真图
由图4可看出,当光栅沿Z轴移动时,衍射条纹的方向和间隔都没有发生变化;但是当沿着X轴旋转时,条纹方向和间隔均发生了变化;当绕Z轴旋转时,条纹间隔没有变化但是方向发生了变化;当沿X轴和Y轴旋转后,条纹位置分别向右和向下移动。如果变化值小于仿真所假定的值,可以满足测量的要求,即测量范围为1000mm时,精度为 ±3μm。
5 结语
本文详细介绍了一种衍射式光栅干涉仪的原理和结构,采用单倍望远镜结构作为基础,提高了系统光学元件的抗偏摆能力。未加细分电路之前,系统分辨率为0.25μm。理论分析了衍射光栅的六个自由度运动对两束衍射光线干涉效果的影响,为设定光栅导轨的公差范围提供定量和定性依据。最后根据两束衍射光线的位置和夹角,利用计算机对干涉条纹进行了仿真,为影响干涉条纹质量的主要因素提供了更直观的分析。


