
摘要:为克服现有光纤光栅位移传感器设计中存在的传力介质弹性系数易改变、滑块易产生偏移等对测量精度的不利影响,提出了一种滑动式位移传感器。楔形滑块的滑动面和限制面的采样互相垂直、等强度梁的变截面和一体化、滑动面圆弧化等特殊设计,使传感器具有抗滑动干扰性、梁挠位移测量的高灵敏性、长期往复测量的耐磨性等优点。阐述了传感器测量原理,加工制造了传感器原型,并开展了全面的性能测试。测试结果和误差分析表明:传感器在0~100 mm 的量程中,灵敏度为20.11 pm/mm,精度达到0.099 5% F.S,具备良好的微位移测量能力;重复性误差和迟滞误差分别仅为0.705%和0.403%,且抗蠕变性能良好,可满足机械装备、土木工程等重大设施的结构健康监测对位移、变形测量的精度和长期稳定性要求。
关 键 词:光纤传感器;光纤Bragg光栅(FBG);位移传感器;悬臂梁;等强度梁
1 引 言
位移是结构健康监测(Structural Health Monitoring, SHM)领域最为重要和基础的物理量之一,因此,位移传感器在机械装备、土木工程等重大结构的变形、开裂、滑动监测中起着重要的作用。近年来,光纤传感技术蓬勃发展,其中光纤布拉格光栅(Fiber Bragg Grating, FBG)元件除了具备无电检测、抗电磁干扰、体积微小等优点外,因可采用波长编码检测还具有波长值不受光源功率波动影响,单根光纤可串接多个不同波长的光栅等优势[1-2]。目前,基于FBG原理的先进传感与检测技术得到了广泛应用[3-6],其中,FBG位移传感技术一直是学者们的研究热点,有关其传感方法、设计制造封装、信息处理等方面的研究报道大量涌现。
FBG的光谱漂移对轴向应变和温度敏感,然而受光纤材料物理性能的限制,FBG在直接的轴向应变作用下能够产生的拉伸位移非常有限。根据FBG的光谱漂移情况来实现位移的检测,就需要设计与FBG匹配的弹性转换体,例如可将弹簧直接与裸光纤光栅串接[7-8],用弹簧拉伸后的伸长量表征被测物体的位移。悬臂梁作为经典的弹性元件,常用于设计光纤光栅位移传感器,将FBG粘贴在悬臂梁的表面,梁自由端的弯曲挠度用于反映被测对象的位移,FBG感知梁弯曲时的表面应变,通过检测FBG的光谱漂移信息来表征被测位移[9-14];还有一种方法是将另外一种弹性元件和悬臂梁串接,如将弹簧[15-17]、液压伸缩缸[18]与梁的自由端连接,利用它们的弹性形变和梁挠度的叠加实现更大位移的检测。但是将弹簧、液压缸等弹性体与裸光栅或者布置有光栅的悬臂梁串接时,外界位移是通过弹簧等弹性体的张力传递到光栅或者悬臂梁上的。在长期服役时,尤其是位移频繁变化的工况下,弹簧等弹性体的弹性系数易发生变化,从而导致相同位移时作用到光栅或悬臂梁上的张力改变,测量不准确。而将楔形滑块与悬臂梁结合设计位移传感时[19-20],滑块的斜面与梁自由端接触,被测位移带动滑块移动时,斜面逐渐引起梁的弯曲,外界位移可完全转化为梁的挠度,从而避免了将弹簧等弹性体作为传力介质时易发生的弹性性能改变之不足。此外,还有基于杠杆原理的高灵敏型位移检测[21]、布置有光栅的环形弹性体与弹簧串接[22],布置有光栅的弓形弹性体[23]、以及将齿轮与悬臂梁结合实现大位移测量[24]等位移传感器设计方法。
在裸光纤光栅或者粘贴在悬臂梁表面光纤光栅的光谱信息检测中,其中心波长值可直接用来反应被测位移[15-24],不过需要外加温度补偿光栅;另外一种是将同一光栅布置在梁应变分布的不同区域,根据光栅在非均匀应变作用下产生的反射谱带宽的变化来反应被测位移[9-14]。该方法可以避免波长检测时应变与温度间存在的交叉敏感问题,但由于带宽的监视往往需要专业的光谱仪,光谱仪在扫描频率、成本等方面的优势不及波长解调器,因此它不利于工程实际中的长期实时监测。
本文在现有研究的基础上,采用楔形滑块与等强度型悬臂梁相结合的传感原理,对楔形滑块的滑动方式、悬臂梁与滑块接触的自由端面等进行了设计,避免了滑块水平滑动时易产生的竖向移动对梁挠度的负面影响,减小了梁与滑块之间的滑动接触摩擦;采用变厚度的等强度梁结构设计,有利于将梁的挠度转化为布置光栅处的梁弯曲,可提高测量灵敏度。最后,加工制造了传感器原型并开展了全面的性能测试,结果表明该位移传感器具有良好的测量能力和广阔的应用前景。
2 传感器结构与测量原理
2.1 传感器的结构设计
滑动式FBG位移传感器的整体结构如图1所示,其主要部件包括基座、楔形滑块、悬臂梁、拉杆、弹簧、套筒和固定螺帽等。FBG1在剥离光栅区域的光纤涂敷层后,使用美国EPO-TEK公司生产的353ND光学胶黏剂将FBG1全部封装粘贴在悬臂梁等强度部分的下表面。梁自由端与楔形滑块的表面接触,楔形滑块底部安装在基座的滑槽中,可左右自由移动。外部套有弹簧的拉杆一端与滑块通过螺纹固定,另一端依次穿过基座、套筒后伸出,并与固定螺帽旋紧,其作用是将外界位移传递到楔形滑块上。弹簧一端抵住滑块,另一部分藏于套筒内,使拉杆具有良好的往复运动能力,但并不作为位移的传递介质。固定螺帽上设计有紧定螺钉孔,以便于拉杆与被测物体的连接和固定。
楔形滑块左端高度大于右端高度,基座的最左端为位移的零值点,此时悬臂梁自由端刚好与滑块表面接触。随着外界位移的作用,滑块右移,迫使梁弯曲,FBG1感知梁表面的弯曲应变,波长发生漂移。采用波长检测的信息处理方式,由于FBG的波长同时对轴向应变和温度敏感,需要对FBG1实施温度补偿。通过长期的FBG传感器研发可知,胶黏剂粘贴封装于基体上的FBG,由于不可避免地存在敷设工艺差异(如胶层厚度、长度等),不同FBG之间的温度灵敏度存在无规律的差异;而且随着时间的长期推移,胶黏剂老化后这种差异变得更无确定性,但对于不使用胶黏剂封装的、自由状态的裸FBG,其温度灵敏度一直十分稳定。因此,在本设计中,FBG2的栅区处于自由粘贴状态,栅区两侧的光纤部分使用353ND胶黏剂固定在传感器基座内的平台表面上,为FBG1提供温度补偿。只有FBG1为胶黏剂封装,以降低整个传感器的温度不确定性。

图1 传感器整体结构设计示意图
Fig.1 Overall structure of FBG displacement sensor
楔形滑块的结构如图2所示,与悬臂梁滑动接触的倾斜面的较低端的高度为H1,高端的高度为H2,斜面表面采用磨床加工,保证直线度和光滑度;斜面侧边的矩形凸起部分为限制面,放入基座滑槽内,保证滑块不会沿着斜面高度方向移动,以克服现有设计中滑块沿滑槽移动时易产生的竖向移动,补偿正常的梁变形测量之不足。
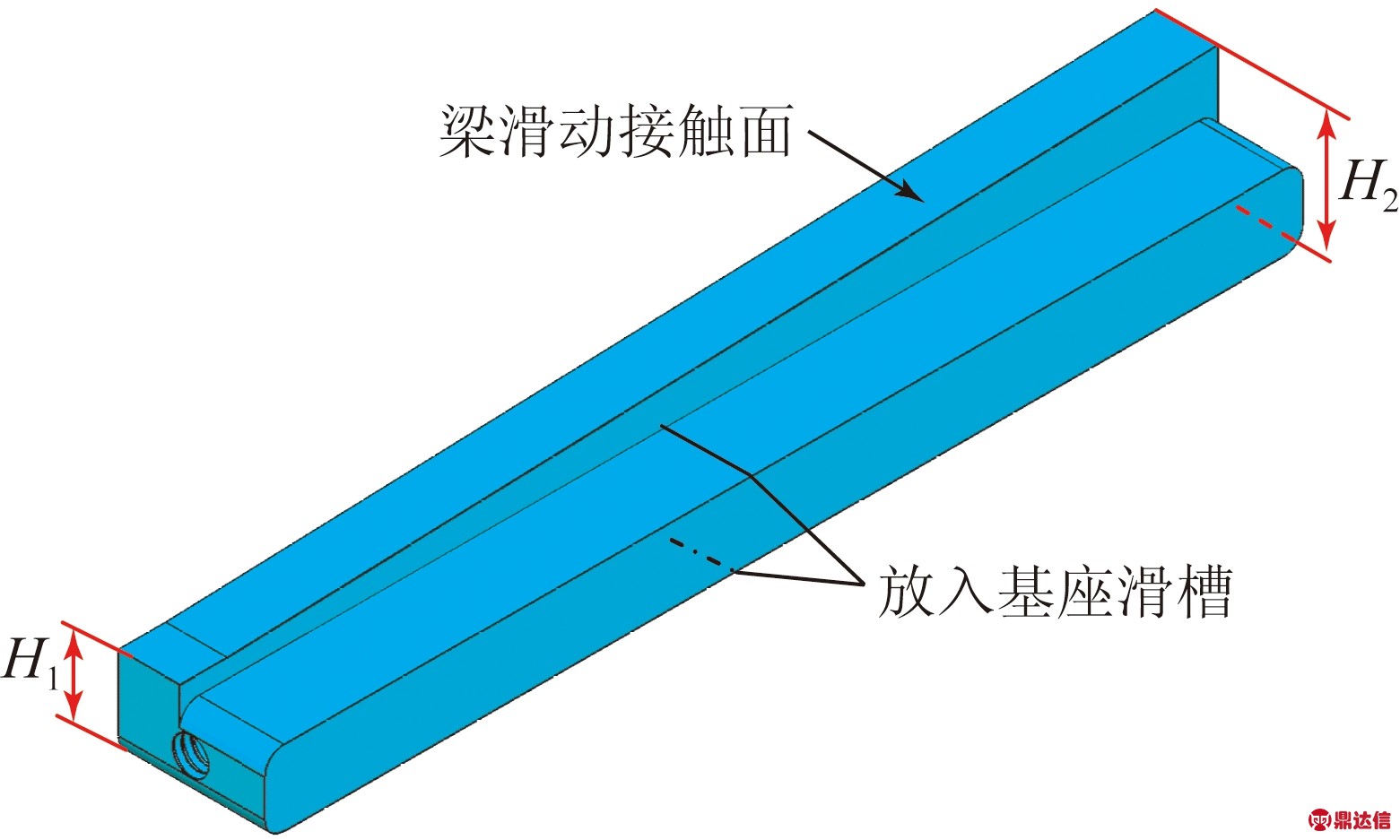
图2 楔形滑块的设计示意图
Fig.2 Structure design of cuneiform slide block
悬臂梁的结构如图3所示,梁整体结构呈“L”型,与滑块斜面接触的弯折部分端部设计为圆弧面,加工时采用精铣以保证光滑度,与磨床加工的滑块斜面配合实现精准、平滑的挠位移传递。悬臂梁固定端采用的是等强度结构设计,自由端采用的是等截面结构设计,且二者的厚度不同,粘贴FBG1处的等强度部分厚度为h1,小于等截面部分的厚度为h2。该设计的优点在于:可以将梁在挠位移作用下产生的弯曲变形集中到布置有光栅的等强度梁部分,从而使FBG获得更高的应变测量灵敏度。图4给出了h1=1 mm,h2=2 mm时,梁顶端承受0.8 mm 的挠位移的情况下,梁表面的应变分布。由图可见,弯曲应变主要产生在厚度为1 mm的等强度部分,厚度为2 mm的等截面部分的弯曲应变很小。传统的增加梁表面应变的方法一般是增加梁的厚度或者增大滑块的高度差,但这势必会加大梁和滑块之间的摩擦力,长期往复测量时易因磨损而影响测量精度,而本文这种变厚度的梁结构设计在增加应变量的同时避免了上述缺点。


图3 等强度悬臂梁的结构示意图
Fig.3 Schematic diagram of equal intensity cantilever
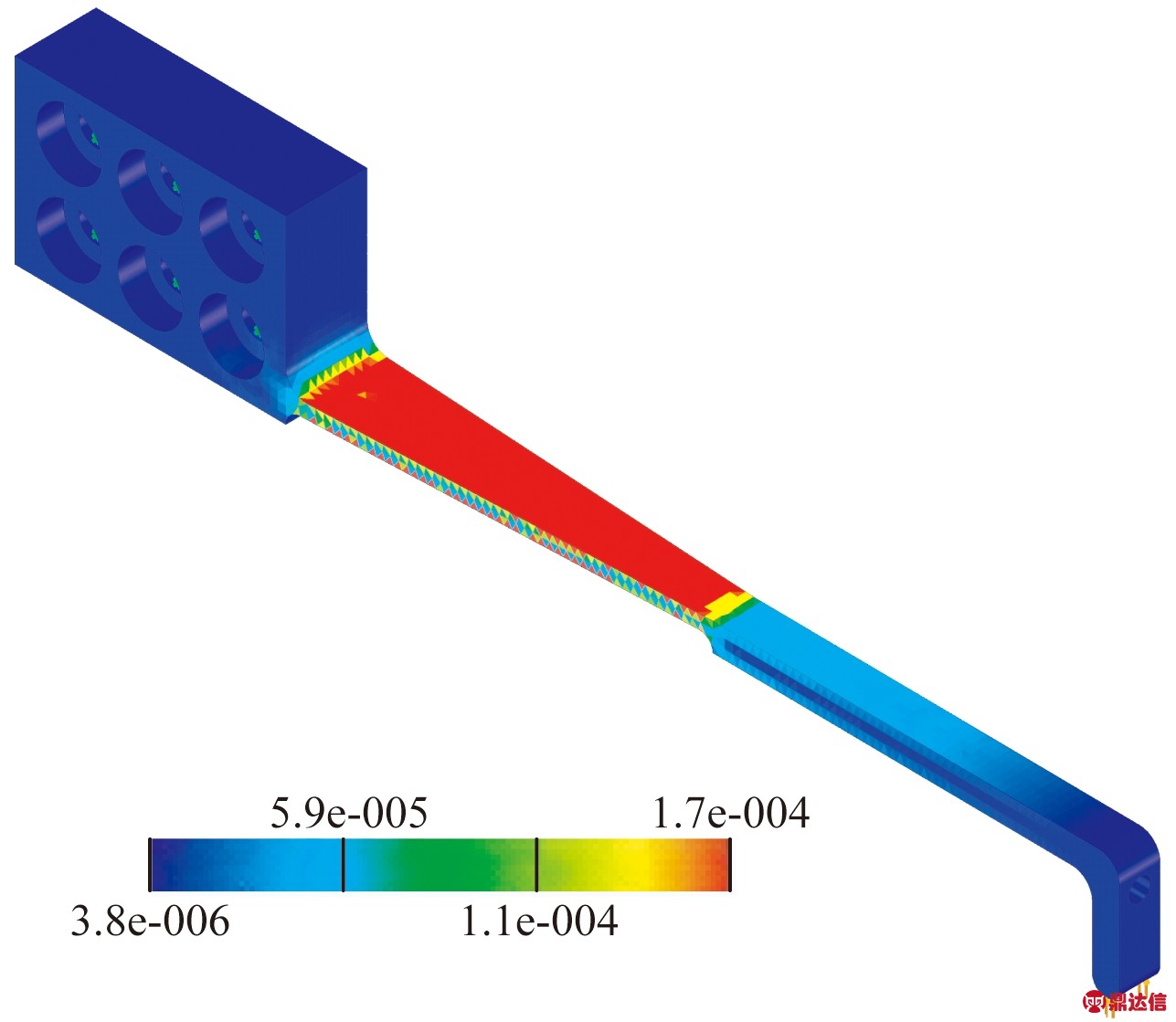
图4 等强度悬臂梁弯曲应变分布图
Fig.4 Distribution pattern of bending strain for equal intensity cantilever
2.2 传感器测量原理
对于初始中心波长为λ的FBG,其波长的漂移量Δλ与它所受到的轴向应变Δε和所处的环境温度变化ΔT之间的关系为:
(1)
其中:αf为光纤的热膨胀系数,ξ为光纤的热光系数,Pe为光纤的弹光系数。常温时Pe≈0.22。
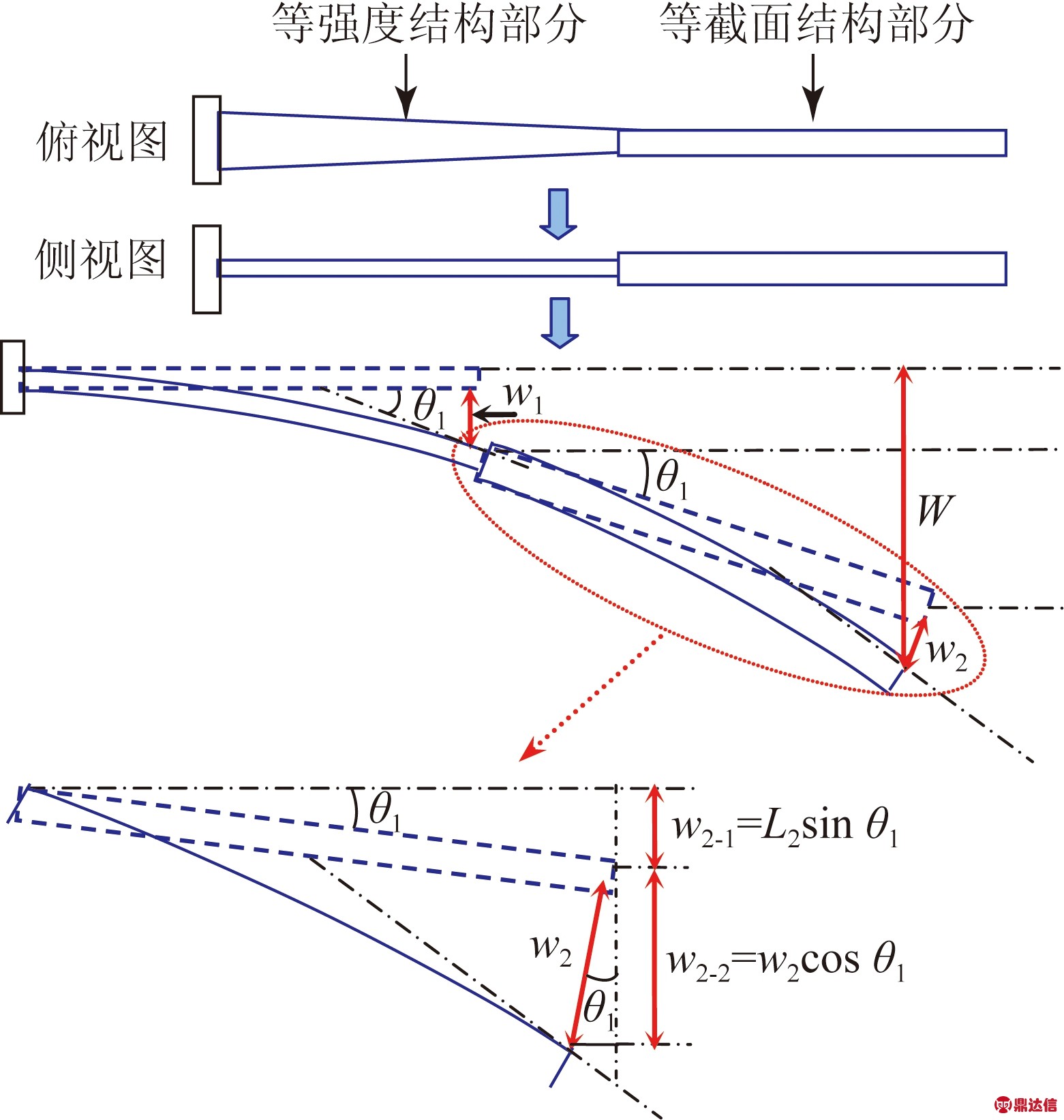
图5 悬臂梁的挠度传递原理
Fig.5 Deflection transfer principle of cantilever
如图5所示,对于变截面设计的悬臂梁,等强度部分与等截面部分的挠度分析方法如下:结合图1和图5,传感器位移测量的变形传递形式为拉杆带动楔形滑块向右滑移,滑块斜面将高度差传递至悬臂梁的自由端,滑块传递的高度差即为梁的总挠度W。由于梁由两种结构形式构成,而FBG1处于梁的等强度部分,故需要得到等强度部分的挠度w1和总挠度W间的理论关系。如图5中梁的挠度变形示意,等强度部分的挠度为ω1,并产生转角θ1,等截面部分的挠度为ω2,但由于存在转角θ1:一方面,等截面部分在该转角作用下自然产生挠位移ω2-1,其值为ω2-1=L2sinθ1;另一方面,ω2的方向与总挠度W的方向存在夹角θ1,其在总挠度方向的投影才是有效挠度,为ω2-2=ω2cosθ1,故W=w1+w2-1+w2-2,即有:
ω1=W-L2sinθ1-ω2cosθ1.
(2)
等截面部分和等强度部分所受到的作用力F是相等的,结合图3中的参数标示,由材料力学原理直接得到等强度部分的顶部挠度为:
(3)
其中:L1为梁等强度部分的长度,b1是等强度部分固定底端的宽度,h1是厚度,E是梁的杨氏模量。
等强度部分的顶部转角θ1可通过下式推导得出:
(4)
其中:x为等强度部分到固定端的距离;Ix为x处对应的惯性矩,即:
(5)
将Ix代入式(4)并积分可得:
(6)
当x=0时,即梁固定端,转角为0,可得C=0;当x=L1时,顶部转角θ1为:
(7)
由材料力学原理直接得到等截面部分顶部的挠度w2为:
(8)
其中:L2,b2,h2分别为梁等截面部分的长度、宽度和厚度,E不变。
由式(2)、式(3)、式(7)和式(8),可得到楔形滑块传递的总挠度W为:

(9)
对于本文中梁的变形设计,由于θ1较小,sinθ1≈θ1,而cosθ1≈1,那么式(9)可以简化为:
(10)
结合悬臂梁的实际设计参数:b1=6 mm,b1=3 mm,L1=L2=30 mm,h1=1 mm,h2=2 mm,可得式(10)右侧三项的比值为6∶12∶1,因此,ω1与总挠度W的关系为ω1=(6/19)W。
最后,结合到等强度部分的表面应变ε和挠度ω1之间的关系ε=h1ω1/L12,以及由滑块几何结构得到的被测对象的位移S与斜面倾角θ、滑块引起总挠度W之间的关系W=Stanθ,可以得到传感器的被测位移S和FBG1所在的梁表面应变之间的理论关系为:
(11)
FBG1的波长漂移Δλ1是温度和位移两个因素共同作用的结果,由于FBG1为粘贴封装,FBG2为自由状态,二者的温度灵敏度系数必然差异较大。对二者实施温度测试,得出温度灵敏度系数的比值kT,则由位移作用引起的波长漂移为Δλ1-kTΔλ2,联立式(1)和式(11),即可得出被测位移S与FBG波长漂移量之间的关系为:
(12)
由式(12)易知,被测位移S与FBG1的波长漂移Δλ1呈线性关系。
3 性能测试与分析
根据FBG位移传感器的结构设计可知,楔形滑块总长度为110 mm,斜面两端的高度差为4 mm,基座内的滑槽长度为210 mm,即传感器的设计量程达到了100 mm,滑块和梁的材料选用具有良好回弹特性和耐磨性的某合金钢。FBG1和FBG2的中心波长分别为1 550.865 1 nm和1 548.984 2 nm。图6为加工制造出的FBG位移传感器照片。
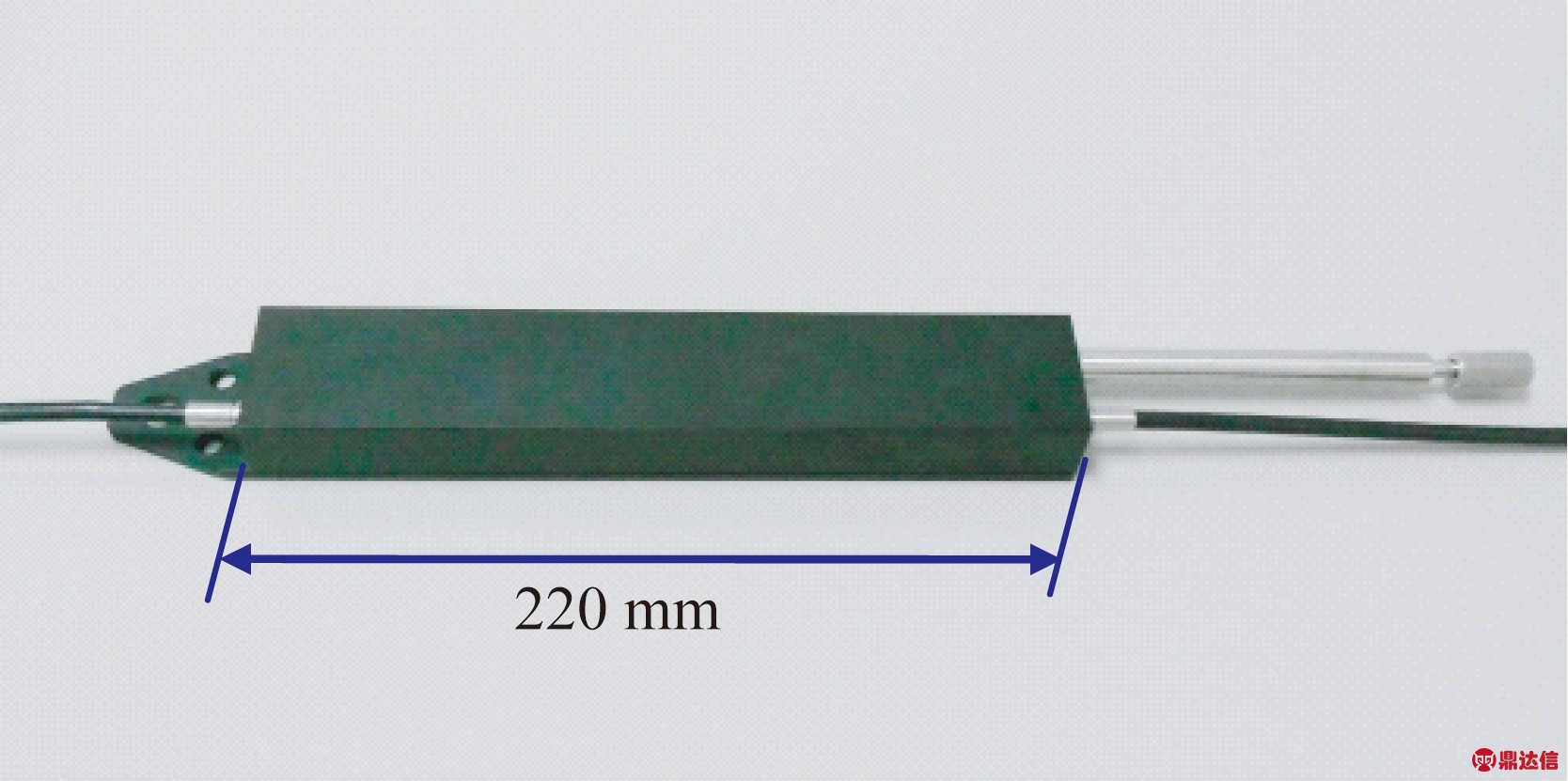
图6 光纤光栅位移传感器照片
Fig.6 Photo of proposed FBG displacement sensor
采用课题组研制的FBG波长解调器记录各测试实验过程中两个FBG的波长,解调器的带宽为1 520~1 600 nm,波长分辨率为0.1 pm,经长期运行测试,精度能够达到2 pm。
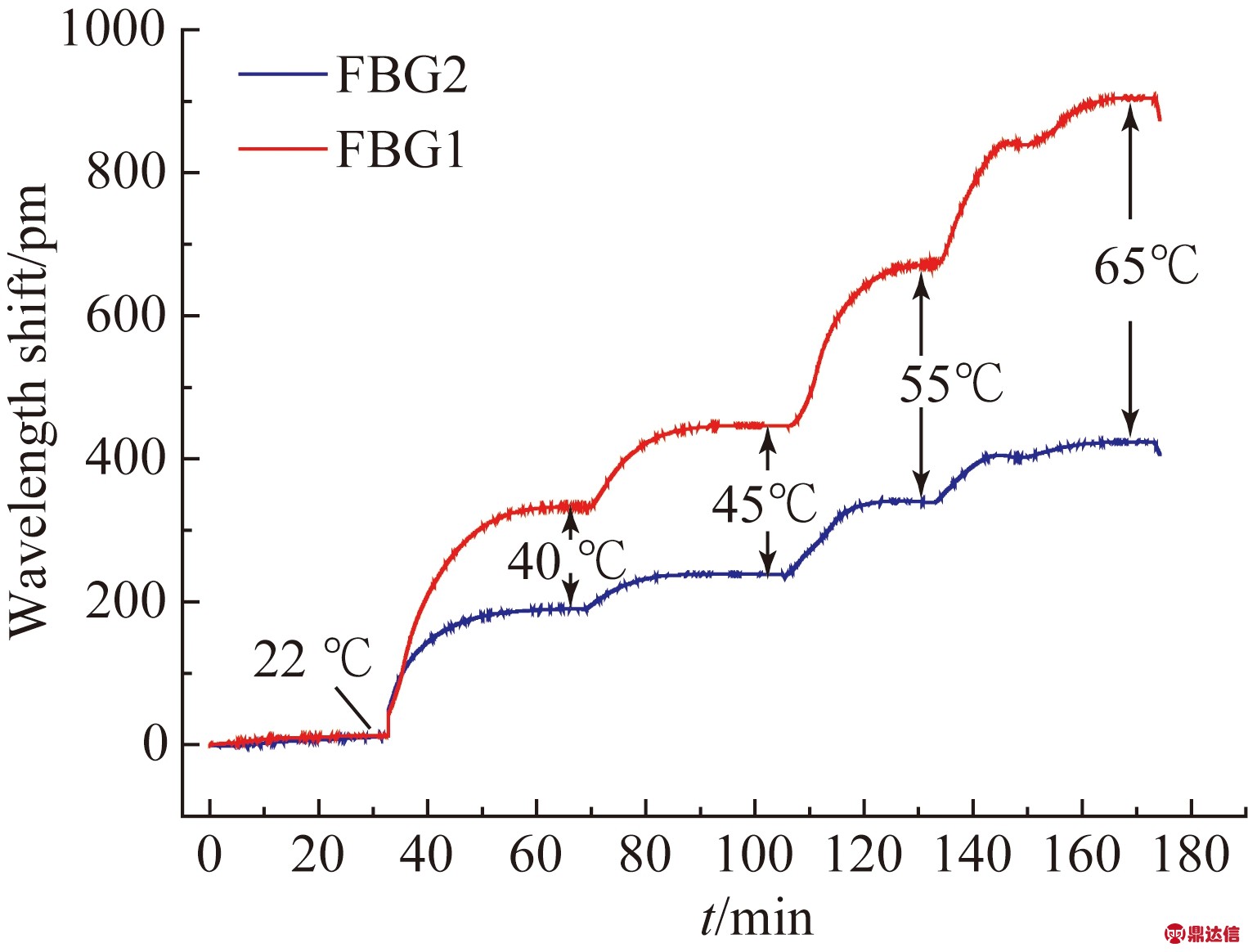
首先对传感器进行了温度补偿特性测试,以得出FBG1与FBG2的温度灵敏度系数的比值kT。将传感器放入上海圣科公司生产的DHG-9143BS 型恒温测试箱中(分辨率为0.1 ℃,精度为0.5 ℃),解调器以10 Hz的频率实时采集两个光栅的波长值。在尚未加热的室温情况下,待波长稳定后,记录下其温度值为22 ℃。随后,将恒温箱温度依次设定在40,45,55和65 ℃ 4个温度点,在每个温度点处,待两个FBG的波长值稳定后,再继续下一个温度点。图7为整个实验过程中FBG1和FBG2的波长漂移量的时程图,图8为根据每个温度点处稳定后的波长值做出的两个光栅的温度特性拟合曲线。由图中拟合方程易得kT=21.37/10.41=2.051。因此仅由外部位移变化引起的FBG1的波长漂移Δλ1位移=Δλ1总-2.051·Δλ2,这即是传感器的测量输出公式。从图7中两个光栅上升沿的趋势也可看出,FBG2的响应时间较FBG1有些滞后,这是由于FBG2为裸光栅,只感知传感器内部空气的温度,而FBG1粘贴在弹性梁上,对梁在温度变化时的热应变也敏感,因此FBG1比FBG2对温度的响应更快。该补偿方式适用于温度变化速率不大的测量现场。
图7 温度测试时程图
Fig.7 Time-history curve in temperature test
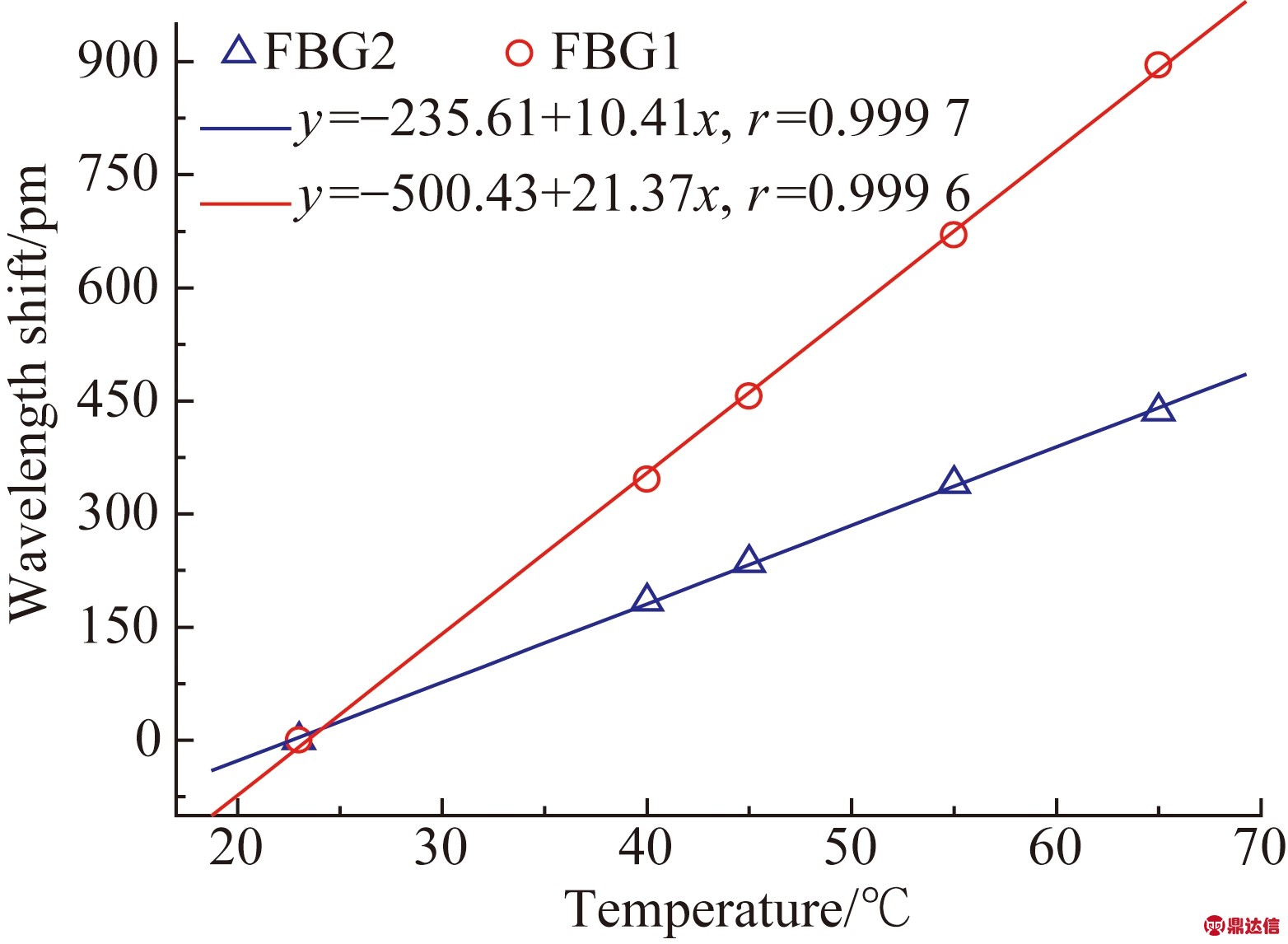
图8 温度特性曲线拟合情况
Fig.8 Curve-fitting of temperature response
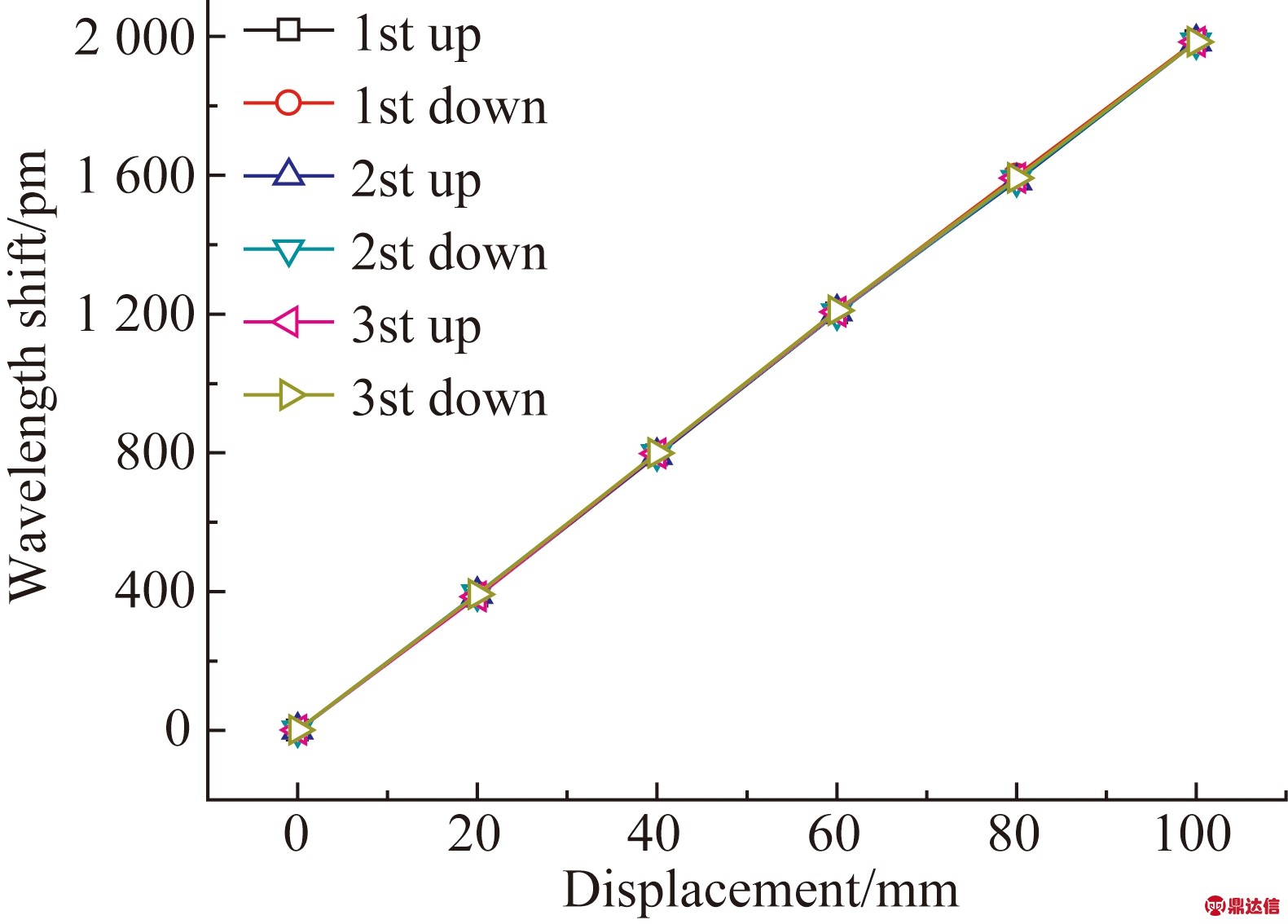
随后对传感器进行了位移测量能力测试。将传感器外壳和游标卡尺的刻度底座一起固定在实验台上。游标卡尺的滑动外卡和传感器的拉杆固定,然后拉动传感器拉伸,根据游标卡尺读取位移量,读数精度达到0.02 mm。以20 mm为步长,依次拉伸拉杆至满量程100 mm,每个位移点处停留3~5 s,待FBG波长稳定,然后再依次减小位移至零,该过程连续测试3个循环,FBG解调器以100 Hz的频率记录下整个实验过程中的光栅波长数据。图9为整个实验过程中传感器输出波长漂移量的时程图,图10为3次循环实验中每个位移点对应的加载、卸载时的波长漂移量。
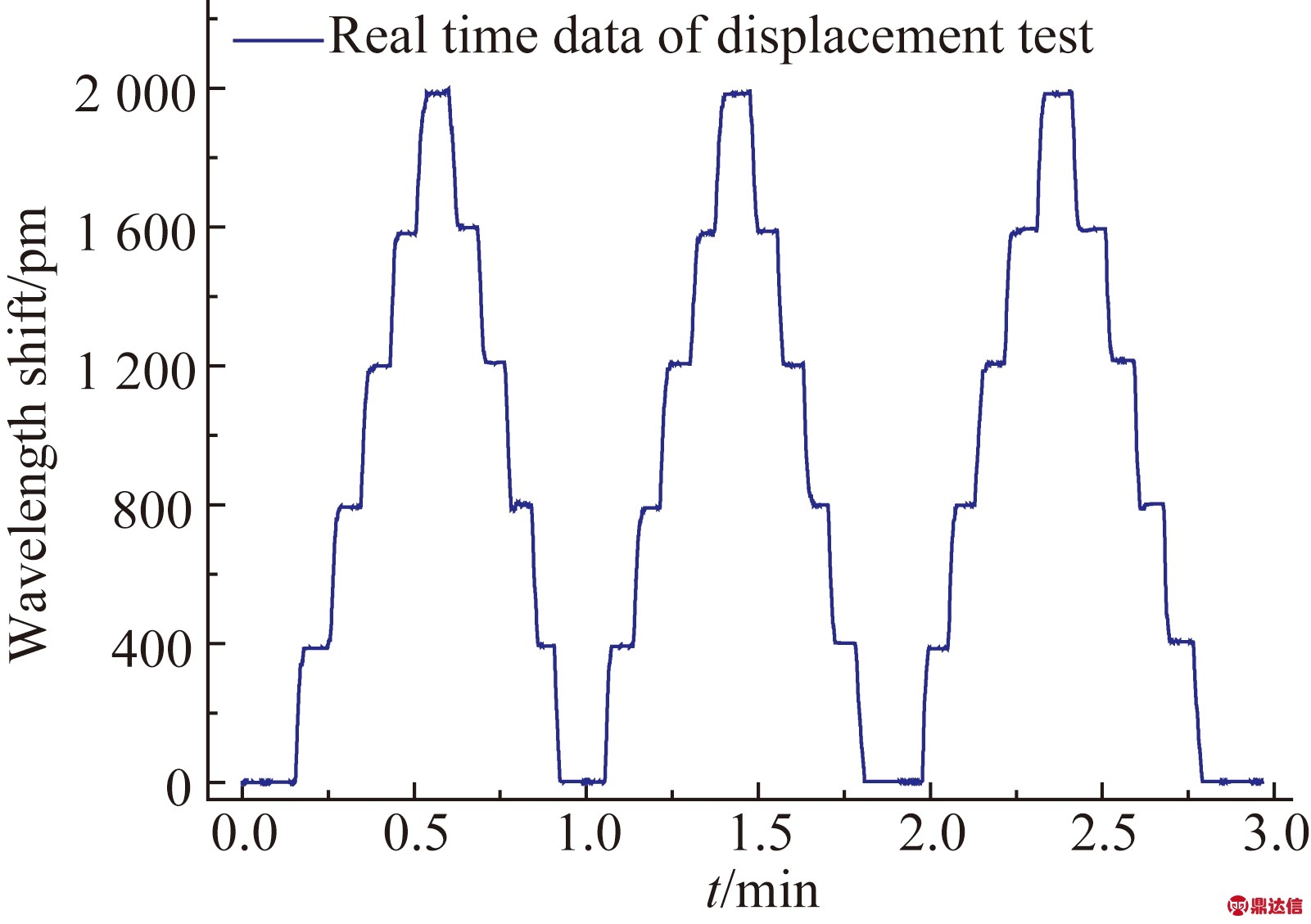
图9 三次位移循环测试时程图
Fig.9 Time-history curve in three loop displacement tests
图10 三次位移循环测试数据图
Fig.10 Experimental result of three loop displacement tests
对6条测试曲线进行算术平均值后再进行线性拟合,结果如图11所示。拟合曲线为y=0.09+20.11x,r=0.999 9,则传感器的位移灵敏度为20.11 pm/mm,且具有很高的线性度,结合解调器2 pm的精度,易得传感器的位移测量精度可达0.099 5% F.S.。结合式(11)和式(1),传感器在最大量程100 mm时,悬臂梁总挠度W为滑块的最大高度差4 mm,易得布置有FBG1的等强度结构表面的应变为1 400 με,对应的FBG1波长漂移量理论值为1 750 pm。根据实验测试结果,传感器100 mm位移处的波长漂移量约为1 945 pm,略大于理论值,这主要由于梁的机械加工精度误差以及FBG1的粘贴布置误差所导致。为测试传感器在微位移作用下的响应,使用螺旋微位移平台(精度为0.01 mm)对传感器实施了以0.5 mm为步长、0~2.5 mm的位移测试,测试结果如图11中的插图所示,拟合斜率为20.18,与20.11仅有微小差别,可见,传感器同样具有良好的微位移测量能力。进一步地,根据3次循环测试的数据,分别计算得到6条曲线的重复性误差仅为0.705%,3次进程回程循环中最大的迟滞仅为0.403%。
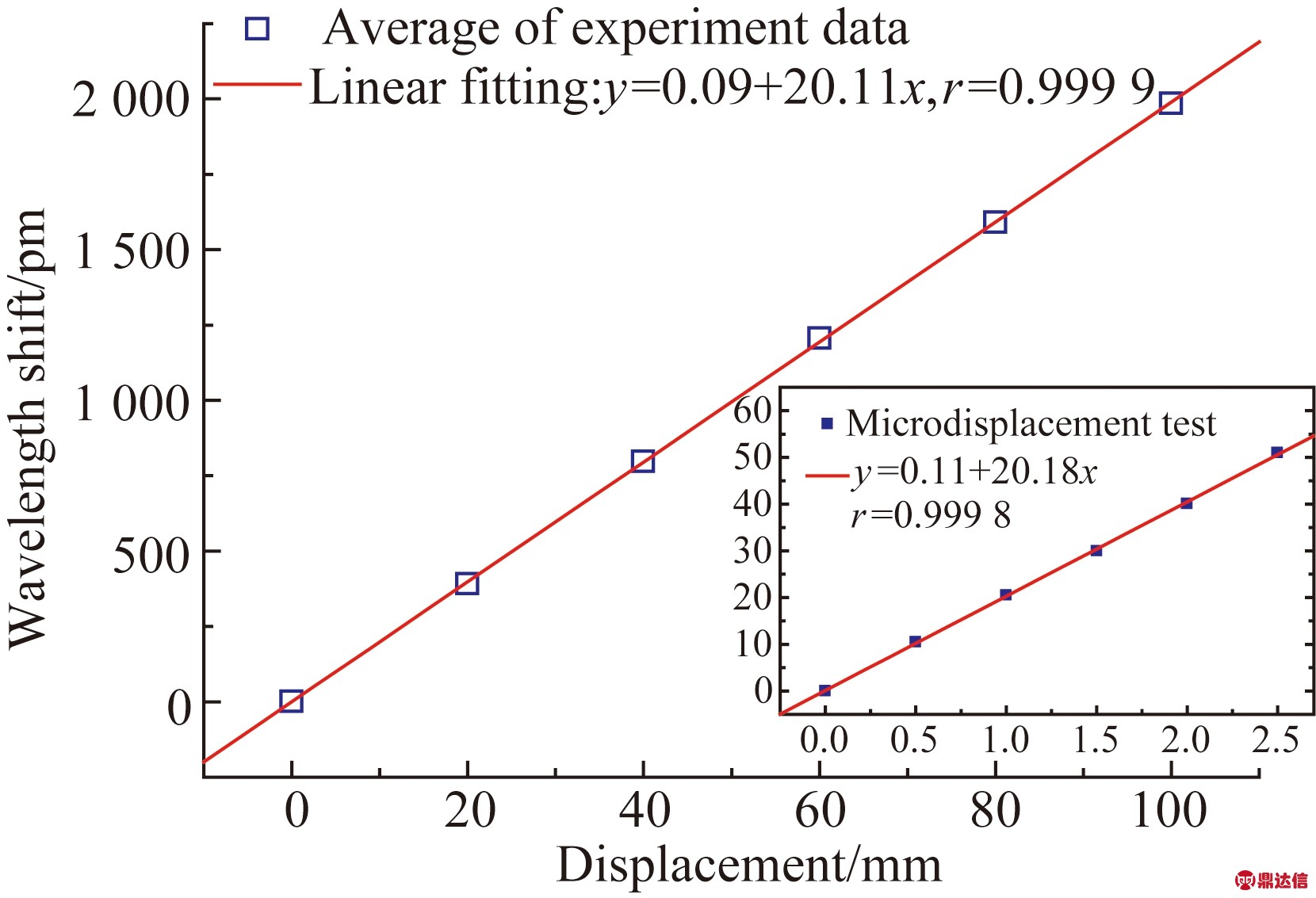
图11 三次试验的均值拟合情况以及微位移测试情况
Fig.11 Linear fitting of average of experiment data and result of micro displacement test
传感器测量的蠕变性能对其长期监测的准确性有重要影响,最后对传感器开展了蠕变特性测试。将拉杆拉伸至某一位移处并固定,保持超过10 min时间后再恢复至零值状态,以50 Hz频率记录数据。图12为整个实验过程中传感器的波长漂移量时程图,可见波长漂移量表现出良好的稳定性,选取其中3~4 min时间段的数据放大后发现,波长的上下波动量在2 pm内,在解调器自身波长测量精度的波动范围内,说明传感器具备良好的抗蠕变性。
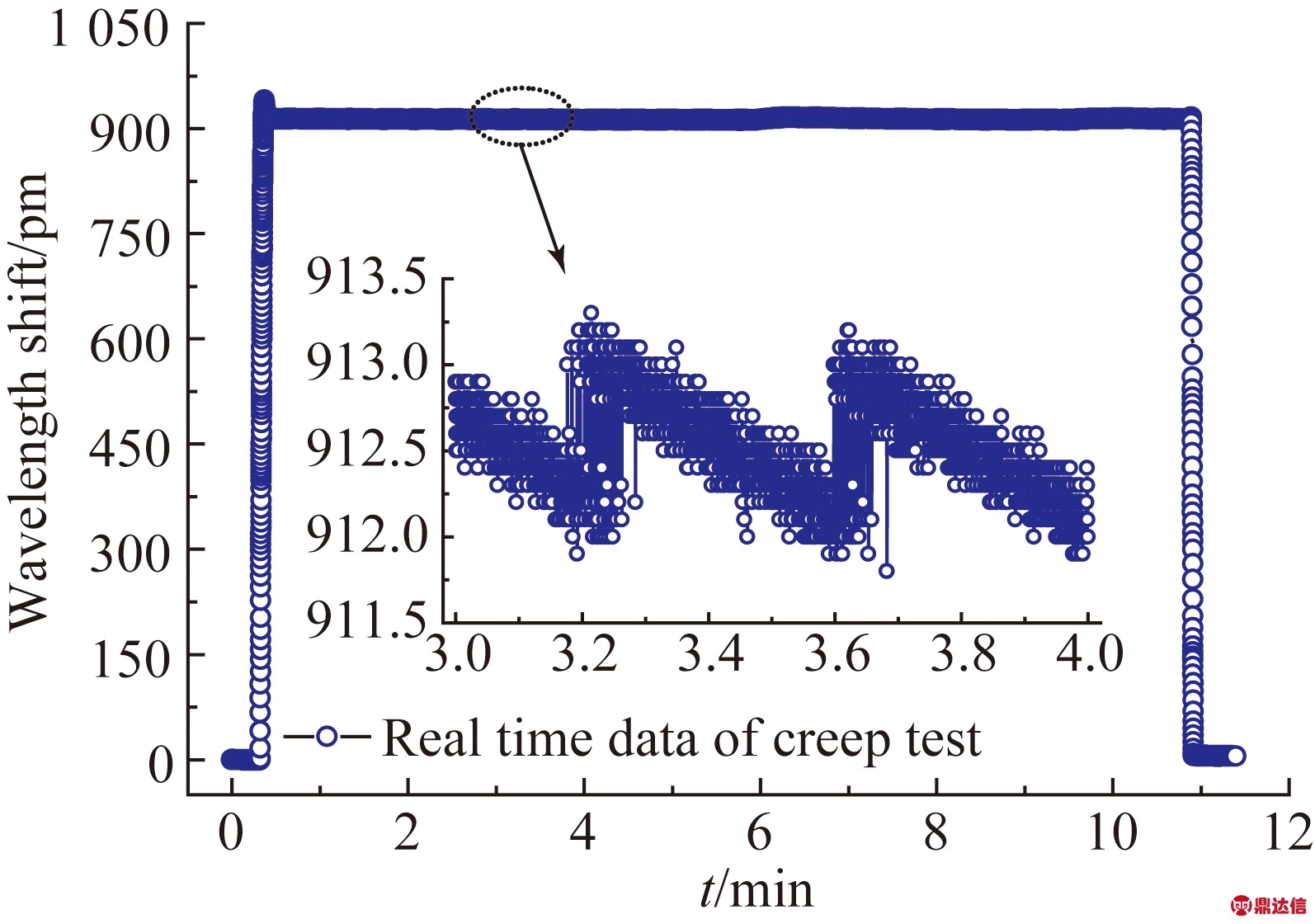
图12 位移测量的蠕变性能测试结果
Fig.12 Result of creep performance test for displacement measurement
4 结 论
本文研究了一种核心零部件经过特殊设计的滑动式FBG位移传感器,该传感器具有抗滑动干扰性、FBG对梁挠位移的高灵敏测量以及长期往复测量的耐磨性等优势。在详细阐述了传感器的测量原理、核心部件结构、温度补偿原理的基础上,加工制造了传感器原型并开展了性能测试。测试结果表明,FBG位移传感器的量程达到100 mm,灵敏度为20.11 pm/mm,精度可达0.099 5% F.S,同时具有优越的测量重复性、低迟滞、抗蠕变以及良好的微位移测量能力等优点适用于重大工程与装备的结构健康监测,具有广阔的应用前景。


