
摘 要:针对目前烟草抑芽剂施用现状,设计了烟草抑芽剂智能对靶施药系统,该系统主要由支架、测速传感器、烟秆检测传感器、步进电机、卷轴、电磁阀、滑块、滑轨、单向阀、喷管、行程开关、单片机系统等组成。测速传感器可对机组的作业速度实时检测,单片机系统根据检测的机组作业速度控制步进电机的转速、根据电磁阀开启时间控制步进电机的转角,并根据烟草茎秆信号的有无控制电磁阀开闭,实现了烟草抑芽剂的智能对靶施药。对烟草抑芽剂智能对靶施药系统进行了室内试验,结果显示:试验台运动速度越慢(0.3~0.45 m/s),收集药量Qs≥15 m L的比例越高,施药效果愈好;随着药泵压力的升高,收集药量呈缓慢下降趋势。样机田间试验结果表明:设计的烟草抑芽剂智能对靶施药系统工作准确可靠,满足使用要求。
关键词:烟草,农药,智能系统,抑芽剂,对靶施药,控制系统
0 引 言
烟草进入生长后期后,其生长中心是顶部花部器官的生长,为防止营养物质大量流向顶端花序,要对烟草进行打顶。烟草打顶后,如果不及时喷施抑芽剂,烟株的每个叶腋部位可再生2~3个腋芽,腋芽的生长同样会消耗大量养分,影响主茎叶片的产量和质量[1]。因此,烟草打顶后要及时喷施抑芽剂,打顶当天完成效果更好。由于抑芽剂具有高残留的特性,因此抑芽剂不能喷施到烟草叶片上,通常的喷雾机械不能使用。目前中国烟草抑芽剂施用全部由人工涂抹完成[2],工作效率极低(仅为330 m2⁄h)。
手工涂抹抑芽剂费工费时,烟农的劳动强度较大,这与高速发展的现代农业生产机械化极度脱节,且劳动力成本逐年增加,抑芽剂施用工序已成为影制约烟草产业发展的重要因素,烟农迫切需要实现烟草抑芽剂施用的机械化作业。
发达国家在20世纪70年代就开始了精准施药技术的研究。目前,国内外多所科研机构分别利用卫星导航技术、光机电一体化和自动控制技术[3]、传感器技术[4]、图像处理技术[5]等现代科学技术研制成功了自动对靶喷雾机和精确施药系统,实现了农药精确对靶喷雾。而国内未见对烟草抑芽剂对靶施药技术研究的报导。本课题研究的目的在于在借鉴国内外先进对靶施药技术[6-20]的基础上,通过对相关技术的集成和创新,针对烟草抑芽剂施用特点及要求,研究开发烟草抑芽剂自动对靶施药系统。
1 结构及工作原理
抑芽剂智能施药系统由对靶装置和控制系统 2部分组成。
1.1 烟草抑芽剂对靶装置
烟草抑芽剂对靶喷药装置结构如图1所示。主要包括支架、步进电机、卷轴、钢丝绳、电磁阀、滑块、滑轨、单向阀、喷管、动滑轮等。喷管安装在滑块下方,单向阀通过管道与电磁阀相连。
钢丝绳一端与滑块相连,另一端绕过卷轴,从滑轨底部穿过绕过动滑轮,与滑块另一端连接。调节动滑轮与滑轨的高度,使上面的钢丝绳与滑轨处于平行状态。卷轴逆时针转动时,钢丝绳拉动滑块向左运动,反之,卷轴顺时针转动时,滑块向右运动。
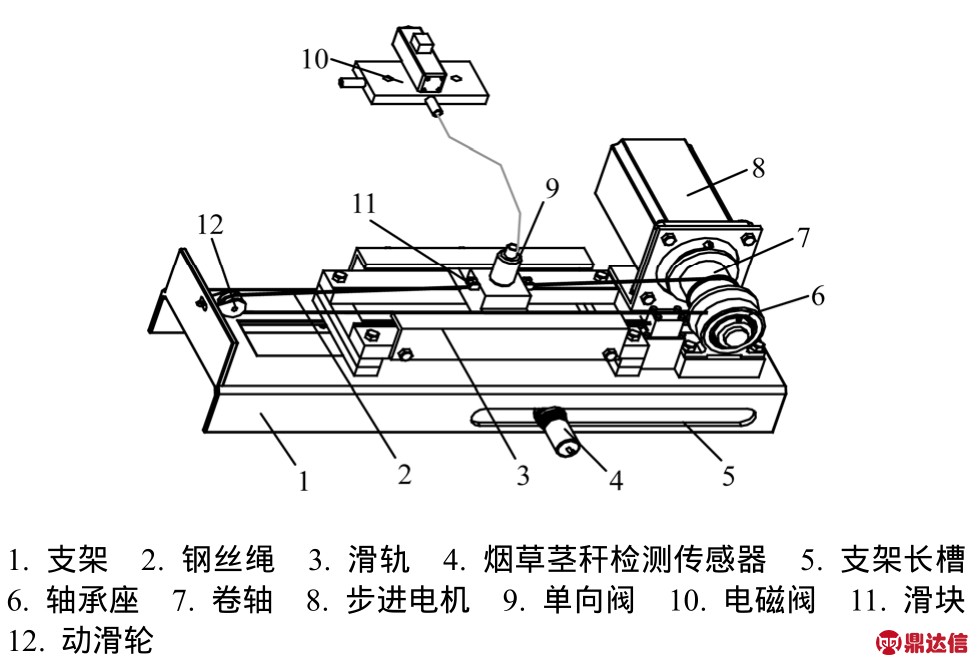
图1 抑芽剂对靶装置结构示意图
Fig.1 Sketch map of spraying device on target
1.2 对靶施药控制系统设计
控制系统主要有单片机系统、测速模块、烟草茎秆检测模块、电磁阀控制模块、步进电机控制模块、行程开关等组成,如图2所示。烟草茎秆检测传感器安装在图1所示支架长槽中,其安装位置可前后调节。测速传感器安装在机组的行走轮轴上。
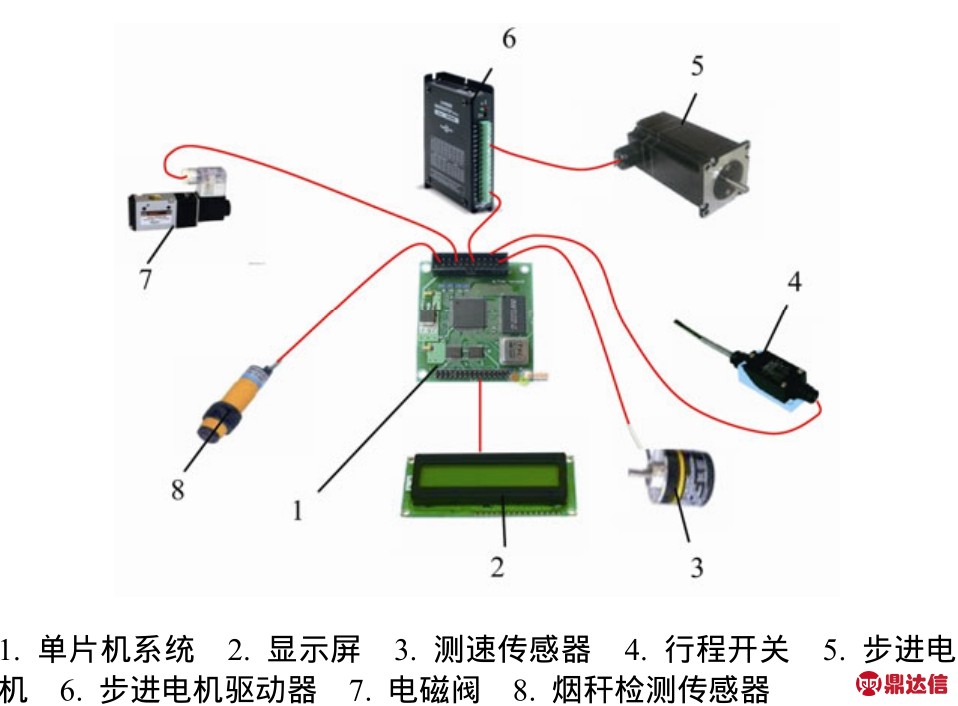
图2 控制系统组成
Fig.2 Composite diagram of control system
测速传感器和烟秆检测传感器可实现对机组行进速度和烟秆信号的实时监测,机组行进速度由液晶显示屏实时显示,单片机系统根据烟秆检测信号的有无控制电磁阀的开闭,根据测定的机组行进速度和喷药时间控制步进电机的转速和转角。
1.3 电路设计
显示器采用19264液晶,它主要由行驱动器与列驱动器组成,可显示192(列)×64(行)点阵。可完成图形显示,也可显示12×4个(16×16点阵)中文汉字。其电路如图3a所示。
烟草茎秆检测传感器采用光电传感器,当传感器检测到烟草茎秆后单片机就要准备进行喷药动作,光电开关电路如图3b所示。
喷药电磁阀由单片机通过三极管驱动继电器进行控制,电路如图3c所示。
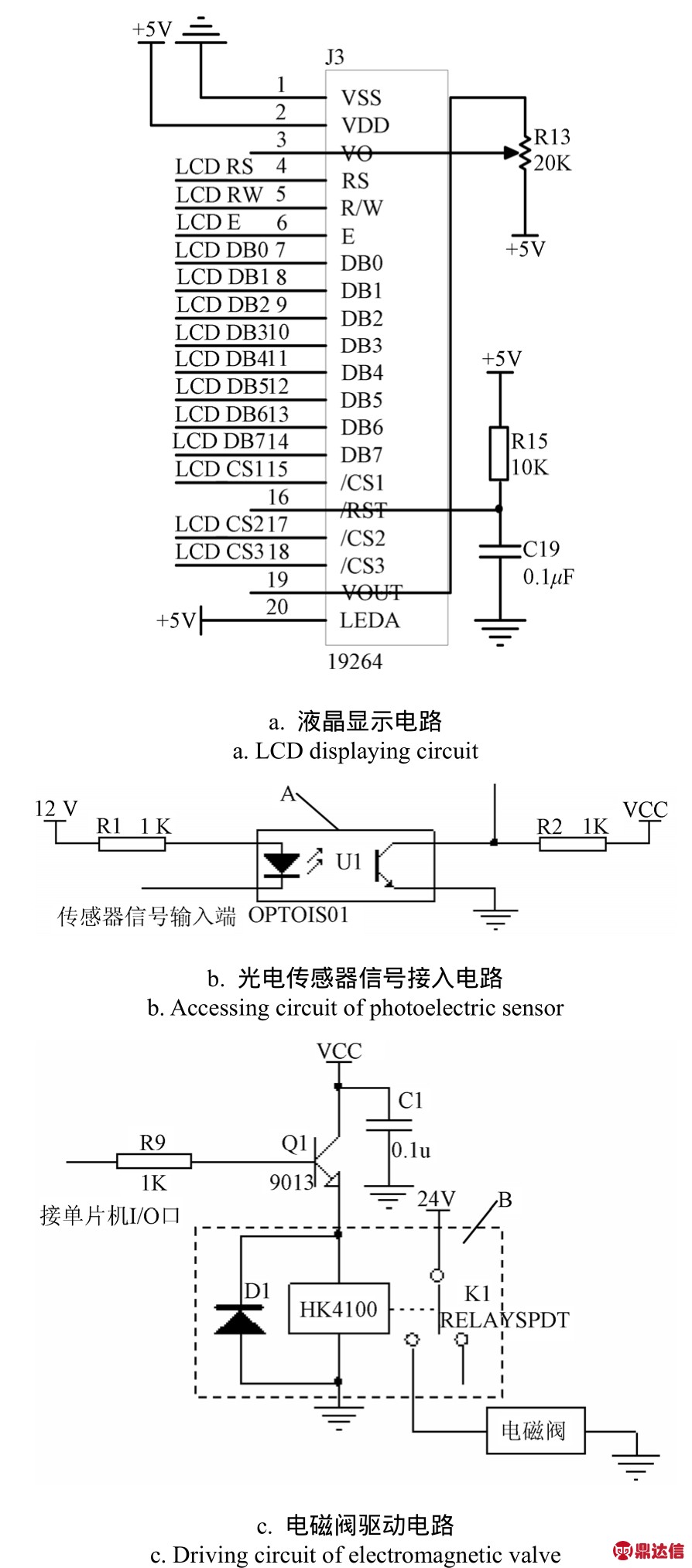
图3 控制系统主要电路
Fig.3 Main circuit of control system
注:A为光偶;B为继电器。
1.4 烟草抑芽剂对靶施药系统工作原理
对靶试验系统的工作流程如图4所示。烟秆检测传感器采用 E3F-DS30C4型漫反射式光电传感器。工作时,首先对系统进行初始化,烟秆检测传感器开始信号检测,无检测信号时,传感器发射管发出去的光不能由接收管接收到,传感器信号端输出高电平,反之,传感器信号端输出低电平;测速传感器转动时输出脉冲信号,单片机对脉冲计数、进行转换计算得到机组行进速度,并根据行进速度换算步进电机的转速,根据行进速度和预先设定的电磁阀通电时间计算步进电机的转动角度。
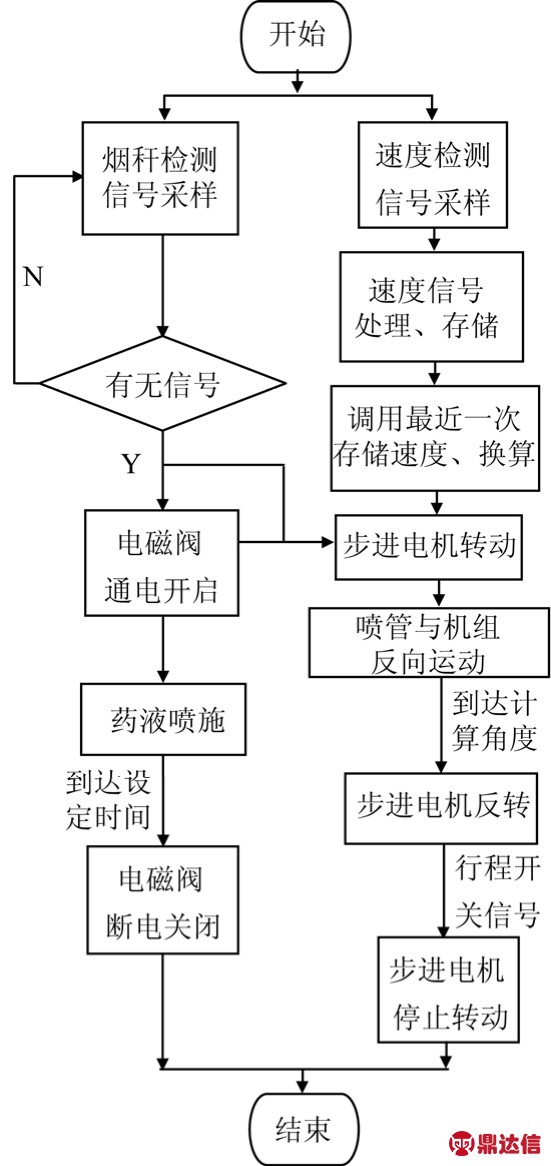
图4 对靶施药系统工作流程
Fig.4 Flow chart of spraying system on target
当烟秆检测传感器检测到烟秆信号,即传感器信号端输出低电平时,一方面电磁阀继电器闭合,电磁阀通电开启,实施喷药;另一方面步进电机驱动器以一定的频率向步进电机输出脉冲信号,使步进电机按计算出的转速转动,钢丝绳拉动滑块和喷管匀速向机组前进方向相反的方向运动(喷管的运动速度与机组作业速度相同,方向相反),使喷药过程中喷管始终对准烟草茎秆,实现对靶施药。当步进电机转到计算出的角度时,喷药结束,步进电机反转,直到滑块撞击到行程开关,行程开关信号端输出低电平,单片机接收到低电平信号,控制步进电机停转,喷管和滑块回到初始位置,等待下一次工作信号。
2 室内试验
2.1 试验设计
1)试验目的:每株烟草需用抑芽剂15~20 m L,本试验的目的是检验智能对靶施药系统喷到每株烟秆上的药量是否满足要求,并确定相关参数的最优值。
2)试验装置:试验装置如图 5所示。智能施药系统安装在固定台架上,当调速电机拉动试验台沿轨道运动时,测速传感器实时监测试验台运动速度并在显示器上显示,烟草茎秆检测传感器安装在与滑块处于最前端时喷管横向对齐位置,其安装位置前后可调。
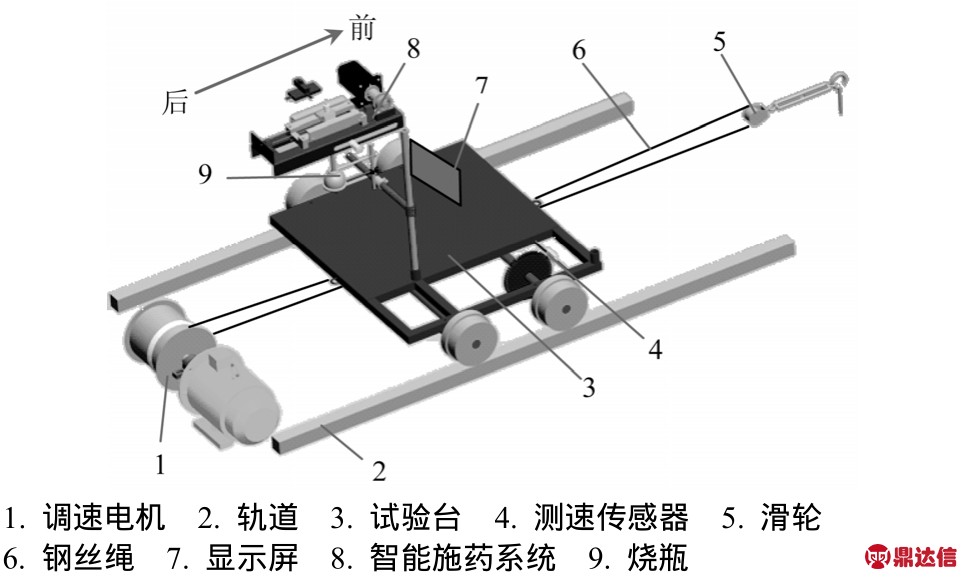
图5 智能施药系统室内试验装置
Fig.5 Experiment device of intelligent spraying system indoor
3)试验方法:试验时,烧瓶称取质量并清 0(因打顶处烟杆直径为10 mm左右,所以本试验中选用口径为10 mm的烧瓶),安装到试验台上,调整其安装位置使试验台从智能施药系统下方经过时烧瓶处于喷管正下方1~2 cm处,调节调速电机转速使试验台按设定速度在轨道上运动,当烟草茎秆检测传感器检测到烧瓶的信号时,步进电机开始工作,喷管与试验台同向运动,电磁阀通电喷药,记录此时试验台行进速度,喷药结束,取下烧瓶称取质量并记录烧瓶收集药量。用烧瓶收集的药量模拟喷施到烟秆上的药量。
4)试验指标:收集药量Qs,m L。
5)试验因素:试验台运动速度v,m/s;取0.3、0.4、0.45 m/s 3个水平;药泵压力P,MPa,取0.25、0.35、0.55 MPa 3个水平。
本试验采用单因素试验法。
2.2 试验结果
图6是药泵压力为0.25 MPa、试验台运动速度分别0.3、0.4、0.45 m/s时收集药量的分布情况。
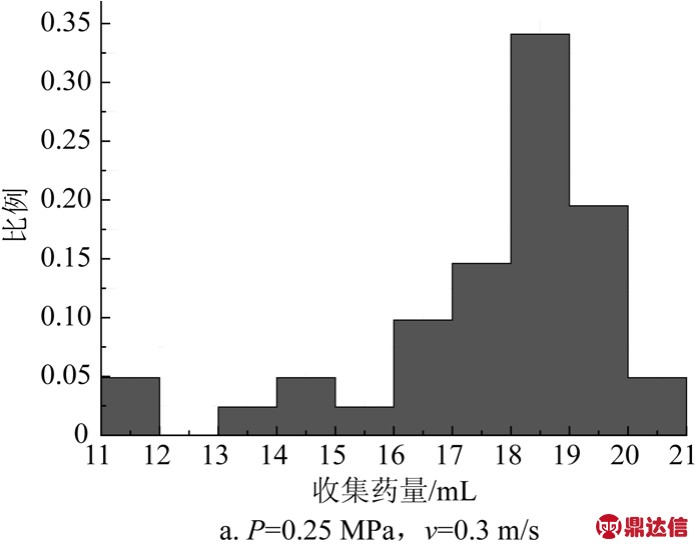
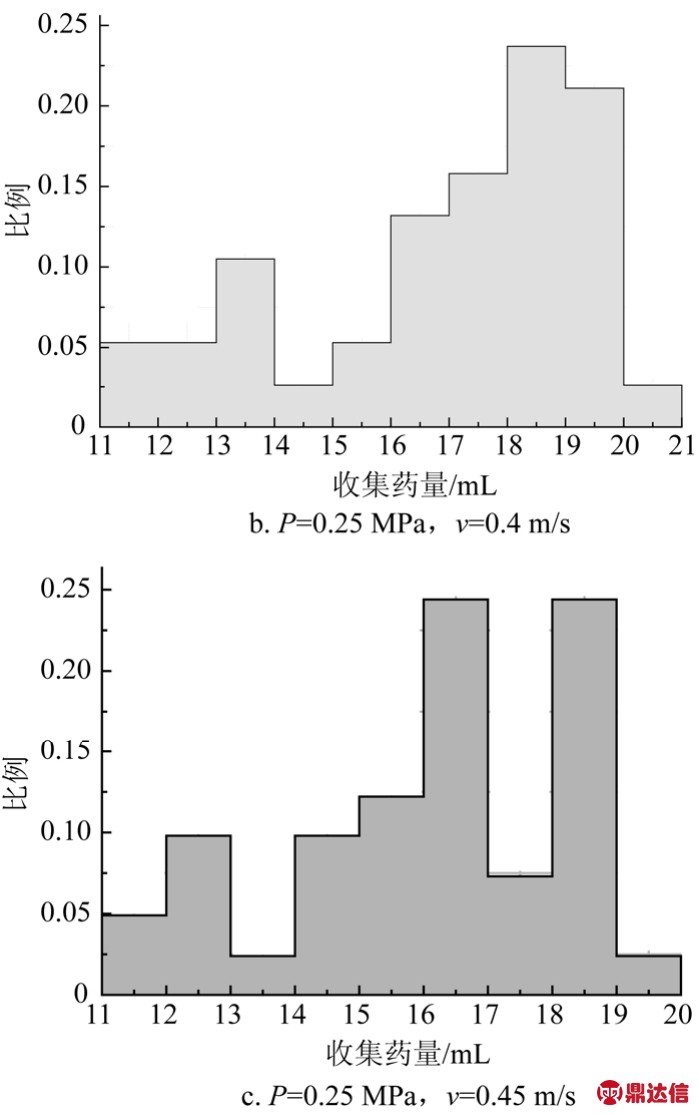
图6 收集药量分布情况
Fig.6 Distribution of collecting solution
注:P为药泵压力,v为试验台运动速度,分别试验40次。
由图6可以看出:试验台速度0.3 m/s时,收集药量Qs≥15 m L的比例占85.3%;试验台速度0.4 m/s时,收药量Qs≥15 mL的比例占81.7%;试验台速度0.45 m/s时,收集药量Qs≥15 m L的比例占70.7%。可知,试验台运动速度越慢,施药效果愈好,试验台运动速度超过0.4 m/s,收集药量Qs≥15 m L的比例迅速降低。表1是药泵压力为0.25 MPa时,试验台运动速度对收集药量影响的方差分析结果。由分析结果可知:速度对收集药量的影响显著。
表1 试验台运动速度对收集药量影响的方差分析
Table 1 Analysis of variance for collecting solution affected by velocity

注:F0.01=4.48>F=4.09>(3.07=F0.05),试验台运动速度对收集药量影响显著。
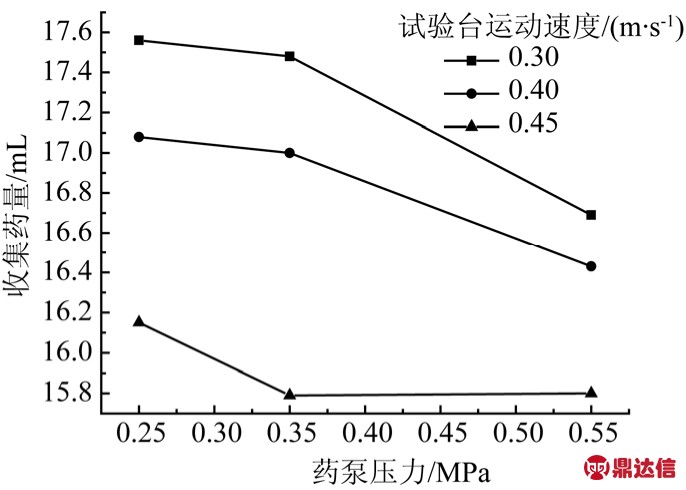
图7 压力对收集药量的影响
Fig.7 Influence of pressure for collecting solution
注:试验次数35~50次。
图7是药泵取不同压力时收集药量情况。可知:随着药泵压力的升高,收集药量呈缓慢下降趋势。表2是试验台运动速度0.4 m/s时,药泵压力对收集药量影响的方差分析结果。由分析结果可知:压力对收集药量无明显影响。
表2 药泵压力对收集药量影响的方差分析
Table 2 Analysis of variance for collecting solution affected by pressure
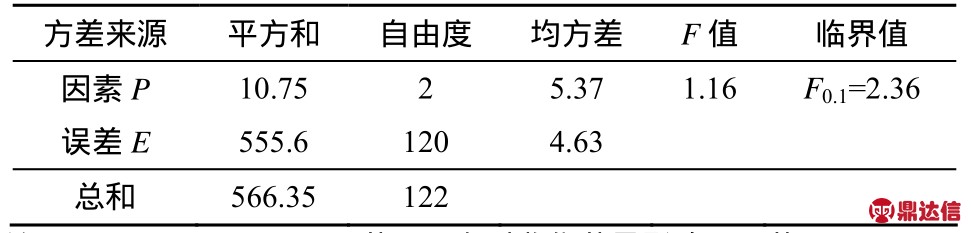
注:F=1.16<(2.36=F0.1),药泵压力对收集药量影响不显著。
3 样机田间试验
样机田间试验于2011年7月在潍坊昌邑烟田进行。
3.1 试验条件与方法
试验田块面积0.5 hm2,烟草品种为中烟100,垄作种植,无倒伏现象,烟草打顶高度1 180 mm,行距1 000 mm,株距500 mm,抑芽剂智能施药系统与烟草打顶机配套作业。根据室内试验结果,药泵工作压力取 0.25 MPa,机组作业速度取 0.33~0.38 m/s,共测试8组,每组烟草100株。对样机的工作情况进行跟踪记录。图8是样机正在进行田间试验。

图8 样机田间试验
Fig.8 Field experiments of prototype
3.2 试验结果与分析
试验过程中样机运转平稳,测速传感器可实时检测机组作业速度并在显示屏显示,烟秆检测传感器能够及时检测烟秆信号,喷管在喷药过程中始终对准烟秆,步进电机和行程开关工作准确可靠,过程顺畅,满足烟草抑芽剂对靶施药的要求,生产率较人工提高近4倍。表3是样机性能测试结果。
表3 样机性能测试试验结果
Table 3 Test results of prototype
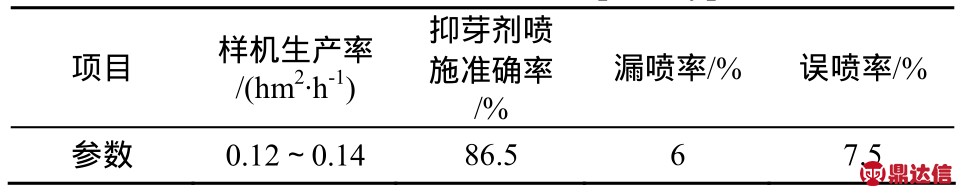
漏喷的原因是偶有烟草植株倾斜较为严重,没有被收拢至抑芽剂对靶施药系统;误喷的原因是有些烟株顶部叶片与烟秆没有分离开,导致烟草茎秆检测传感器首先检测到烟草叶片信号,出现误喷。
4 结 论
1)采用机光电一体化和自动控制技术,设计了烟草抑芽剂智能对靶施药系统。该系统可根据烟草茎秆信号的有无控制电磁阀开闭,根据机组作业速度控制喷管运动速度,使喷管在喷药过程中始终对准烟秆,实现了药液的智能对靶喷施。
2)室内试验表明:试验台运动速度(0.3~0.45 m/s)越慢,施药效果愈好;当试验台运动速度v>0.4 m/s时,收集药量Qs≥15 m L的比例迅速降低;速度对收集药量的影响显著。随着药泵压力的升高,收集药量呈缓慢下降趋势;压力对收集药量影响不明显。
3)田间试验结果显示:开发设计的烟草抑芽剂智能对靶施药系统工作准确可靠,喷施准确率可达86.5%,满足使用要求;该对靶施药系统生产率较人工提高近4倍。


