
1 引言
从1950年开始,高楼大厦的外围建设倾向于使用玻璃幕墙而不再使用泥土,由于玻璃幕墙的美观与隔音、隔热、隔风等实用性,被广大民众与建筑设计师所喜爱,玻璃幕墙也成为高楼大厦的一个重要标志[1]。擦洗玻璃的传统方法是清洁工人站在窗户旁边或悬吊机构上依靠清洁剂与清洁工具结合清洗玻璃壁,这种方法耗费时间,综合成本高,安全系数低,而高层建筑幕墙清洗作业量大面广,且适合实现自动化。
目前国内外基本尚处于人工清洗阶段[2]。提出了一种高效的玻璃清洁机器人,代替人工清洗玻璃的工作,能够在高空的玻璃壁上自动完成清洗的工作,提高清洗工作的效率,降低事故发生率。从吸附系统、行走系统、清洗系统几个方面对该机器人进行阐述。
2 吸附系统
玻璃清洁机器人通过安全线固定在建筑的某一点后,首先必须实现吸附在玻璃壁上的功能。目前应用于玻璃清洁的机器人吸附方式主要有磁式吸附、负压吸附、螺旋桨吸附。三种方式的原理都是通过不同的方式使玻璃清洁机器人对玻璃壁面施加正压力则得到玻璃壁面的反作用力,进而产生摩擦力克服机器人的重力,以至于玻璃清洁机器人吸附在玻璃壁面,原理如图1所示。
设定玻璃清洁机器人的质量m=5 kg,玻璃清洁机器人与玻璃壁面之间的摩擦系数μ为0.2,根据力的平衡原理可知吸附力F>mg/μ,即F>5 kg×9.8(N/kg)/0.2,那么吸附力必须大于245 N。
磁吸附的原理是通过永磁铁或电磁铁对导磁壁面材料产生的吸附力,从而产生对玻璃壁面的正压力,并依靠机器人与壁面间的摩擦力克服重力。磁吸附式机器人不受壁面凹凸不平或裂缝的限制,相较于真空吸附、推力吸附等吸附方式而言,对工作环境具有更好的适应性,但只适用于导磁性材料构成的壁面。负压吸附的原理是通过真空泵对真空吸盘内抽取空气,从而真空盘内形成负压,进而对玻璃壁面形成正压力,并依靠机器人与壁面间的摩擦力克服重力。负压吸附具有结构简单容易集成、噪声小等优点,但对玻璃壁面的表面光洁度与透气性有严格的要求。螺旋桨吸附的原理是将几个螺旋桨按一定角度设置于玻璃清洁机器人内,利用螺旋桨旋转时产生的推力转化为玻璃清洁机器人对玻璃壁的正压力,克服重力。螺旋桨吸附的方式不受玻璃壁面材料的限制,对壁面具有高适应性。
由于玻璃壁面大多数不是导磁性材料,表面平整,而且考虑到待清洁的玻璃面表面光洁度低,因此采用螺旋桨的吸附方式,使玻璃清洁机器人对玻璃有高适应性、速度快、对墙壁的吸附力强等优点。
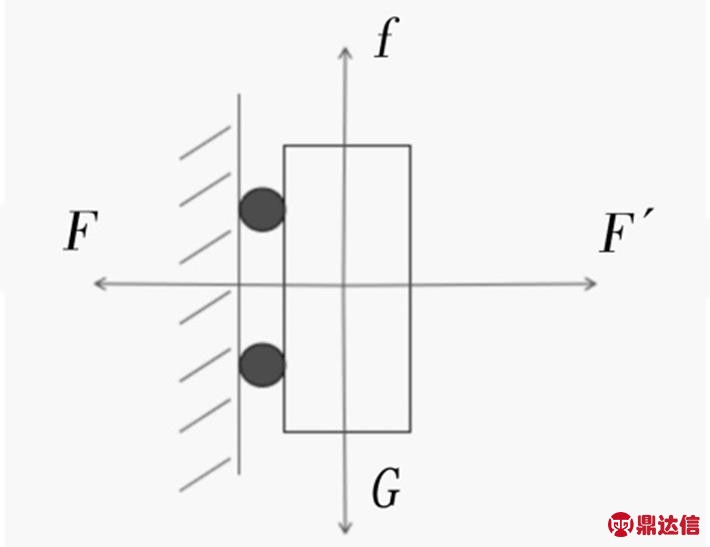
图1 吸附原理图
3 行走系统
玻璃清洁机器人需要具备行走能力才能完成全区域的清洁工作。现有的移动行走系统大致分为足式行走方式、履带式行走方式、轮式行走方式。各种方式具有不同的结构,具有不同的特性,适合不同的工作环境。
足式行走方式采用有多个仿生机械足来模拟多足动物的行走,仿生机械足可以在机器人附近地面的任意点接触,有利于承载较大的负荷。同时,足式移动机构对崎岖壁面具有很好的适应能力,可以跨越障碍物。另外,足式行走方式还具有隔振能力,尽管壁面高低不平,机器人的运动仍然可以相当平稳。但足式行走机构相当复杂且控制难度大,理论模型难以构建。
履带式行走方式的车轮不与壁面接触,对不平整的壁面具有高适应性、强驱动性、空间利用能力强、重心低稳定性好等优点。但履带式行走方式转向不灵活,而且履带会与壁面产生摩擦从而对壁面造成损坏。轮式行走方式利用电机驱动车轮,使用滚动的方式行走,是最常见的运动行走方式,具有效率高、重量轻、结构简单的优点,但缺点是只适合在平坦的路面行驶。
综合上述特点,采用轮式行走方式,利用两电机单独驱动左右车轮,并在前方设置一个万向轮,提高机器人的平衡性,具体结构如图2所示。
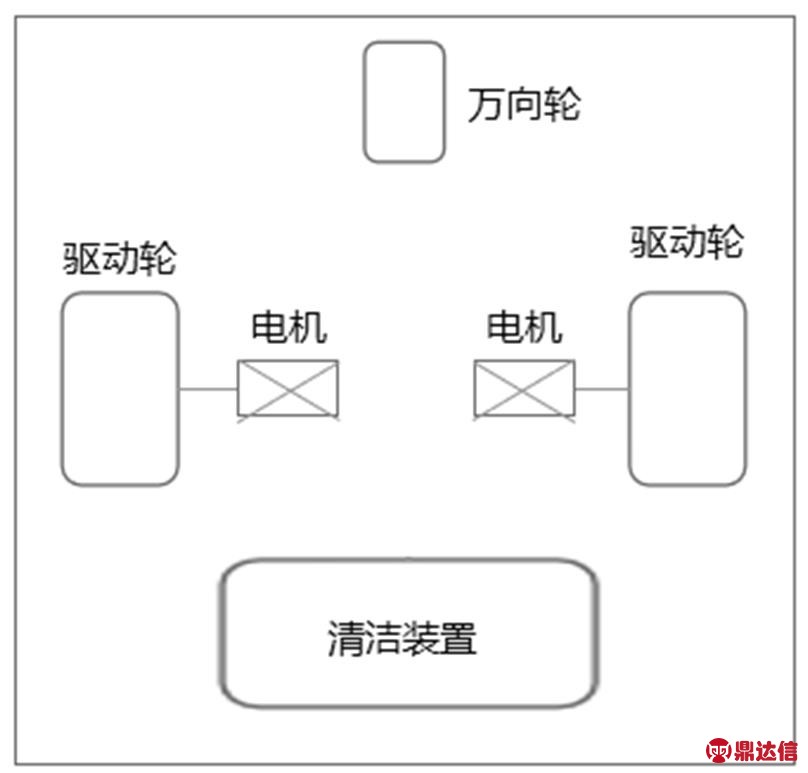
图2 结构示意图
4 清洗系统
在玻璃清洁机器人行走的过程中必须同时对玻璃壁纸进行清洗,才能实现整个玻璃清洁功能。清洗系统结构如图3所示,利用铝合金型材搭建整体框架,上刮板设置于铝型材框架的上方,下刮板设置于铝型材框架的下方,上下刮板设置有缓冲弹簧,当遇到障碍物时缓冲弹簧能够收缩,越过障碍物;滚刷通过带座轴承安装于铝型材框架内,与驱动装置连接;铝型材框架上下方设置有喷嘴,喷嘴将清洗液雾化后喷射至玻璃幕墙。
另一方面,通过清洗液循环装置将清洗液回收的方式提高清洗液的利用率。机器人的清洗液循环装置主要有滤芯、过滤水箱、污水收集箱、水泵等。
玻璃清洁机器人流程如下:①喷嘴内的液态清洁液经过喷嘴的雾化作用后喷至玻璃幕墙;②机器人带动电机驱动的滚刷将被清洗液溶解的污垢清洗掉;③机器人通过刮板刮清清洗液的方式实现幕墙壁面的清洁;④下刮板将污水拦截汇集并使汇集的污水被收集至污水收集箱;⑤利用水泵和进水管将污水输送到滤芯,过滤后再次利用[3]。
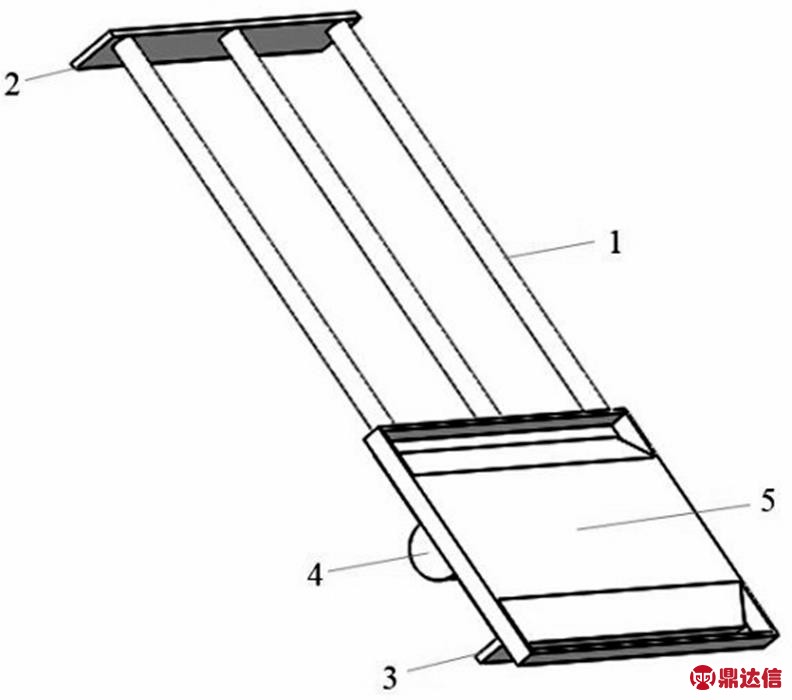
1—铝型材框架;2—上刮板;3—下刮板;4—滚筒;5—驱动装置。
图3 清洗系统结构示意图
5 结语
主要分析了机器人在玻璃清洁上的具体应用,并对吸附系统、行走系统、清洗系统进行详细分析,结合实际应用场景进行设计,可为玻璃幕墙清洁方面提供参考借鉴。
参考文献:
[1]贾明,刘克谦,宗光华.应运而生的玻璃幕墙【清洁机器人】——谈玻璃幕墙清洁自动化[J].建设科技,2002(5):84-86.
[2]王妹婷.壁面自动清洗机器人关键技术研究[D].上海:上海大学,2010.
[3]倪伟,吴英涛,赵晓贺.玻璃幕墙清洗机器人清洗系统的设计[J].南方农机,2017,48(16):40.


