
摘 要:针对非线性因素在飞轮储能单元之中产生的不利影响,文章基于双输入的飞轮储能系统提出了一种分步设计方法;通过Backstepping控制和无源性设计思想的有效结合,使系统转速和电流达到稳定输出。首先,基于双输入飞轮储能单元的充电模型,由Backstepping方法设计飞轮储能系统的 轴控制器;再者,利用协调无源性设计系统的
轴控制器;再者,利用协调无源性设计系统的 轴控制器,使得整个系统达到反馈无源,保证了系统的渐近稳定性。整个设计过程没有采用任何线性化处理,保证了整个控制律在非线性系统中的适用性,有效地提高了系统的稳定性能。通过仿真结果的对比可知,所提控制策略的有效性和正确性。
轴控制器,使得整个系统达到反馈无源,保证了系统的渐近稳定性。整个设计过程没有采用任何线性化处理,保证了整个控制律在非线性系统中的适用性,有效地提高了系统的稳定性能。通过仿真结果的对比可知,所提控制策略的有效性和正确性。
关键词:飞轮储能;反步控制;协调无源性;李雅普诺夫函数
随着新能源技术的快速发展和可再生能源应用日渐频繁;风能作为主要的新兴能源,其渗透率不断提升。但由于风电具有间歇性和随机性,对电力系统的稳定运行产生不利的影响。伴随着电力电子技术的发展,储能技术[1-3]是解决这一问题的有效途径,飞轮储能技术因其响应速度快、使用寿命长、维护成本低、环境污染小等优点,可用于改善电力系统电能质量的问题,被认为是最有应用前景的储能技术之一。
作为飞轮储能系统的驱动电机,永磁同步电机[4-5](permanent magnet synchronous motor,PMSM)具有结构简单、体积小、转矩惯量大等优良的性能被广泛应用到控制系统之中。由于其转子转速和定子电流的非线性耦合使电机本身具有很强的非线性;尤其当飞轮储能系统工作在充电模式下时,随着系统所处运行环境的不断变化和其非线性因素的作用,必然影响到飞轮储能系统的充电质量问题,进一步对电力系统的电能质量产生危害。
为了解决非线性因素在系统中产生的不利影响,提高系统的控制性能和鲁棒性能[6-8],国内外学者选择把目光集中在非线性因素的研究上,并取得了一些的研究成果[9-11]。文献[9]采用复合非线性反馈控制来解决系统中的非线性因素,得到系统的暂态和动态性能指标;文献[10]针对一类不确定非线性时滞系统,通过神经网络设计了一种新的自适应控制方案。文献[11]基于永磁同步电机设计了一种解耦的PI控制器,改善饱和条件下风电机组的暂态性能。
无源性理论是耗散性理论的一个特例[12],具有十分重要的物理及工程意义。耗散性系统理论的本质是存在一个非负的能量函数,即无源性理论中的存储函数,使得系统的能量损耗总小于系统的能量供给率,反映系统运行过程中能量的损耗特性。基于系统能量的输入输出,得到控制系统分析和设计的新框架。本文利用协调无源性的思想,对飞轮储能系统的双输入控制器进行分步设计,使得飞轮转速和电流达到良好的稳定效果。整个过程分为两部分进行,基于差分过后的飞轮储能系统,针对前两阶应用Backstepping方法,使得系统在q轴电压输入的情况下达到飞轮转速和q轴电流的渐近稳定;再者引进无源性控制器,通过设定d轴电压控制器,使得系统d轴电流达到稳定状态,从而确保整个飞轮储能系统处于有效的工作状态。最后,通过仿真验证了所提控制策略的有效性。
1 无源化设计基础
定义1:对于非线性系统
 (1)
(1)
若存在半正定的函数 ,使得
,使得
 (2)
(2)
对于任意的输入信号 都成立,则系统(1)为无源的。
都成立,则系统(1)为无源的。 为能量存储函数,式(2)为耗散不 等式。
为能量存储函数,式(2)为耗散不 等式。
定义2:对于无源系统(1)及能量存储函数,若存在正定函数 ,使得耗散不等式
,使得耗散不等式
 (3)
(3)
对于任意的 ,对于任意的输入信号
,对于任意的输入信号 都成立,则称系统为严格无源的。
都成立,则称系统为严格无源的。
如果在严格无源的系统中,存在着光滑、可微、正定的存储函数,则该系统是渐进稳定的,存储函数可作为Lyapunov函数。若不知道系统是否为严格无源,则对应为系统是Lyapunov稳定,但在一定的条件下,可以通过施加适当的反馈控制,使得存储函数成为闭环系统的Lyapunov函数,从而使系统达到渐近稳定[13]。
定理1:当双输入系统中输入-输出对( )的相对阶为1时,可以将系统(1)转化为[14]
)的相对阶为1时,可以将系统(1)转化为[14]
(4)
假设式(4)为零动态子系统,即式(4)在 情况下有
情况下有 单独控制是稳定的。这就需要寻找一个正定的函数,存在一个控制律
单独控制是稳定的。这就需要寻找一个正定的函数,存在一个控制律 使得系统的Lyapunov函数满足条件
使得系统的Lyapunov函数满足条件
 (5)
(5)
式中, 为
为 类函数。在时可将式(4)改写成
类函数。在时可将式(4)改写成
 (6)
(6)
式中 。所以系统(4)控制律设计为
。所以系统(4)控制律设计为
(7)
从而得到系统(4)的存储函数 满足,所以保证系统(4)是渐近稳定的。
满足,所以保证系统(4)是渐近稳定的。
2 系统模型
基于表面式的PMSM,由于其交直流电感相等,飞轮储能系统在d-q坐标下的充电数学模型[15]为
 (8)
(8)
式中, 为飞轮电机的
为飞轮电机的 轴电压;
轴电压; 为飞轮电机
为飞轮电机 轴电压;
轴电压; 为定子电阻;
为定子电阻; 为飞轮电机轴电流;
为飞轮电机轴电流; 为飞轮电机轴电流;
为飞轮电机轴电流; 是飞轮电机交直轴电感;
是飞轮电机交直轴电感; 为飞轮电机转子的磁链;
为飞轮电机转子的磁链; 为飞轮电机的极对数;为飞轮电机的转动惯量;
为飞轮电机的极对数;为飞轮电机的转动惯量; 为飞轮电机的电磁转矩;为飞轮电机的负载转矩。这里,、和
为飞轮电机的电磁转矩;为飞轮电机的负载转矩。这里,、和 是状态变量,和是输入变量。
是状态变量,和是输入变量。
进一步,将式(8)改写成增量的形式,则可以 得到
 (9)
(9)
式中,非线性交叉项 和
和 的差分结果分别为
的差分结果分别为
(10)
(11)
2.1 系统稳定工作点的确定和控制器的设计
对于恒定负载转矩的飞轮储能系统,当飞轮转速稳定于 时,可得飞轮储能系统的稳定的工作点[15]为
时,可得飞轮储能系统的稳定的工作点[15]为
(12)
对于非线性系统(1),设定、、 ,输入为
,输入为 、
、 ,输出为
,输出为 ,系统正常稳定运行的工作点为、
,系统正常稳定运行的工作点为、 、
、 ,判定可知
,判定可知 的相对阶为1,将上式(9)写成规范型,则
的相对阶为1,将上式(9)写成规范型,则
 (13)
(13)
 (14)
(14)
设计过程分为两步:首先,在无 控制情况下,应用Backstepping方法设计控制律;然后,基于协调无源性方法设计控制律。
控制情况下,应用Backstepping方法设计控制律;然后,基于协调无源性方法设计控制律。
2.1.1 利用Backstepping方法控制前两阶系统
基于协调无源性方法,在不考虑的作用下,先对系统的控制器进行设计。由式(12)可知系统为
(15)
根据Backstepping的设计方法,可以得到如下的控制器。设计过程如下述各式所示。
(1)设 ,则。取的虚控制为
,则。取的虚控制为
 (16)
(16)
(2)设 ,则对应的、分别为
,则对应的、分别为
 (17)
(17)
(18)
取Lyapunov函数为 ,可推得
,可推得
 (19)
(19)
进一步,令
 。则可以得到控制器为
。则可以得到控制器为
(20)
此时有
式中,为正常数;为函数。
即在 的情况下,的作用下可以使得飞轮储能系统的前两阶达到稳定。
的情况下,的作用下可以使得飞轮储能系统的前两阶达到稳定。
2.1.2 利用协调无源性完成系统的设计
在控制器的作用基础上,对控制器进行反馈无源性设计。设,定义存储函数为,根据无源性定理,由式(7)可得
(21)
进一步,可得
(22)
基于无源性的定义,可得
(23)
依据上述的讨论分析可以得到飞轮储能系统的反步和协调无源性控制律分别为式(20)和式(22)。进一步指出在一定的条件下,可达到可知系统所有的状态是渐进稳定的。
2.2 设计结果
基于以上的理论分析,综合无源控制器和Backstepping控制器的设计结果,归纳为以下定理:
定理2 基于系统(13)和(14),设计飞轮储能系统充电模式下的双输入控制器分别为式(22)和式(20),使得系统具有反馈无源性。进一步,当取反馈控制器 时,系统所有的状态达到渐进稳定。
时,系统所有的状态达到渐进稳定。
证明 已知系统(13),对系统(15)作坐标变换 如下
(24)
式中, 为式(16)所示。设定系统的Lyapunov函数为
为式(16)所示。设定系统的Lyapunov函数为 ,并对其求导可得
,并对其求导可得
 (25)
(25)
进一步,将控制律式(19)代入式(25),可得
 (26)
(26)
因此满足式(5)。取正定函数,设定控制律为式(22),这时有
(27)
所以式(13)和(14)是满足无源性条件的,取反馈控制器,选择合适的,可使得系统的能量存储函数满足并且,从而系统是渐近稳定的。关于Backstepping方法中的虚拟控制参数(),在参数选择时具有灵活性,经多次仿真选取合适的值,使系统的动态响应快速趋于稳定。
3 仿真验证
本节中,应用MATLAB程序对本文所提出的控制策略进行仿真验证。飞轮电机的基本参数为:定子电阻为2.875 W,磁极对数为4,转动惯量为0.008 kg·cm2,永磁磁通为0.175 Wb,交直轴电感为8.5 mH。
3.1 无源协调控制下的飞轮储能单元的输出曲线
对于期望的飞轮转速 rad/s时,飞轮储能单元在Backstepping策略(20)和无源控制策略(22)的作用下,其中对应产生的虚拟变量
rad/s时,飞轮储能单元在Backstepping策略(20)和无源控制策略(22)的作用下,其中对应产生的虚拟变量 、和分别取110、50和20,飞轮储能单元的、和的响应曲线如图1~图3所示。
、和分别取110、50和20,飞轮储能单元的、和的响应曲线如图1~图3所示。

图1 无源协调控制下的转速曲线
Fig.1 Curve of the speed of passive coordinated control
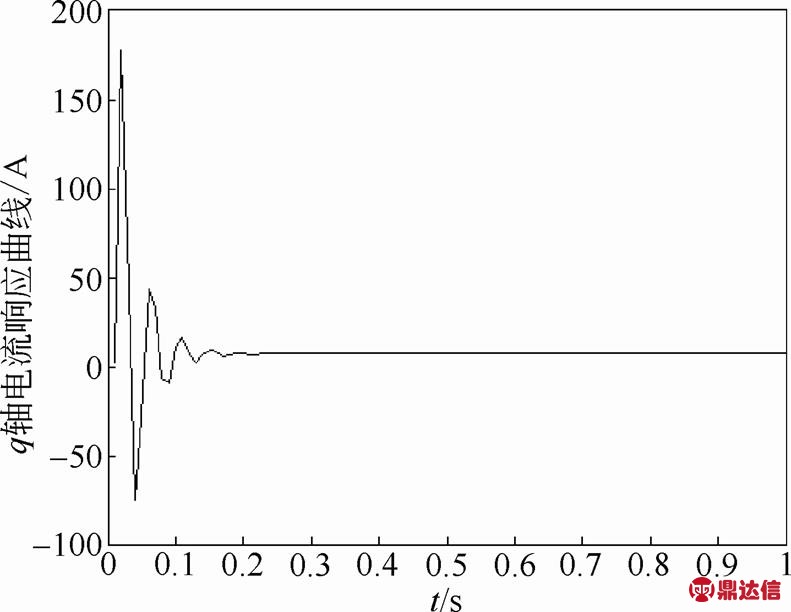
图2 无源协调控制下的q轴电流曲线
Fig.2 Curve of q axis current of passive coordinated control

图3 无源协调控制下的d轴电流曲线
Fig.3 Curve of d axis current of passive coordinated control
3.2 与Hamilton控制策略的性能比较
基于非线性系统来说,Hamilton能量函数的方法也是设计非线性系统控制器的有力工具,它从Hamilton能量函数的角度出发,避开了构造Lyapunov函数的困难。本文在参数选择相同的情况下,将协调控制策略和Hamilton控制方法[15]进行对比。其中,Hamilton控制方法下飞轮储能系统的响应曲线如图4~图6所示。
从仿真结果可知,对比两种控制策略下的输出曲线,可以得出:基于无源协调的控制策略下,飞轮储能系统可以在0.5 s之前快速达到稳定的工作点,相比Hamilton控制,系统的动态响应速度明显加快,缩短了系统达到稳定工作点的时间;对比两种控制策略下的飞轮转速输出曲线,无源协调控制策略下的转速输出曲线超调较小,稳态性能更好;而相对电流的输出曲线的超调来看,稳态性能提高幅度不明显。

图4 Hamilton控制下的转速曲线
Fig.4 Curve of the speed of Hamilton control

图5 Hamilton控制下的q轴电流曲线
Fig.5 Curve of q axis current of Hamilton control

图6 Hamilton控制下的d轴电流曲线
Fig.6 Curve of d axis current of Hamilton control
4 结 论
本文基于充电时飞轮储能单元的数学模型,应用协调无源性的特点,对双输入控制器分别设计,使整个系统达到电流和转速的机电双重稳定性。主要的创新点主要表现在。
(1)将协调无源性的方法应用到飞轮储能系统的充电模型之中,通过对双输入控制器的分布设计,得到整个系统的控制律。
(2)针对飞轮储能系统来说,针对定子电流和转速的非线性耦合提出了另一种解决思路,整个设计过程无任何线性化的处理过程,使所得到的控制律更加有效,实现系统的渐进稳定性能。
(3)将系统的设计分为两个部分,简化了设计的过程,确保系统可以达到理想的效果。最后通过仿真验证了所提控制策略的正确性和有效性。


