
摘要 电网中分布式电源的大量接入降低了系统的旋转惯性,虚拟同步发电机(VSG)技术作为解决这一问题的有效途径,其虚拟惯量的灵活可调具有显著优势,但其灵活调节时必须满足多种约束条件的限制。该文结合实际工况提出一种多约束限制下的灵活虚拟惯性(M-FVI)控制方法,该方法兼顾储能单元的极限工作状态、系统频率变化率、换流器容量以及系统单位时间功率可调量的影响。搭建含光储VSG单元的四端系统模型,并建立该系统的小信号模型,利用根轨迹法分析所提控制策略中关键参数对系统稳定性的影响规律,给出了控制参数的设计方法及原则。最后,通过硬件在环实验平台验证了所提多约束下虚拟惯性控制策略的有效性与实用性。
关键词:光储系统 灵活虚拟惯性 多约束 小信号模型 稳定性分析
0 引言
近年来,以光伏、风电为主的新能源发电在电网中的占比迅速增加,相较于传统以同步发电机为主的电力系统,此类分布式电源(Distributed Generator, DG)接入系统大多基于电力电子变换器接口,本身不存在有利于保持系统频率稳定的旋转惯性,其渗透率的不断增加会降低系统整体的转动惯量,当系统发生扰动时频率的波动会增大,严重影响到电力系统的动态响应及稳定性[1-2]。因此如何通过控制算法改善DG接入电网的友好性是一个亟待解决的问题。
针对分布式电源接入大电网或者微电网,早期采用的控制策略包括基于旋转坐标系解耦的电流型控制策略和下垂控制策略[3-4],能够模拟同步发电机一次调频特性并实现分布式电源的功率分配,但以上控制策略不具备旋转惯性和阻尼分量,使得电力系统整体的惯性减小,稳定性受到影响。因此虚拟同步发电机(Virtual Synchronous Generator, VSG)控制技术作为解决这一问题的有效途径受到广泛关注[5-7],该控制理念最早由德国的克劳斯塔尔工业大学Beck教授提出[5],为VSG控制算法的研究奠定了思想基础。文献[6]通过对VSG控制算法的下垂控制器进行修正并添加微分环节以减小并联运行逆变器空载运行电压和频率差值,并有效地补偿因计算带来的控制滞后。文献[7]提出的VSG控制算法可以在多能互补微网中提高电能质量。此外,很多文献均在不同方面对VSG控制算法进行改进,验证了其相比于传统控制算法的优势。可见,目前的研究基本构建了成熟的VSG控制算法,为之后的研究奠定了理论基础,但以上的研究局限于对同步发电机恒定转动惯量的模拟,其虚拟惯量的灵活可控性并没有得到充分利用。
为克服上述缺点,VSG系统的灵活可控性开始受到越来越多的关注[8-22],文献[8-9]分析了不同虚拟惯量变化下基于VSG控制算法的分布式电源对频率不同的动态支持情况,提出一种基于Bang-Bang控制的惯性系数调节方法。文献[11]在有功-频率控制环节模拟了同步发电机的转子运动特性和一次调频特性,提出以系统频率变化率为约束条件的灵活虚拟同步机(FlexibleVirtual Synchronous Generator, FVSG)控制策略。文献[16]提出采用最佳阻尼比来抑制VSG系统功率和频率的振荡的自适应控制策略,系统响应时间和超调量等动态指标得到优化,动态性能得到提高。文献[18]提出VSG频率自恢复控制策略,有效抑制频率越限,使频率较快恢复,且能在不依赖复杂通信系统的情况下有效提高独立微网的频率稳定性。文献[19]提出了一种基于旋转同步坐标系的微电网分层控制策略,实现频率快速跟踪,改善波形质量。以上研究大多将虚拟惯量同系统频率变化联系起来,利用VSG中虚拟惯量的灵活可调性来改善系统性能。但已有的研究忽略了许多约束虚拟惯性灵活调节的重要条件,如储能系统的荷电状态(State of Charge, SOC)、瞬间释放或吸收功率能力的大小以及换流器的容量限制等,如不对其进行系统研究,这些因素将会直接阻碍虚拟惯性系统未来的实用化。
综上,为了增强光储灵活惯性控制方法的实用性和工程应用价值,本文提出一种基于蓄电池充放电极限、频率变化率、换流器容量以及系统单位时间功率可调量影响的多约束下灵活虚拟惯性(Multi-constrained FlexibleVirtual Inertia, M-FVI)控制策略。搭建含光储VSG单元的四端系统模型,建立小信号模型,利用根轨迹法分析所提控制策略中关键参数对系统稳定性的影响规律,应用层次分析法以及三维曲面分析给出了各个控制参数的设计方法及原则,并通过硬件在环实验平台对所提控制策略进行了验证,以提高VSG控制技术的工程应用价值。
1 系统拓扑与VSG控制策略
1.1 拓扑结构
本文以四端交流系统中的光储VSG单元作为研究对象,整体拓扑结构如图1所示,其中柴油发电机G1工作在恒功率模式,柴油发电机G2负责系统频率的稳定,负载PL为恒定有功负荷。光储端各自经DC-DC换流器汇集后再由DC-AC换流器并入系统,其在整个系统中的穿透功率水平较高,以测试所提控制策略的作用效果。
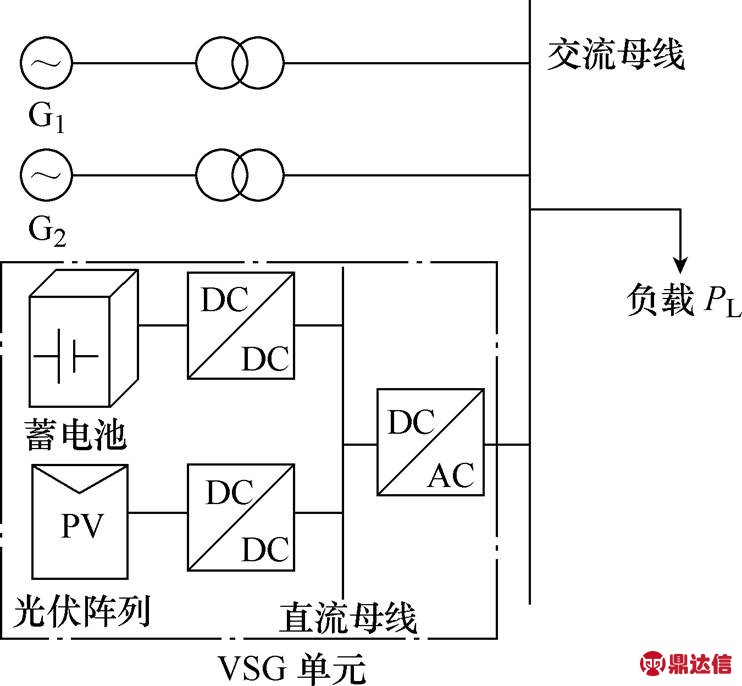
图1 含VSG单元的四端系统拓扑结构
Fig.1 Four-terminal network topology with VSG unit
1.2 VSG控制策略
针对VSG控制方法,本课题组前期提出了基于频率变化率的FVSG控制策略[10-11,22],本文重点对其中的有功-频率控制环进行改进,VSG单元的有功-频率控制方程为
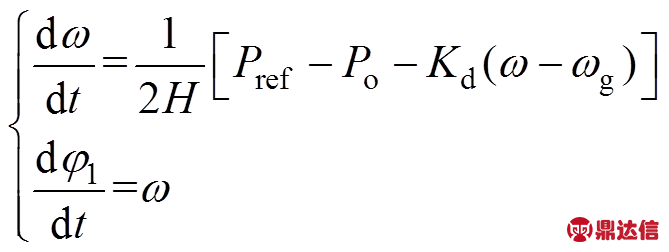 (1)
(1)
式中,H为虚拟惯量;w、wg分别为逆变电源及公共母线的角频率;Kd为阻尼系数;Pref为有功功率设定值;Po为逆变电源输出的有功功率;j1为相位。根据式(1)可以得到有功-频率的控制框图如图2所示。
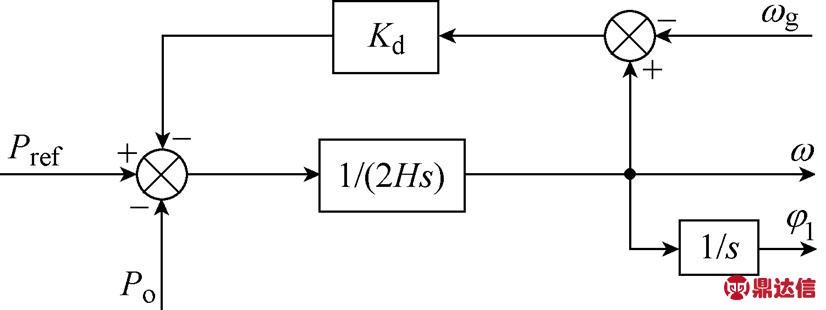
图2 有功-频率控制框图
Fig.2 Active power-frequency control block diagram
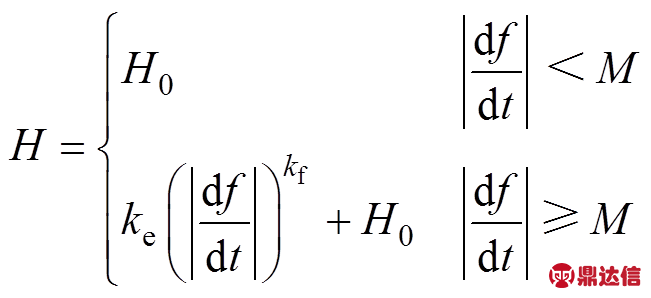
在式(1)的基础上,为了能够充分发挥虚拟惯性灵活可调性,FVSG控制中基于指数函数的虚拟惯量H的表达式[11]为
 (2)
(2)
式中,|df/dt|为频率变化率;H0为稳态运行时的惯性时间常数;M为频率变化率的临界阈值;ke、kf为惯性调整系数。当|df/dt|<M时,虚拟惯量为一定值,避免H的频繁切换,当|df/dt|≥M时,H通过指数函数调节变大,从而减小系统频率变化量,改善系统的频率稳定性。相比于固定惯量的VSG控制方法,FVSG控制可以根据系统频率变化率灵活地调节惯量的大小。
2 多约束下的灵活虚拟惯性控制策略
上述FVSG控制方法能够随系统频率变化率而自适应地调节虚拟惯量的大小,从而更好地支持系统频率的稳定。但当系统频率变化率较高时,根据式(2)应增加虚拟惯量值,同时会增加VSG单元的交换功率,但如果此时蓄电池或换流器已处于极限工况,就会对蓄电池或换流器造成一定的损坏。针对这种工程实际应用情况,结合多种影响因素,充分考虑多种约束条件,本文提出M-FVI控制方法,以更好地满足实际工程应用。
本文主要考虑蓄电池充放电极限、频率变化率、换流器容量以及系统单位时间功率可调量四个主要影响因素。在四个约束条件中,由于蓄电池在VSG单元能量双向流动方面具有不可或缺的作用,其安全稳定至关重要,故将蓄电池充放电极限作为最主要的约束条件。以蓄电池荷电状态来表征蓄电池的工作状态,据此划分系统工作状态为
 (3)
(3)
式中,SOC为蓄电池瞬时荷电状态;a、b分别为蓄电池放电极限值和充电极限值。
M-FVI控制策略利用当前蓄电池的SOC,判断其工作状态,当蓄电池处于充电或者放电极限状况时,根据蓄电池SOC和虚拟惯量H之间的函数关系计算当前SOC值所对应的H;当蓄电池处于正常工作状态下,则主要考虑其他三个约束条件的作用来计算虚拟惯量H。
2.1 蓄电池SOC影响下的虚拟惯量控制策略
根据式(1)可以得到有功功率、角频率以及虚拟惯量之间的关系,稳态运行时,可将其简化为
 (4)
(4)
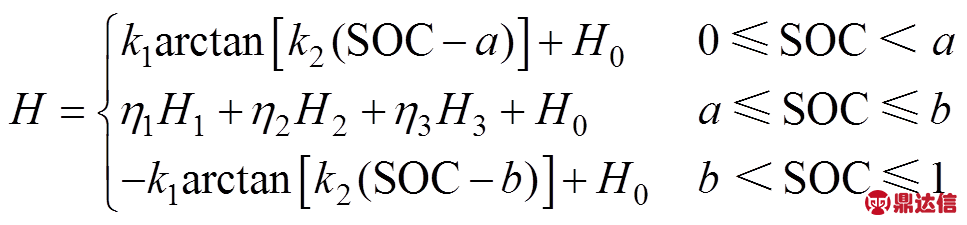
式中,Pin为输入逆变电源的有功功率;DP为有功变化量。当蓄电池在充放电极限状态时,希望蓄电池出力尽量小,即DP尽量小,近似认为短时间内频率变化量Dw 不变,根据式(4),H应尽量小,以实现虚拟惯量的自适应控制。由此提出SOC影响下H的表达式为
 (5)
(5)
式中,k1、k2为虚拟惯量调整系数。
从式(5)可知,蓄电池处于极限工作状态时,所提控制策略由于反正切函数的作用,使虚拟惯量H减小,有功变化量DP随之减小,进而降低蓄电池出力,并且蓄电池过充过放程度越深,H减小的程度越大,控制效果就越显著。相比于固定惯量的VSG控制策略,所提控制可以达到自适应调节H进而优化蓄电池运行状态的目的。需要说明的是,在SOC极大或极小时,蓄电池无法实现能量的双向流动,不再具备实现VSG控制的条件,本文对此不作讨论。
2.2 非SOC影响下的虚拟惯量控制策略
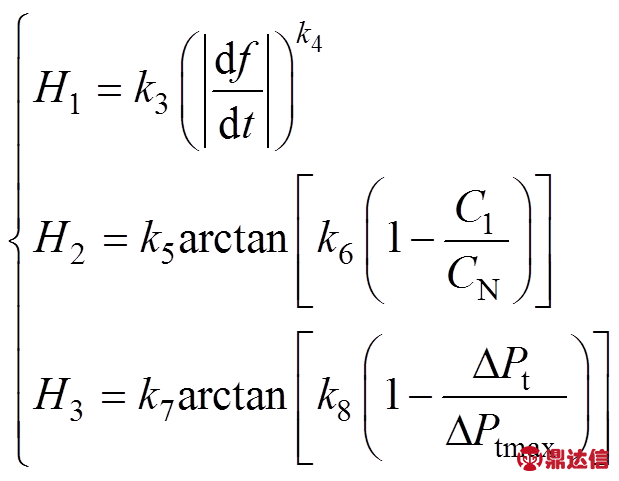
当蓄电池处于正常工作状态时,则不考虑其SOC对虚拟惯量H的影响,而充分考虑系统频率变化率、换流器容量以及系统单位时间功率可调量的影响。换流器瞬时交换功率越大,越接近换流器额定容量时,H应越小,功率变化量就越小,来减小换流器负担;VSG系统单位时间内有功变化量越大,H应越小,来减小功率变化量,避免功率变化超过系统能够承受的极限。据此,提出蓄电池正常工作状态时,虚拟惯量H的表达式为
 (6)
(6)
其中
 (7)
(7)
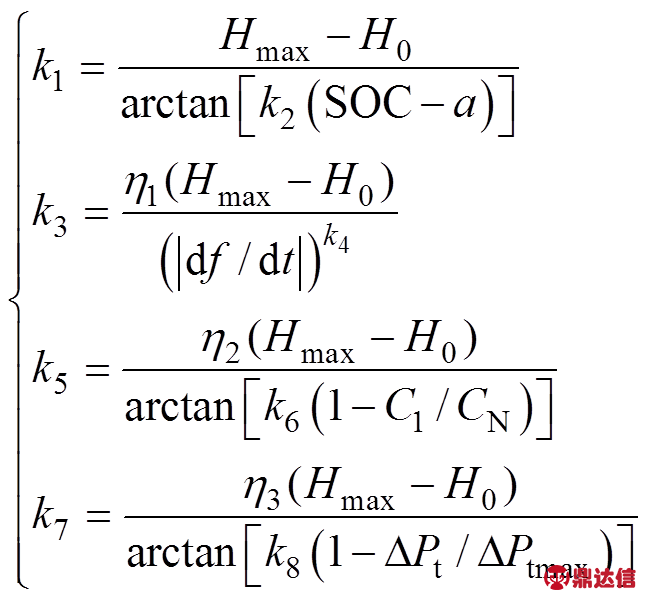
式中,H1为以频率变化率为约束的虚拟惯量;H2为以换流器容量为约束的虚拟惯量;H3为以系统单位时间功率可调量为约束的虚拟惯量;C1为换流器瞬时交换功率;CN为换流器额定容量;DPt为单位时间功率变化量;DPtmax为单位时间功率可调量;DPt、DPtmax均为绝对值;k3~k8为各影响因素对应的虚拟惯量调整系数;h1、h2、h3为影响因子权重系数,当其中某一影响因素对系统影响程度大时,则该影响因素所对应的权重系数相对较大,但始终保持三者权重系数之和为1。
据式(6)可得,当|df/dt|增大时,H相应增大,C1增大时,H相应减小,DPt增大时,H相应减小,符合实际工况的要求。非SOC影响下的虚拟惯量控制策略基于反正切函数、指数函数以及各调节参数的作用来提高系统的运行性能。在换流器极限运行或系统单位时间交换功率达到极限的工况下,可以主动调节H保证系统的安全稳定运行。同时,在换流器安全运行以及系统单位时间交换功率在可调范围之内的工况下,可以实现所提控制下的频率稳定性优于FVSG控制,从而改善系统运行状态。
通过上述分析,得到多种约束条件共同影响下的灵活虚拟惯量控制策略可表示为
 (8)
(8)
据此,改进后的多约束有功频率控制结构如图3所示,给出了该控制策略的核心部分,即多约束虚拟惯量的控制部分,根据各影响因素对虚拟惯量的修正,使VSG系统适应各种工作情况,提高了VSG系统的稳定性与实用性。图4给出了M-FVI控制策略计算H的流程。其中,参数h1~h3、k1~k8将通过下文根轨迹分析、三维曲面图及层次分析法进行分析与设计。
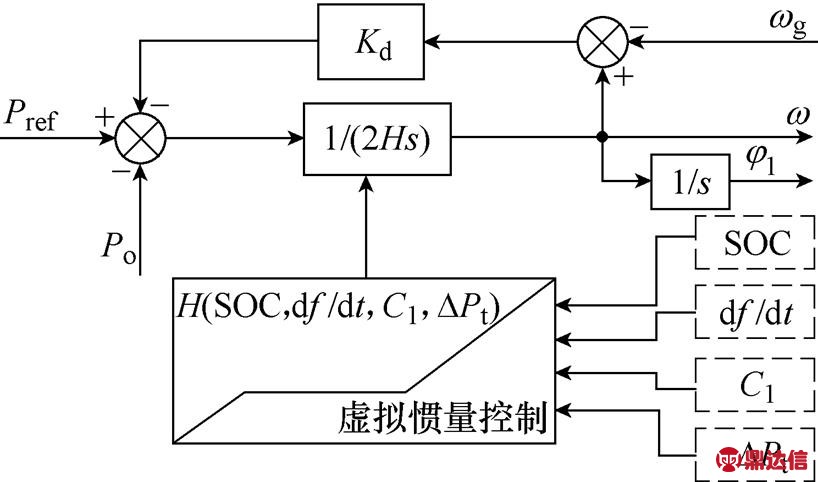
图3 多约束有功-频率控制框图
Fig.3 Multi-constrained active power-frequency control block diagram
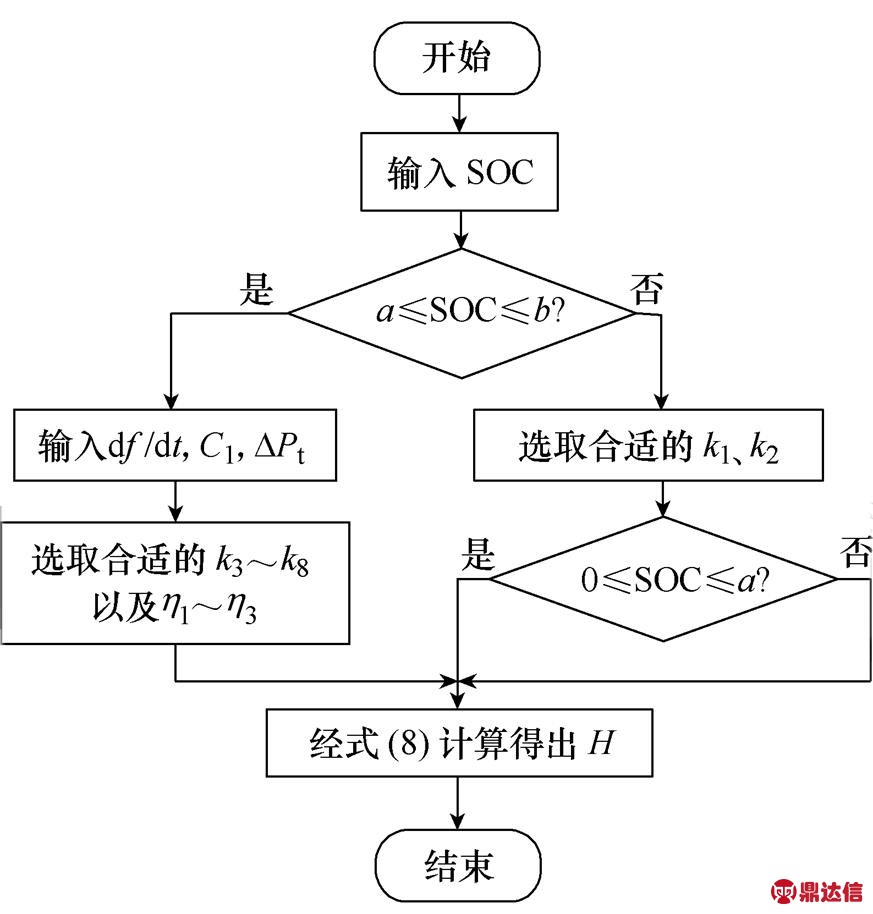
图4 M-FVI控制策略流程
Fig.4 Flow chart of M-FVI control strategy
3 系统小信号模型
为分析所提M-FVI控制策略在小扰动时系统的稳定性,据图1所示四端系统构建其小信号模型。
3.1 光储VSG单元小信号模型
光储系统经DC-DC换流器输出稳定直流电压,然后经DC-AC逆变器并入系统,其中控制部分包括功率环、电压环和电流环,如图5a所示。其中,L、C分别为滤波电感和电容;X1、R1分别为线路等效电抗和电阻,且X1=wrefL1;i1、u1分别为滤波器前级电感电流和前级端口电压;uo、io分别为逆变器输出电压和电流;Uo为逆变器输出电压幅值;e为交流母线电压,为一定值;E为交流母线电压幅值,设定交流母线电压相位为0°; 为功率环输出的参考电压,是电压环的输入,
为功率环输出的参考电压,是电压环的输入, 为电压环输出的参考电流,是电流环的输入。PWM近似等效为传递函数为1的环节。电压电流环采用PI控制,其控制结构如图5b所示。其中,Kpv、Kpc分别是电压环、电流环比例增益;Kiv、Kic是电压环、电流环的积分增益;x1、x2为状态变量。
为电压环输出的参考电流,是电流环的输入。PWM近似等效为传递函数为1的环节。电压电流环采用PI控制,其控制结构如图5b所示。其中,Kpv、Kpc分别是电压环、电流环比例增益;Kiv、Kic是电压环、电流环的积分增益;x1、x2为状态变量。
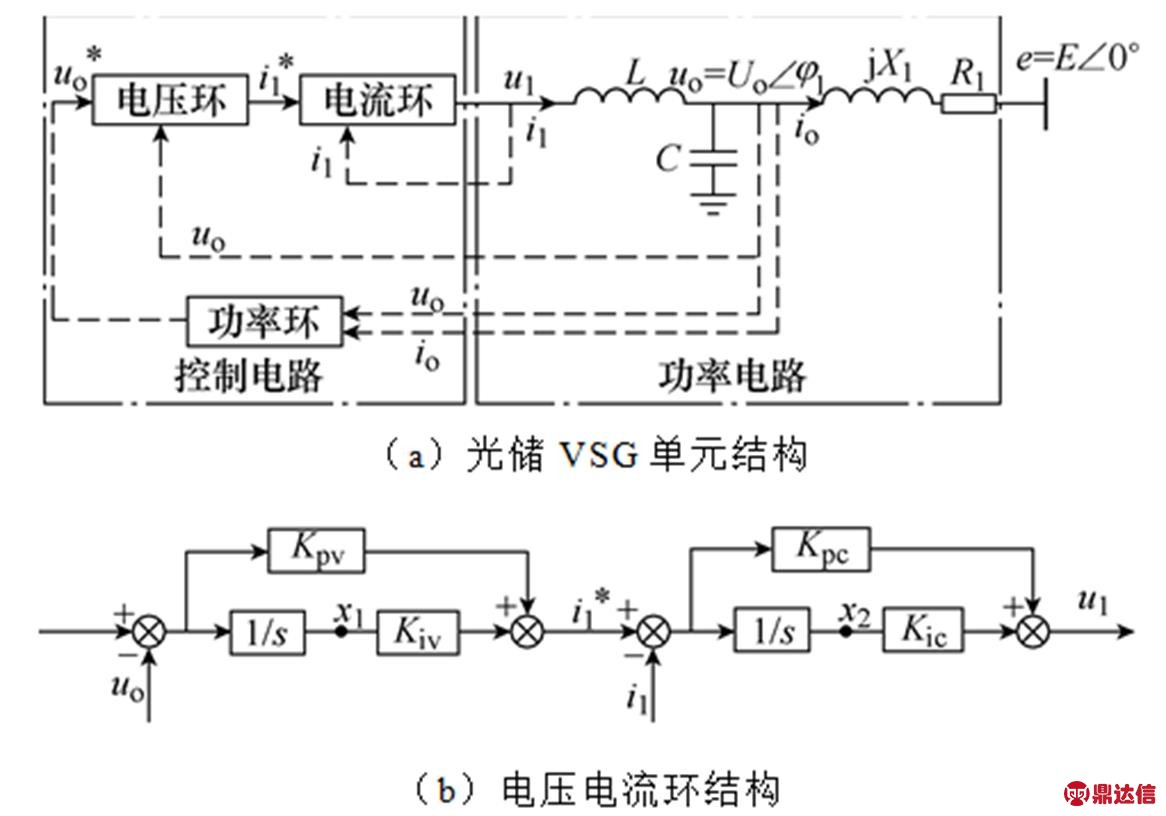
图5 光储VSG单元整体及部分结构
Fig.5 Overall and partial structure for photovoltaic energy storage VSG unit
按照图5推导各环节的状态方程并整合为
 (9)
(9)
其中
根据等效电路计算得到逆变器输出有功功率Po为
 (10)
(10)
将式(9)线性化并整理得到蓄电池VSG单元的小信号模型为
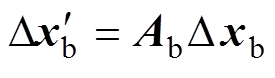 (11)
(11)
系数矩阵Ab详见式(A2)。
3.2 发电机G1小信号模型
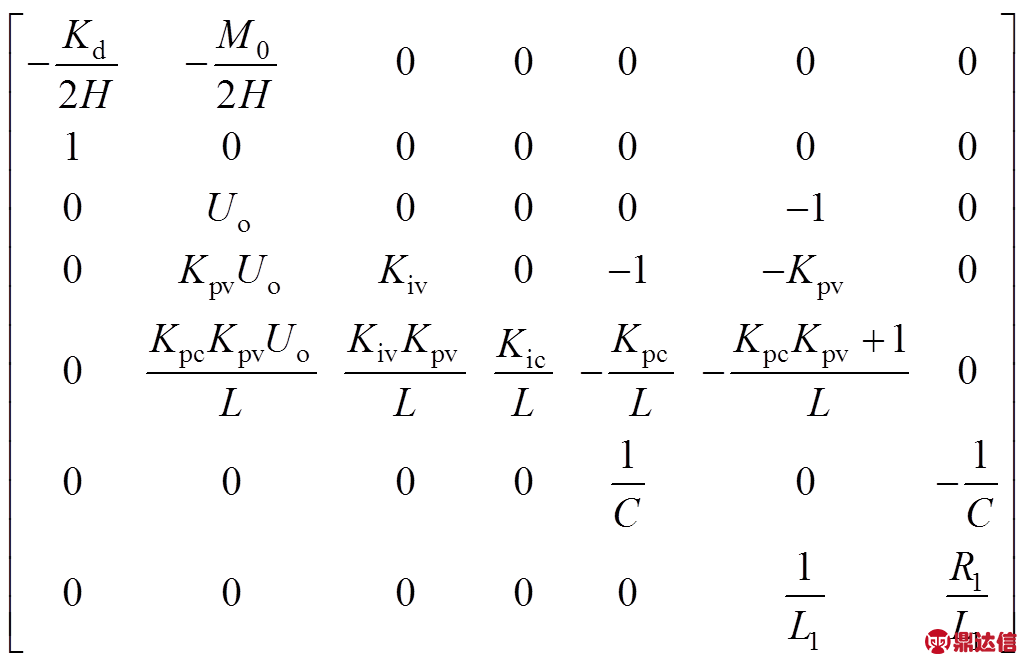
系统中恒功率输出的发电机G1由原动机驱动,忽略相关损耗,原动机发出的机械功率Pm作为发电机G1的输出功率PG1,发电机G1的模型由原动机模型代替,其传递函数[23]为
 (12)
(12)
式中,u为燃油喷射系统的输入信号,在此为定值;kpm为燃油喷射系统增益和原动机增益之和;tpm为系统时间常数;td为原动机停滞时间。式(12)转换成模拟结构如图6所示,其中,x3、x4为状态变量。

图6 发电机G1模拟结构
Fig.6 Generator G1 simulation structure
据此得到发电机G1的状态方程为
 (13)
(13)
对式(13)线性化得到发电机G1的小信号模型为
 (14)
(14)
式中, ;矩阵AG1详见式(A3)。
;矩阵AG1详见式(A3)。
3.3 发电机G2小信号模型
系统中用于调频的发电机G2由原动机、调速器以及PI控制模块组成,发电机G2的结构如图7所示。其中,P1、PG1、PG2分别为光储VSG单元、发电机G1、G2输入到交流母线的有功功率。Kp为PI控制器比例增益,Ki为积分增益,wr为发电机G2角频率,wref为角频率参考值,JG2为发电机G2的转动惯量,kL为损耗系数。其原动机模型与发电机G1相同,但由于u为变量,原动机功率Pm与发电机G2的输出功率PG2不相等,其他参数含义相同。
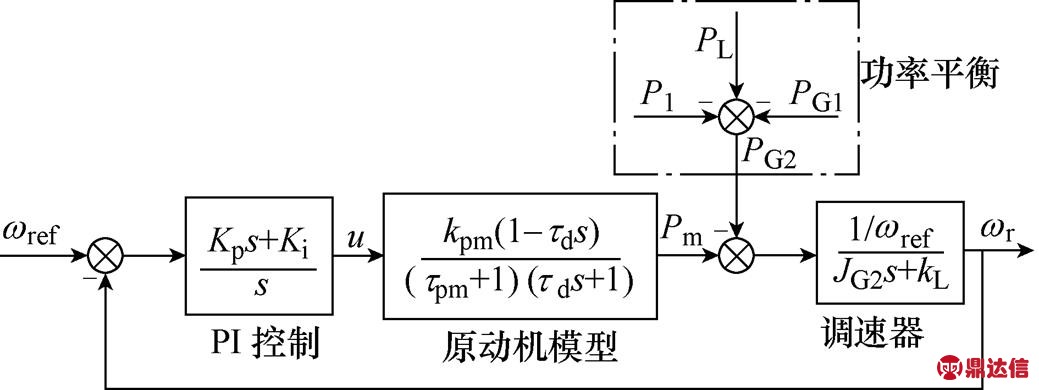
图7 发电机G2结构
Fig.7 Generator G2 structure
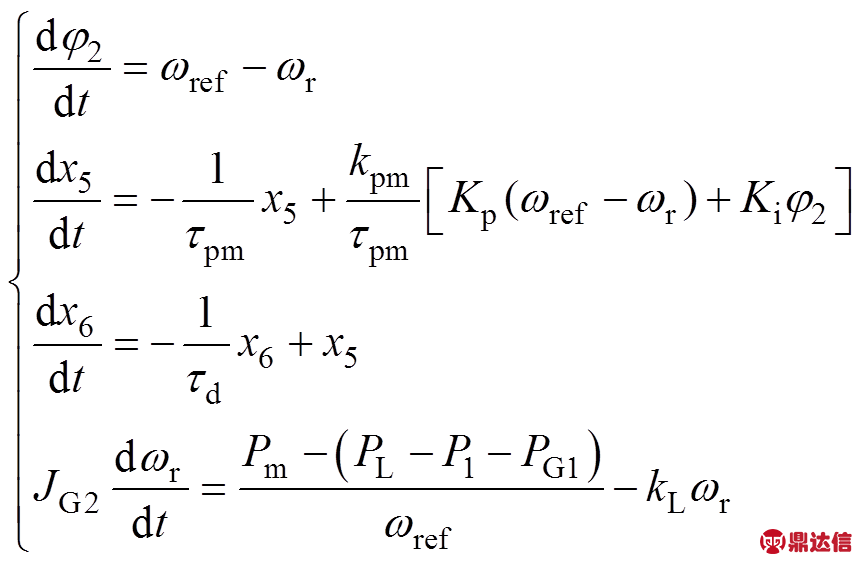
参照式(13)得到发电机G2的状态方程为
(15)
式中,j2为发电机G2与交流母线电压相位差;x5、x6为状态变量,光储VSG单元输入交流母线的有功功率P1可根据图5a线路结构计算得出,PG1、Pm分别可以通过图6和图7得到,表示为
 (16)
(16)
将式(15)和式(16)联立并线性化得到发电机G2的小信号模型为
 (17)
(17)
式中, ,系数矩阵AG2、B1、B2详见式(A4)~式(A6)。
,系数矩阵AG2、B1、B2详见式(A4)~式(A6)。
3.4 四端系统小信号模型
根据上述分析,联立式(11)、式(14)和式(17)得到四端系统的小信号模型为
(18)
式中, 包含13个状态变量,系数矩阵Asys详见式(A1)。
包含13个状态变量,系数矩阵Asys详见式(A1)。
4 稳定性分析及参数设计
4.1 系统稳定性分析
据式(18)可知,系统共有13个特征根,其根轨迹如图8所示。需要说明的是,图中只显示主导特征根的变化情况,其他特征根变化较小,可忽略,图中箭头所指为特征根变化趋势。
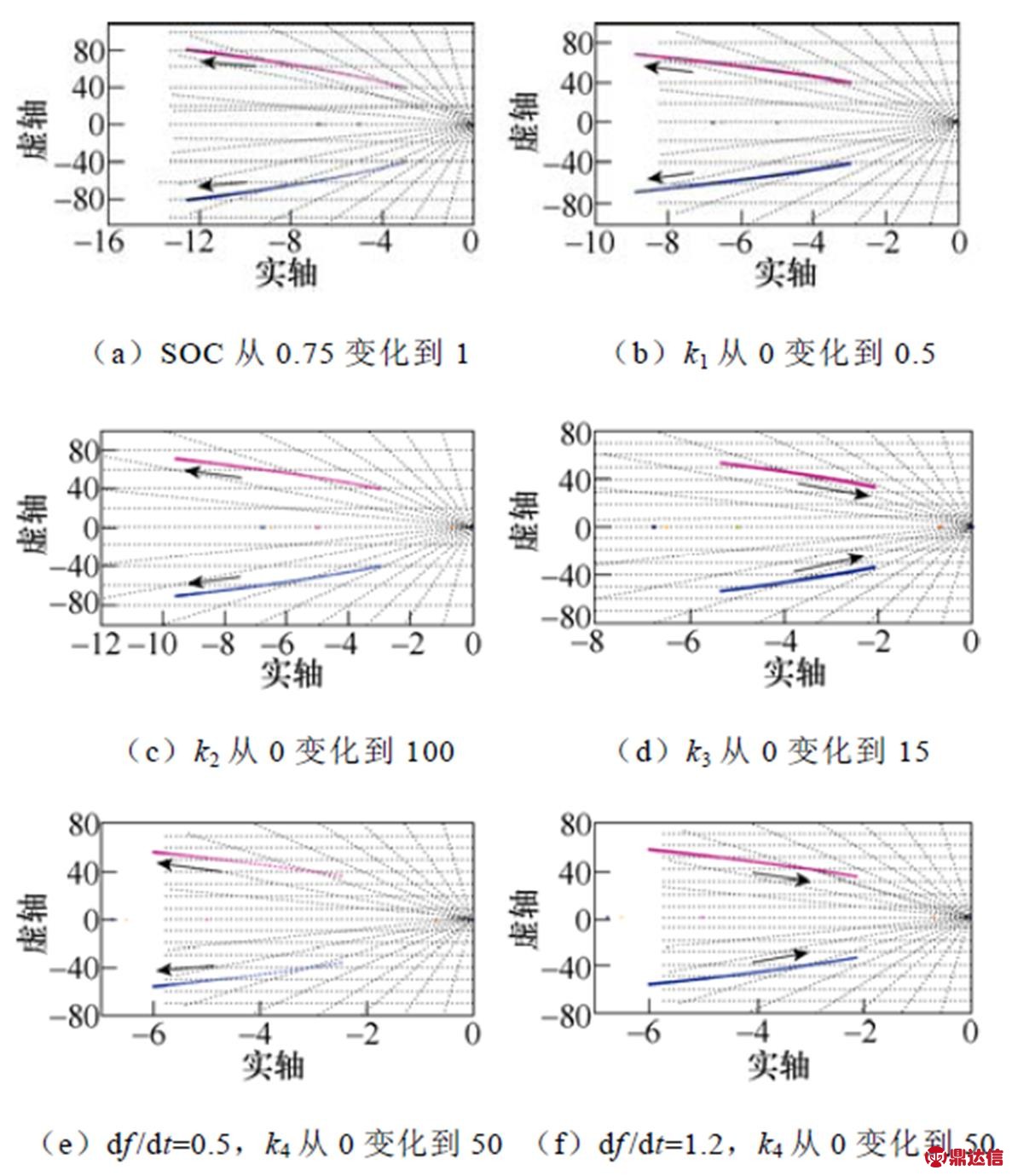
图8 关键参数变化时的系统特征根轨迹
Fig.8 Root locus of the system with variation of key parameters
图8a~图8f分别描述式(8)所表达的M-FVI控制策略中部分主要参数的变化对系统根轨迹的影响。图8a是SOC从0.75变化到1(充电极限)的根轨迹,可以看出,随着SOC的增加,也即蓄电池过充的程度加深时,H减小,主导特征根s1、s2的根轨迹向远离虚轴方向变化,系统稳定性提高。说明所提控制策略在蓄电池极限工作状态下能够提高系统稳定性,尤其是蓄电池工作于深度过充或过放工况时,控制效果更佳显著。图8b、图8c分别表示k1从0变化到0.5、k2从0变化到100的特征根轨迹,由图可知,k1或者k2越大,主导特征根s1、s2的根轨迹向远离虚轴方向变化,系统稳定性提高,所以k1或k2的选择应在满足约束条件下尽量大。图8d表示k3从0变化到15的根轨迹,可以明显看出,随着k3增大,系统稳定性降低。图8e表示df/dt= 0.5<1时k4从0变化到50的特征根轨迹,随着k4的增大系统稳定性增加。图8f表示df/dt=1.2>1时k4从0变化到50的特征根轨迹,随着k4的增大,系统稳定性降低。
由于基于换流器容量以及系统单位时间功率可调量的函数H2、H3与基于蓄电池SOC的函数关系都属于反正切函数,但取值的正负性相反,因此其调节参数k5~k8与k1、k2对系统稳定性影响类似,但根轨迹变化趋势相反。通过根轨迹分析可得出k5~k8任一参数的增大都会造成主导特征根s1、s2的根轨迹向趋近虚轴方向移动,造成系统稳定性降低,所以应在满足其他约束的同时考虑选择较小的参数k5~k8。对于放电极限的工况,分析结果相同,限于篇幅不再详述。
4.2 稳定运行边界
根据式(4)中频率变化与虚拟惯量的关系,理论上,虚拟惯量设置的越大,系统频率在暂态情况下的变化幅度越小,对改善系统暂态响应越有利。但由于受到换流器容量及系统单位时间功率可调量的限制,虚拟惯量过大,系统无法提供所需的功率,同时,过大的虚拟惯量会造成系统的动态响应变慢,超调量增大,并会产生一定的振荡。因此有必要设定虚拟惯量的最大值。根据式(4)得到综合考虑各影响因素下系统可设定的最大虚拟惯量值Hmax为
 (19)
(19)
式中,Dw、Df分别为角频率与频率的偏差值。虚拟惯量最小满足为正惯量即可,所以系统实际稳定运行的约束条件可以表示为
 (20)
(20)
同时,在M-FVI控制策略中为便于判断换流器运行状态设定换流器阈值容量,小于换流器额定容量。当换流器瞬时交换功率C1在其容量阈值范围内时,主要考虑提高系统频率稳定性,所以应防止由于M-FVI控制中权重的分配使计算所得Hcin小于FVSG控制所得到虚拟惯量HFSVG;当C1超过阈值容量Cth时,主要考虑换流器安全运行,应保证M-FVI控制所得虚拟惯量Hcout小于FVSG控制所得虚拟惯量HFSVG,才能够降低换流器容量的影响。
同样设定系统单位时间功率可调量的阈值,当DPt在阈值范围内时,应保证M-FVI控制所得虚拟惯量Hpin大于FVSG控制所得虚拟惯量HFSVG以提高系统频率稳定性,当DPt超过阈值时,应保证M-FVI控制所得虚拟惯量Hpout小于FVSG控制所得虚拟惯量HFSVG以抑制系统单位时间功率变化量的增大,从而保证系统的安全运行,所以得到
 (21)
(21)
M-FVI控制策略通过参数设计所得到的虚拟惯量应满足式(20)和式(21)的约束条件,保证系统的稳定运行。
4.3 参数h1~h3的设定
在h1~h3的选取上,本文采用层次分析法,即分别对系统频率变化率、换流器容量以及单位时间功率可调量的影响程度进行层次分析,得到各个影响因子对系统影响程度的大小,来确定各影响因子的权重系数。
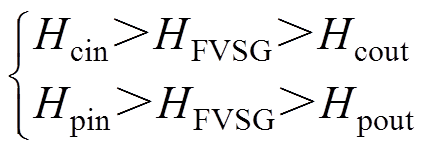
为确定各个约束的影响权重,将所有约束的影响程度进行两两对比,并按其重要性程度评定等级,构造成对比较矩阵。层次分析法相比于客观统一比较可提高准确度。设定aij为因素i与因素j重要性比较结果,表1给出了9个重要性等级及其赋值。
表1 影响因子重要性等级及其幅值
Tab.1 Impact factor importance level and its magnitude
根据df/dt、C1、DP的影响程度对比得到成对比较矩阵A为
 (22)
(22)
式中,aii=1,aij=1/aji(i、j=1, 2, 3)。
将矩阵A进行列向量归一化得到
 (23)
(23)
其中
将矩阵B按行求和并进行归一化得到
 (24)
(24)
其中
得到最大特征根
进行检验:一致性检验指标CI=(lmax-n)/(n-1),本系统中n=3;随机一致性检验指标RI,通过平均随机一致性检验指标标准值设定表可知,此处A为三阶矩阵,对应的RI=0.58;检验系数CR=CI/RI,若得到的CR<0.1,则认为该成对比较矩阵A通过一致性检验,否则重新构造矩阵A,最终得到满足检验指标的各权重系数。
最终得到的矩阵N所包含的三个元素h1~h3分别代表文中三个约束条件对系统的影响程度。当其中某一权重系数大于其他权重时,代表该系数所对应的约束条件对系统的影响相对显著,则虚拟惯量主要根据该约束条件进行调整。譬如,当h2明显大于h1和h3时,说明换流器瞬时交换功率接近换流器最大容量,对系统的影响相对显著,此时虚拟惯量会根据换流器瞬时交换功率的增加而减小,造成系统整体的旋转惯量减小,降低VSG单元的交换功率,进而降低换流器的瞬时交换功率,保证换流器的安全稳定运行。
因此,根据权重系数的差异,M-FVI控制策略可以自主地减弱对系统具有突出影响的约束条件的影响程度,保证系统安全稳定运行,提高VSG控制技术的实际工程应用价值。
4.4 参数k1~k8的设计
设定H0为0,根据H的控制策略将Hmax依据h1~h3各影响因素权重系数动态分配为h1Hmax、h2Hmax、h3Hmax,它们分别作为系统频率变化率、换流器容量以及单位时间功率可调量影响下的最大虚拟惯量,得到
 (25)
(25)
由式(25)可知,该控制策略中的影响因素可以归类为基于两类函数的控制,分别是指数函数和反正切函数。下文,以频率变化率所在的指数函数H1以及换流器容量所在的反正切函数H2为例进行三维曲面分析来确定参数的设计原则。
图9所示为不同k4对应虚拟惯量随k3以及频率变化率变化的三维曲面。可以看出,随着k4的增加,曲面由“凸面”变为“凹面”,倾斜度越高,说明参数k4与虚拟惯量H的交互作用越显著,即k4越大,随着频率变化率的增加,虚拟惯量增长越迅速。当频率变化较小时,应选择较小的k4,能够迅速激活控制策略,当频率变化较大时,应选择较大的k4能够迅速抑制扰动的影响。所以在设计参数时应该优先考虑k4,再根据系统的响应特性以及稳定运行边界设计k3。
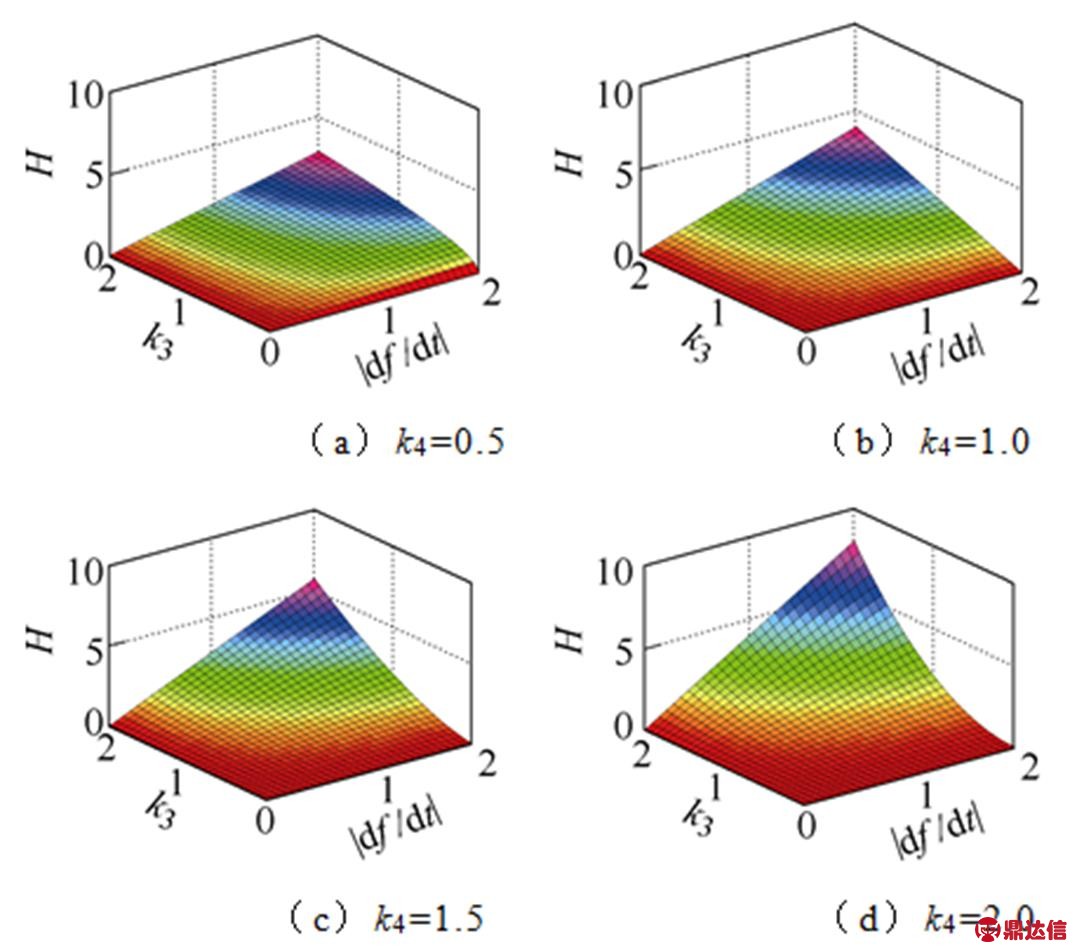
图9 不同k4下k3及|df /dt|对H交互影响曲面图
Fig.9 Interaction of k3and |df /dt| on H under different k4
图10所示为不同k6对应虚拟惯量随k5以及换流器容量变化的三维曲面。可以看出,随着k6的增加,倾斜度越高,表明参数k6与虚拟惯量H的交互作用越显著,也即是k6越大,在换流器容量较大时可以使H迅速下降,响应速度加快。换流器安全运行时,H主要受参数k5的影响,换流器容量接近额定容量时,H下降时的响应速度主要受k6影响,所以应该在满足稳定运行边界前提下优先按照图10d的变化趋势设计参数k5、k6。
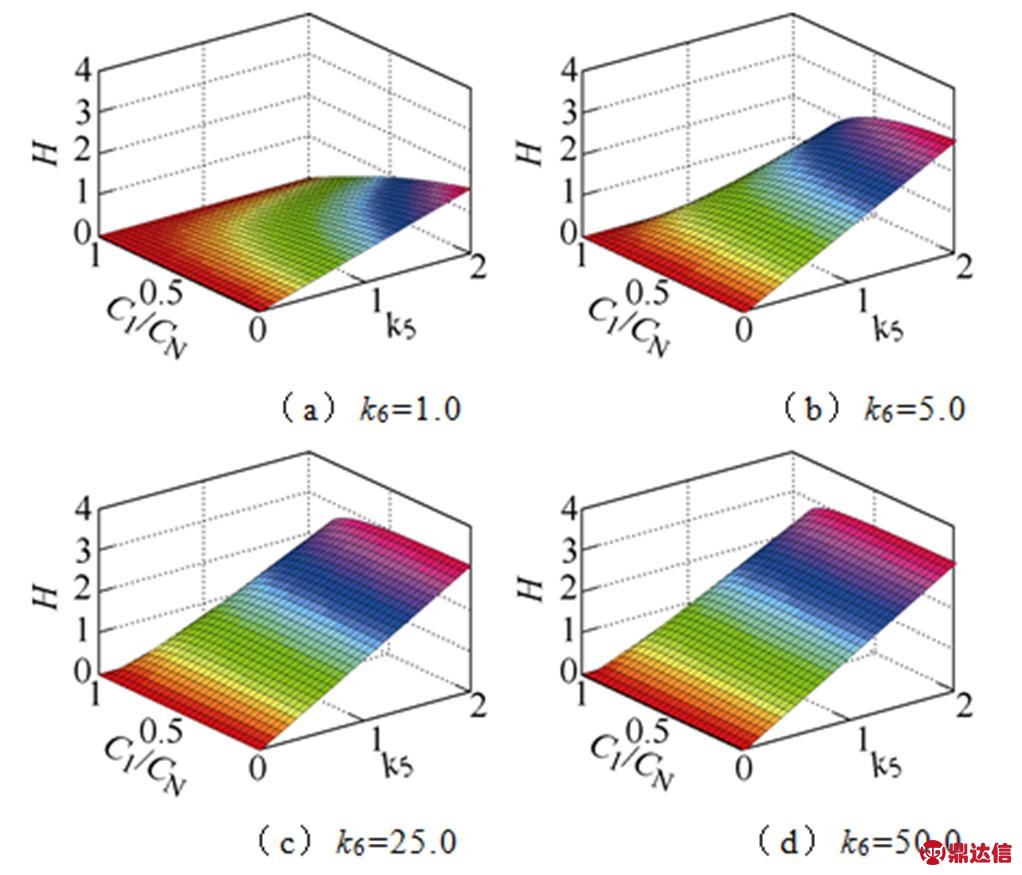
图10 不同k6下k5及C1/CN对H交互影响曲面图
Fig.10 Interaction of k5and C1/CN on H under different k6
基于蓄电池SOC、单位时间功率可调量的函数都属于反正切函数,其参数调整对H的作用效果一致,主要区别在于蓄电池SOC影响下的H函数取负值,但并不会影响各参数对H的作用效果,限于篇幅不再详述。
综上分析,可得如下结论:
(1)k1、k3、k5、k7的设定主要由各个影响因素的大小以及影响权重系数来确定。
(2)k2、k4、k6、k8的设定主要由虚拟惯量H的变化趋势来确定,可在设计时先行选择。
(3)通过对Hmax以及各工况边界条件的设定,可以避免VSG单元超出其最大功率输出限值,保证蓄电池和换流器的安全运行,提高M-FVI控制策略的实用性。
5 硬件在环实验验证与分析
为验证所提控制策略的正确性与有效性,本文搭建了如图11所示的控制器级硬件在环测试平台。该系统由RT-LAB实时仿真器、DSP控制器以及上位机等构成。本文所提M-FVI控制方法以及与之对比分析的VSG、FVSG控制方法均部署在DSP控制器中,图11所示的四端系统实时仿真模型部署在RT-LAB中,DSP运算产生的PWM脉冲经光电隔离模块与RT-LAB的脉冲输入端口相连,实验波形在录波仪DL850上进行测量。为了能够更直观地对比分析不同的虚拟惯性控制策略对系统性能的影响,将录波仪的数据导出并通过绘图软件将不同的实验波形绘制在同一坐标系下。光伏侧额定辐照度为1 000W/m2,稳态负荷为4.33kW,蓄电池额定电压为270V,额定容量为7A·h,以便在短时间内观察到SOC的变化,直流母线额定电压为500V。其他具体参数见表2。
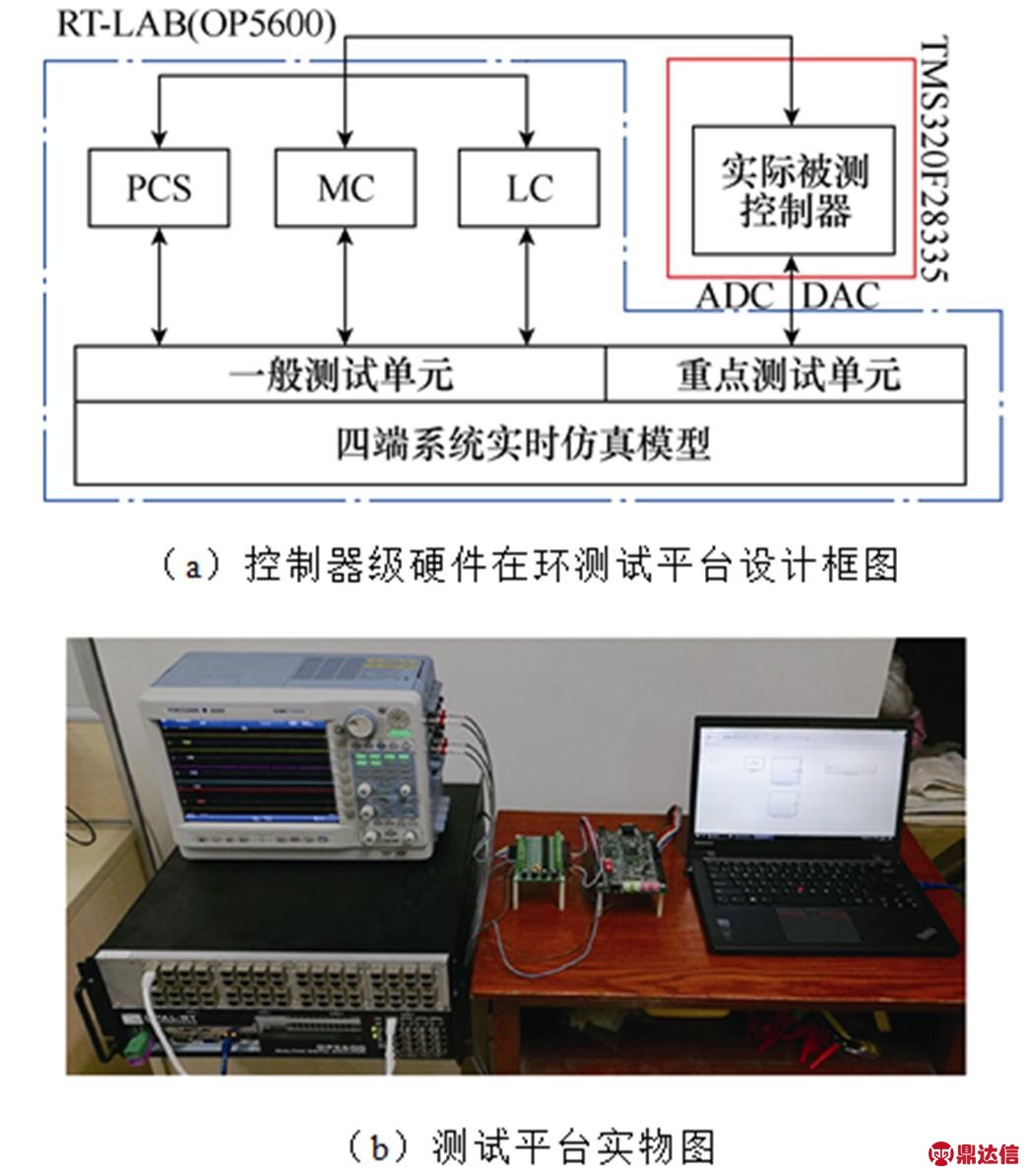
图11 硬件在环实验平台
Fig.11 Hardware-in-the-loop experimental platform
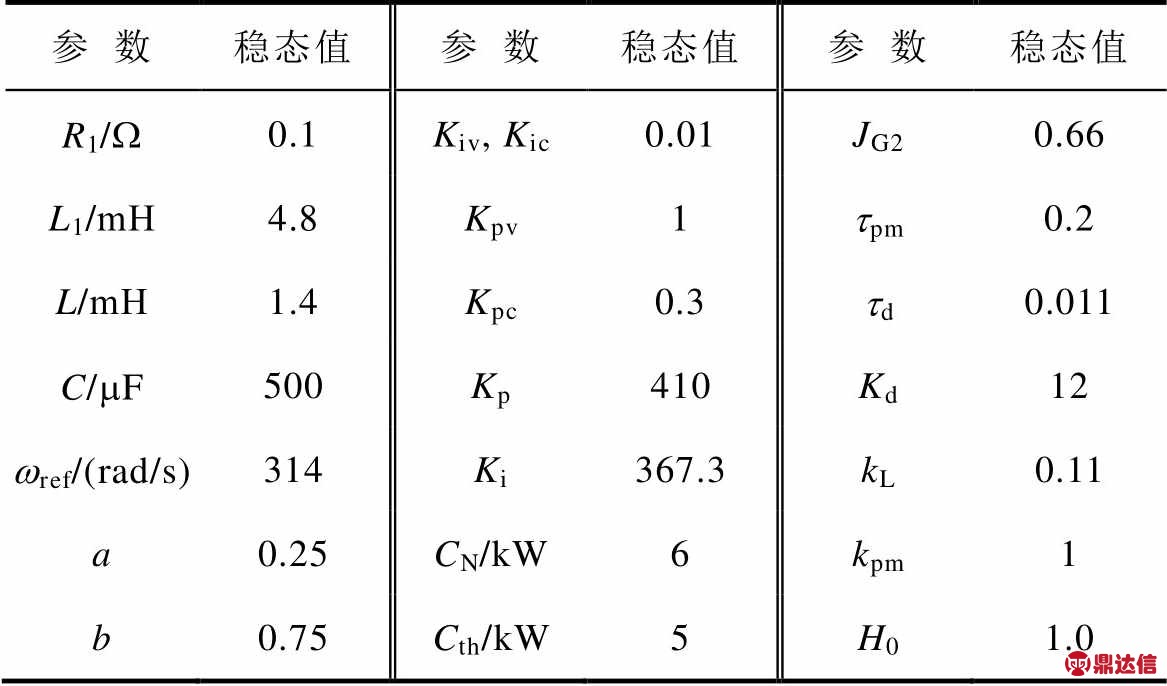
表2 四端系统参数
Tab.2 Four-terminal system parameters
5.1 蓄电池充放电极限工况验证
在蓄电池充放电极限工况时,光储VSG单元采用式(8)中的M-FVI控制策略,通过与VSG控制策略对比验证本文所提控制策略的有效性。
图12所示为蓄电池充电极限的阶跃响应特性,在系统运行10s时切除负荷2kW,为验证蓄电池充电极限状态,设置其SOC初始值为0.772。图13所示为蓄电池充电极限时受高频扰动的响应特性,10s时,将发电机G1恒定的功率变为高频波动功率,用以改变蓄电池的有功出力。
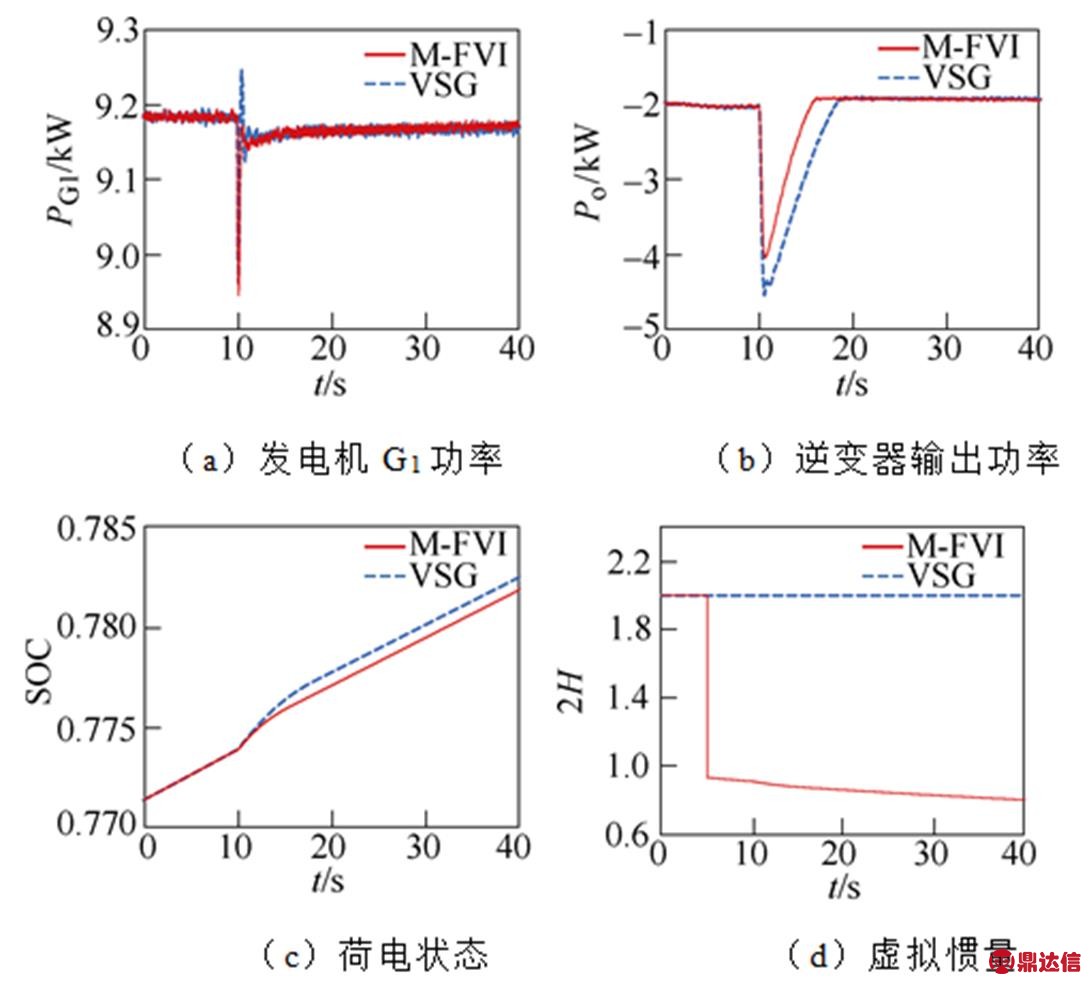
图12 充电极限系统阶跃响应
Fig.12 Step response of system with charging limit
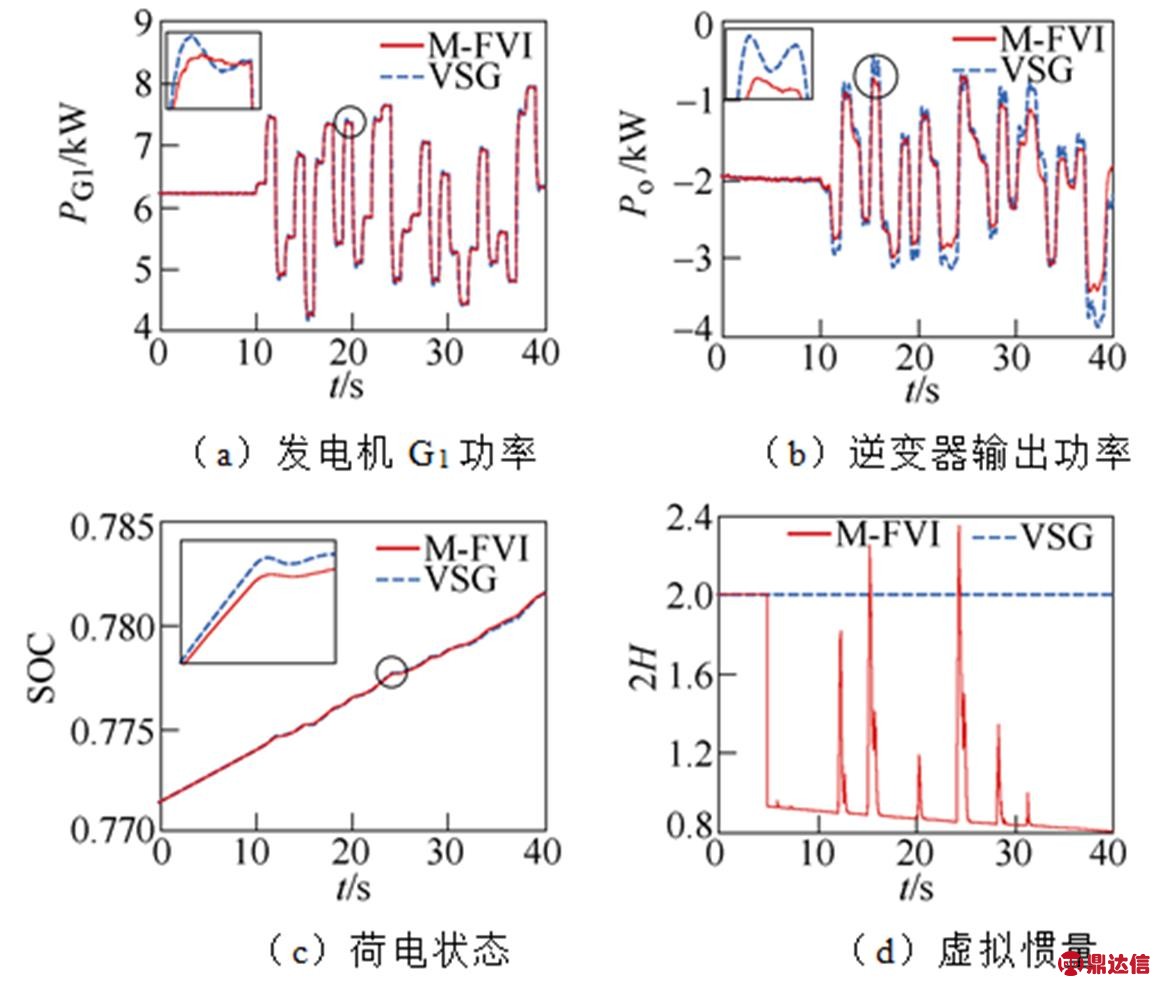
图13 充电极限系统高频扰动
Fig.13 High-frequency disturbance response of system with charging limit
从图12和图13可以看出,处于充电极限的蓄电池,无论是阶跃响应还是高频波动,对应的虚拟惯量随着蓄电池SOC的增大而减小,相比于恒定惯量的VSG控制策略,M-FVI控制中蓄电池SOC上升相对缓慢,有功出力相对较小,系统动态响应性能有所改善,蓄电池的工作情况得到改善。同样,处于放电极限工况的蓄电池SOC下降相对缓慢,也可以改善蓄电池的工作状态,限于篇幅不再给出。根据测试结果可知,本文所提M-FVI控制策略相较于VSG控制策略更有效,在蓄电池过充或过放工况下减少蓄电池出力,改善蓄电池的工作状态,且在一定程度上提高系统充放电稳定性。
5.2 换流器极限运行工况验证
为验证换流器极限运行状态时所提M-FVI控制策略的作用效果,将其与FVSG控制策略进行对比。此时换流器容量为主要影响因素,权重系数设为0.8,频率变化率以及系统单位时间功率可调量均为次要影响因素,权重系数均设为0.1。换流器极限运行状态如图14所示,10s时投入负荷2kW,换流器阈值容量Cth为5kW,图14b中换流器瞬时交换功率超过5kW,FVSG控制策略出现了过电流停机现象,而M-FVI控制策略通过调节系统参数使虚拟惯量H降低,满足式(21)的约束条件,从而避免了过电流停机。从图14c可以看出FVSG控制因过电流停机频率响应效果很差,严重影响系统的频率稳定性。
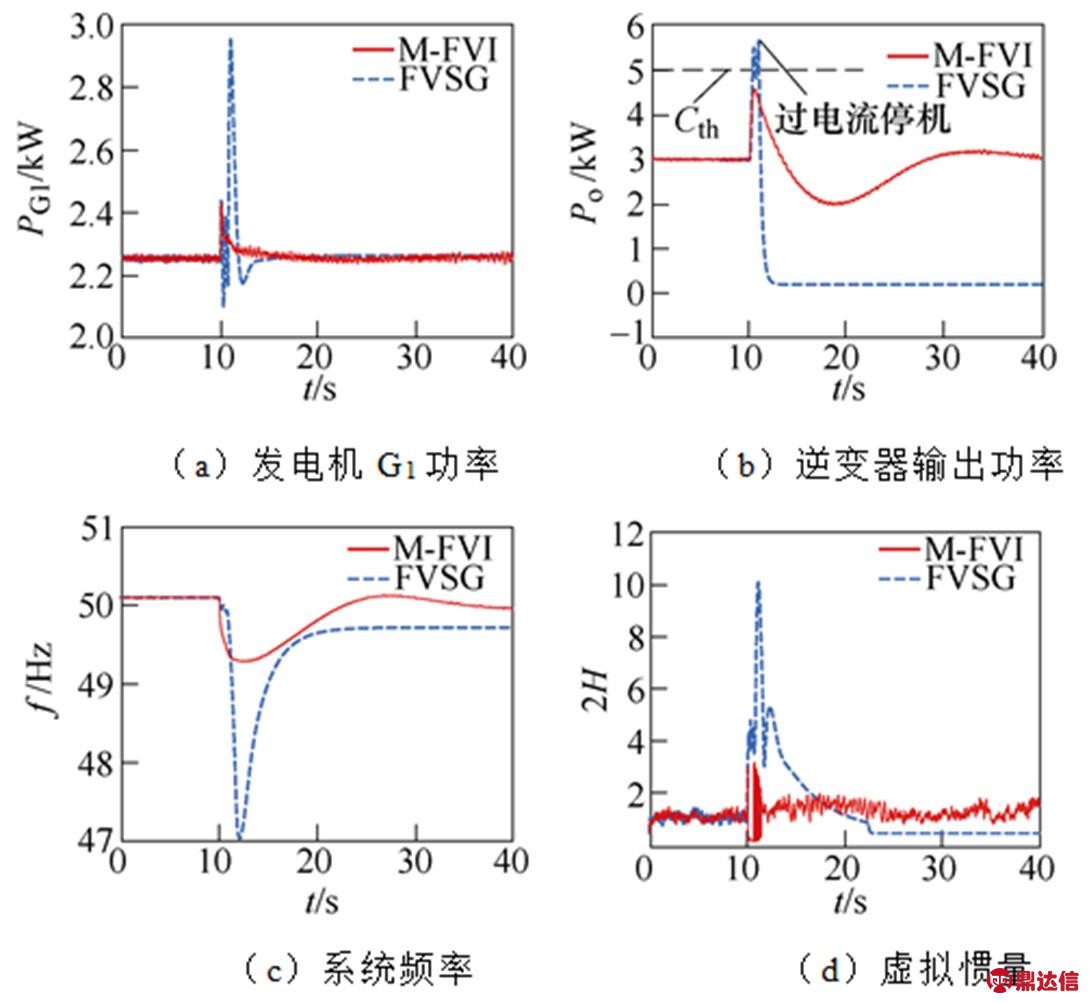
图14 换流器极限运行状态
Fig.14 Inverter limited operating condition
5.3 安全运行工况验证
为验证蓄电池以及换流器安全运行状态时M- FVI控制的有效性,将其与FVSG控制进行对比。安全运行状态如图15所示。此时频率变化率为主要影响因素,权重系数设为0.8,换流器容量及单位时间功率可调量均为次要影响因素,权重系数均设为0.1。5s时发电机G1端加入高频扰动。图15d中M-FVI控制策略通过调节系统参数使虚拟惯量H大于FVSG控制下的虚拟惯量,满足式(21)的约束条件。因此从图15c中可以看出,M-FVI控制策略相较于FVSG控制策略而言,可以有效降低系统频率变化。同时,由于H的增大,从图15b可以看出M-FVI控制的VSG输出功率响应略差,但在换流器阈值容量范围内,不会对换流器造成影响,能够保证设备的安全运行。
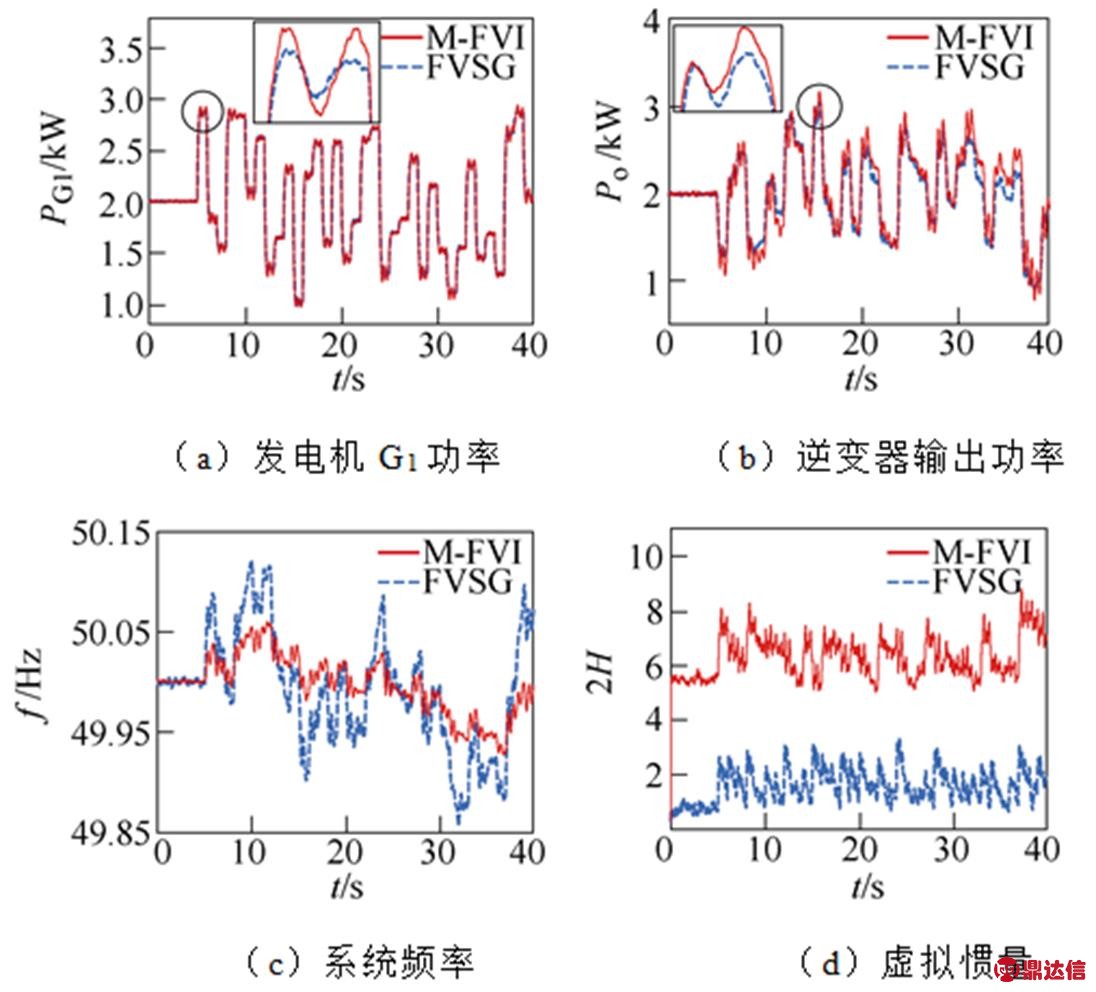
图15 安全运行状态
Fig.15 Safe operating condition
整体而言,由于权重系数的作用,M-FVI控制策略在换流器容量受限时可以通过调节H优先控制换流器瞬时交换功率不越限,保证换流器的安全运行,且能维持系统的频率稳定性,在设备安全运行时,主动调节H降低频率的变化,在保证设备安全运行的前提下提高系统频率稳定性,较FVSG控制的性能更优。
6 结论
1)针对光储单元提出的M-FVI控制策略,在兼顾虚拟惯性灵活调节的基础上,充分考虑了蓄电池荷电状态、系统频率变化率、换流器容量以及系统单位时间功率可调量等多约束的影响,具有较高工程实用性。
2)通过建立四端小信号模型及根轨迹分析得到了关键参数对系统稳定性的影响规律,在此基础上采用层次分析法以及三维曲面图分析给出了主要控制参数的设计方法及原则,并探究得到系统稳定运行的边界约束条件,增加了参数设计的准确性。
3)无论是系统极限运行状态下还是正常工况下,本文所提策略能够根据各约束的影响程度主动调节虚拟惯量的大小,从而改善系统的稳定运行性能,提高蓄电池、换流器等设备的使用寿命,对于VSG控制算法的工程化应用具有一定的参考意义。
附录 小信号模型参数
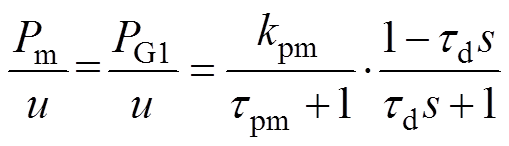
Ab、AG1、AG2、B1、B2分别为系统小信号模型系数矩阵Asys中的非零元素,有
(A1)
Ab=
(A2)
 (A3)
(A3)
 (A4)
(A4)
(A5)
 (A6)
(A6)
M0、M1分别为
(A7)
 (A8)
(A8)
式中,j10为逆变器输出电压相位的初始值。


