
1 引言
以玻璃幕墙为主要装饰材料的摩天大楼正在迅速崛起,形成了巨大的玻璃幕墙清洗市场。玻璃幕墙清洗的高成本及高风险性成为市政清洁的一大难题,但这为高空玻璃幕墙清洗机器人提供了巨大的发展空间。传统的人工清洗作业需要工人克服巨大的心理恐惧,且存在诸多的安全隐患。鉴于此,研发一种适合当今社会建筑发展、性能好、特点鲜明、作业安全可靠的高空玻璃幕墙清洗机器人十分必要。
高空玻璃幕墙清洗机器人是一种垂直吸附在玻璃墙面上通过自由移动实现对墙面清洗,融合传感技术、控制、机构学等为一体的高科技产品,可有效替代人工进行高空极限作业,降低人工作业的危险性,不仅极大地提高了清洗工作效率,还能降低清洗成本。
2 机器人总体设计方案
机器人在高空玻璃幕墙上进行安全、高效的玻璃幕墙清洗,必须具备足够的吸附和移动功能,同时,还应具备意外事故的应急能力,以保证机器人自身设备及他人的安全。此外,还应具有高效的清洗功能,以保证玻璃墙面的洁净性。所以,高空玻璃幕墙清洗系统应具备PLC智能控制模块、吸附模块、清洗模块、移动模块、传感器模块、风速监测模块、无线遥控模块等,其中,为了能使清洗机器人精确检测玻璃壁面的障碍物,在传感器及风速监测模块的选择上应具有广泛的适用性,且不易受到外界电磁光线等因素的干扰。设计流程如图1所示。
机器人主体主要包括三大功能:吸附功能、移动功能、清洗功能。吸附功能是实现机器人在玻璃墙面上移动清洗的基本功能,采用多个真空吸盘均匀分布在每条履带上构成移动机构,通过履带移动及真空阀的控制可有效实现机器人在玻璃墙面上的移动,采用履带式真空吸盘组使机器人具有强大的吸附力,支撑机器人在高空玻璃外墙进行工作。
清洗系统的设计采用清洗液过滤循环利用的原理,符合机器人整体轻量化的设计。清洗功能涉及到物理清洗以及化学清洗两种清洗方式,采用雾化水喷射、海绵擦洗、刮板带水挂脏以及污水过滤回收系统,此功能具有节水、环保、低噪和不损伤玻璃墙面等优点。清洗功能过滤循环原理如图2所示。
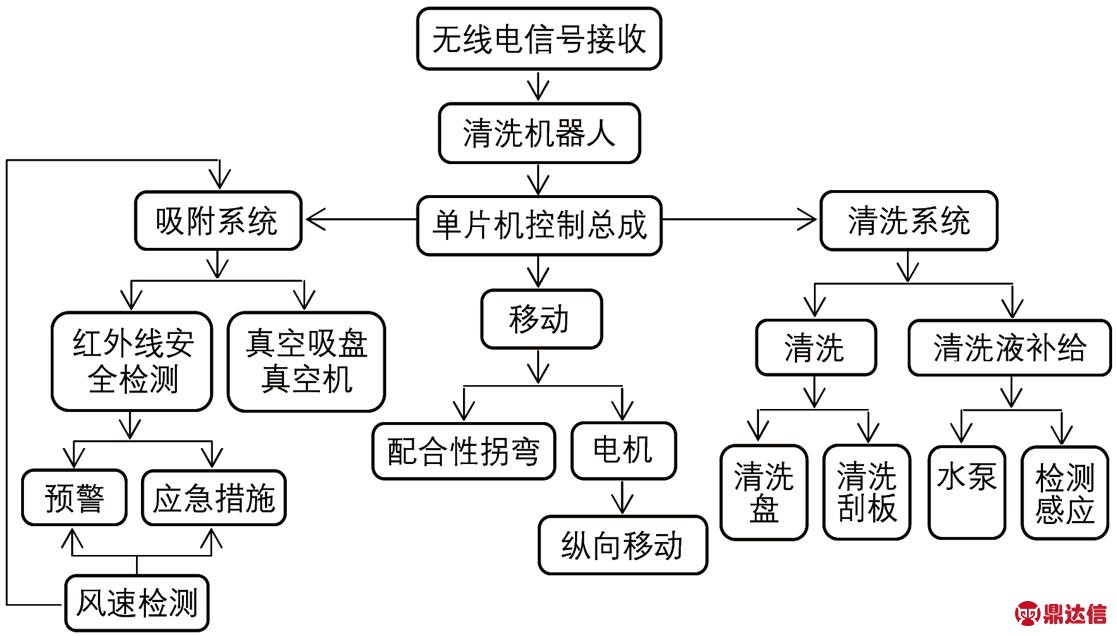
图1 高空玻璃幕墙清洗机器人设计流程图
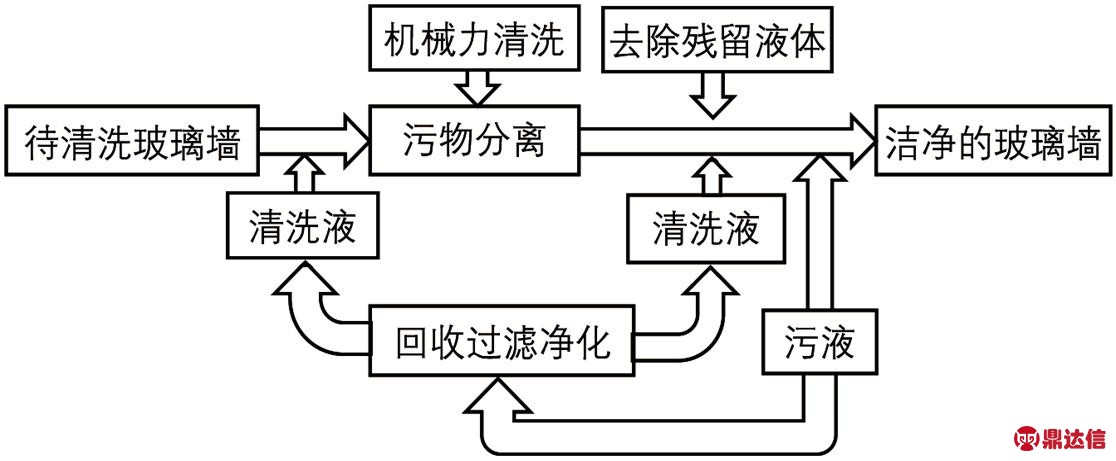
图2 清洗功能过滤循环原理图
3 机器人控制分析
控制系统的功能实现是通过PLC智能控制机器人各个部分系统的正常工作。控制系统设计应遵循安全、可靠、高效的原则,以确保机器人的工作状态。机器人选用整体式PLC智能控制系统,将电源、CPU、I/O接口集中在一个机箱内,具有结构紧凑、体积小、操作简单等特点,更有利于机器人整体控制编程设计。
PLC控制系统结构如图3所示。
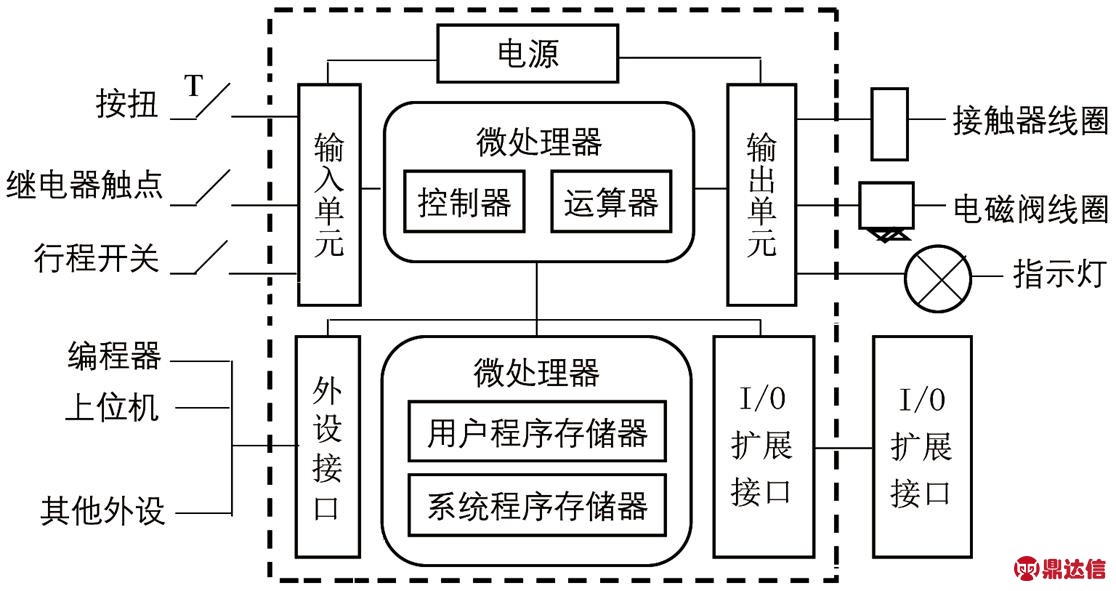
图 3 PLC控制系统结构图
4 风载仿真分析
根据《玻璃幕墙工程技术规范一》(JGJ 102—2003)高空作业要求,幕墙外表面的检查、清洗、保养与维修工作不应在4级以上风力下进行。所以,在考虑清洗机器人本体最危险的状态时,假定其所受风荷载最大值是4级风产生,且大小恒定不变,当清洗机器人本体外框架上的4个吸盘组与玻璃幕墙处于脱离状态,内框架的4个吸盘组与玻璃幕墙处于吸附状态,风荷载方向竖直向下,此时最易出现滑落和倾覆,所以,将此时风荷载作为清洗机器人本体最不利静力风荷载。
最不利风荷载作用在清洗机器人本体上可以近似认为以集中力的形式施加于内外框架的连接处,集中力Fmax为:
Fmax=Smax·Wp (1)
式(1)中:Smax为机器人本体在水平面上的投影,即迎风面面积,m2;Wp为4级风产生的风压,N/m2。
4级风产生的风压Wp可由 确定。
确定。
在标准状态(气压为101.325 kPa,15 ℃)下,空气重度i=12.25 N/m3;纬度为45°海平面处的重力加速度g=9.8 m/s;4级风的风速v为5.5~7.9 m/s,取v=7.9 m/s。将i=12.25 N/m,g=9.8 m/s2和v=7.9 m/s代入 中,得到在4级风下产生的风压为Wp=39 N/m,结合机器人外形尺寸,得出最不利风荷载等效为集中力为Fmax=7.37 N。
中,得到在4级风下产生的风压为Wp=39 N/m,结合机器人外形尺寸,得出最不利风荷载等效为集中力为Fmax=7.37 N。
5 结束语
本文从主体设计、控制分析、仿真分析三个方面研究了高空玻璃幕墙清洗机器人,笔者团队根据此设计思路制作了模型,经过不断地设计、修改、完善,实现了预期效果,是国内唯一无需绳索或轨道进行辅助的高空玻璃幕墙清洗机器人,填补了国内无索轨式清洗机械的空白。在社会文明不断发展的今天,科技创新是提高社会生产力和综合国力的战略支撑,国家政策要求加大力度研发智能机器人代替高危人工作业,全新一代高空玻璃清洗机器人将有效代替人工进行极限作业,在未来具有广阔的发展空间。
参考文献:
[1]郝少鹏,邓凯吉,董志方.屋顶太阳能电池板智能清洗机器人设计[J].山东工业技术,2019(5):98.
[2]代峰燕,邢爽,陆营,等.管程清洗机器人导轨的轻量化多目标优化设计[J].北京石油化工学院学报,2019,27(1):67-71,80.
[3]刘凌.玻璃幕墙清洗机器人攀爬部分结构研究[J].机械设计与制造工程,2018,47(1):46-49.
[4]唐华.一种外墙清洗机器人控制系统[J].电子测试,2018(1):25-26.
[5]梁子跃,蔡强,杨昊,等.基于注射器吸附的玻璃幕墙清洗机器人设计[J].电子器件,2018,41(1):274-278.
[6]张勇.玻璃幕墙清洗机器人电气控制系统的研究[D].大连:大连理工大学,2018.


