
摘 要:该文提出了一种利用角度和多普勒频率的一发一收外辐射源定位体制,针对运动目标,给出了接收站的最优航迹规划。该文采用定位的位置误差(Geometrical Dilution Of Precision, GDOP)作为优化对象,具体分析2维目标定位的优化问题,通过一边估计目标一边优化接收站运动的方法,使用无迹卡尔曼滤波(Unscented Kalman Filter, UKF)估计目标的位置和速度,以达到在定位的各个时刻能够得到最优的定位精度。仿真实验验证了该方法的有效性。
关键词:外辐射源定位;一发一收定位体制;航迹优化;无迹卡尔曼滤波(UKF)
1 引言
在日益复杂的现代战场上,传统的定位系统已经很难完全满足现代战争的要求,迫切需要寻找新的定位方法。基于外辐射源的无源雷达利用手机基站信号、卫星信号、普通的调频广播、电视信号等民用机会照射源,通过探测空中目标的微弱反射信号来检测和跟踪目标。外辐射源雷达由于具有抗隐身、抗干扰、抗突防以及生存能力强等一系列优点,受到了各国重视并展开了许多相关的研究工作[1-19]。常规的多发多收或者一发多收外辐射源定位系统,由于隐蔽性较强、定位精度较高而获得了大量的研究。但由于多个接收站之间数据存在通信开销和同步问题,降低了其无源定位的效率。
为此,本文提出了一发一收的运动接收站外辐射源定位体制,利用优化接收站轨迹的方法,对运动目标进行优化定位[20,21]。对于以电视信号为代表的外辐射源而言,其典型特征就是具有很窄的载频分量,极易获取目标的方向信息和多普勒频率信息[22,23],本文在获取角度与多普勒频率的基础上,利用GDOP误差最小原则,以无迹卡尔曼滤波(UKF)[24]为工具,对接收站进行航迹优化,并实现目标的最优定位。其内容安排如下:第2节为目标定位模型,第3节为优化方案与定位算法,第4节为仿真实验,第5节为结论。
2 目标定位模型
联合角度和多普勒频率定位主要包括两个部分:利用接收站对目标的测量,融合所测量的信息使用无迹卡尔曼滤波器估计目标的位置。无迹卡尔曼滤波的结果直接用于生成第3节接收站轨迹的优化函数。
2.1 观测模型
本文建立一个2维的观测模型,如图1所示。图1显示了在2维条件下,外辐射源,观测站以及目标之间夹角的直角坐标关系示意图。其中, 是外辐射源,其坐标为
是外辐射源,其坐标为 。
。 是接收站,其
是接收站,其 时刻坐标为
时刻坐标为 ,速度为
,速度为 。
。 为运动目标,其时刻坐标为
为运动目标,其时刻坐标为 ,速度为
,速度为 。观测站可以获得目标的角度信息
。观测站可以获得目标的角度信息 和目标与接收站相对运动的多普勒频率
和目标与接收站相对运动的多普勒频率 。
。
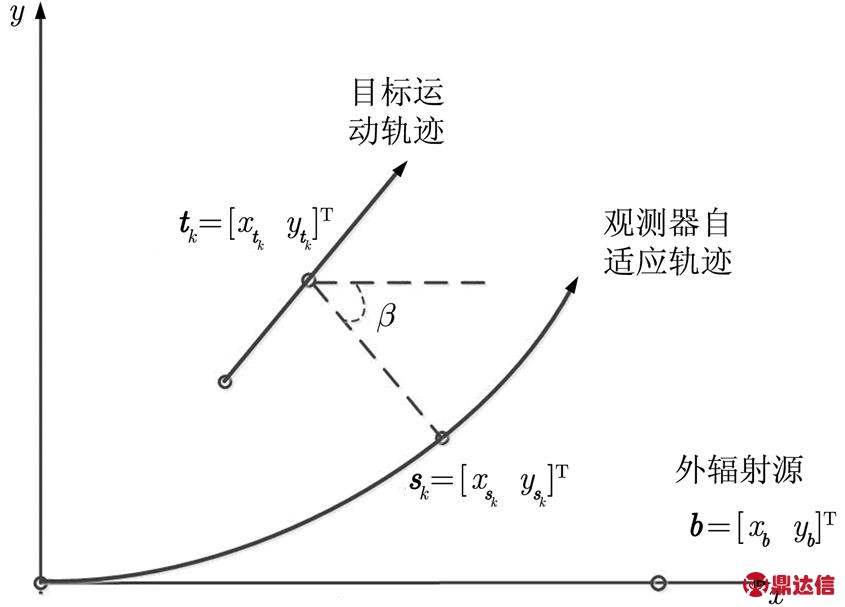
图1 基于一发一收的外辐射源运动观测器定位示意图
Fig. 1 Schematic diagram of passive location systems based on one transmitter and one receiver
观测站首先得到时刻的目标的方位角,多普勒频率,可以建立如式(1),式(2)的观测方程
 (1)
(1)
 (2)
(2)
分别为测角噪声和多普勒频率噪声。c为光的传播速度,为求向量的模。
将式(1),式(2)在时刻的观测方程写成矩阵的形式:
 (3)
(3)
式中: 为由(1),式(2)所确定的测量方程。
为由(1),式(2)所确定的测量方程。 表示时刻的目标状态向量。
表示时刻的目标状态向量。 表示时刻的观测向量,
表示时刻的观测向量, 为测量误差向量,其协方差矩阵为
为测量误差向量,其协方差矩阵为 。
。
2.2 状态模型
假设目标的运动方式是2维平面内匀速直线运动,它在第时刻的状态变量为。假设系统没有状态噪声,则接收站的运动状态方程为:
 (4)
(4)
其中
A表示状态转移矩阵,![]() 为测量周期。
为测量周期。
3 优化方案与算法
3.1 接收站运动建模
接收站通过运动调节和目标的几何关系可以得到目标更精确的测量信息,从而减小定位误差。由于接收机观测站的功率有限,故假定其速率是一个恒定的值 ,它在时刻到
,它在时刻到 时刻的运动方向为
时刻的运动方向为 ,位置为,则在时刻在位置:
,位置为,则在时刻在位置:
 (5)
(5)
3.2 UKF跟踪滤波
我们已经得到了系统的模型:
 (6)
(6)
 (7)
(7)
时刻的目标状态均值为 ,误差协方差矩阵为
,误差协方差矩阵为 。
。
滤波过程:
(1) 选定滤波初值
 (8)
(8)
![]()
![]() (9)
(9)
(2) 计算Sigma点
 (10)
(10)
 (11)
(11)
 (12)
(12)
(3) 时间更新
(13)
 (14)
(14)
 (15)
(15)
(16)
 (17)
(17)
(4) 测量更新
 (18)
(18)
 (19)
(19)
 (20)
(20)
(21)
 (22)
(22)
其中权值
 的确定如下:
的确定如下:
(23)
l是第1个标度参数,其表达式为。一般取比较小的正数(例如取 0.001),它确定围绕状态向量 均值的sigma点的分布。是一个常数,为状态向量分布的先验知识,对高斯分布一般取2。
均值的sigma点的分布。是一个常数,为状态向量分布的先验知识,对高斯分布一般取2。
3.3 优化对象GDOP与算法流程
观测器通过运动,调节和目标的几何关系可以得到目标位置更加精确的测量信息,从而减小定位误差。定位的位置误差 ,其中是
,其中是 的第
的第![]() 行第
行第![]() 列的元素。在用无迹卡尔曼滤波进行定位跟踪时,由式(22)可知,与
列的元素。在用无迹卡尔曼滤波进行定位跟踪时,由式(22)可知,与 有关。而
有关。而 的计算与时刻的观测器状态有关。也就是说在计算
的计算与时刻的观测器状态有关。也就是说在计算 时,只有时刻观测器的位置一个未知量。我们假设已知时刻的观测器状态,要知道观测器下一时刻的位置只需要知道,所以只需要优化得到的值,就可以找到观测器最优的下一个时刻的位置。算法的流程图见图2。
时,只有时刻观测器的位置一个未知量。我们假设已知时刻的观测器状态,要知道观测器下一时刻的位置只需要知道,所以只需要优化得到的值,就可以找到观测器最优的下一个时刻的位置。算法的流程图见图2。
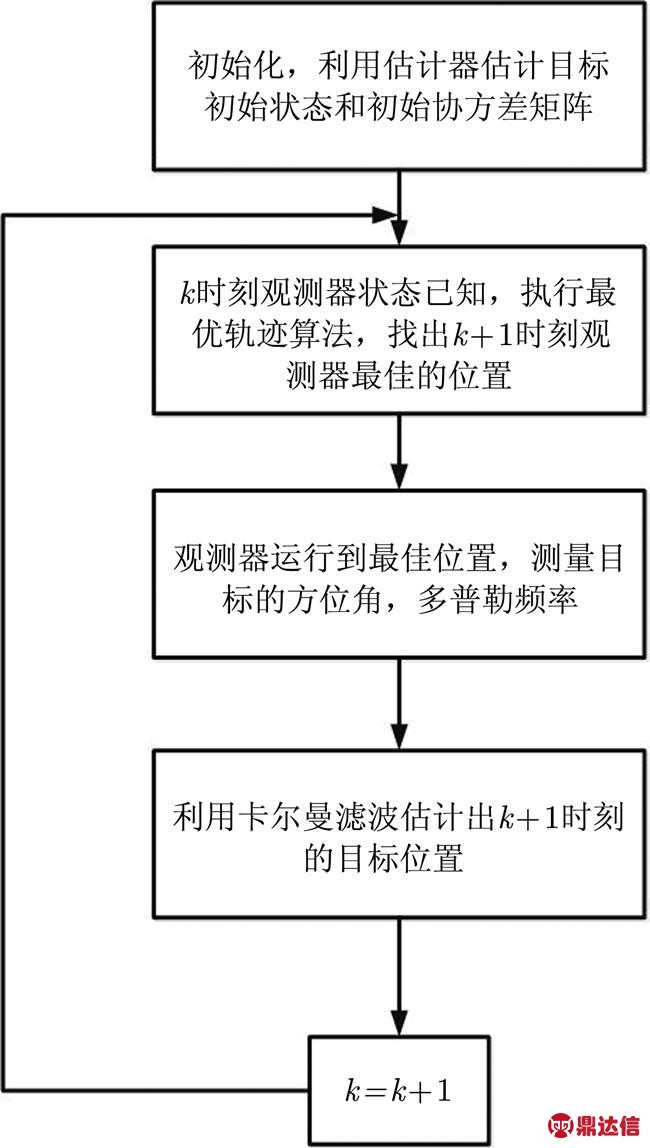
图2 算法流程图
Fig. 2 Algorithm flowchart
算法流程:
(1) 初始化,利用估计器计算初始状态和初始协方差。
(2) 已知时刻观测器的位置,通过优化找到最优的运动方向角,由于观测器的速率是恒定的,此时 。
。
(3) 观测器运动到,测到时刻的和,估计。
(4) 令 ,重复步骤(2)到步骤(4)。
,重复步骤(2)到步骤(4)。
4 仿真实验
取观测器的初始位置为坐标原点(0, 0) km,外辐射源的坐标位置为(200, 10) km,目标的初始位置为(100, 100) km。目标的速度为 100 m/s,目标以方向角为p/4运动。观测器每隔一秒对目标观测一次,测角误差为 ,多普勒频率误差为1 Hz。定位误差定位为
,多普勒频率误差为1 Hz。定位误差定位为 。
。
4.1 仿真实验1
定义,其中 分别为观测器和目标的速率。实验1为从不同的速率比分别进行仿真,以下为进行100次蒙特卡罗实验得到的仿真图。从图3(b)-图3(d)3个图可以看出,当观测器的速率比目标观测器的速率更小时,也可以进行定位跟踪,但是要达到比较高的精度所需时间比较长。观测器与目标的速率的比值越大,定位的误差收敛速度更快,定位跟踪的效果更好。
分别为观测器和目标的速率。实验1为从不同的速率比分别进行仿真,以下为进行100次蒙特卡罗实验得到的仿真图。从图3(b)-图3(d)3个图可以看出,当观测器的速率比目标观测器的速率更小时,也可以进行定位跟踪,但是要达到比较高的精度所需时间比较长。观测器与目标的速率的比值越大,定位的误差收敛速度更快,定位跟踪的效果更好。
4.2 仿真实验2
实验2给出了不同观测器运动轨迹对目标跟踪定位的对比,以下为进行100次蒙特卡罗实验得到的仿真图。如图4(a)所示,观测器的直线运动轨迹如蓝色线所示,运动方向角为p/3。观测器圆形运动轨迹如红色线所示,它的初始运动方向为,最后时刻的运动方向为 。绿色线为自适应观测器运动轨迹。从定位误差对比图4(b)可以看出,自适应运动的观测器比任意给定的直线运动轨迹观测器和圆形轨迹观测器的定位效果要更好,误差收敛更快,最后定位的精度也更高。
。绿色线为自适应观测器运动轨迹。从定位误差对比图4(b)可以看出,自适应运动的观测器比任意给定的直线运动轨迹观测器和圆形轨迹观测器的定位效果要更好,误差收敛更快,最后定位的精度也更高。
5 结论
本文提出了一种基于角度与多普勒信息的一发一收外辐射源运动接收站航迹优化的运动目标定位方法,该方法可以应用于窄带外辐射源定位系统,具有参数测量简单,通信开销较小的特点,可用于无人机侦察等领域。
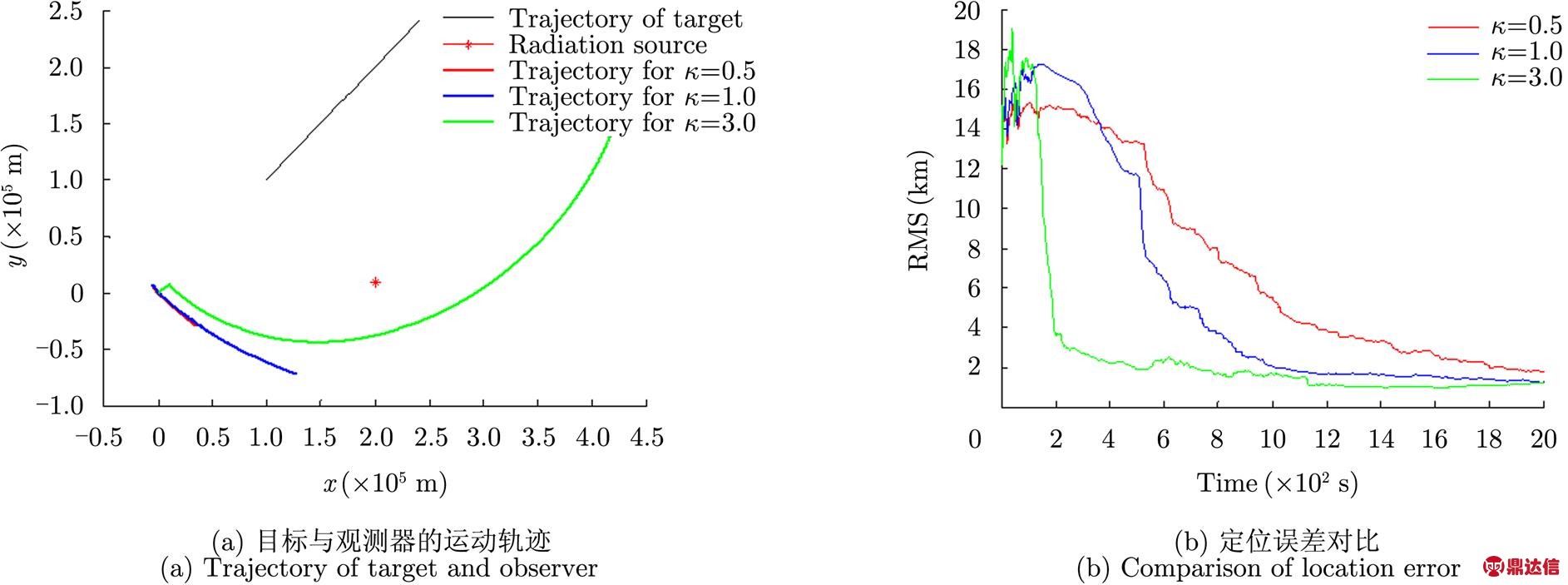
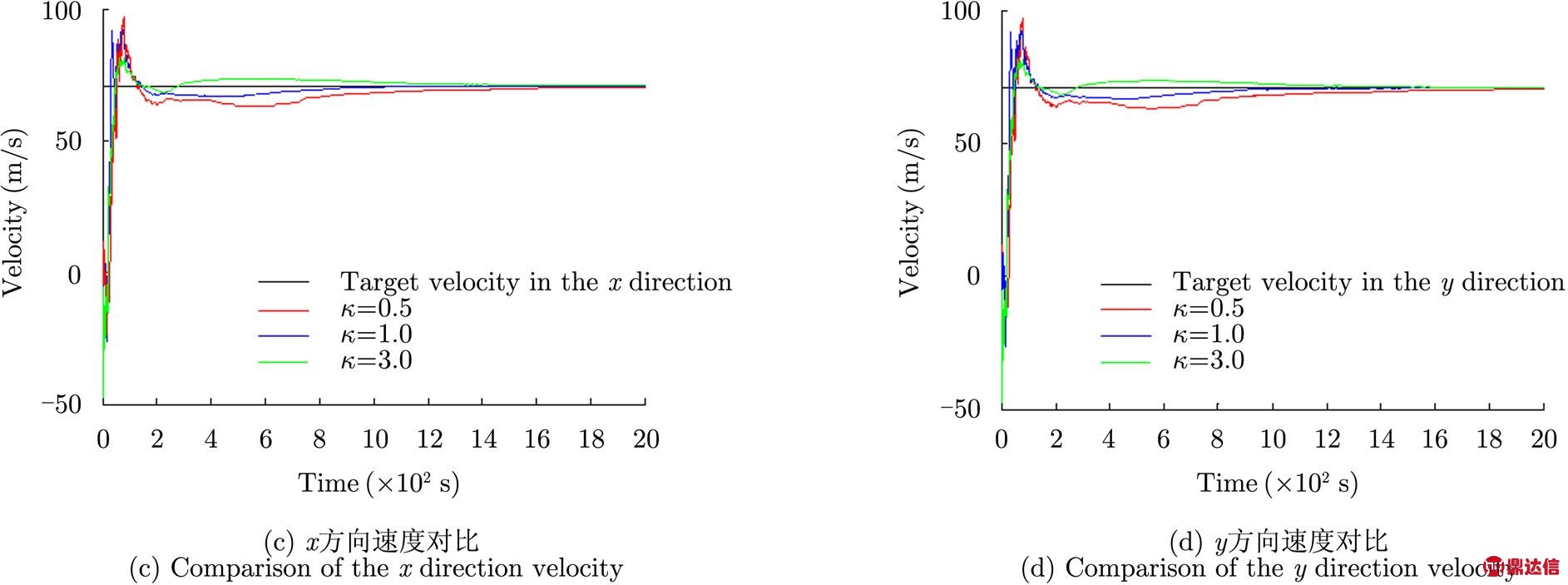
图3 不同 值的仿真图
值的仿真图
Fig. 3 Simulation of different
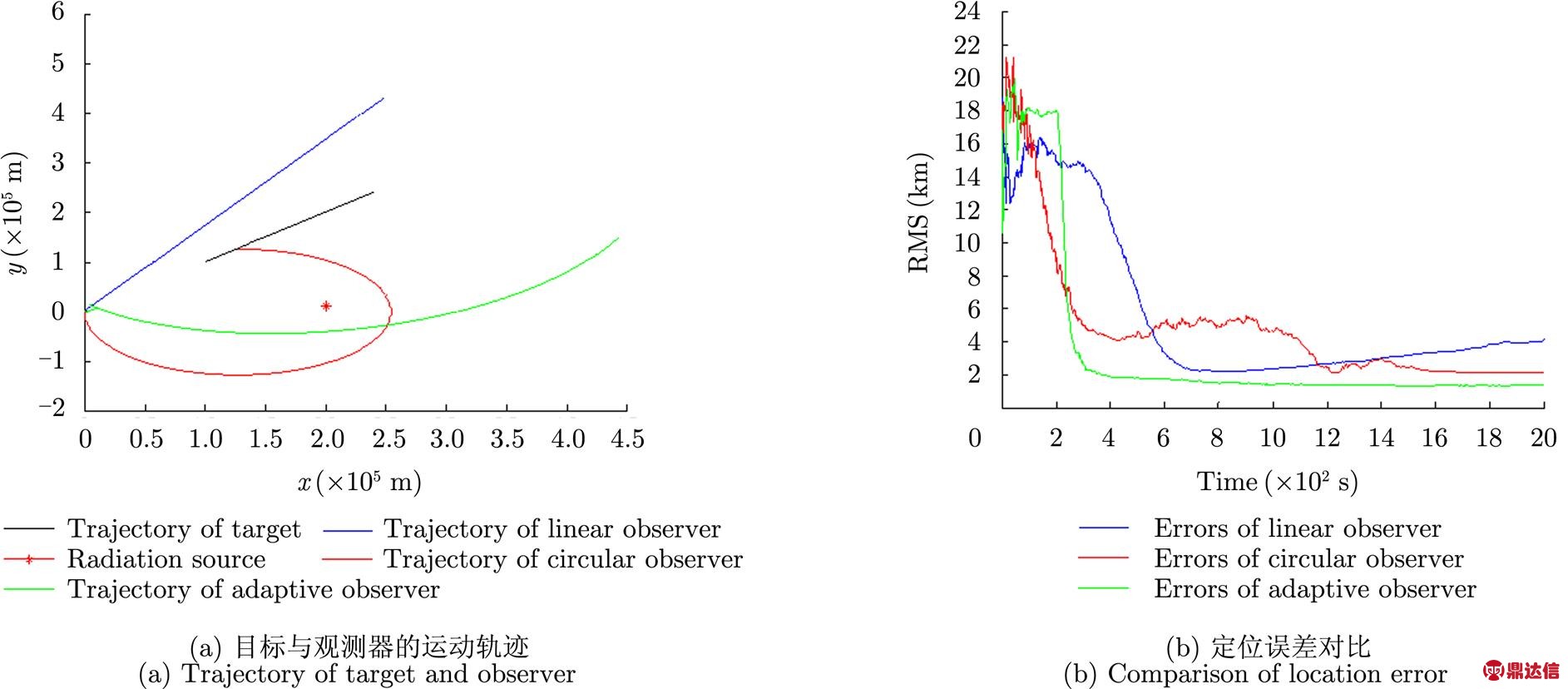
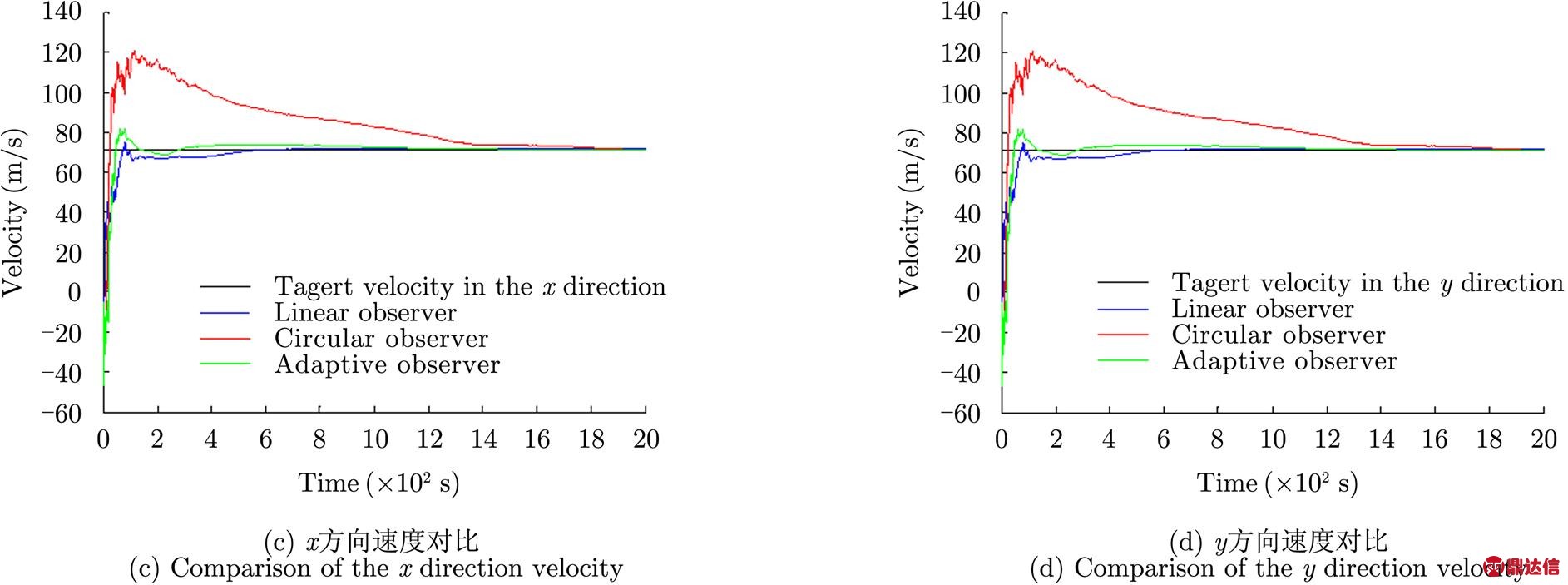
图4 不同观测器轨迹的仿真图
Fig. 4 Simulation of different sensor trajectory


