
摘要:通过设计基于PLC技术的数据采集系统和相应的算法,利用RS-232接口与GPS接收器进行通讯,完成实时分析和计算,自动采集GPS接收器采集到的位置信息。该系统通过以PLC核心控制器,利用通讯、数据分析技术等实施数据采集和利用,获得的定位数据可广泛应用于各类有地理位置信息需求的自动化控制系统。
关键词:全球定位系统;可编程控制器;RS-232;数据标准;通讯
0 引言
全球定位系统(GPS)的主要功能是通过空间卫星导航定位系统为陆、海、空3大领域提供实时、全天候和全球性的导航服务。GPS接收器在不同时间、地点能够通过测量卫星到接收器之间的距离,综合多颗卫星的数据进行计算,得到各种位置信息,然后通过实施编码以一定方式输出。可编程控制器(PLC)可采集GPS接收器发送数据,通过解码形成定位数据,最终用于各种需要地理位置信息的工业自动化领域[1-2]。
GPS追踪系统[3-13]目前在导航、车辆监控、设备追踪等方面应用广泛,但控制器多以单片机、嵌入式系统、工业控制计算机为主。目前,在自动化领域,通过采用工业现场最常用的PLC作为控制器,来实现GPS接收器发送数据采集并进行解码的案例还不多见。
本课题采用NMEA0183 2.0协议[1]为接口协议设计数据采集系统。整个系统设计包括系统硬件设计、接口设计、控制能够设计和软件设计等。具体研究内容涉及到通讯、数据分析、控制模型、控制程序等方面内容。本控制系统可用于车辆监控、污水处理、水库监控等需要追踪设备地理位置的自动化系统,也可以作为定位数据模块用于各类远程监控系统等。
1 系统方案设计
(1)系统架构设计。整套数据采集系统以PLC为控制核心,通过设计控制电路、接口电路、通讯协议,最终完成从卫星获取定位数据[4]的功能[14-15]。基本工作原理是由GPS接收器搜索卫星并锁定,接收卫星发送的数据包,通过一次解码,然后将数据按照美国国家海洋电子协会的数据标准NMEA0183标准2.0版本发送给PLC,PLC通过二次解码将数据包中需要使用的数据进行筛选,最终经过筛选的数据被采集出来用于下一级的监控单元,如图1所示。
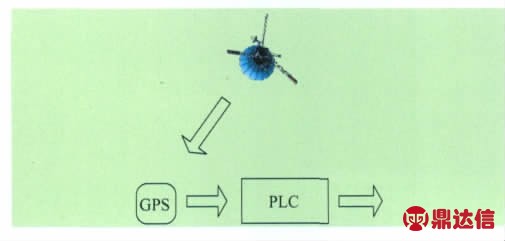
图1 工作架构设计
(2)控制系统硬件设计。本系统主要由定位数据采集设备、控制器、人机界面3部分组成,GPS接收器要求能够满足NMEA0183 2.0协议,控制器要求能够具备基本数学运算功能,人机界面要求能够和控制器有效连接通讯。
经过比较和分析,本系统控制器采用西门子CPU224XP为核心控制器、定位数据采集设备采用G-MOUSE GPS接收器、人机界面采用 SIEMENS TD400C。为了保证通讯连接,经由RS-232/PPI串行通讯接口连接GPS接收器和PLC,经由专用电缆连接PLC和TD400C,具体连接关系,如图2所示。
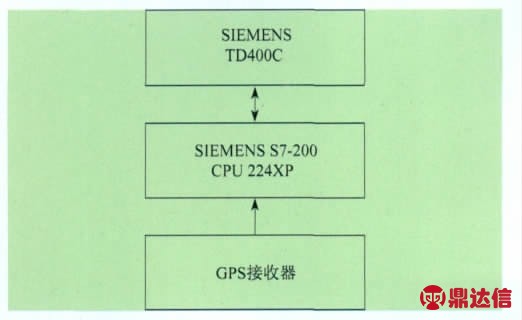
图2 控制系统框图
(3)PLC和GPS接收器的通讯接口设计。采用串行通讯方式,因为PLC和GPS接收器的通讯所采用的硬件接口为串行接口,由于西门子 S7-200 CPU224XP有2个通讯接口,每个通讯口是标准的半双工串行通讯口,本系统的2个通讯口的功能部署具体设计是:①端口1,设计用于和GPS接收器模块通讯,为了通讯将PLC设置成自由口通讯模式,具体电路设计为用RS232/PPI电缆将GPS接收器与PLC端口1进行连接。②端口0,设计用于PLC编程,具体电路设计为用RS232/PPI电缆将GPS接收器与PLC端口0进行连接。
自由口通讯模式设置方法是:根据NMEA 0183协议,通讯数据每帧数据格式为:数据位为8 bit,开始位为1bit,停止位为1bit,无奇偶校验位,无握手信号。根据以上要求,按照图3对RS-232/PPI电缆进行设置。
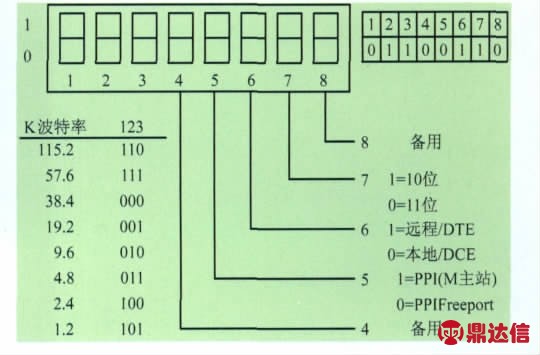
图3 RS232/PPI电缆设置图
2 GPS接收器定位数据发送格式
美国国家海洋电子协会NMEA 0183协议是目前GPS导航设备统一的RTCM(RadioTechnical Commission for Maritime Service)标准协议,该标准分为1.5、2.0 和4.0 标准,本设计采用2.0 版本,GPS 的通讯协议发送按照ASCII格式顺序发送,具体发送帧格式如表1所示。
表1 发送帧格式表
注:发送次序为$GPZDA、$GPGGA、$GPGLL、$GPVTG、$GPGSA、$GPGSV*3、$GPRMC
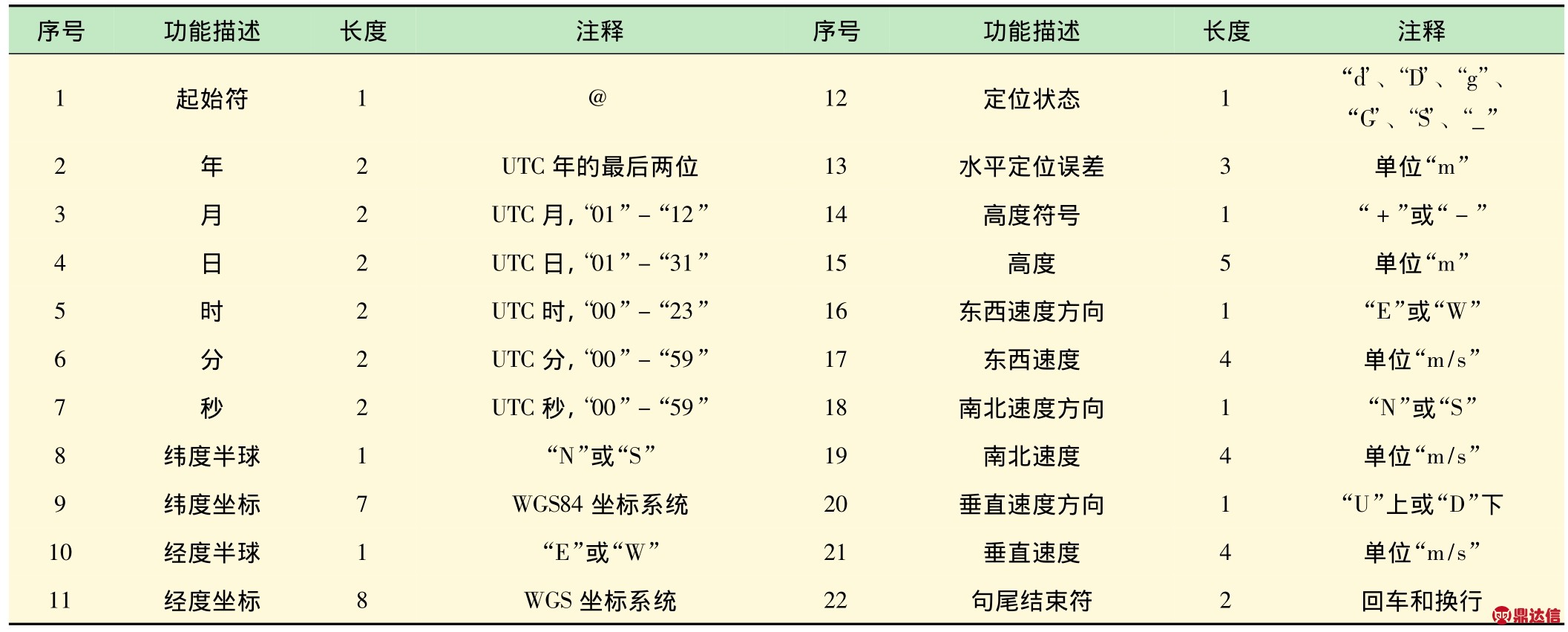
NMEA0183协议中对每个帧的具体格式做了详细的定义,具体如表2所示。
表2 帧格式表
帧中每段的解释如下:
序号1:“$”—帧命令起始位;
序号2:aaccc—地址域,前两位为识别符,后3位为语句名;
序号3:ddd…ddd—数据;
序号4:“*”—校验和前缀;
序号5:hh—校验和,$与*之间所有字符ASCII码的校验和(各字节做异或运算,得到校验和后,再转换16进制格式的ASCII字符);
序号6:<CR>回车符;
序号7:<LF>换行符。
3 GPS接收器发送定位数据采集的控制模型与系统软件设计
(1)GPS接收器发送定位数据分析。本系统数据自动采集的基本原理是根据GPS接收器发送的ASCII码文本文件格式进行分析和解码,通过对比发送数据和NMEA0183协议语句及相关帧数据格式,按一定周期解读出基本定位数据。
以“G-MOUSE XY-218”串口GPS接收器为例,该接收器的串口通讯波特率为4 800,定位数据更新周期为1000 ms,具体的ASCII文本标准格式如表3所示。
表3 定位数据标准文本格式
(2)数据分析模型建立。根据NMEA 0183协议规定,按照实际要求,我们通常按照以下规则读取定位数据:当读取当前定位坐标时,分析$GPRMC帧的推荐定位信息(Recommended Minimum Specific GPS/TRANSIT Data,RMC)数据;当读取速度数据时,分析$GPVTG地面速度信息(Track Made Good and Ground Speed,VTG)帧数据;当读取方向时,同样分析$GPVTG帧数据;当读取时间时,可分析$GPRMC帧数据。当读取卫星数及状态时,可分析$GPGSV可见卫星信息(GPS Satellites in View,GSV)和$GPGSA当前卫星信息(GPS DOP and Active Satellites,GSA)帧数据;其他数据可参考NMEA0183协议各帧具体定义选取,通过分析本系统控制模型如图4所示。
(3)控制模型软件设计。数据采集控制模型功能的实现,依靠软件通讯和控制器计算进行实现。基本方法采用比对法,通过比对ASII码数据和定位数据标准格式,完成数据筛选和采集。
具体实施过程为:在GPS接收器数据通过串行通讯输入PLC后,采用每周期计算,输出各相关定位具体数据,通过采用顺序控制的方法,可以对数据采集控制系统实施控制。每个周期设定时间为t,在PLC编程过程中采用中断程序设计,使用STR_FIND命令用于识别帧类型,使用STR_CPY命令用于复制帧数据,如图5所示。
(4)PLC与GPS接收器通讯和定位数据采集设计。本系统通过实施软硬件设计,由核心控制器西门子PLC通过运行系统功能块进行控制和计算,运算得出GPS系统的定位数据,经过西门子PLC进行转换后,连接下级TD400C文本显示器显示,完成PLC与GPS接收器的通讯和定位数据采集,如图6所示。
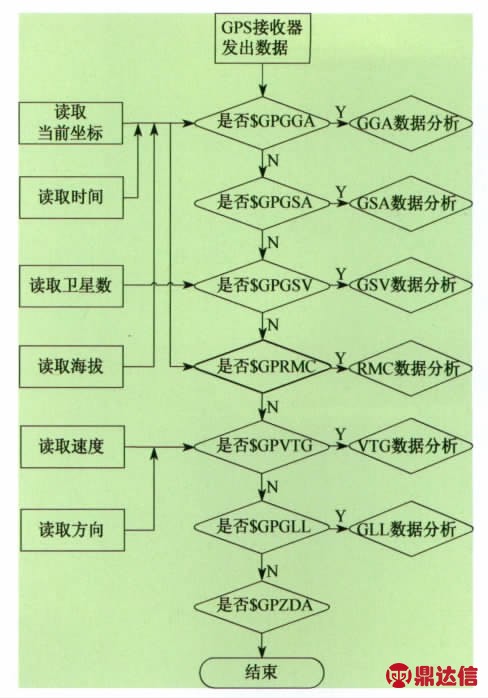
图4 控制模型图
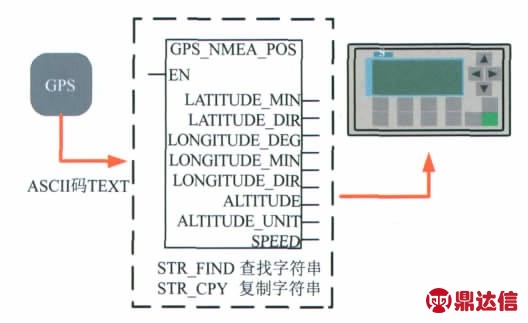
图5 系统运算实现方法
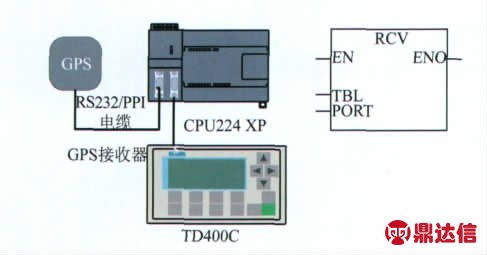
图6 系统实现方法
4 实践与经验
本课题实践中遇到定位产生漂移的问题,通过综合分析,最终确定了产生误差的2项主要原因:①设备在移动中测试速度过快,导致GPS接收器相应时间少于当前运行速度;②在位置有遮挡和天气不好的情况下,GPS信号经过多次反射、折射造成误差。以上2个问题通过设置数据缓冲和纠差编程得到了一定程度解决,但是物理和天气条件造成的影响很难避免。今后可考虑增加陀螺仪强化系统功能。
5 结语
本系统通过设计和实施PLC与GPS接收器通讯和数据采集设计,很好地发挥了工业现场控制器PLC的功能和用途。通过连接工业网络系统,还可以对功能进行进一步拓展,发挥更大功效,对设计GPS定位数据辅助控制自动化系统起到了很好的铺垫作用。


