
1 吸盘搬运机械手机构设计
吸盘机械手采用悬挂式结构安装于龙门架上,沿着三个相互独立垂直的坐标轴(即X轴、Y轴、Z轴)运动,最终使吸盘机械手到达设定的位置,该机械手适用于物品长距离的搬运、抓取。电控箱独立设计,与机械手分离,操作方便。图1为吸盘机械手搬运零件工作原理图,图2为龙门架悬挂式装吸盘机械手示意图。
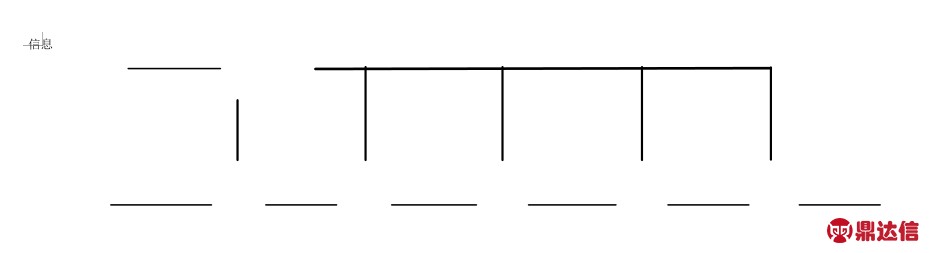
图1 功能原理图
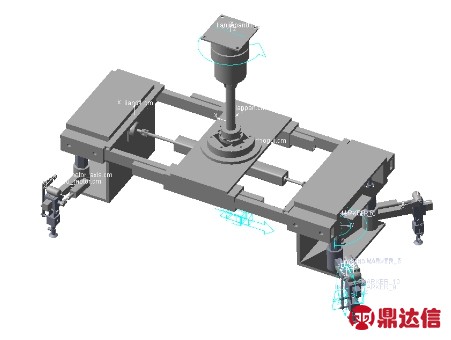
图2 龙门架悬臂式吸盘机械手
1.龙门架;2.供电箱;3.导轨;4.吸盘机械臂;5.电机
图3 局部放大图
1.辅助吸盘机构;2.主要作用吸盘机构
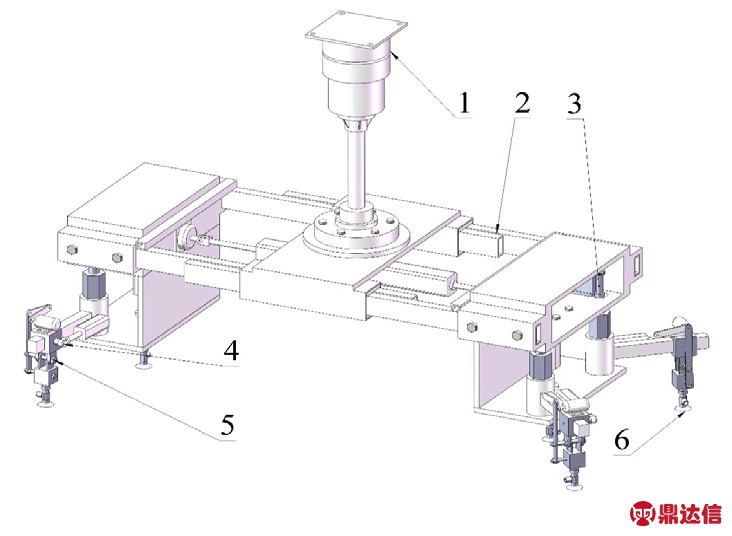
图4 四臂吸盘机械手
1.旋转关节;2.移动关节;3.转动关节;4.移动关节;5.转动关节;6.吸盘
在SolidWorks中建立三维模型,图4四臂吸盘机械臂模型。每个吸盘机械臂有五个自由度,前两个关节(转动关节序号1和移动关节序号2)属于联动机构,根据被抓取零件的尺寸快速调整机构的空间位置,其中转动关节1为四个吸盘机械臂的共同关节,移动关节2为两两吸盘对称移动自由度,后三个自由度(序号3、4、5)属于独立的自由度用于调整不规则零件被吸持位置也称定位点的位置。伺服电机驱动双摇杆机构带动转动关节序号5工作,能使末端吸盘达到前后水平位置,极大的提高了吸盘工作空间。序号6为真空吸盘机构。图3为吸盘机械臂的局部放大图,其中吸盘机械臂采用模块化设计[9,10]可以根据零件的形状和尺寸设计,当超过吸盘机械手自身调节范围时,切换成其他尺寸的吸盘机械手。此种结构变换属于局部改变,主要机构模块都保持不变,可以节约制造成本,实现快速切换功能,满足现代化设计需求。另外辅助吸盘机构的主要作用防止大跨度薄板类的零件在搬运过程中不因自身的重量而发生弯曲变形。
2 吸盘机械臂的运动学分析
吸盘机械臂有四个轴对称吸盘小臂组成,只需分析一组机械臂运动学。吸盘机械臂运动学就是建立在各个运动关节和末端执行器(即末端吸盘)的空间位姿之间的关系,为系统的控制提供分析的手段和方法。基于上述结构建立各关节运动参数,其机构简图如图5所示。
11月4日,是美国总统特朗普于5月8日宣布退出“伊核协议”(联合全面行动计划,JCPOA)的180天之后,恢复对伊朗第二批制裁的“大限之日”。不得不承认,美国依然是这个星球的唯一超级霸主,它一“任性”,其他国家或多或少都会遇到麻烦。由此,过去几个月,涉及伊朗石油的利益相关方都在全力调动各方面的资源,努力降低因恢复制裁对本企业本机构带来的战略被动和重大损失。
江苏淮河入海水道工程是国务院批准建设的大型防洪工程,自2003年建成以来,发挥了巨大的防洪减灾效益。笔者到淮河入海水道工程管理处进行社会实践活动期间,实地察看了入海水道工程现场,了解了工程管理的相关情况,查阅了工程巡视检查的有关规定和资料记录。通过实地学习实践,结合有关管理规定对加强淮河入海水道工程巡视检查工作有了较为深刻的认识和体会。
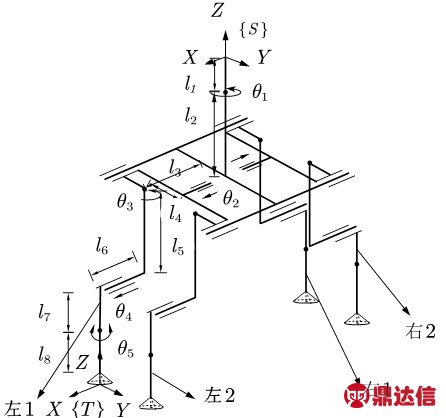
图5 吸盘机械手机构简图
图5中,![]()
![]()
国网水口集团公司电站的机组状态监测系统数据传输采用的是主网络与备网络双通道传输系统,将各电站机组状态监测数据传至集控中心侧二区服务器进行储存,同时将数据向三区服务器转发,三区服务器与水口办公网络连接,终端用户可通过办公网络内任何已安装客户端GMH550-PRAC系统软件对机组状态进行实时监测与分析。
表1 吸盘机械臂的参数表

θ1 θ2 θ3 θ4 θ5 0.2π 0.332mm-3π/4,π/4 0.120mm-π/2,π/2
由于四臂吸盘机器手采用相同的结构布局,故只需要分析单臂的运动学即可。由于图形5机构紧凑,图中只标注左1臂初始位形的的参数。已知S是基础坐标系,T是末端工具坐标系,从基础坐标系开始对各杆件和关节编号,各关节的运动由位于各关节轴线![]() 产生。初始位置工具坐标系与基础坐标系的变换为:
产生。初始位置工具坐标系与基础坐标系的变换为:
在土地整治项目整治后进行无人机低空摄影测量,即拍摄竣工后影像图,并对工程实施前后的航拍影像的对比,可直接真实反映土地整治工程实施的规模,检验施工的数量和质量、工程完成的全面性和实际效果。利用竣工后的影像数据,还能从整体上评价土地整治工程布局的合理性,同时可以从局部查看工程实施的具体情况。改变了以前项目竣工验收在实地只能看局部而不能整体评价的缺点,大大提高了项目竣工验收检查的监督能力和手段。
对于机器人的各个转动关节i有![]()
对于机器人各个移动关节i有![]()
同理其他三只机械手初始位形和同一个惯性坐标系,可以得出吸盘末端点的位姿。
3 工作空间
利用Matlab软件对吸盘机械臂工作空间进行求解。根据蒙特卡罗数值分析法,建立此机械手的工作空间云图。在Matlab环境下,利用rand()函数,产生各个变量在![]() 在定义的区间的随机值,即
在定义的区间的随机值,即![]() 将其带入式(2)x,y,z表达式中,就可以得出单只机械臂的工作空间云图,如图6(a)、6(b)、6(c)、6(d)为左1机械手工作空间云图,其他三只机械手也具有相同的空间工作云图,表示龙门架在机器视觉和位置传感器的引导下到达指定的位置,单只吸盘机械手工作范围。图6(e)为不考虑1θ关节的作用时,四个小臂机械手同时工作的空间云图,该图相对于单只吸盘机械手工作空间云图可以更加直观方便地观察出四只机械手同时工作所能夹取零件尺寸范围,同时也能判断待夹取的零件控制点是否在吸盘机械臂工作范围内,为后续根据零件的大小调节可重构机械手的尺寸给出依据。
将其带入式(2)x,y,z表达式中,就可以得出单只机械臂的工作空间云图,如图6(a)、6(b)、6(c)、6(d)为左1机械手工作空间云图,其他三只机械手也具有相同的空间工作云图,表示龙门架在机器视觉和位置传感器的引导下到达指定的位置,单只吸盘机械手工作范围。图6(e)为不考虑1θ关节的作用时,四个小臂机械手同时工作的空间云图,该图相对于单只吸盘机械手工作空间云图可以更加直观方便地观察出四只机械手同时工作所能夹取零件尺寸范围,同时也能判断待夹取的零件控制点是否在吸盘机械臂工作范围内,为后续根据零件的大小调节可重构机械手的尺寸给出依据。
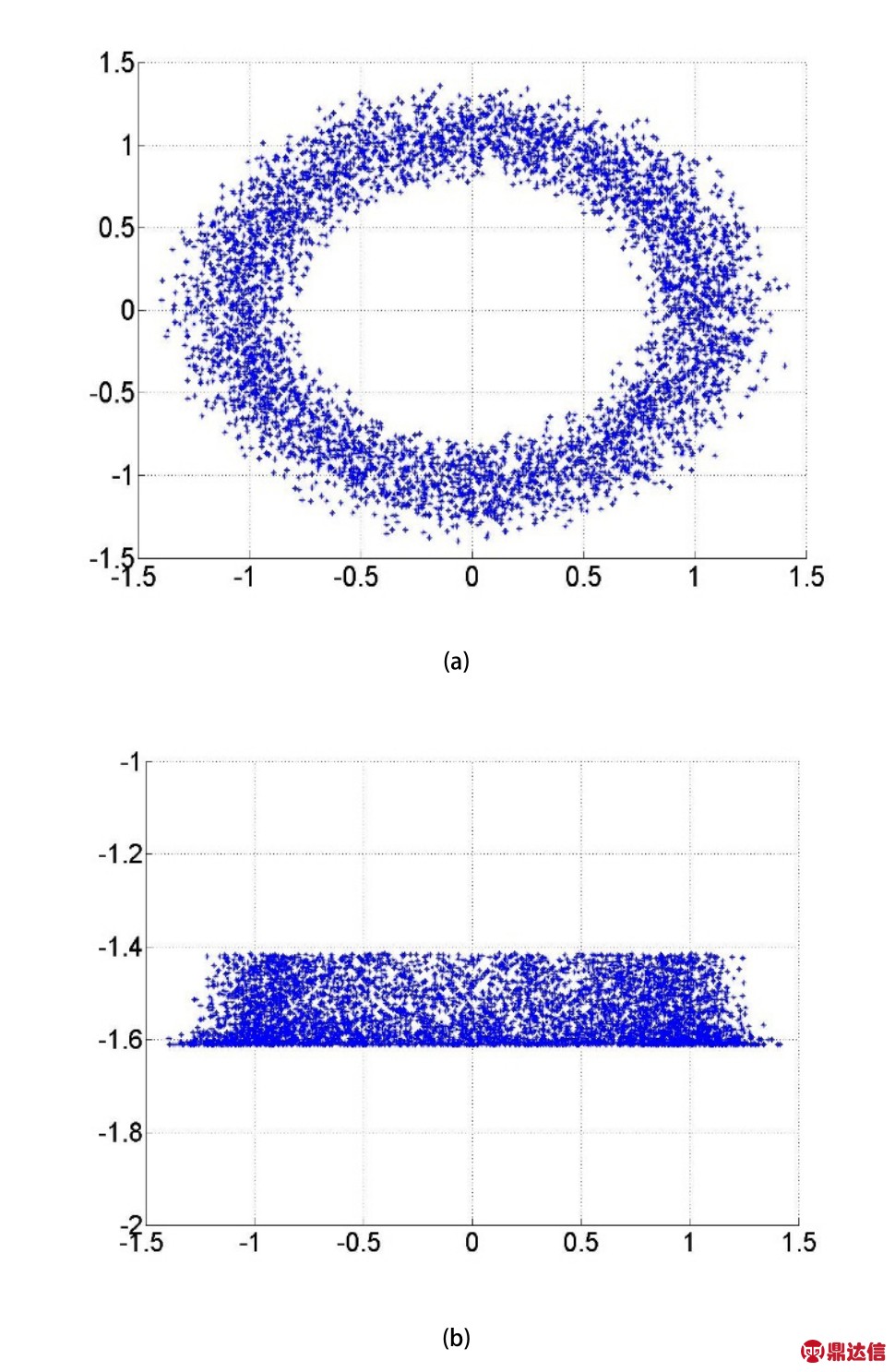
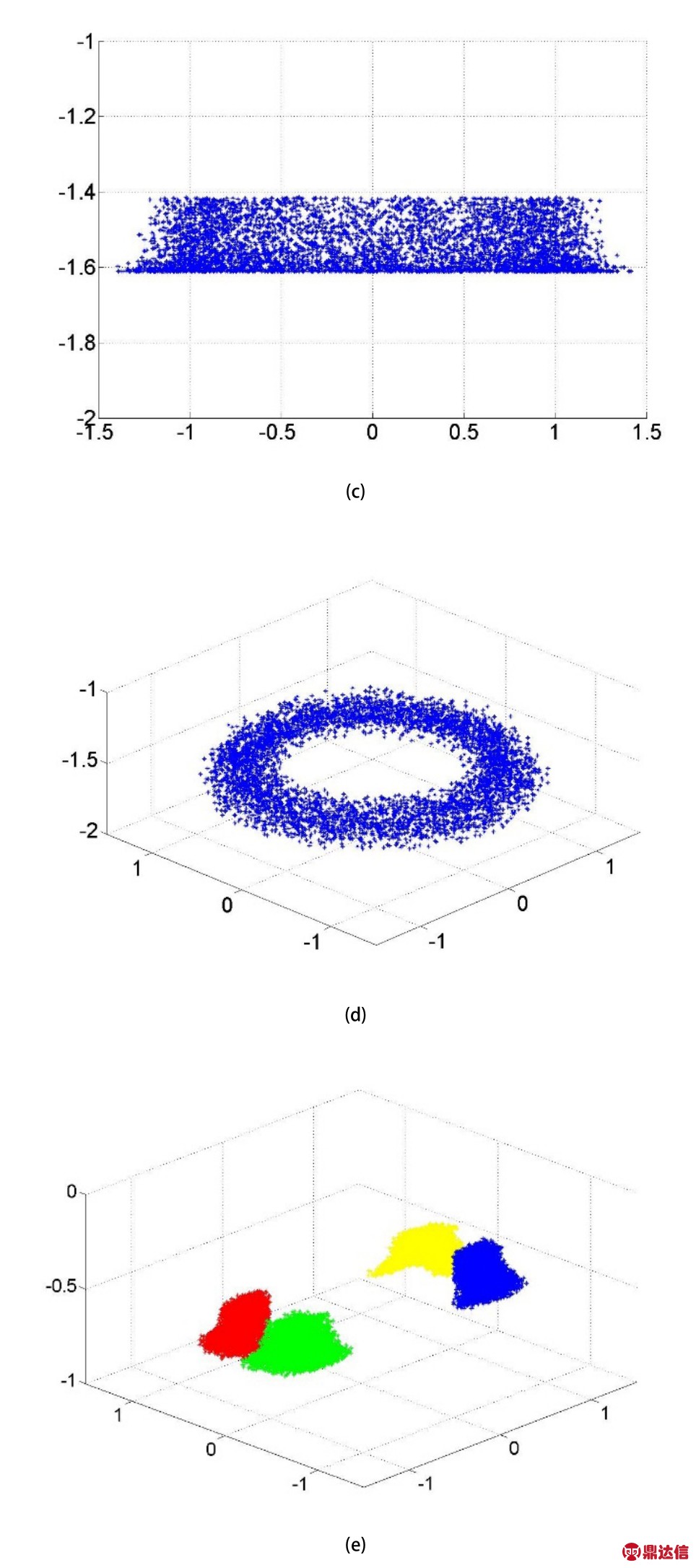
图6 空间工作云图
通过仿真图6(a)可得单臂吸盘机械臂在1θ旋转过程中末端吸盘所能达到的工作间,得出单臂末端点的运动范围内径为1.008m,外径为3.012m的圆环。图6(e)四小臂协同工作吸盘空间云图,要求满足被抓取的零件的几何尺寸至少能落在图中的四个不同颜色的区域内,才能被吸盘抓取。通过对工作空间的分析,为后续在零件上确定被抓取点的研究对在搬运过程中对零件产生的变形具有重要的意义。
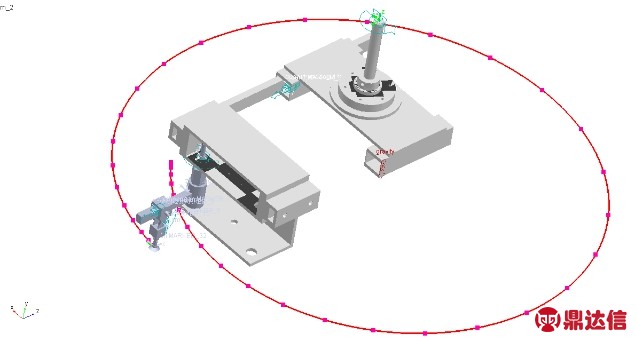
4 虚拟样机的建立
利用ADAMS对吸盘机械手进行虚拟仿真测试,能够快速的查找问题,发现问题,能避免吸盘机械手在制造过程中出现不必要的问题。吸盘机械手由四个小机械手组成,前后左右机构对称,相互配合工作。在导入ADAMS中在不影响结果的前提下在进行适当简化,图7所示为简化流程图。
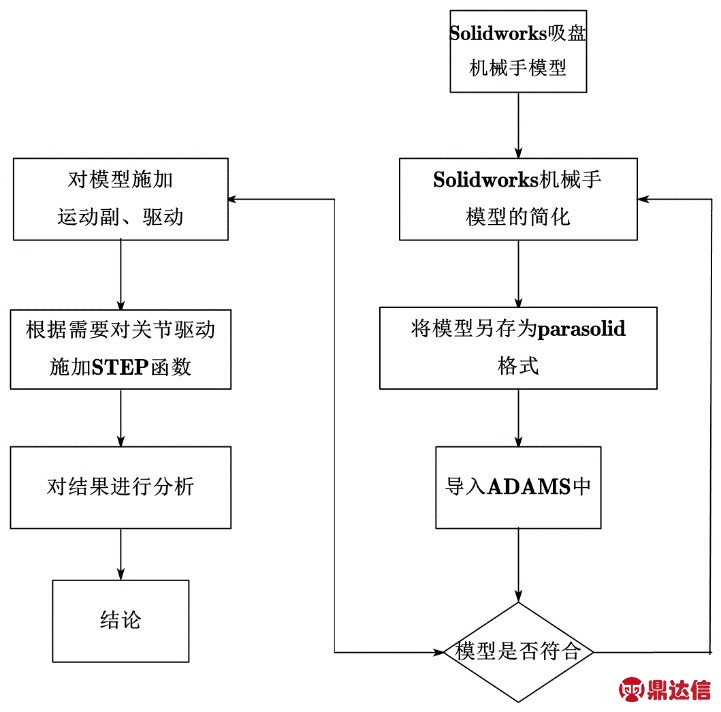
图7 流程图
图8 导入ADAMS中三维模型
将吸盘机械手模型导入ADAMS中,如图8所示,导入后对各个零件进行重新命名,设置相应的材料属性,赋予质量,对吸盘机械手相应的关节施加运动副,然后对每个关节施加相应的驱动函数,完成相应的动作,得出吸盘机械手运动曲线。
由于吸盘机械手是轴对称模型,以其中一个吸盘机械手为分析对象,其他机械臂通过ADAMS布尔操作合成一体,再删减不需要的零件。然后对其分析,根据吸盘机械手的参数和基本设计指数对虚拟样机中一个臂进行仿真可以得出吸盘机械手的运动数据及轨迹曲线。
为了准确、完整反映高等学校的资产和负债以及各项收入和运行成本情况,为了更好地运用权责发生制,《政府会计制度》对会计科目做了重要调整。
在吸盘机械手单条机械手五个关节,根据运动方式,输入STEP驱动函数,如下:
关节1:STEP(time,1,0d,5,360d)+STEP(time,15,0d,20,-360d)
关节2:STEP(time,1,0,5,332)+ STEP(time,15,0,20,-332)
关节3:STEP(time,1,0d,5,145d)+STEP(time,20,0d,25,-145d)
但是,开发商与企业在参与城市更新时会面临很多约束,其中既有技术与市场等硬性约束条件,也有政策等软性约束条件。硬性约束条件可以通过自身的不断发展与完善来满足。但软性约束条件往往会成其参与城市更新时滋生腐败的突破口。即企业为获得参与城市更新的通行证,获得有利于自身的发展条件,往往会与城市政府达成同盟,影响城市更新的决策。
关节4:STEP(time,1,0,5,-120)+STEP(time,15,0,20,120)
关节5:STEP(time,1,0d,5,90d)+STEP(time,15,0d,20,-90d)
在单吸盘机械手的仿真过程中,对末端吸盘标记mark点进行轨迹绘制从而得出单吸盘机械手在空间内理论工作区域如图9所示。
人员费用:设备配备一名医师和一名技师,2016年人员工资约为20万元,奖金按照收入的5%测算,以后每年工资年增涨幅度为15%。
图9 单只吸盘机械手理论工作区域
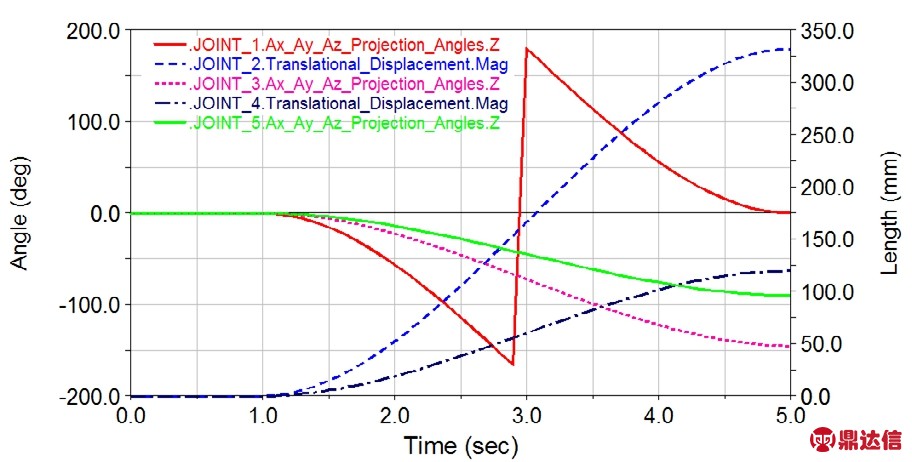
图10 单吸盘机械手每个关节的角度θ曲线
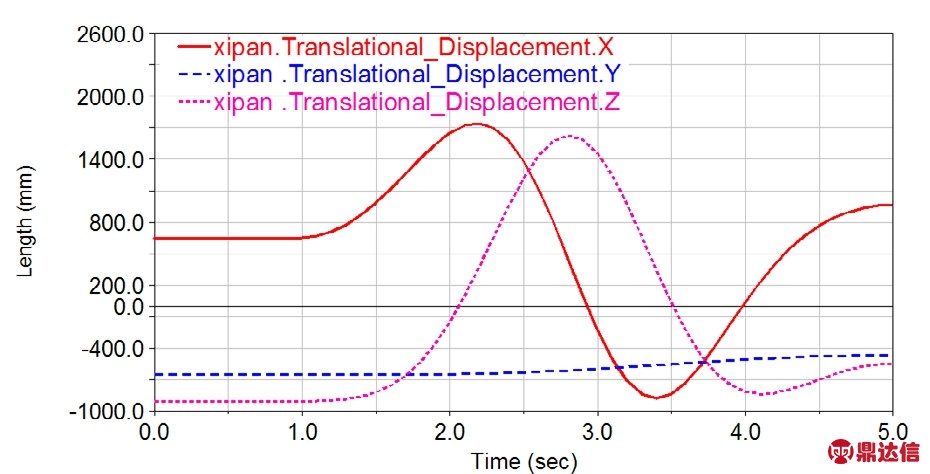
图11 吸盘末端标记点X、Y、Z位置仿真曲线
在仿真完成后,按F8进入ADAMS/POSTPROSS界面对仿真结果进行数据分析,如图11所示为末端吸盘标记点的XYZ三个方向的位置曲线输出测量值,图10为单吸盘机械臂每个关节的角度曲线输出测量值。由图11仿真结果可知在单吸盘机械手旋转360度过程中,若以初始时刻吸盘为0位置,则吸盘能向前最大1.741m,向后最大0.879m,与吸盘机械手在MATLAB仿真中的位形空间尺寸极其吻合。从而验证了建立运动学的正确性。由图10关节角度运动曲线可知,在给定的驱动要求下,单吸盘机械手具有相对稳定的运动形式,符合设计者的要求。
5 结论
以自行设计的吸盘机械手为研究对象,首先以旋量坐标确定各个关节参数,求解运动学正解,然后在MATLAB中编程绘制单只吸盘机械手的工作空间,分析吸盘机械手可达到最大和最小的工作范围。然后在以关节1θ停止转动,分析四只机械手协同工作时吸盘抓取的工作范围。通过ADAMS虚拟样机的仿真,更加直观的描述吸盘机械手的运动参数。通过以上的分析,确定吸盘机械手抓取零件尺寸范围和运动参数,同时也为后续的协调控制和轨迹跟踪做好基础。


