
摘 要:针对重型并联机构构型不足的问题,提出了一种适合重载加工的2自由度龙门式驱动冗余并联机构。首先,在运动学分析的基础上,利用虚功原理建立了系统的动力学模型。其次,以动力学模型中驱动力的范数最小为目标,对驱动力进行优化,并给出了一种加速度性能评价指标。最后,基于驱动力优化方法以及加速性能评价指标分析比较了在相同运动条件下该冗余重型并联机构与其对应的非冗余并联机构的动力学性能。本文研究结果对其他重型关联机构的构型设计以及加速度评价具有重要的参考价值。
关键词:自动控制技术;并联机构;虚功原理;动力学;驱动冗余;性能评价
0 引 言
并联机构具有刚度高、惯量小、动态特性好等优点,在高速、大承载场合,与串联机构相比具有明显优势。因此,并联机构得到了广泛的关注,出现了各种多自由度和少自由度并联机构构型,一些并联机构成功应用于飞行模拟器、数控机床、喷涂机器人等领域[1,2]。特别是Delta并联机器人、Z3并联机构主轴头的成功应用[3],增强了研究人员对并联机构工业应用的信心。然而,适用于重型加工的并联机构构型相对较少,限制了并联机构的广泛应用和推广[4]。
动力学是并联机构的重要性能,特别是并联机构应用于数控机床领域,对其动态特性要求更高[5]。由于并联机构的闭环特性,并联机构动力学具有高度耦合性、强烈非线性等特点,动力学模型复杂。对于驱动冗余并联机构,其动力学方程是静不定的,对于给定的控制输入,存在着多种可能的驱动力/力矩向量,必须协调好各关节的驱动力输入,否则会导致较大的内力破坏机构。这就涉及到对驱动冗余并联机构动力学的优化问题。此外,为了衡量并联机构动力学性能的优劣,需要适当的评价方法和指标。目前,并联机构的动力学性能评价指标主要是沿用传统的串联机构动力学性能评价指标,还缺少驱动冗余并联机构的动力学性能评价方法及指标[6,7]。
本文首先提出一种适合重型加工的龙门式并联机构构型,然后建立其运动学模型。基于运动学模型,利用虚功原理建立系统的动力学模型,并对该机构的驱动力进行优化。进一步,基于动力学模型,给出一种适合非冗余并联机构和冗余并联机构的动力学性能评价指标。最后,通过仿真比较了冗余和非冗余并联机构的动力学性能。
1 运动学性能分析
1.1 机构描述

图1 重型冗余并联机构三维图
Fig.1 3D of a heavy-duty planar parallel mechanism with actuation redundancy
图1为具有2个平动自由度的重型并联机构,该并联机构具有龙门架式结构,安装在左、右两个立柱上的滑块分别由伺服电机通过滚珠丝杠驱动;左边滑块通过两个定长连杆与动平台连接,右边滑块通过一个定长连杆与动平台连接。两个滑块沿固定在立柱上的导轨可以上下运动,通过定长连杆带动动平台实现2个自由度的平动,此外一个带主动驱动的伸缩支链也连接到动平台,从而构成驱动冗余并联机构。
由于伸缩支链可以对动平台施加竖直方向的力,因此添加伸缩支链可以使机构具有刚度高、负载能力强等优点。另外,当左边两个定长连杆与右边定长连杆共线时机构处于奇异位形,添加伸缩支链可以避免这类奇异位形。联合该冗余并联机构、两自由度铣头和沿垂直XY平面移动的工作台,可以组成一台五轴混联机床,特别适合于重载加工等领域应用。
1.2 运动学及加速度
图2是重型驱动冗余并联机构的运动学模型,在机座上两个立柱的中心点O处建立全局坐标系O-XY,在动平台的中心处建立动坐标系O′-X′Y′。为了运动学和动力学建模方便,在Di处分别建立坐标系Di-xy和Di-x′y′,其中x和y轴分别与X和Y轴平行,x′轴沿着连杆DiCi的杆长方向。
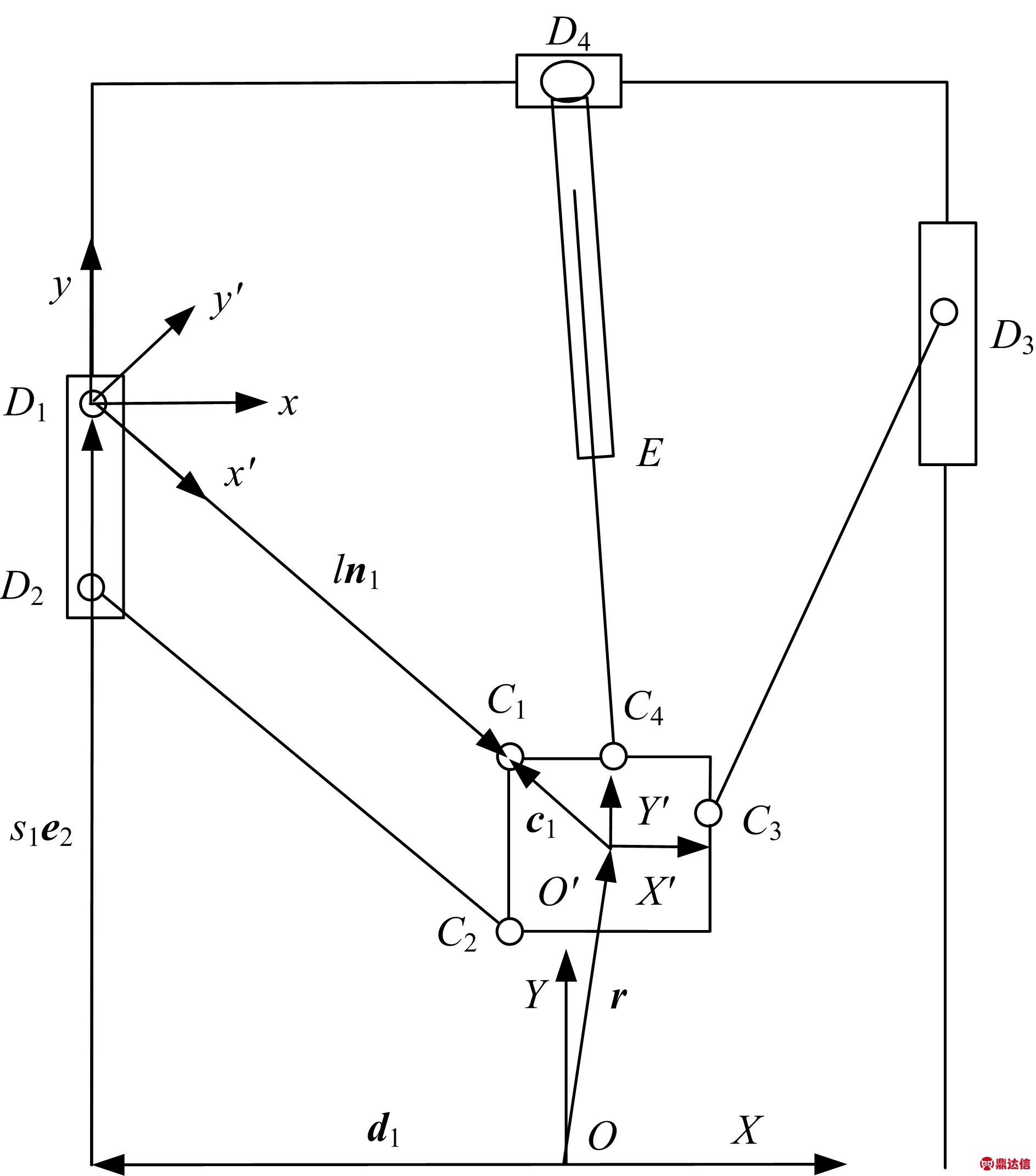
图2 冗余并联机床结构分析图
Fig.2 Structure diagram of heavy-duty planar parallel mechanism with actuation redundancy
定义点O′在全局坐标系O-XY中的位置矢量为r=[x y]T,则连杆CiDi的限制方程可以表示为:

(1)
式中:ci表示点Ci在动坐标系O′-X′Y′中的位置矢量,ci=[cix ciy]T;di表示从点O到立柱沿水平方向的位置矢量;si表示Di点在O-XY坐标系中的Y坐标值;e2=[0 1]T;l和ni分别表示连杆CiDi的长度和单位矢量。
伸缩连杆C4D4的限制方程可以表示为:
(2)
式中:c4表示点C4在动坐标系O′-X′Y′中的位置矢量,c4=[c4x c4y]T;d4表示从点O到D4的位置矢量;l41和l42分别表示伸缩连杆C4D4的上半部分和下半部分的长度;n4表示伸缩连杆C4D4的单位矢量。
对方程(1)两边同时取范数,可以得到:

(3)
相应地可以得到连杆CiDi的单位矢量为:
(4)
式中:nix和niy分别表示ni的x和y方向分量。
基于方程(2),伸缩连杆C4D4的长度和单位矢量可以表示为:
(5)
(6)
假设![]() 表示连杆CiDi质心相对于坐标系Di-x′y′的位置矢量,则连杆CiDi质心相对于坐标系Di-xy的位置矢量可以表示为:
表示连杆CiDi质心相对于坐标系Di-x′y′的位置矢量,则连杆CiDi质心相对于坐标系Di-xy的位置矢量可以表示为:

(7)
式中:rcxi和rcyi表示rci在x和y方向分量;R表示从坐标系Di-x′y′到坐标系Di-xy的旋转变换矩阵。
连杆CiDi质心在全局坐标系O-XY中的位置矢量为:
(8)
伸缩连杆C4D4的上部分D4E和下部分EC4的质心位置可以表示为:
(9)
(10)
1.3 加速度分析
对方程(1)二次求导,可以得到:
(11)
式中:ωi和εi分别表示连杆CiDi的角速度和角加速度。
基于方程(11),可以得到滑块的加速度和连杆CiDi的角加速度为:
(12)
(13)
对方程(8)二次求导,可以得到连杆CiDi质心的加速度为:
(14)
式中![]() gi和
gi和![]() ci分别表示连杆CiDi质心在坐标系O-XY和Di-XY中的加速度。
ci分别表示连杆CiDi质心在坐标系O-XY和Di-XY中的加速度。
对方程(9)和(10)二次求导,可以得到伸缩连杆C4D4的上部分D4E和下部分EC4质心的加速度分别为:
(15)


(16)
式中:ω4和ε4分别表示伸缩连杆C4D4的角速度和角加速度。
2 动力学建模
2.1 杆件受力分析
本文利用虚功原理建立重型并联机构的动力学模型。利用虚功原理建模,需要求运动构件的偏速度和偏角速度矩阵。偏速度和偏角速度矩阵反映了机构各个杆件的速度、角速度和末端执行器速度、角速度的映射关系,可以表示为:
(17)
(18)
式中:Hi和Gi分别表示偏速度和偏角速度矩阵。根据式(17)(18)就可以分别求出各个运动部件相对于其关键点的偏速度矩阵和偏角速度矩阵。
在求出了运动构件的偏角度矩阵和相对于关键点的偏速度矩阵之后,需要推导各个运动构件相对于关键点的惯性力和惯性力矩。这里利用牛顿-欧拉方程求解各个运动构件惯性力和惯性力矩。规定mi(i=1,2,3)为支链CiDi质量;m41为伸缩支链C4D4上半部分B4C的质量;m42为伸缩支链C4D4下半部分CA4的质量;ms1为左滑块质量;ms2为右滑块质量;M为动平台质量;Ii(i=1,2,3)为支链CiDi关于Di点的转动惯量;I41为伸缩支链C4D4上半部分D4E关于D4点的转动惯量;I42为伸缩支链C4D4下半部分EC4关于C4点的转动惯量;,g=[0 -9.81]T为重力加速度。作用在支链CiDi上的力及对Di点的力矩为:
(19)
作用在伸缩支链C4D4上的合力和对D4点的力矩可以表示为:
(20)
作用在滑块上的合力和对Di点的力矩为:

(21)
作用在动平台上的合力和对其质心的力矩为:
(22)
2.2 驱动力优化
联合式(17)~(22),由虚功原理得到:
(23)
式中:J表示雅可比矩阵;H=[τ1 τ2 τ3]T,其中τ1、τ2、τ3分别表示左滑块、右滑块和伸缩支链C4D4的驱动力;![]() ,其中H4i为伸缩支链C4D4相对于D4点的偏速度矩阵,G4i为伸缩支链C4D4的偏角速度矩阵,Hsi和Gsi为滑块的偏速度矩阵和偏角速度矩阵,HR和GR为动平台的偏速度矩阵和偏角速度矩阵。
,其中H4i为伸缩支链C4D4相对于D4点的偏速度矩阵,G4i为伸缩支链C4D4的偏角速度矩阵,Hsi和Gsi为滑块的偏速度矩阵和偏角速度矩阵,HR和GR为动平台的偏速度矩阵和偏角速度矩阵。
从方程(23)可以列出2个与τ1、τ2、τ3有关的独立方程,但有3个未知数,因此需要对驱动力进行优化。以驱动力为优化对象,每个伺服电机提供的驱动力的平方之和为优化目标,即优化过程中最小化![]() 。在所有满足方程(23)的解空间中,范数最小的解为:
。在所有满足方程(23)的解空间中,范数最小的解为:
(24)
归一化处理后,可以得到:
(25)
式中:M(r)为惯性矩阵;![]() )为离心力和科氏力矢量;G(r)为重力矢量。
)为离心力和科氏力矢量;G(r)为重力矢量。
2.3 加速度评价指标
动力学性能是评价并联机构加减速特性的重要指标,在动力学方程中影响驱动力和加减速特性的因素有惯量因素、速度项因素、重力项因素,其中与加速度项有关的惯量因素项起主导作用。为了更直接地比较机构的加减速特性,省略式中的速度项、重力项和外力项,对式(25)化简可得到:
(26)
式中:N为惯性矩阵M(r)的M-P广义逆。
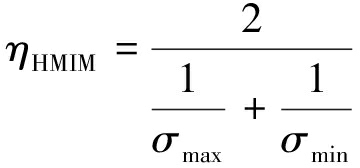
目前,还缺少并联机构加速度性能评价指标。文献[8]利用最大奇异值和最小奇异值的调和平均数HMIM作为动力学评价指标。其优势在于,对于调和平均数只有在最大奇异值σmax和最小奇异值σmin都满足比较大时HMIM的值才会较大,保证机构具有良好的各项同性的同时实现较好的加速性能。因此这里利用HMIM指标评价机构加速性能,该指标为:
(27)
式中:σmax和σmin分别为矩阵N的最大和最小奇异值。
3 仿真验证
3.1 冗余和非冗余并联机构驱动力比较
这里假设该并联机构沿半径为1.5 m的圆形轨迹运动。并联机构应用在数控机床和机器人等领域,工作过程中通常处于匀速运动、加速运动和减速运动3种工作状态。因此,运动过程也包括加速、匀速和减速3个阶段。另外,为了比较冗余并联机构和非冗余并联机构的动力学性能,仿真过程中,去掉伸缩支链C4D4,得到对应的非冗余并联机构。让该非冗余并联机构也沿相同的圆形轨迹运动,分别计算其驱动力和加速性能。
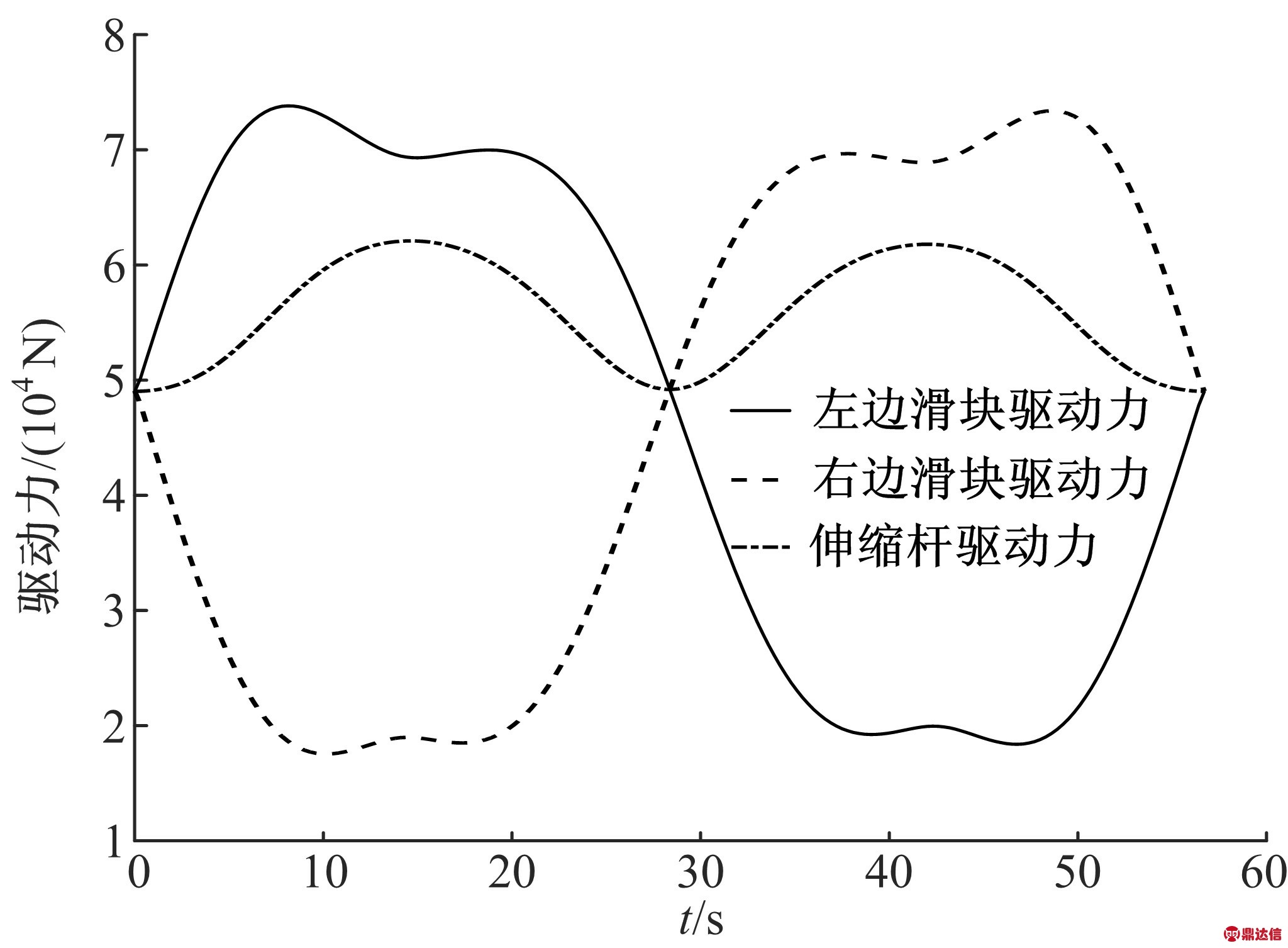
图3 冗余并联机构驱动力
Fig.3 Driving force of redundant parallel mechanism
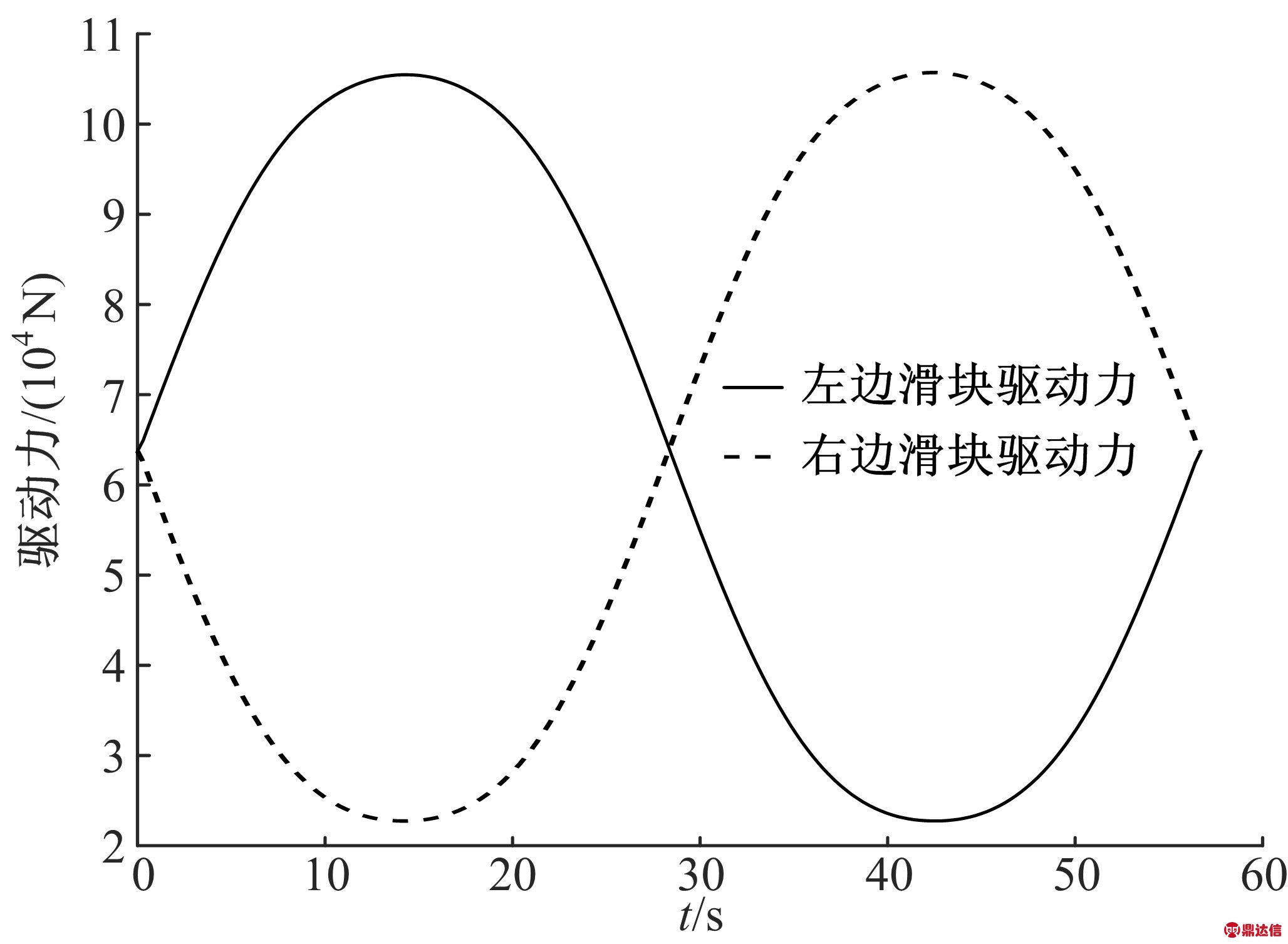
图4 非冗余并联机构驱动力
Fig.4 Driving force of non-redundant parallel mechanism
图3和图4给出了重型冗余并联机构和其对应的非冗余并联机构在仿真过程中的驱动力变化。可以看出在相同运动条件下非冗余并联机构最大驱动力明显高于冗余机构的最大驱动力,非冗余并联机构的最小驱动力和冗余并联机构的最小驱动力差别不大。因此,通过增加伸缩支链C4D4,可使并联机构的驱动力降低,并且可以减小运动过程中驱动力波动,从而提高机构的动态特性。
3.2 冗余和非冗余并联机构加速度比较
基于式(27)给出的加速度评价指标,分别对冗余并联机构和其对应的非冗余并联机构在相同工作空间内的加速度性能进行仿真。图5和图6给出了并联机构沿半径为1.5 m的圆形轨迹运动时的速度和加速度,可以看出在整个运动过程中X、Y方向的速度和加速度变化平缓。从图6中可以看出,冗余并联机构和非冗余并联机构的加速度性能随着Y轴的变化较小。同时,冗余并联机构的加速性能优于其对应的非冗余并联机构,从而说明添加伸缩支链C4D4可以明显提升该并联机构的加速性能。
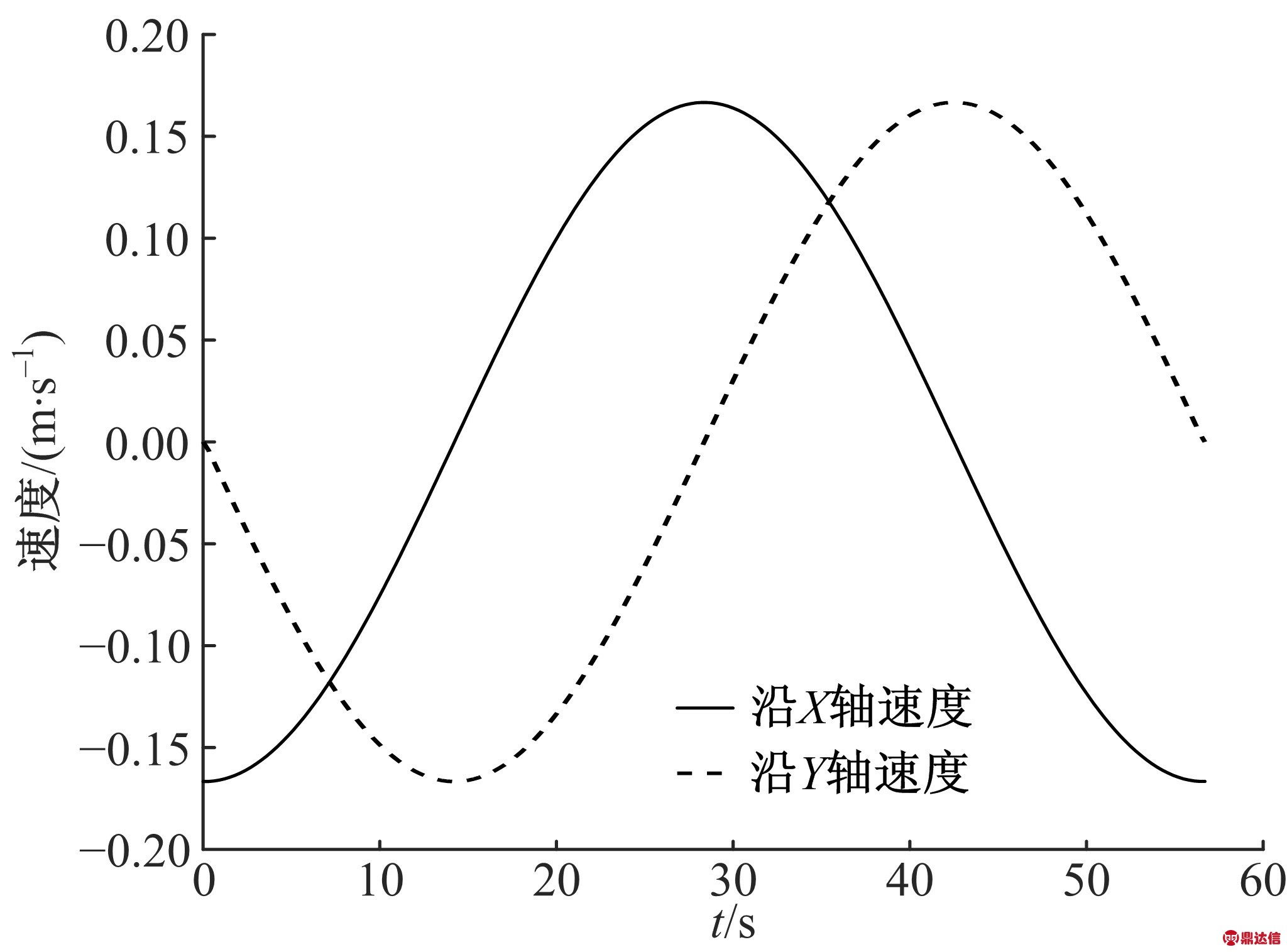
图5 动平台质心沿X、Y轴速度曲线
Fig.5 Velocity curves of moving platform in X and Y axis
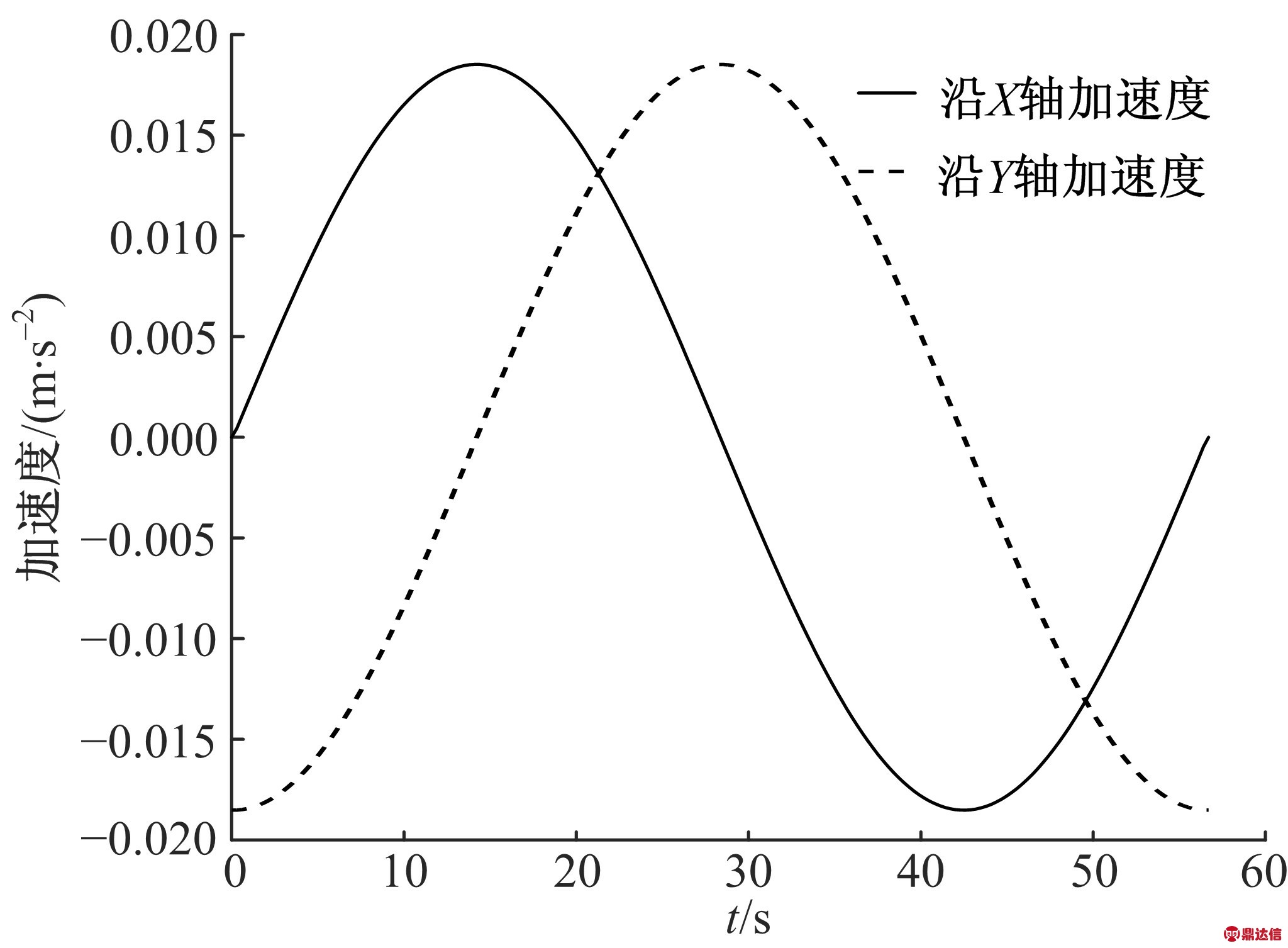
图6 动平台质心沿X、Y轴加速度曲线
Fig.6 Acceleration curves of moving platform in X and Y axis
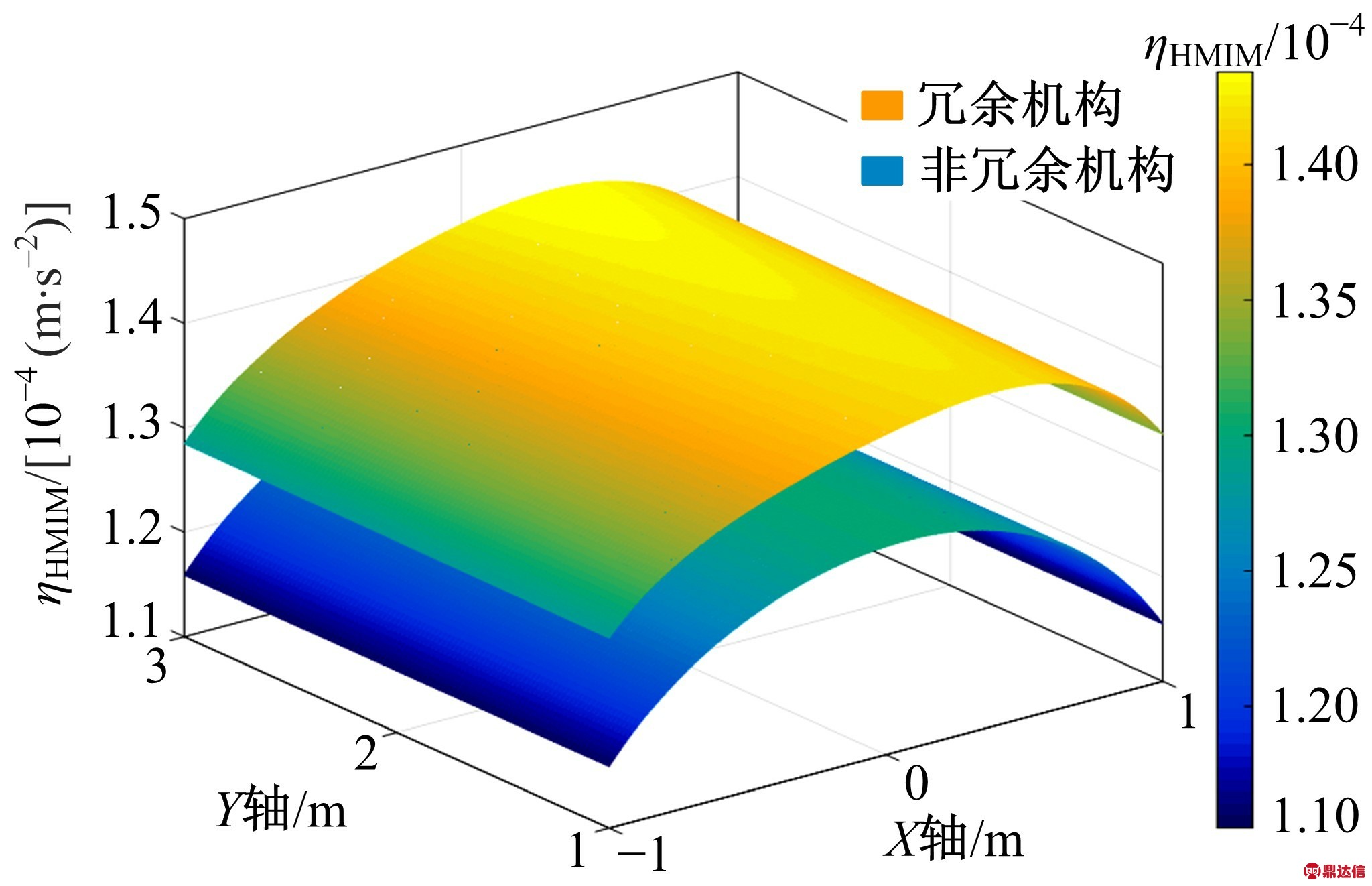
图7 冗余与非冗余机构的动力学性能对比
Fig.7 Dynamic performances of redundant parallel mechanism and non-redundant parallel mechanism
图7为冗余与非冗余机构的动力学性能对比,可以看出该冗余并联机构的加速性能关于Y轴近似对称地,并且在Y轴上的数值最大,说明该并联机构在任务空间的中央具有最好的加速性能。考虑到在实际应用中,该并联机构的任务空间也是在Y轴附近,说明该并联机构在其任务空间中具有较高的工作效率,为重载加工提供了一种非常实用的机构构型。
4 结束语
本文提出了一种适合重载加工的2自由度龙门式驱动冗余并联机构,该机构采用冗余驱动方式,具有高刚度、低惯量等特点。利用虚功原理建立了系统的动力学模型,并构造了并联机构加速性能评价指标。通过仿真研究表明,在相同运动条件下,冗余并联机构的驱动力小于对应的非冗余并联机构的驱动力,从而降低了运动过程中驱动力的波动,提高了动态特性。此外,该冗余重型并联机构的加速性能优于其对应的非冗余并联机构的加速能力,具有较高的工作效率。本文研究结果对其他重型并联机构的构型设计以及加速度评价具有重要的参考价值。


