
引言
通常为了拾起和搬运一件工件都需要与搬运设备直接接触,这种接触式搬运设备与工件表面就容易造成表面划伤和静电。例如在半导体加工过程中,晶片需要被频繁地装载与卸载,应用接触式搬运就容易导致次品增多[1]。为了避免搬运设备和工件的直接接触,磁、静电、近场和气动等多种非接触式搬运方法被提出,气动悬浮方法运用气流对工件的提升力,具有几乎不产生热量,可以搬运任何材料的工件[2],不需要控制回路而达到稳定状态和易于维护等优点。现有的气动非接触搬运方法包括基于伯努利原理的伯努利悬 浮法和漩涡悬浮法。伯努利悬浮法空气消耗量较大,并导致供应管道中的能量损失[2],旋涡悬浮法的空气消耗量则小得多[3],因此旋涡悬浮法的非接触式搬运方式应用前景较好。
气动悬浮吸盘是一种采用旋涡悬浮方法的非接触式搬运设备,目前对吸盘研究的重点是研究吸盘的内部旋涡流场。黎鑫[3]对旋流悬浮的机理及稳定悬浮区域进行了探讨,利用微元离心力模型建立了旋流吸盘的工件表面静压力与气隙之间的解析模型,利用该压力分布与工件受力面积的乘积获得了提升力模型,然其只能描述流体的切向速度,而忽略了由于重力引起的轴向速度以及径向速度。另外根据大量实验结果证明,实际的漩涡形成应该分为两个区域,一个是涡旋外缘的有旋运动区,一个是内部涡核的似固体无旋运动区,但该模型无法解释内部涡核似固体无旋运动区的运动规律,因此也就无法正确描述静态旋流悬浮的特性。为此本文采用三种基本旋涡模型对旋流非接触吸盘进行一维数值建模,而后通过对吸盘采用PIV(Particle Image Velocimetry)实验得到吸盘内部流场的速度分布,通过以三种吸盘模型对比三种数学模型为目标函数,应用最小二乘拟合方法对PIV实验数据进行拟合来验证和比较模型的准确性,最后辨识出能够准确描绘吸盘内部流场的一维数学模型,以期为今后吸盘的研究提供理论依据。
1 吸盘的旋涡悬浮法原理和结构
气动悬浮吸盘能够在吸盘下表面形成真空。和飓风类似,吸盘的真空是由旋涡的旋转气流引起的,旋涡的产生原理如图1所示。沿与吸盘(Vortex cup)杯面相切的喷嘴(Nozzle)吹入压缩空气,空气沿着杯壁(Circular Cylinder)下行形成负压,使得工件(Workpiece)上下表面形成压差产生对工件的吸附力,而同时压缩空气从吸盘与工件的间隙流出,对工件产生排斥力,避免了工件与吸盘裙板的接触,最后吸附力和排斥力达到动态平衡,气体从喷嘴持续流出,工件就会持续地悬浮在和吸盘距离几百个微米的地方,气流从间隙中持续流向大气,进而形成非接触式吸附。
产业创新系统是一个由知识和技术、行为者和网络、制度等模块组成的创新体系。其中企业是产业创新系统的核心要素,是创新的主体,企业生产、应用新技术、新知识的能力直接决定了产业创新效益的高低。有效的配套措施能起到让高技术企业增加研发投入的作用。为此,应鼓励国有及国有控股高技术企业进行创新,将创新速度作为企业主要领导人考核的重要依据,发挥创新的示范作用;缩短新产品的审批流程,使企业的创新产品能够尽快走向市场,获得先入优势,从而增加创新激励效应;实行更严格的商标管理,保护企业的知识产权和品牌。
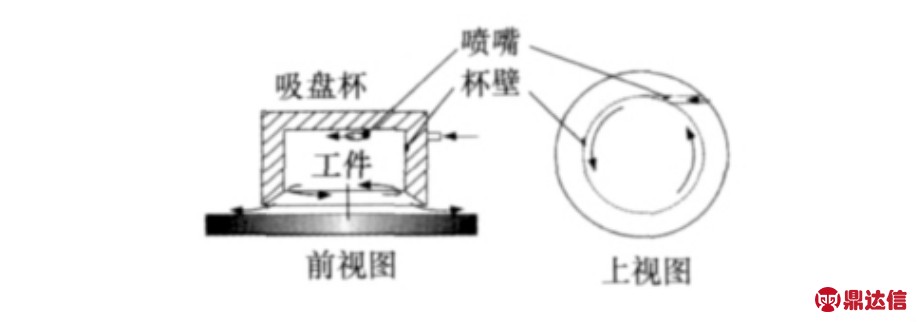
图1 吸盘旋涡吸附原理
本文中采用的吸盘结构参照了文献[4]中提出的非接触旋流吸盘结构,依照实验需要设计了的吸盘的尺寸,吸盘的结构和尺寸如图2和表1所示。
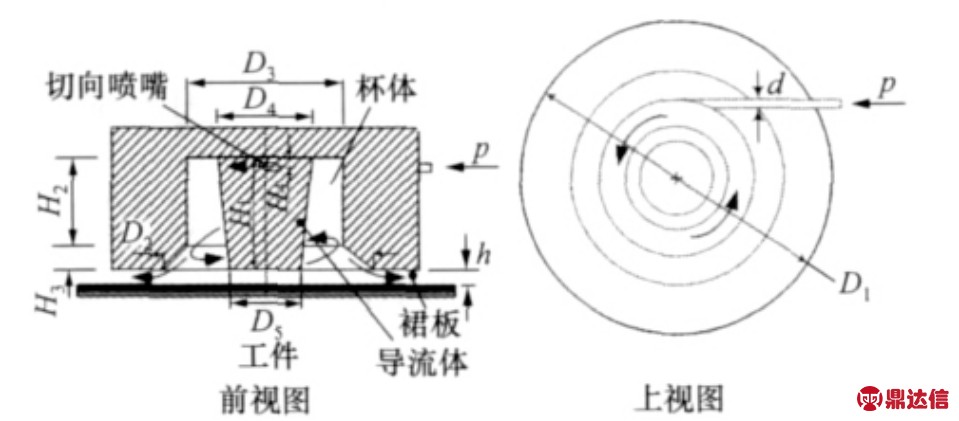
图2 吸盘结构
表1 吸盘尺寸 mm

D1 D2 D3 D4 D5 H1 H2 H3 H4 d 140 90 80 40 30 30 25 5 1.5 2
如图3所示吸盘结构包括杯体、切向喷嘴、杯体中心位置的导流体和杯体外围的裙板。蓝色箭头表示气体旋转流动方向。
在机电施工中,往往因为管线排布不合理和施工协调工作的失误,造成管线拆改损失,利用BIM技术进行机电管线综合,不仅可以提高施工工作效率,增加可视性,还能有效地减少因管线碰撞导致的拆改和原材料的浪费。BIM工作站通过对BIM模型进行机电与结构的碰撞检查,查找碰撞点,并进行深化设计,进而直观地发现管线综合中的问题,及时调整局部管线走向,减少施工中不必要的返工,提高工程安装成功率。
2 吸盘流场的一维数学建模
吸盘内部的气体流动明显是涡旋运动[5],涡旋流动主要分为无旋旋涡模型、有旋旋涡模型和复合涡模型。
无旋旋涡模型:
式中:Vθ为切向速度(mm/s);r为径向位置(mm);K为常数(mm2/s)。
有旋旋涡模型:
复合模型:

式中:Γ为涡量(s-1);r0为涡核半径(mm)。
对口支援 2011年,为服务国家区域发展战略,国家研究制订中西部高等教育振兴计划,加大对口支援西部高校力度,有94所高校对口支援新疆等18个省(区、市)和新疆生产建设兵团的67所高校;扩大支援中西部地区招生协作计划规模,北京等15个省(市)面向中西部八省(区)扩大招生15万人,使八省(区)高考录取率比2009年提高九个百分点。
这种复合模型又被称为兰金复合涡(Rankine Vortex Model)[5],兰金涡包括 r≤r0 区域的强制涡和 r≥r0区域的自由势涡,但是兰金涡本质上是一个无粘旋涡模型,并没有真正涉及到粘性,只是巧妙地运用了无粘刚性旋涡也是N-S方程的解这个事实。兰金涡模型在涡核过渡区不是光滑涡核,进一步修正可以得到奥森涡模型(Oseen Vortex):
大数据网贷平台利用政策上的漏洞,打政策的“擦边球”,面临着极大的监管政策风险。未来,相关部门可能更多地从放贷金额、服务群体、融资比例等方面来规范小贷公司的业务范围。在融资比例上,相关文件只是规定从银行等金融机构的融资比例不得超过50%,而对其他渠道融入资金比例并没有明确,随着行业不断发展,相关监管政策也会规定得更加明确、更加细致。这些监管政策的改变,都可能给网贷平台发展带来一定的风险。
式中:Γ0为零时刻的涡量(s-1);v为气体运动粘度系 数(mm2/s)。
Oseen涡和Rankine涡类似,在任何一时刻,当![]() <<1时有近似解
<<1时有近似解![]() ,即 Rankine 涡核区的速度分布,相当于角速度
,即 Rankine 涡核区的速度分布,相当于角速度![]() 旋转的刚体,而在
旋转的刚体,而在![]() >>1时,则有
>>1时,则有![]() ,这是无粘势涡的分布规律。可取涡核半径
,这是无粘势涡的分布规律。可取涡核半径![]() 为涡核半径,则 Oseen 涡可以表示成:
为涡核半径,则 Oseen 涡可以表示成:
Taylor涡是通过Oseen涡速度模型对时间的微商得到的,其速度模型为:
北方农区要抓住晴好天气,加快秋收扫尾工作,已收获地区要做好晾晒和储藏工作,确保颗粒归仓。北方冬麦区已播地区注意查苗补种,土壤墒情偏差地区要积极造墒播种、适当加大播量;黄淮南部、江淮、江汉陆续进入播种期,应及时做好整地备播工作,并需密切关注墒情雨情,趁墒或造墒播种冬小麦。
式中:M是流体的动量矩(kg·mm/s),等于常数[5]。
对补偿前后仿真结果进行反应热力学和动力学参数求解,求取结果如表4所示。不同浓度下DTBP的化学反应机理是不变的,对比表1可以看出,浓度40%和60% DTBP未进行动态补偿时,动力学参数求取结果出现严重偏差,补偿后结果偏差较小。结合图4可知,样品热电偶动态特性和炉体加热系统动态响应的快慢对动力学分析的准确性有重要影响。
图3给出了Vθ/Vmax随着无量纲距离![]() 的变化,其中 Vθ/Vmax[5] 为:
的变化,其中 Vθ/Vmax[5] 为:
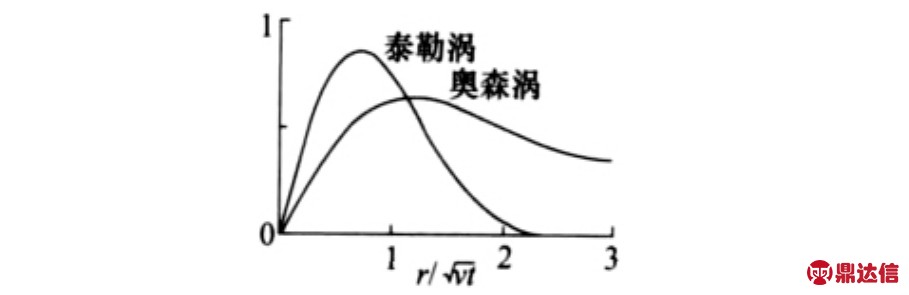
图3 Taylor涡和Oseen涡速度分布比较
由式(6)可知当![]() ,但当
,但当![]() 涡的速度衰减来的更快。同样令涡核半径
涡的速度衰减来的更快。同样令涡核半径![]() 涡速度模型可以表示为:
涡速度模型可以表示为:
根据吸盘的结构特点可知,在气膜间隙位置导流体下面的气流流动是由导流体外部的气体流动带动,由于气膜间隙很小(≤2.5 mm),粘性作用主导速度可能会很小或者呈现无规律运动,因此我们将导流体下端的流体运动用一个恒定值来近似模拟,导流体外部的气体流动则可以用上文中的三种模型来模拟,故以Rankine涡模型为例,气膜间隙位置的速度模型可以
表示为:
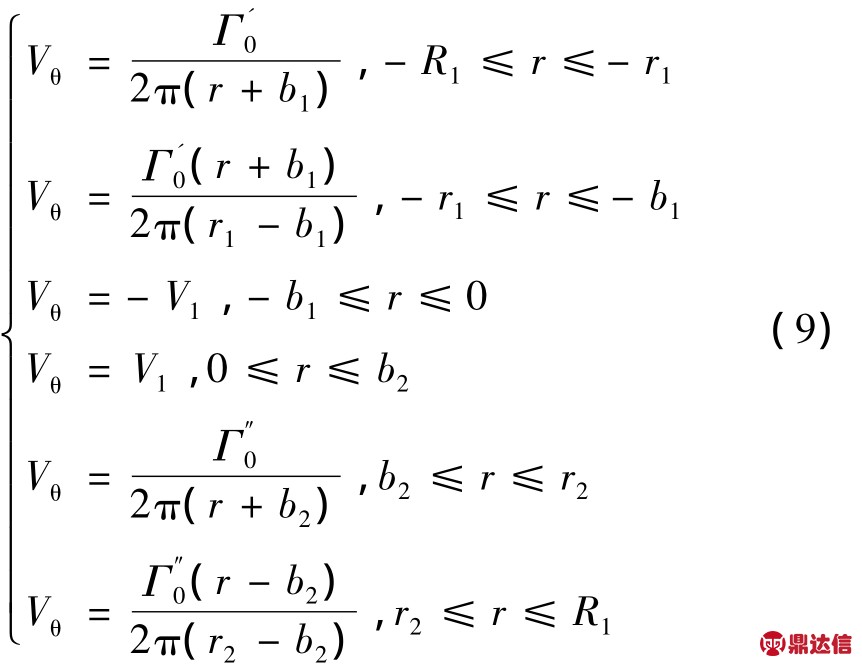
式中:Γ'0、Γ″0分别为吸盘左右两侧流体的初始时刻涡量(s-1),为常数;R1为吸盘的半径(mm);r1、r2分别为吸盘左、右侧的涡核半径(mm);b1、b2分别为左侧和右侧吸盘受导流体主导流体和强制涡的分界点(mm),默认为导流体的直径R5;V1为导流体下部流体的流动速度(mm/s)。
类似Rankine涡模型,基于Oseen涡的气膜位置速度模型也可以表示为:
我是一个70后,从走进教师这个行业、担任班主任工作开始,负面情绪就始终存在。生活中的压力,工作中的烦恼,总是容易让人忧郁、焦躁、不安、易怒。既然不可避免地会与负面情绪相遇,与其逃避躲闪,不如正确面对、合理解决。听读与我随行,帮我减压、给我灵感,让我做回自己情绪的主人。
同理,基于Taylor涡的气膜位置速度模型可以表示为:
杯体内部由于存在导流体,故取V1=0且将R1换成R3,即可以得到杯体内部的基于三种旋涡模型的数学模型。以上建立的数学模型只是基于旋涡理论和吸盘基本结构得出的理论模型,他们是否能够适用于实际吸盘的内部流场描述需要进一步的验证。
3 吸盘的PIV实验
本文采用了PIV技术来获取吸盘内部流程的速度分布,PIV技术是一种瞬态流场测量技术,它突破了LDV(Laser Doppler Velocimetry)传统单点测量的限制,可瞬时无接触测量流场中一个截面上的二维速度分布。
为了对旋流吸盘内部流场进行测速,搭建了如图4所示的试验台,整个实验系统包括二部分:供气系统和测量系统。供气系统包括气源、手动阀、减压阀、流量计、粒子发生器和旋流吸盘。测量系统包括PIV系统和数据处理系统。压缩机产生(供气量365 m3/h)压缩气体通过减压阀把进气压力设置在5 kPa供给旋流吸盘。示踪粒子被放置在气罐里,当打开气源示踪粒子随着气流进入到吸盘中去。采用石英砂作为示踪粒子,粒子密度是1.58×103kg/m3;反射率为1.547,直径为10 μm。激光束通过光路和片光源被转化成片光照射进吸盘被测流场中。粒子图像被CCD相机拍摄并且传送给计算机进行分析处理。
图4 实验系统示意图
如图5所示,试验中测量了A-O-B切面上的五个位置在0.5 mm、0.8 mm、1.5 mm、2.0 mm 和 2.5 mm五个不同气膜间隙下的流场速度分布,其中杯体中测量了如图5和表2所示的四个位置,而气膜间隙部分测量了气膜间隙中央的一个位置。
4 三种吸盘模型的验证与比较
为了验证和比较三种建立的吸盘模型的适用性和准确性。本文先以建立的数学模型为目标函数应用最小二乘拟合方法来拟合PIV实验数据,再通过比较三种模型的拟合精度来衡量三种模型的适用性能。
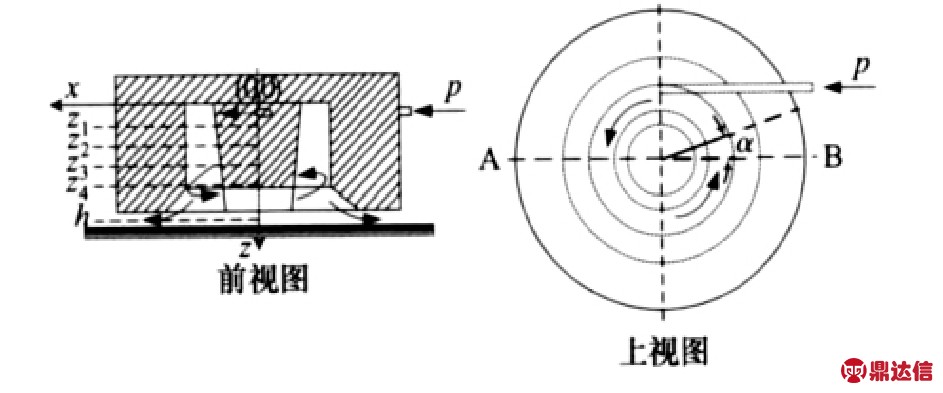
图5 轴向不同测量位置
表2 吸盘杯体内部测量位置
Z1/H1 Z2/H1 Z3/H1 Z4/H1 0.31 0.47 0.63 0.78
这里我们用到了MATLAB优化工具箱(Optimizaition Tool),优化工具箱提供了应用广泛的算法集合,用于求解常规和大型的优化问题,这些算法可以求解带约束、无约束的以及离散的优化问题。
术后肠麻痹是延缓手术患者出院的一个重要因素,减少术后肠麻痹也是ERAS的一个重要目标。中胸段硬膜外镇痛比常规静脉阿片类药镇痛对预防术后肠麻痹更有效,尤其是开腹手术[44]。应该避免术中及术后的过度液体负荷,减少对胃肠功能恢复的影响。腹腔镜微创手术与开腹手术相比,能使肠功能的恢复更快,更早恢复口服进食。咀嚼口香糖及使用爱维莫潘等药物,都有可能对促进术后肠麻痹的恢复有效[43-45]。
以三种模型为目标函数分别对不同气膜间隙下的杯体内部和气膜间隙位置PIV数据的拟合结果如图6~图11所示。
根据非线性回归理论[7],可以采用决定系数R2和剩余标准差S来比较和衡量衡量回归数学模型的适用性,相关指数R2是实验值和回归估计值^y之间相关系数的平方,它反应了回归平方和占总平方和的比重,其值在0~1之间,R2越接近1说明拟合效果越好,剩余标准差S即残差的标准差,用于放映回归方程的估计精度,其值越小表明模型拟合精度越高。R2和定义为

其中,y为实验数据 为实验数据平均值
为实验数据平均值 为回归数学模型的值。表3和表4列出了不同气膜间隙下气膜位置和杯体内部不同位置处三种旋涡模型的回归指标。
为回归数学模型的值。表3和表4列出了不同气膜间隙下气膜位置和杯体内部不同位置处三种旋涡模型的回归指标。
一是对饮用水水源地有效保护。发布了《张家港市饮用水源地保护管理办法》《张家港市集中式饮用水源地突发环境安全事件预警和应急预案》,划分饮用水水源地保护区,一级保护区建设隔离装置和视频监视系统并组织日常巡查,一干河备用水源地实施河道长效管理,开展水量水质在线监测并发布公报,实施生态补偿等。二是建设备用水源地扩容工程。在一干河南段新开挖沙洲湖,配套新建了一干河备用水源地市政30万t备用取水口,应急供水能力将达到8天以上。三是组织饮用水水源地达标建设。2013年12月通过了省水利厅、住建厅、环保厅的联合验收。
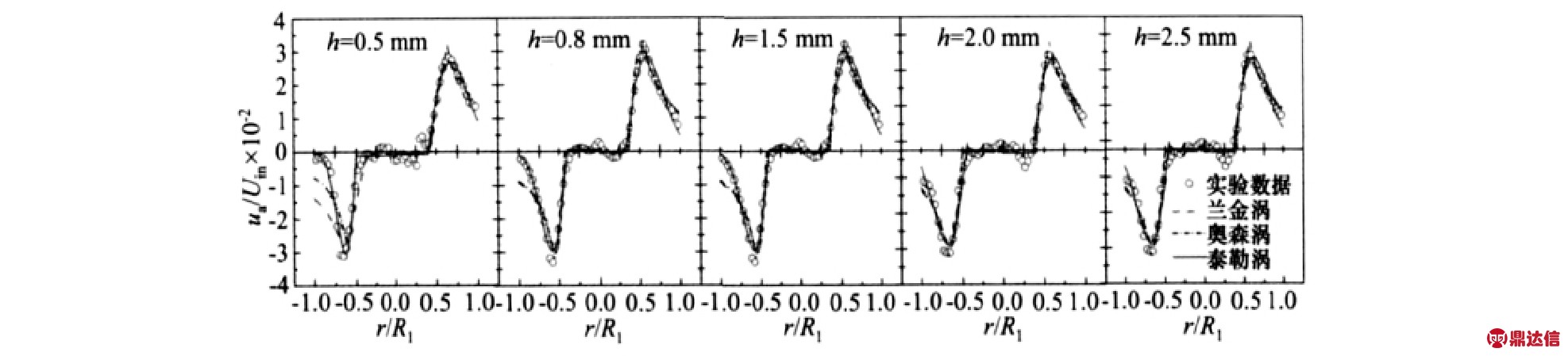
图6 气膜位置的模型拟合结果比较
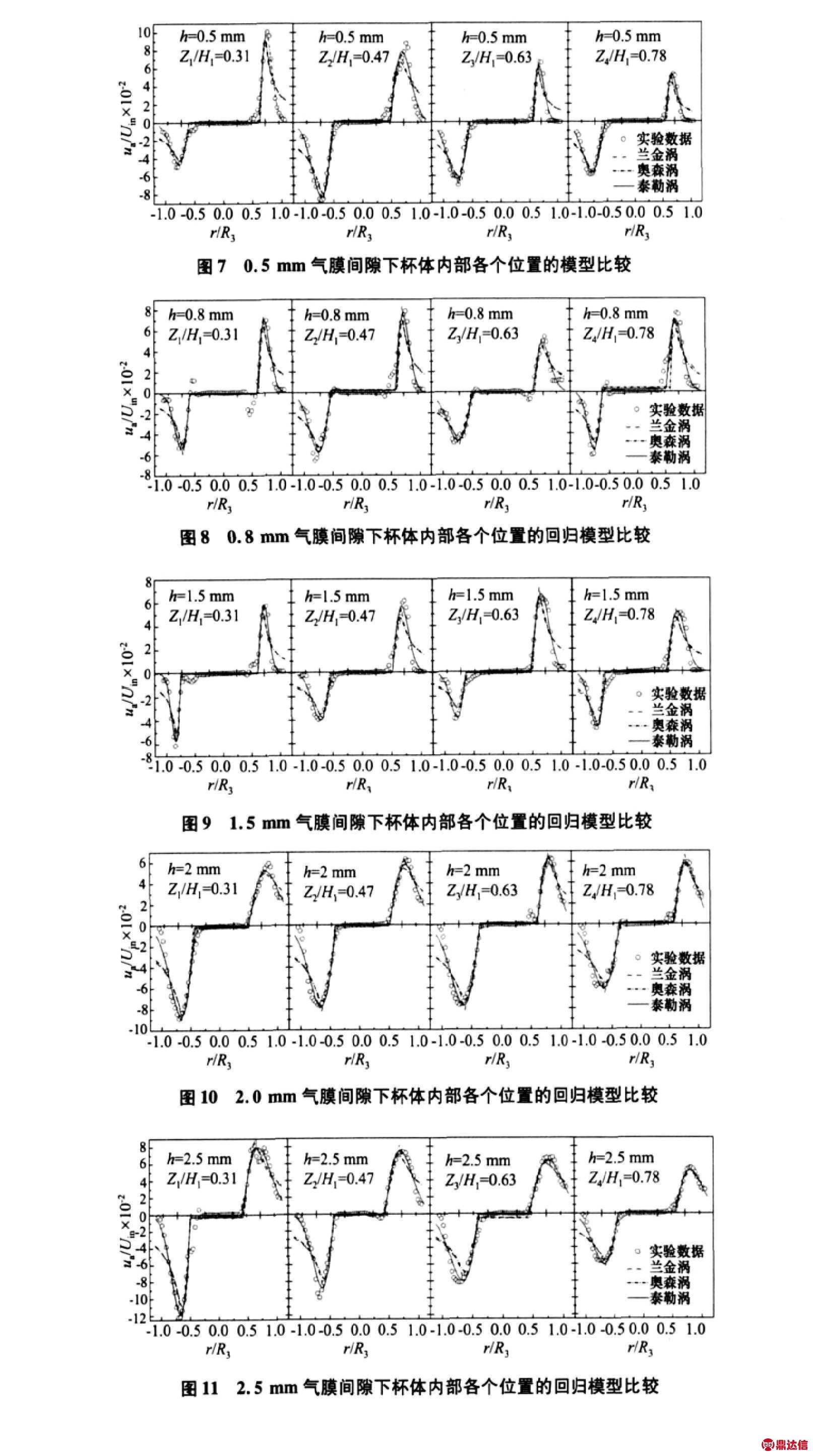
表3 三种涡模型对气膜位置流场的拟合效果比较

h=0.5 mm h=0.8 mm h=1.5 mm h=2 mm h =2.5 mm R2 S R2 S R2 S R2 S R2S兰金涡模型0.855 708 0.972 338 0.98 292 0.98 261 0.99 158奥森涡模型0.934 480 0.965 375 0.981 284 0.98 271 0.99 181泰勒涡模型0.978 278 0.986 237 0.987 236 0.98 267 0.99 178
表4 三种涡模型对杯体内部流场的拟合效果比较
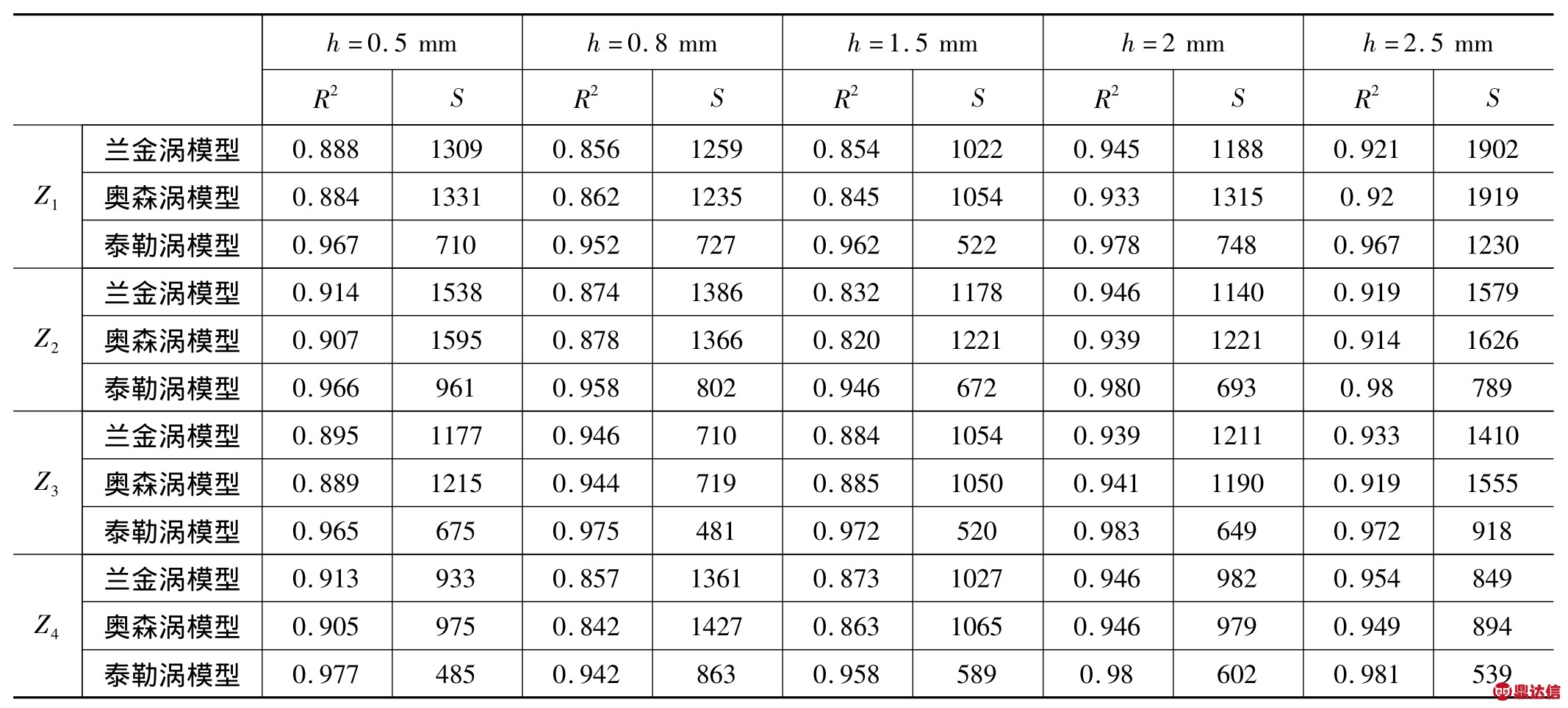
=2.5 mm R2 S R2 S R2 S R2 S R2 h=0.5 mm h=0.8 mm h=1.5 mm h=2 mm h S兰金涡模型 0.888 1309 0.856 1259 0.854 1022 0.945 1188 0.9 Z1 21 1902奥森涡模型 0.884 1331 0.862 1235 0.845 1054 0.933 1315 0.92 1919泰勒涡模型 0.967 710 0.952 727 0.962 522 0.978 748 0.967 1230兰金涡模型 0.914 1538 0.874 1386 0.832 1178 0.946 1140 0.9 Z2 19 1579奥森涡模型 0.907 1595 0.878 1366 0.820 1221 0.939 1221 0.914 1626泰勒涡模型0.966 961 0.958 802 0.946 672 0.980 693 0.98 789兰金涡模型 0.895 1177 0.946 710 0.884 1054 0.939 1211 0.93 Z3 3 1410奥森涡模型 0.889 1215 0.944 719 0.885 1050 0.941 1190 0.919 1555泰勒涡模型 0.965 675 0.975 481 0.972 520 0.983 649 0.972 918兰金涡模型 0.913 933 0.857 1361 0.873 1027 0.946 982 0.954 Z4 849奥森涡模型 0.905 975 0.842 1427 0.863 1065 0.946 979 0.949 894泰勒涡模型0.977 485 0.942 863 0.958 589 0.98 602 0.981 539
从表3和表4可以看出,除了在气膜间隙在2 mm和2.5 mm下的气膜位置两个特例外,基于Taylor涡模型的吸盘流场模型明显较基于Rankine涡和Oseen涡的模型有更接近于1的决定系数R2和更小的剩余标准差S,而且在上文中的两个特例中三种涡模型回归指标的差异并不大,应此可以肯定推断出吸盘内部流场和气膜位置的流场都可以用基于Taylor涡旋模型的吸盘模型进行准确描述。
5 结论
通过对文献[4]中的吸盘结构和三种典型旋涡模型进行分析,建立了三种描述吸盘一维流场的数学模型。基于PIV技术搭建了吸盘流场分析实验台,获得吸盘内部流场的速度分布,并且通过比较三种数学模型的模拟结果和PIV实验结果验证了基于三种漩涡模型的非接触吸盘的一维模型的准确性,接着以三种模型为目标函数应用最小二乘拟合对实验数据进行拟合。通过对三种旋涡模型的拟合效果比较明显得出,基于Taylor涡模型建立的吸盘流场一维模型是最能够准确描述吸盘内部流场的数学模型。


