
0 引 言
随着机器人技术的发展,以及在实际工程中对大型装备的结构健康监测与壁面攀爬作业的需求,完成清洗 、检 测的 功 能[1-5]。 因 此 研 发 一 款 爬 壁 机 器 人 有 着迫切的现实需求。爬壁原理中最常用的是真空吸附,具体为:通过真空泵等设备对机器人的吸盘和壁面间形成负压,依靠大气压吸附。但真空吸附对表面密封性要求苛刻。为解决此问题,提出了常采用高转速的径流式离心风机产生大气负压的方案,利用大气负压使爬壁移动平台或者爬壁机器人贴紧工作面。大量的专家学者针对 大 气 负 压 原理以及结构设计做了研 究[6-9]。福建工程 学 院的 彭 晋 民 等[10]对负 压 吸 附 的 原 理 及利 用 效 率进行了可靠性与稳定性验证,为负压吸附原理提供了理 论 依 据 。 长 春理 工 大 学 的 张 宝庆 等[11]对 吸 附 腔 形 状及吸附能力的研究,为负压吸附的结构设计提供了理论依据。上述研究中,尚未开展对有缝隙壁面上进行吸附的吸盘结构研究,然而这是实际现场中经常遇到的情况。
针对负压式吸附存在的问题,提出了多网格圆形吸附结构,吸盘外形为四棱柱,实现对流场流线优化的同时,在遇到壁面有缝隙的情况时,只会造成相对应的网格漏气,其余网格的吸附能力不受影响,对整体吸盘负压的影响不大,保持一定的吸附能力。文中对该吸盘进行了流场分析与仿真,证明该吸盘具有实用价值。
凡此种种,尤其从2015年到现在,每一想起诸如此类的事情,莫名惊诧之外,还有巨大的空茫感与不确定性。我知道,这不是所谓的迷信,尤其是我们或可感知的冥冥中的律定与指派,游离与消失,它们所具备的那种类似被神明操纵的玄学意味,常常使得人心生感慨。
1 吸盘模型的建立与风场的仿真
1.1 三维模型的建立
基于流体网格理论,在 PTC Creo 中建立了实例三维模型,其中包括吸盘和叶轮的实体。吸盘为正四棱台形式,内有 4×4 的网格,进气口边长为 45 mm,进气口网格边长 10mm,高 10mm,气流出口边长 15mm,气流出口处的环形密封圈以及薄壁环形挡片均采用一体结构简化,交接处作倒圆角处理。离心叶轮外径 28mm。工作时,吸盘靠近壁面的部分与壁面形成了 1 个高 1 mm、长 4×45 mm 的缝隙,由于难以在仿真软件中实现缝隙对气流造成的能量损失,因此用设定一个较小的进口流量值来进行仿真,如图1~图3 所示。
根据流体模型,把气流作为黏性不可压缩流体处理,并设定吸盘与叶轮表面为无滑移、无渗透,且吸盘和叶轮在和风场耦合的界面上速度压力均相等[8]。根据实际工况,在吸盘出口处建立一个包含叶轮的旋转域,表示与风扇一起旋转的有旋空气,转速与驱动风扇旋转的电动机相同。同时建立一个静止域,用包含吸盘和旋转域的长方体表示,并通过布尔命令挖去旋转域和吸盘结构,旋转域和静止域一起构成了风场。
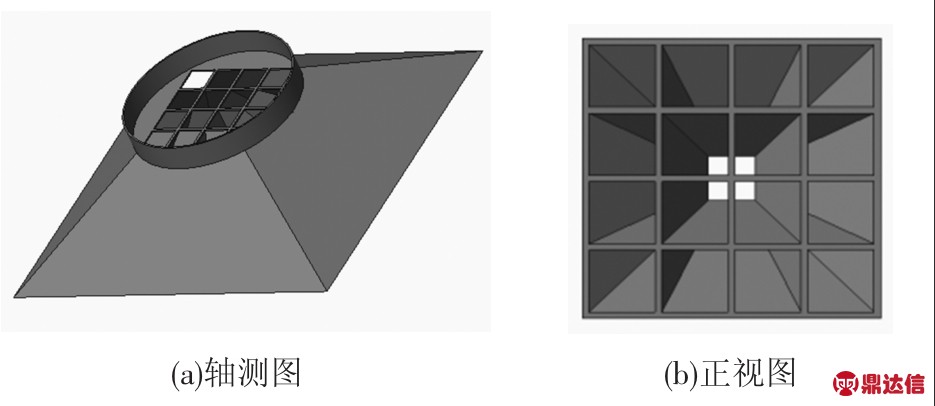
图1 吸盘结构示意图

图2 风扇结构示意图
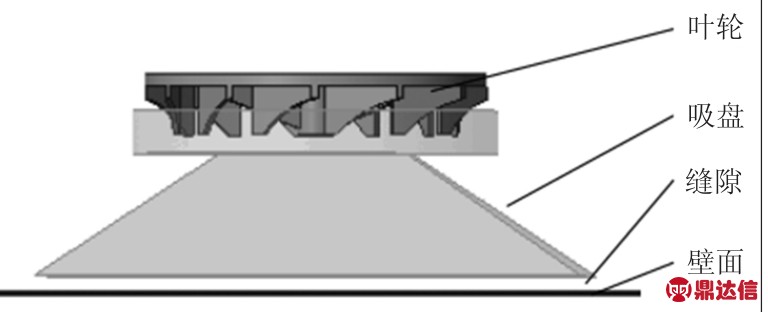
图3 CFD吸附系统三维造型示意图
由于仿真仅涉及流场,因此将吸盘与叶轮的三维模型进行抑制,将建立好的旋转域和静止域导入 Mesh 模块。进行网格划分与边界的声明,通过默认设置,整个流场共产生 64 916 个节点和 313 960 个单元,如图4 所示。
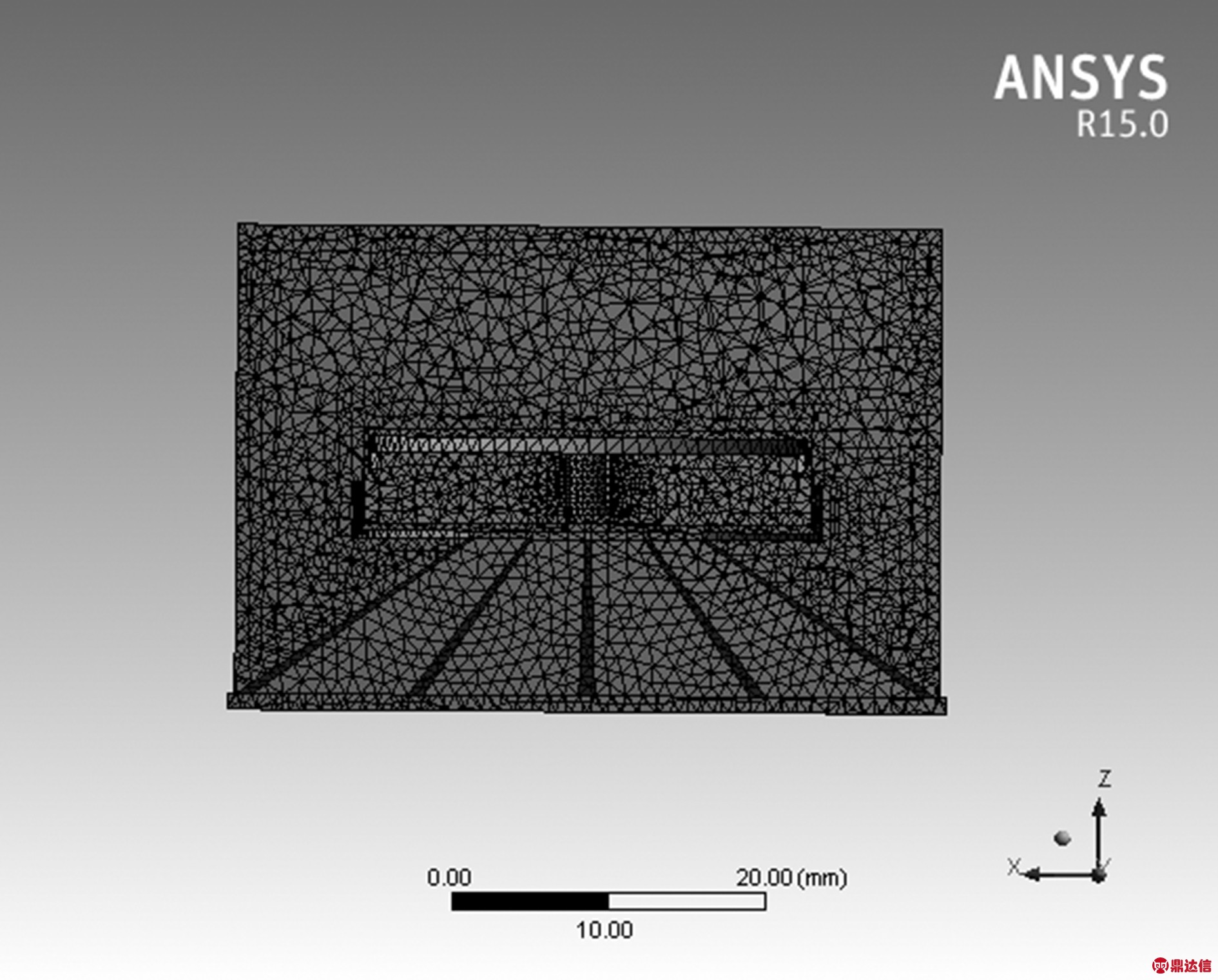
图4 流场网格剖面图
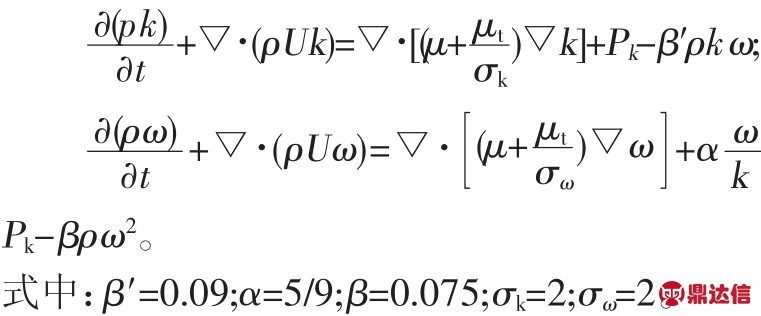
1.2 基本方程
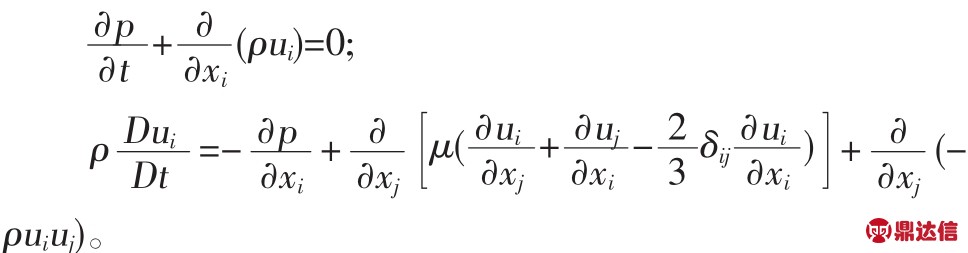
采 用 雷 诺 时 均 N—s 方 程 、 基 于 Shear Stress Transport 模型的 k-ω 方程以及 SIMPLE 算法进行计算[11]。采用公式如下:
在教学的过程中,为了让学生了解行业中的真实工作状况,还根据具体的项目设计了总的学习情境,由此引出该项目,并结合每个子项目和任务,设计了自己的具体情境。[1]通过情境来覆盖、引领、驱动项目的全过程。
三维不可压缩连续方程和动量方程为:
基于 SST 的 k-ω 的模型,该模型是结合了 k-ε 模型和 k-ω 模型的优势,考虑的湍流剪切应力的传输[11],在近壁面采用的是 k-ε 模型,在远离壁面的地方使用的是 kω模型。
标准 k-ε模型的湍动能 k 与湍动能耗散 ε 方程为
企业重组业务作为一项不同于日常经营活动的非常规业务,对提升企业影响力和竞争力具有重要意义。重组业务的复杂性也对企业全体人员提出了更高的要求。企业重组业务会给企业的税务管理工作带来一定风险,因此企业应该加强税收筹划,降低税务风险,促进重组业务有计划有效率地进行。
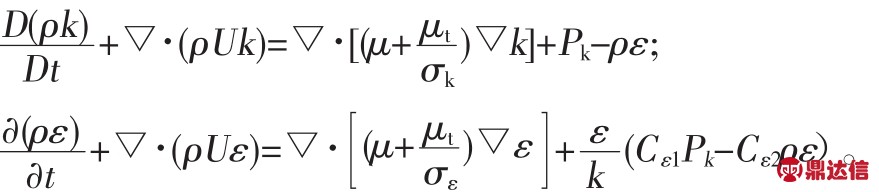
式中:Cε1=1.44;Cε2=1.92;σk=1;σε=1.3。
CFX 的 k-ω 模型是基于维尔科克斯对k-ω 的发展而形成的修正模型[13],该模型的湍动能k和湍频率ω方程为
1.3 仿真参数及边界条件
叶轮转速为 6000 r/min;叶轮叶片数为12;入口流体质量为 0.0645 kg/s;因为只进行内流场的模拟,出口边界条件为开放性出口,相对压力为0 Pa;所有壁面无滑移,近壁区域为标准壁面函数[14]。
从整个人类文明发展史来看,文字是权力的符号,低地水稻国家是文字的中心也是权力的中心,无文字的山地民族游离于这个中心,或被吸纳或被排斥。神话思维给予的启示是这种权力状况是自己造成的缘故,是主动“吃掉”文字的结果,形成一种文化机制解释为何被统治的原因。
1.4 流场行为及特征分析
根据仿真结果得到流体在吸附腔内部的行为和流动的特点,如图5~图7 所示。
总之,培养学生的创造意识的方法是多种多样的,要培养学生的创造思维能力,关键在于老师,而老师必须要更改教学观念,积极设计情境,充分体现学生的主体地位,充分体现教师的引导、组织、参与作用,让学生产生浓厚的学习数学、运用数学的兴趣。在探索、实践、独立思考的基础上,不断启迪学生的智慧,放手让学生自己学习数学,给学生一个自主的空间,让他们乐于会学、善学,只有这样才能真正提高学生的创造思维能力,全面提高学生的数学素质。
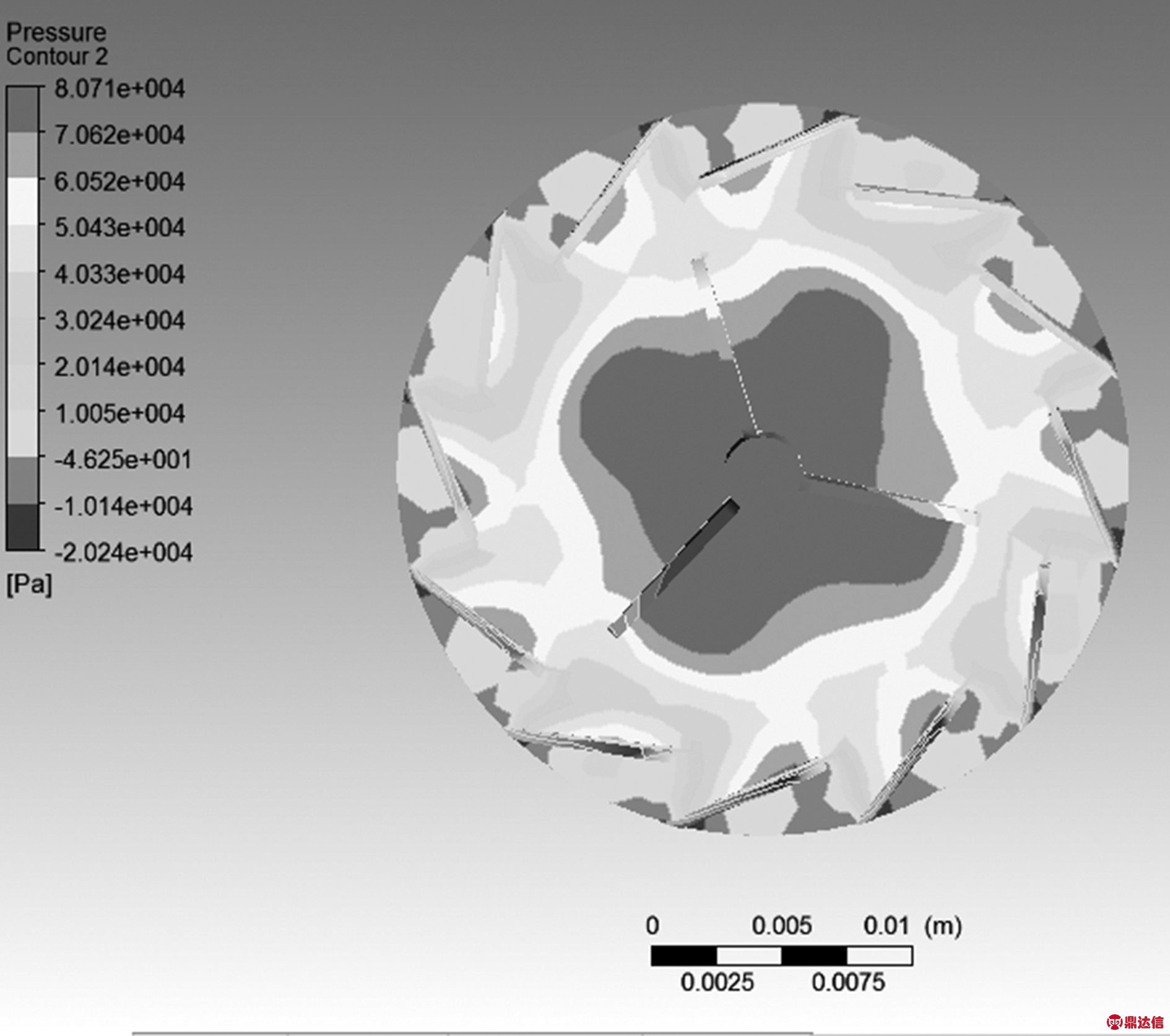
图5 离心叶轮全压分布图
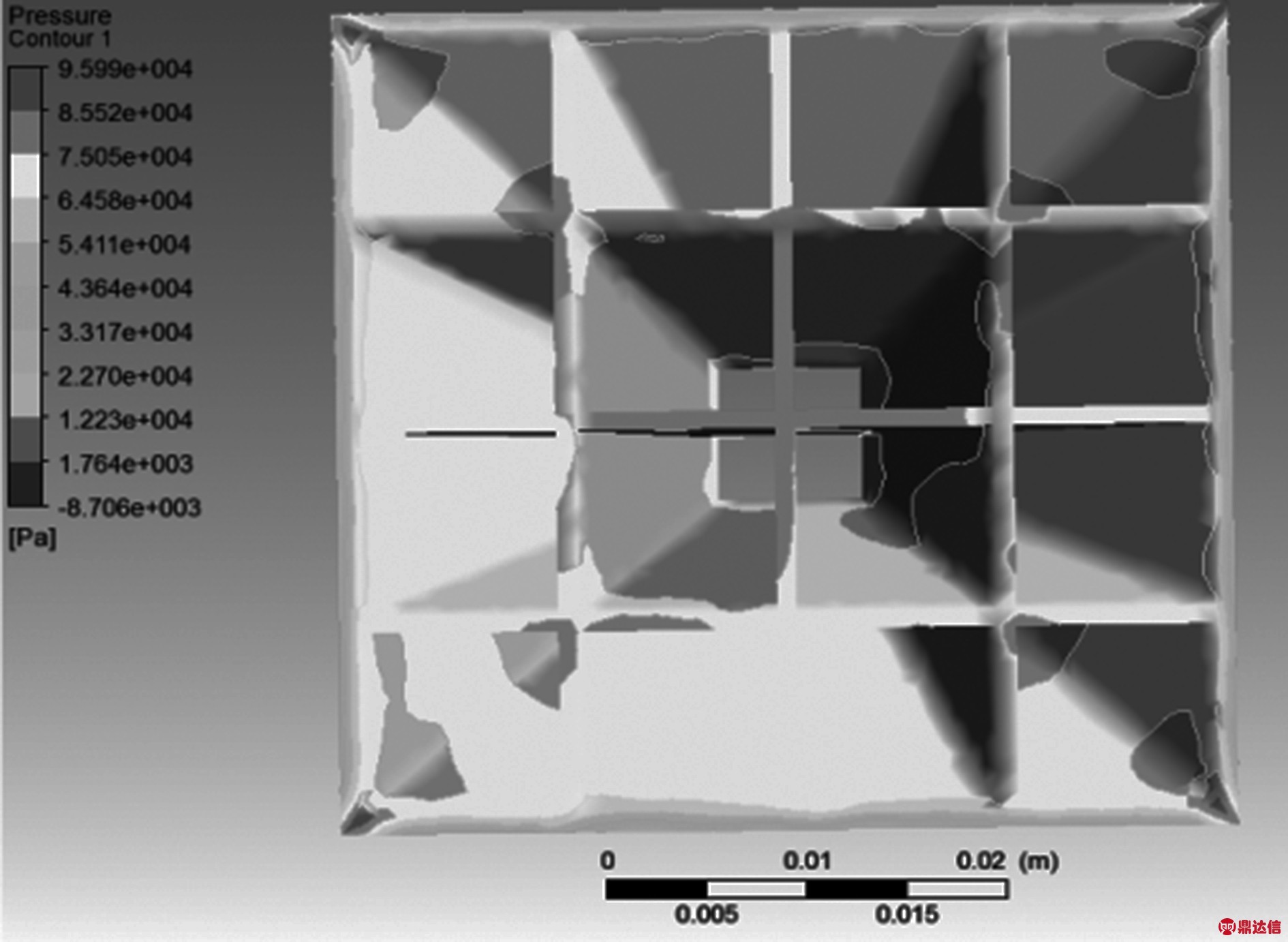
图6 吸盘内压分布图
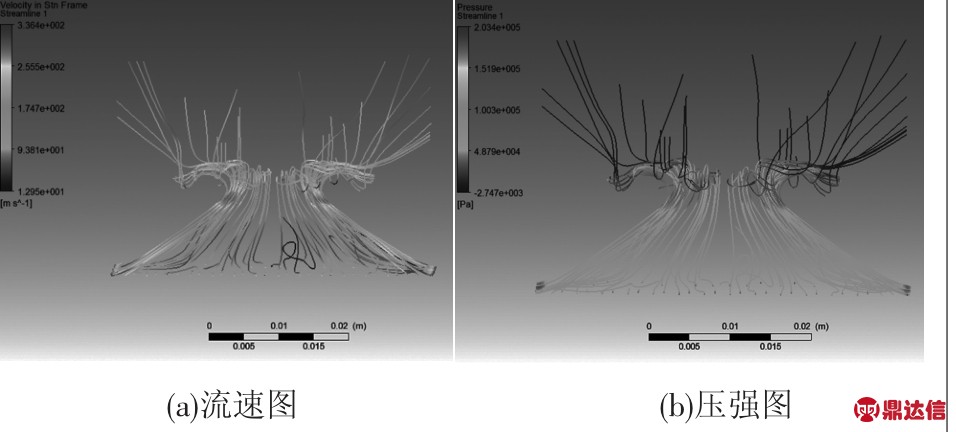
图7 流场流线流速压强仿真图
根据仿真结果对吸盘内部流体流动特点进行分析,气体在吸盘内部流动可分为:4个小尺度漩涡区、高速流动的主流区、汇集区。在气流进入吸盘与壁面间隙的过程中,由于尺寸极小,该部分进入吸盘的流体保持较大的流速,在进入吸盘内部后,气流由两个渠道进行分散,一部分沿棱台壁面的方向向叶轮汇集,该部分流体保持较大的速度形成主流区,这片区域也是吸盘吸附力形成的关键部分;另一部分沿棱台的棱边方向,该棱边与吸附腔入口处会形成一个局部损失部位,在此类型的区域,将会由于压力梯度符号的变化产生气流分离[10],从而形成吸盘四个棱边的四个小尺度的漩涡区。沿吸盘壁面和楞边流入的气流在吸盘出口、叶轮下方汇集。在吸盘内部的气体流动过程中,可以忽略能量损耗,因此均属于有势流动。气流在高速旋转的离心叶轮的作用下,气流速度会明显增大,流体被送出吸盘。
互联网环境下,成人网络学习资源不断丰富,但与权威的正式的教材书籍相比,网络学习资源更需要学习者的辨别和筛选。在信息传播门槛较低的网络时代,成人学习者不再只是单向地被动地接受和理解信息,他们更要保持清醒的头脑有选择性的加工和整理信息。
2 样机的研制与实验
研制了一款爬壁移动平台[15]。如图8 所示,该平台具有吸附机构、行走机构、电控系统等基本单元。经过一系列壁面测试,如图9~图10 所示,该壁面移动平台可以稳定可靠地工作在一般常见的壁面上,如金属、玻璃、外墙等。
3 结语
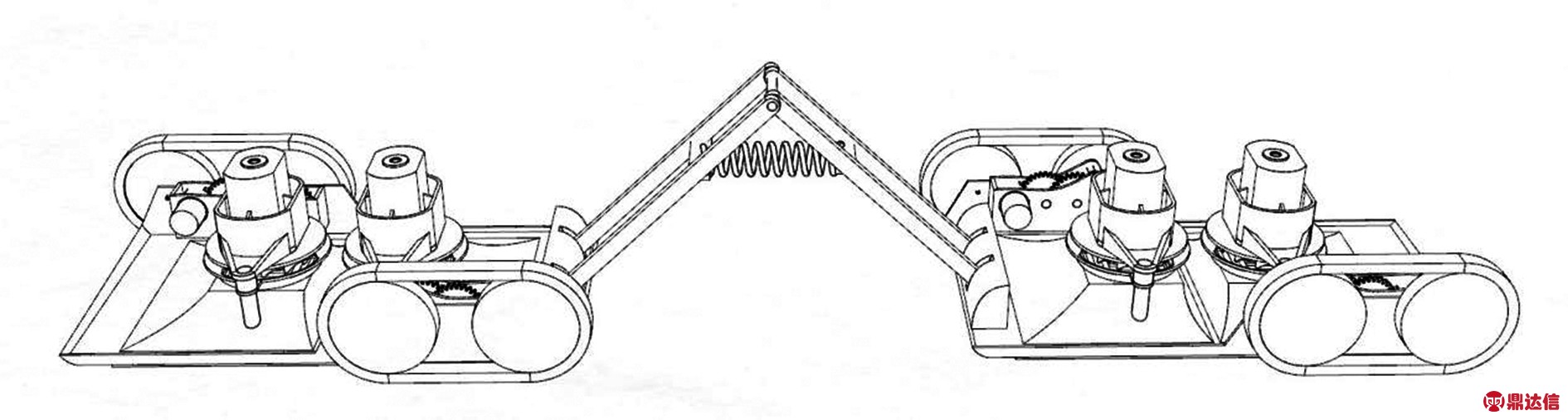
图8 整车构造图

图9 移动平台实物图

图10 移动平台壁面实验图
文中给出的四棱台形式的多网格进气口圆形出口的吸盘形式有利于吸附力稳定和有效地配置,从而提高吸附力的利用效率。在一般的大型机械装备的检测与检测中,壁面缝隙的尺寸通常是小于吸盘进气口的,在途经该类壁面时,转速较高的离心叶轮和剩余的有效进气网格的相互作用,能很好地保持吸附功能,使移动爬壁机器人不至于掉落。吸附腔内部进行的流体力学分析和CFD 仿真对揭示吸附腔内部流场有重要的意义。研制的一款移动爬壁平台达到预期效果。下一步的工作将集中在吸盘网格型腔的优化与缝隙形状与吸附力关系的研究,以提高移动平台的实用价值。


