
1 新研发的大管道疏通设备
1.1 新研发的大管道疏通机器人
主要由3部分组成:一是由大功率柴油机提供液压动力和真空吸力的上装部分,包括大功率柴油机、罗茨真空泵、真空仓;二是履带行走底盘,包括螺旋搅拌装置、防水视频监控、;三是中间真空吸污管。上装部分与现市面上的通用型号的基础上增加了螺旋固化装置,用于对淤泥的固化改良。履带行走装置是该设备的创新点,它弥补了常规清淤设备不能对管道全纵深清淤的缺陷。
1.2 履带行走装置的构成和各部分用途
钛白粉由于其优良的性能被广泛应用于涂料、塑料、油墨、造纸、橡胶、玻璃、陶瓷、型材等众多领域。目前,钛白粉的生产主要有硫酸法和氯化法两种工艺。硫酸法是传统的钛白粉生产工艺,具有原料价格低廉、工艺技术成熟、设备相对简单和操作便于管理等优点,但是该方法最突出的缺点是环境污染大、酸耗量大、能耗高、产生“三废”多、产品质量低。随着现行巨大的环保压力和产品竞争的日益加剧,硫酸法逐渐被生产流程短、生产能耗和生产成本低、产品质量高、三废污染少、生产易于连续化和扩大化的氯化法所取代。国外发达国家基本都采用氯化法钛白粉技术,我国近年来也在大力推进钛白粉产业升级。
履带行走装置的构成和各部分用途如图1所示。
1.3 履带行走装置的关键技术特点
金玉其中:我们看看各分项的数据。11月份装备制造业、高技术制造业和消费品制造业P MI为50.5、51.7和51.6,分别比上月上升0.6、0.1和0.8,且均高于制造业总体水平。非制造业商务活动指数为53.4,比上月回落0.5,表明非制造业增长有所放缓,但仍在扩张区间。11月服务业商务活动指数为52.4,比上月上升0.3,延续增长势头。从市场预期看,服务业业务活动预期指数为59.6,持续位于较高景气区间,企业对行业发展普遍看好。
(1)传感器和视频监控组件设计,视频监控组件通过总线电缆将信号传输到显示屏,对工作环境进行实时监控;双轴位置传感器能实时监控设备的实际状况;通过智能控制,实现了人与淤泥的脱离,所有动作通过陆地上遥控实现,大幅度降低了人工作业强度,使作业人员的人身安全隐患得到解决。
(2)双路控制技术的开发,实现双路智能控制即“CAN总线控制+分线备用控制”。
(3)远(高)距离液压传动设计,履带行走装置及各种动作为全液压动力,安全、高效,液压动力最大发送距离达到200 m。
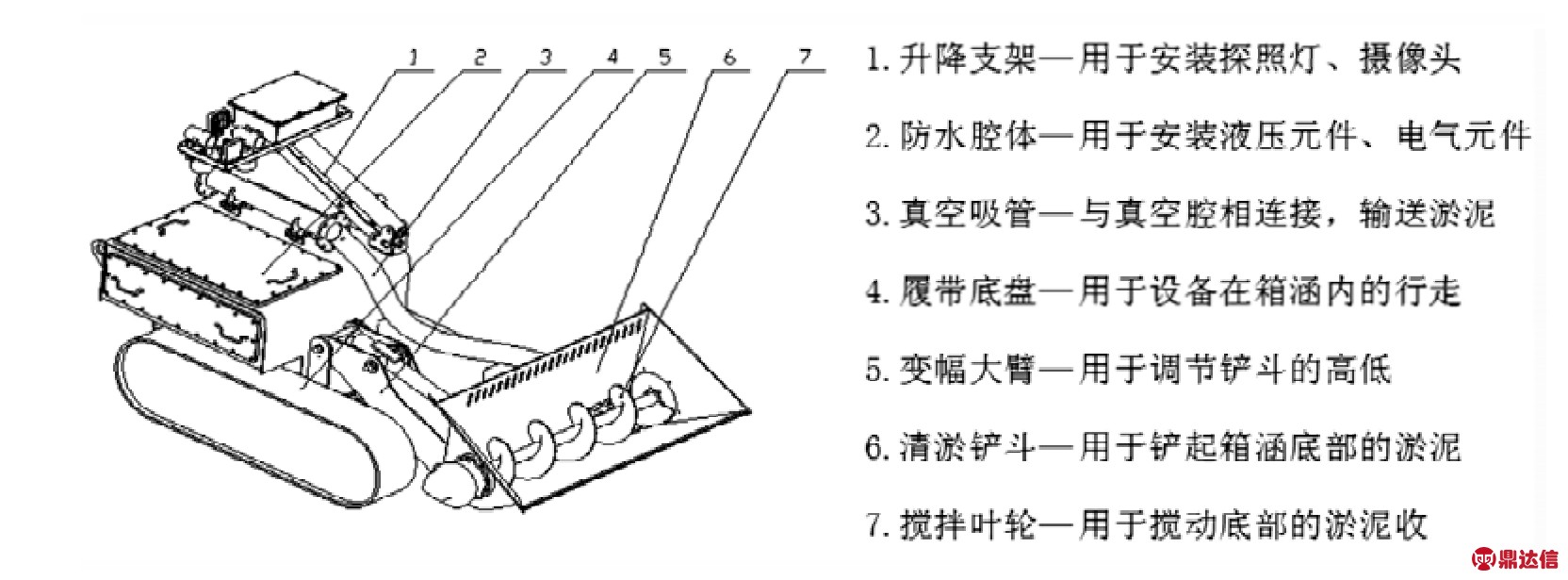
图1 履带行走装置构成图
表1 普通设备与新型设备对比

项目 人工作业 现有常规设备 该新型设备原理 排水后人工清理 排水后,开挖路面,机械加人工清理 直接进入水下清淤成本 高 高低环保 澡声污染、浪费水 澡声污染、对周边 道路交通影响大 不影响施工周边环境效率 低 中高安全 低 中高效果 清淤效率低 清淤效率低 90%以上的清除率
(4)对清淤执行组件中的搅拌叶轮进行重新设计,增加了搅动片和吸口清理片,既提高了吸泥效率又能够有效防止管口堵塞。通过旋钮控制搅拌轮的转动速度,同时配合大功率真空泵,能够吸取到较高浓度的泥浆,大大提高了作业效率,同时也降低了作业成本和工人的劳动强度。
2 工况作业介绍
2.1 污泥初步清理步骤
先将水下疏通设备放入箱涵中,启动动力装置,操作摆臂向下摆动;铲斗调整到搅拌轴上部,而搅拌轴朝下;搅拌马达开始工作带动搅拌轴开始转动,污泥通过真空吸管输送到地面的筹集仓内。
2.2 污泥深度清理步骤
完成污泥初步清理步骤后,污泥逐渐被清理直至搅拌轴的叶片贴近箱涵底部进行污泥深度清理步骤,查看地面控制箱上显示屏履带倾斜角度,当履带倾斜角接近零度,履带行驶至箱涵底部,进一步缩进摆臂油缸以及铲斗油缸,使搅拌轴的叶片进一步贴近箱涵底部,同时搅拌轴面向前方污泥进行清淤作业,进行深层次污泥清理,减少箱涵底部污泥的残留。
2.3 过厚污泥清理步骤
由视频监控判断出污泥厚度过厚时,在完成污泥初步清理步骤后,操作地面控制箱,使摆臂油缸伸出,摆臂向上摆动,结合视频监控摆臂摆动使得搅拌轴到合适的高度进行污泥清理;完成上部污泥清理后,由上往下调整搅拌轴的高度逐步进行污泥清理,循环上述过程直至全部污泥清理完成。
随着围压σ3和孔隙水压pw的增大,加速蠕变启动时间t时长也会延迟,在σ3=5 MPa、pw=0下,加速蠕变至90 MPa曲线的3 h处,持续1 h发生破坏;而在σ3=10 MPa,pw=2 MPa、σ3=15 MPa,pw=5 MPa和σ3=20 MPa,pw=10 MPa时,加速蠕变启动时间分别为破坏阶段的3.52、6.51和11.52 h,分别持续2.54、3.52和5.51 h发生破坏,说明了围压和孔隙水压增大,不仅提升了岩石的蠕变承载能力,并且延长了岩石的最终破坏持续时间。
你有什么怀疑?苏楠改用了你,这样能更快地拉近嫌疑人家属与律师的关系。以后的日子长着呢,老用您就显外,让对方拘束,总好像隔着层什么。
2.4 大块石头或障碍物的清理步骤
通过视频监控发现大块石头或障碍物时,操作地面控制箱上的手柄,使摆臂油缸缩进,铲斗油缸伸出,使铲斗接近大块石头或障碍物的底部,进一步使摆臂油缸伸出,将大块石头或障碍物铲至铲斗内,再操作履带马达手柄,将机器人开至窨井检查口并采用其他设备将大块石头或障碍物运送至路面。
3 实际工程运用
3.1 广州市某区某排水箱涵疏通清淤
一条双通道污水排放箱涵,主要是沉积泥沙,较多生活垃圾箱涵截面3 m×2.5 m,淤泥平均深度0.6m,淤泥以上水深0.3 m。箱涵处在城中闹市区、不适用大规模开挖清理方案。采用该新型疏通设备,只需选一个空地破开一个2.5m×2 m的进口用于下放设备。用该新型疏通设备,日均出泥量为35方左右,含水率≤65%,主要成分是细沙和淤泥。施工作业方式和效果都得到甲方和监理方的较高认可度。
3.2 河北省廊坊市某区某排污箱涵疏通清淤
海风锋的识别,首先要判断海陆风,即发现沿海有来自海上的风。这需要满足两个条件:较稳定的高压控制形势,以及明显的海陆热力差异中有偏冷的海风。显然只有在温暖季节这两条件可同时满足。依据江苏沿海测风塔数据时间序列,对2009年夏季(6—8月)时段进行海陆风识别,考虑江苏海岸线的走向特点,将其分为江苏苏北、苏中、苏南三段,建立三条海岸基准线(图1中的直线段),其中苏北岸段面向海州湾,苏中和苏南岸段则面向开阔黄海。再定义垂直于各段海岸线,包括垂线左右50°范围的向岸风为海风,反之为陆风(图2)。进一步地从所选的海陆风日中提取海风锋天气过程,共选出14个海风锋个例(表2)。
这是一条北方城市典型的市政排污箱涵,箱涵的截面有多种规格最大截面4 m×3 m,离地距离超过4 m。由于水流量不大,排放物杂乱,有机质含量高,较多的建筑垃圾,甲烷、硫化氢等易燃有毒气体含量较高,淤泥乌黑发臭。用该新型大管道疏通设备较顺利地完成了项目施工,作业方式、清淤效果均达到预定要求,工程顺利完成验收。
2018年,既是改革开放40周年,又是卡博特来华30周年。朱戟对此由衷地表示:“卡博特非常荣幸成为中国改革开放这一里程碑式篇章中的亲历者、参与者和受益者。所有卡博特海内外的员工,都对中国及上海这40年的成就叹为观止,由衷地钦佩。卡博特也对能在这40年中对中国的发展作出微薄的贡献,深感荣幸与骄傲。”
3.3 该新型大型管道疏通设备的施工优势对比
从表1的比较中可以得出,该种基于真空吸入式气力输送技术的大管道疏通设备对比传统的疏通方式和常规设备具有效率高、成本低、安全、环保等方面的巨大优势,具有很好的工程施工推广性。
4 结语
21世纪前10年我国城市排水管道清淤总量为已达6亿m,在未来5~15年中,排水管道清淤维护问题将是我国市政建设的重点,预计至2020年可达到9亿m,平均每年要新增清淤量5 000万m。排水管道疏通设备的开发与推广会减少传统清淤方法的使用,在全国范围中计算,每年至少可以减少100万人工成本,可以节省大笔市政建设的开支。该种基于真空吸入式气力输送技术的大管道疏通设备后续还需改进。
(1)设备还需要做得更加小型化,满足小管道疏通的施工要求。
(2)目前设备还只适用于方型箱涵,后续改进要能够兼顾大圆形管道的疏通施工。
(3)要更多地加入智能控制,让人工操作更加简洁,效率进一步提升。


