
摘要:运动精度是评价机构质量的重要考核指标.针对码垛机器人四杆机构,运用矩阵法建立了机构输入,输出关系的运动精度分析模型.在考虑了基本尺寸误差和运动副间隙误差的基础上,运用二阶矩和摄动法给出了码垛机器人四杆机构运动精度可靠性的设计方法,并结合算例求出了不同间隙误差情况下机构位置精度的可靠性指标,并计算出其可靠度.结合可靠性的分析结果,运用可靠性灵敏度技术在算例中给出了码垛机器人四杆机构各随机参数可靠性灵敏度的变化规律.
关键词:码垛机器人; 连杆机构; 运动副间隙; 尺寸误差; 可靠性; 灵敏度
码垛机器人四杆机构运动精度可靠性的高低会直接影响机器人的正常使用.影响机构运动精度可靠性的因素有很多,常见的有尺寸加工误差、弹性变形和运动副间隙误差等.国内外众多学者对于机构运动精度的可靠性问题进行了很多研究.
文献[1]以矩阵法建立了机构运动精度误差分析模型.文献[2]通过对6_PUS并联机器人的运动误差运用单支链D-H参数方法和摄动法进行建模,得到了典型运动模式的误差变化规律.文献[3-5]探讨了运动副间隙误差对机构运动输出精度的影响.文献[6-7]分别对3-CRPa纯移动并联机构和3SPR并联机构进行了运动学特性的分析.文献[8-9]对于平面连杆机构运动精度可靠性灵敏度进行了设计.文献[10-11]利用Edgeworth级数建立了不完全概率信息条件下的机构运动性能系统可靠性分析方法.
现有机构运动精度可靠性理论大多着眼于机构运动精度模型的仿真和考虑机构部分影响因素的可靠性灵敏度设计.本文在考虑连杆机构的基本尺寸误差和运动副间隙误差两方面因素的同时,将连杆机构的运动精度模型与可靠性理论相结合,对图1小臂所在的码垛机器人四杆机构进行了运动精度可靠性及可靠性灵敏度计算.
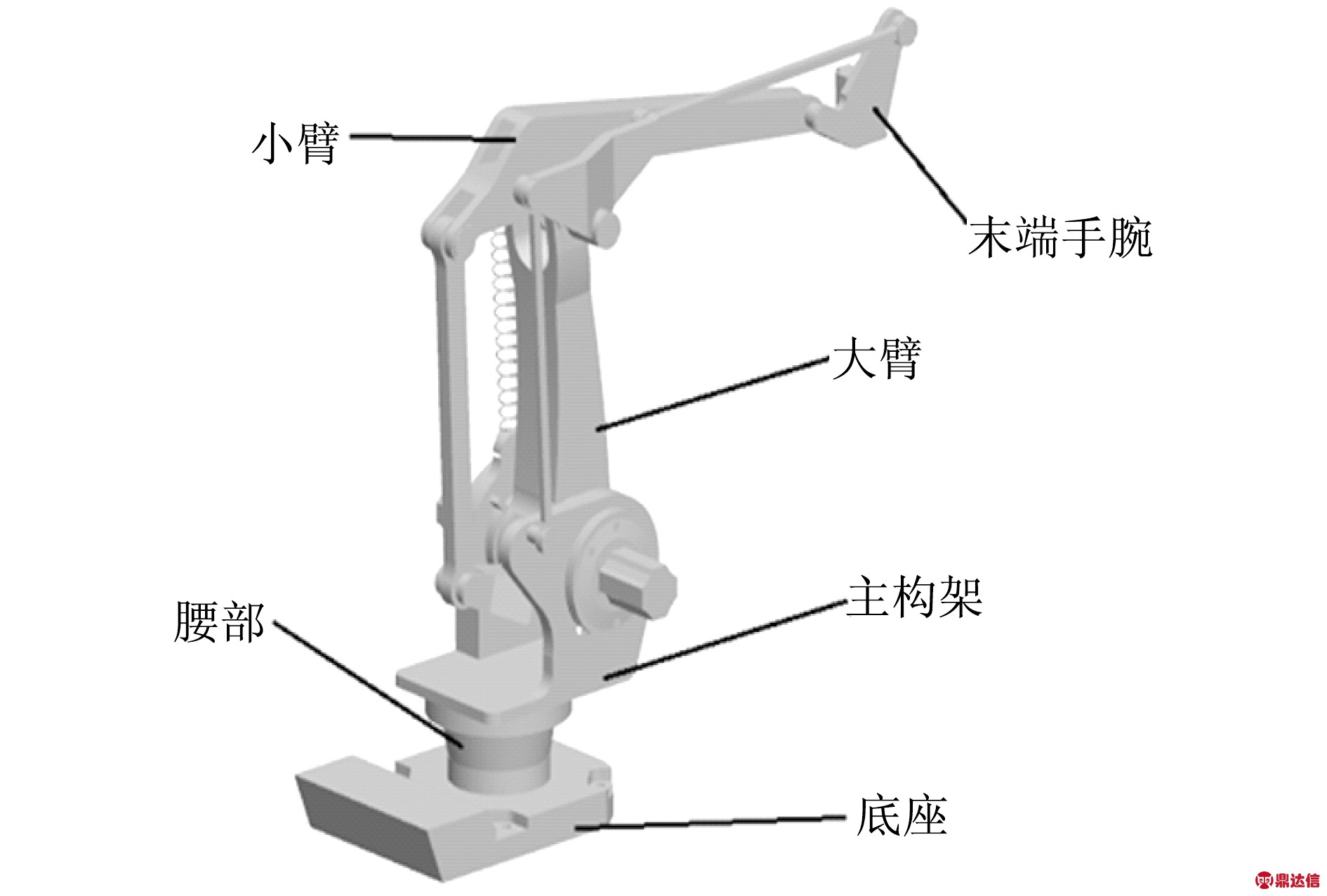
图1 码垛机器人结构简图
Fig.1 The diagram of palletizing robot structure
1 机器人连杆机构运动精度可靠性模型
1.1 运动精度可靠性功能函数设计
机器人连杆机构运动约束方程的一般形式:
F(U,V,L)=0
(1)
式中
F=[f1,f2,…,fλ]T,具有λ个独立的约束方程组;
U=[u1,u2,…,uλ]T,机构的输出参数矢量;
V=[v1,v2,…,vn]T,机构的输入参数矢量;
L=[l1,l2,…,lm]T,机构的结构参数矢量.
对方程组(1)微分[12],以增量形式表示:
![]() ΔU+
ΔU+![]() ΔV+
ΔV+![]() ΔL=0
ΔL=0
(2)
式中,∂F/∂UT,∂F/∂VT和∂F/∂LT为雅克比矩阵.
仅考虑码垛机器人四杆机构误差[13],即ΔV=0,由式(2)可解得的输出误差向量为:
ΔU=-![]()
![]() ΔL
ΔL
(3)
式中,ΔL为构件L的误差向量.
为了使码垛机器人四杆机构能够正常工作,必须使其输出的运动误差在允许的精度误差范围内,即
(4)
式中,
ε=[ε1,ε2,…,εn]T,为四杆机构允许输出运动误差向量.
应用二阶矩和摄动方法[14-18],构建码垛机器人四杆机构运动精度功能函数:
g(ε,ΔU)=ε-ΔU
(5)
四杆机构运动位置输出误差的允许值ε与实际输出误差ΔU是相互独立的随机变量,其相关的随机变量服从正态分布.
定义四杆机构运动精度的可靠性指标为:
β=![]() =
=![]()
(6)
式中 μg——功能函数的均值;
σg——功能函数的标准差.则可靠度的一阶估计量为:
R=Φ(β)
(7)
式中,Φ(°)为标准正态分布函数.
1.2 连杆机构运动精度可靠性灵敏度设计
对于码垛机器人四杆机构,根据可靠性灵敏度定义[18],即为可靠度对基本向量X=[δ,l1,…,ln]T的偏导数:
![]() =
=![]()
![]()
![]()
(8)
式中
![]() =
=![]() =φ(β)
=φ(β)
![]() =
=
把已知条件和可靠性计算结果代入式(8),就可以获得四杆机构的可靠性灵敏度∂R/∂![]() T.
T.
2 考虑基本尺寸误差及机构运动副间隙误差的四杆机构可靠性分析
2.1 考虑基本尺寸误差的四杆机构可靠性分析
四杆机构的基本尺寸误差即各杆件的几何长度误差,主要是由于加工制造造成的.本节就连杆基本尺寸误差对码垛机器人四杆机构可靠性的影响进行分析.
如图2所示为码垛机器人的四杆机构简图,以输出角α2和α3为研究对象,则输出向量为:U=[α2,α3]T,输入向量V=α1,结构参数向量:L=[l1,l2,l3,l4]T,各结构尺寸参数满足正态分布规律.
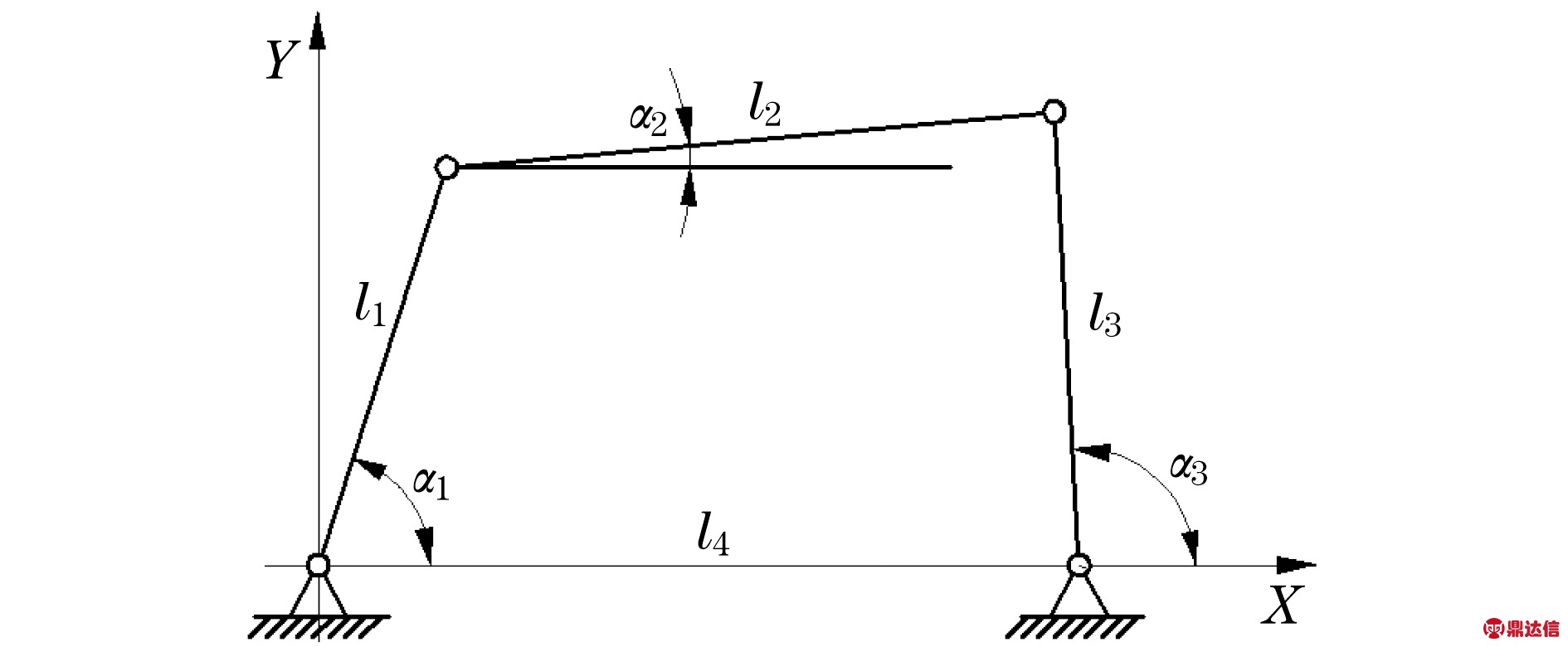
图2 码垛机器人四杆机构
Fig.2 Four bar linkage of palletizing robot
根据铰接四杆机构运动分析,建立输入与输出关系模型:

(9)
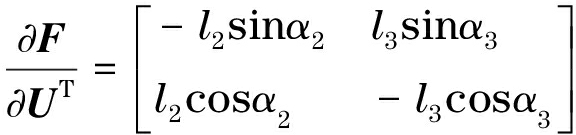
四杆机构输出参数的雅克比矩阵:
四杆机构结构参数的雅克比矩阵:

由上述分析可将有关量代入相关公式可解出考虑基本尺寸误差影响的平面四杆机构的运动精度可靠度及可靠性灵敏度.
2.2 机构运动副间隙误差理论
机构的运动副间隙误差主要是由生产制造和不合理装配以及运动副长时间运行磨损造成的.Lee在1991年提出“有效长度模型”理论[19],对于铰链式运动副建立了可靠性分析模型.如图3所示即为铰链连接示意图.销轴的中心在误差圆范围内随机分布.误差圆半径由套孔直径和销轴直径差来决定.
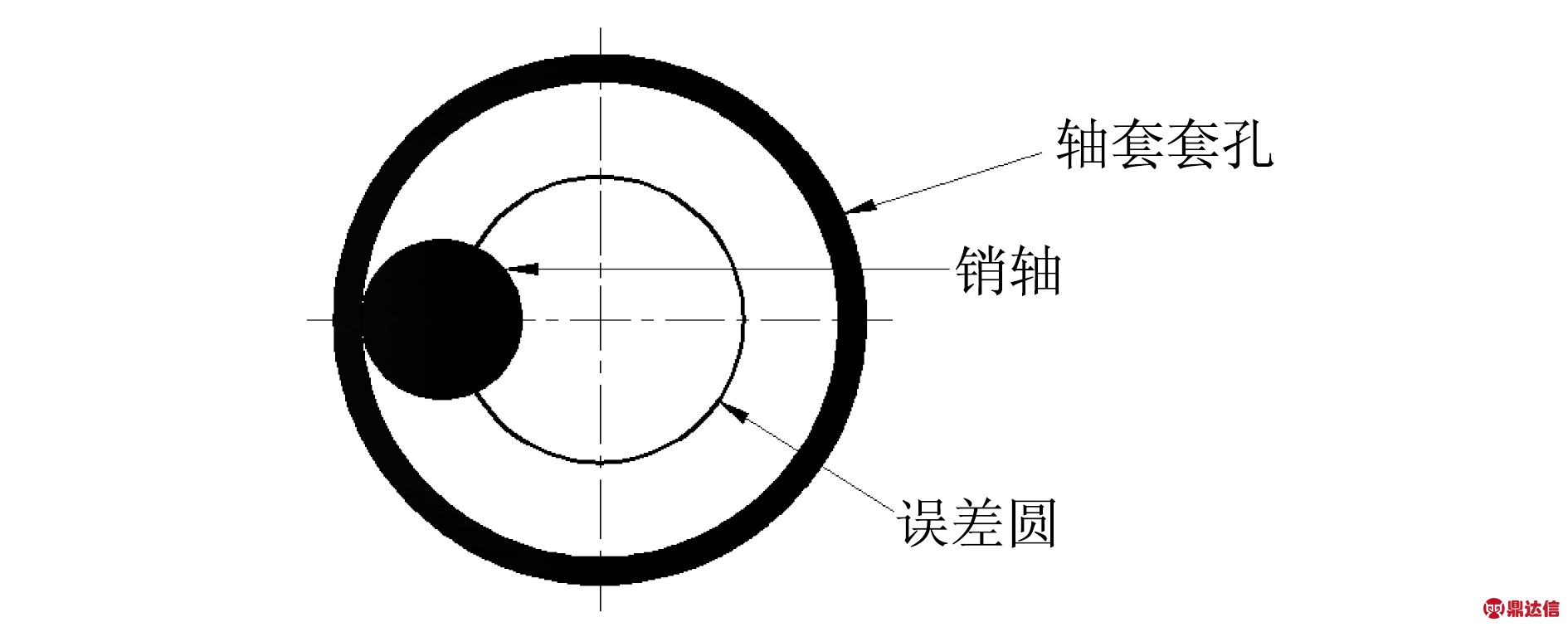
图3 关节铰接示意图
Fig.3 Diagram of hinge joint
图4为铰链运动副有效连接示意图,设P为套孔中心,C点是销轴中心,连杆OP长为l.由于运动副间隙的影响,OC为有效连杆长度,设为R.由几何关系得出:
R=![]()
(10)
式(10)中,x,y为销轴中心的局域坐标.P为局域坐标的圆心,x以OP方向为正方向.
Rc=(d套孔-d销轴)/2
(11)
式(11)中,Rc为运动副的径向误差,也即误差圆半径.
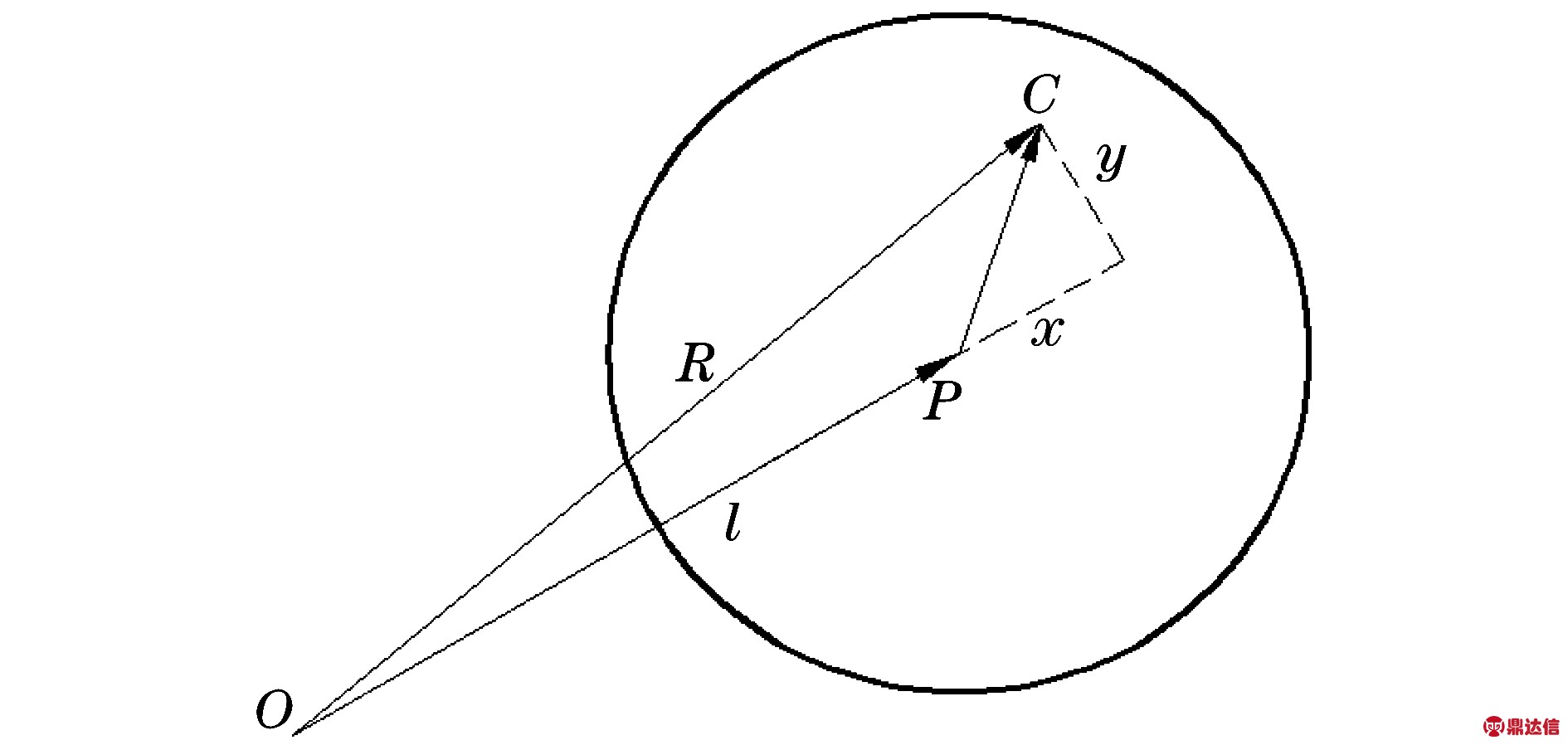
图4 运动副有效连接模型
Fig.4 Kinematic pair effective connection model
对成批构件抽样后会发现距离O点长度为R的销轴中心C是在半径为Rc的误差圆内随机分布的,也即x,y的分布为标准正态分布,所以有:
E(x)=E(y)=0
(12)
又因为:

(13)
由概率统计知识易得:

(14)
由式(11)和式(20)可得:

(15)
式(12)-式(15)中![]() 分别为某销轴中心局域坐标x,y的均值和方差
分别为某销轴中心局域坐标x,y的均值和方差![]() 为径向间隙误差的方差;E(Rc)是径向间隙误差的均值.
为径向间隙误差的方差;E(Rc)是径向间隙误差的均值.
2.3 同时考虑基本尺寸误差和运动副间隙误差的四杆机构可靠性分析
根据上述理论及其及其分析结果,推导同时考虑基本尺寸误差和运动副间隙误差两种因素影响下的码垛机器人四杆机构运动精度可靠性及可靠性灵敏度计算方法.设杆l1,l2,l3,l4的有效长度为R1,R2,R3,R4,杆l1与机架支座之间的铰链径向间隙为RC1,l1与l2之间的铰链径向间隙为RC2,l2与l3之间的铰链径向间隙为RC3,l3与机架之间的铰链径向间隙为RC4.
根据上述理论,用有效长度R代替实际杆长,代入式(9),得:
(16)
由式(10)可得其均值满足:
E2(R)=E2(l)+2E(l)E(x)+E2(x)+E2(y)
又由式(12)可得杆件有效长度和实际长度的期望值相同,即E(R)=E(l),所以同时考虑尺寸误差和运动副间隙误差情况下的输出误差期望和只考虑尺寸误差时的期望相同,给定允许误差不发生变化,可以得到用有效长度R代替杆长l后,对码垛机器人四杆机构输出误差的期望μg没有影响.
下面来讨论对方差的影响:对于图4当中的模型,令x′=li+x,则R=![]() ,D(x′)=D(x)+D(li),E(x′)=E(x)+E(li).
,D(x′)=D(x)+D(li),E(x′)=E(x)+E(li).
同时考虑基本尺寸误差和运动副间隙误差的某一杆的有效杆长的运动精度输出误差的方差为:
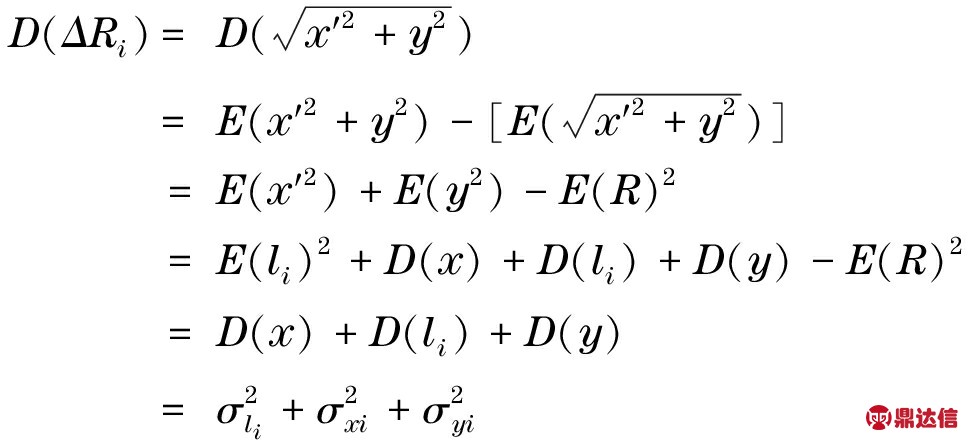
(17)
式中 D(ΔRi)——某一杆有效杆长的运动误差方差;
li——某一杆的实际长度;
![]() 某一杆杆长误差的方差;
某一杆杆长误差的方差;
![]() 分别是某一杆的铰链局域坐标x,y的方差.
分别是某一杆的铰链局域坐标x,y的方差.
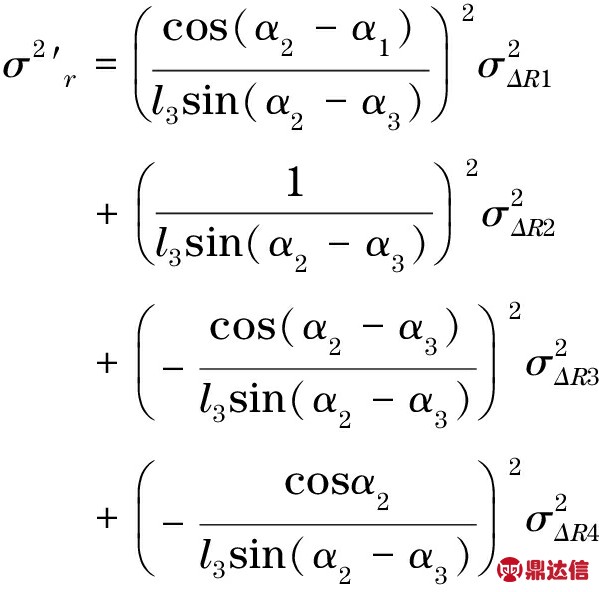
由式(4),式(15)和式(17)可得同时考虑基本尺寸误差和运动副间隙误差的码垛机器人四杆机构输出误差的方差,即:
(18)
由上述分析,可计算出同时考虑两种误差因素影响下的码垛机器人四杆机构运动精度的可靠性设计方法,同时也可对其进行运动精度可靠性灵敏度设计.
3 数值算例
如图2所示,已知码垛机器人各杆件的几何尺寸分别为:l1=300 mm,l2=700 mm,l3=500 mm,l4=600 mm.取差变系数c=0.005.码垛机器人四机构运动输出角度α3的误差允许值δ=1.5°.求四杆机构输入角度α1在0~180°的变化范围内输出角度α3≤δ时的运动精度可靠度和可靠性灵敏度.
为了比较不同运动副间隙对码垛机器人运动精度的影响程度,设置了4 组不同的间隙数值进行分析.表1中给出了码垛机器人四杆机构4种大小不同的运动副间隙的均值和标准差,通过计算可以得到输出角度误差α3≤δ时的运动精度可靠度曲线如图5所示.
表1 四杆机构4种运动副间隙的均值和标准差
Tab.1 Reliability of the four bar linkage motion accuracy

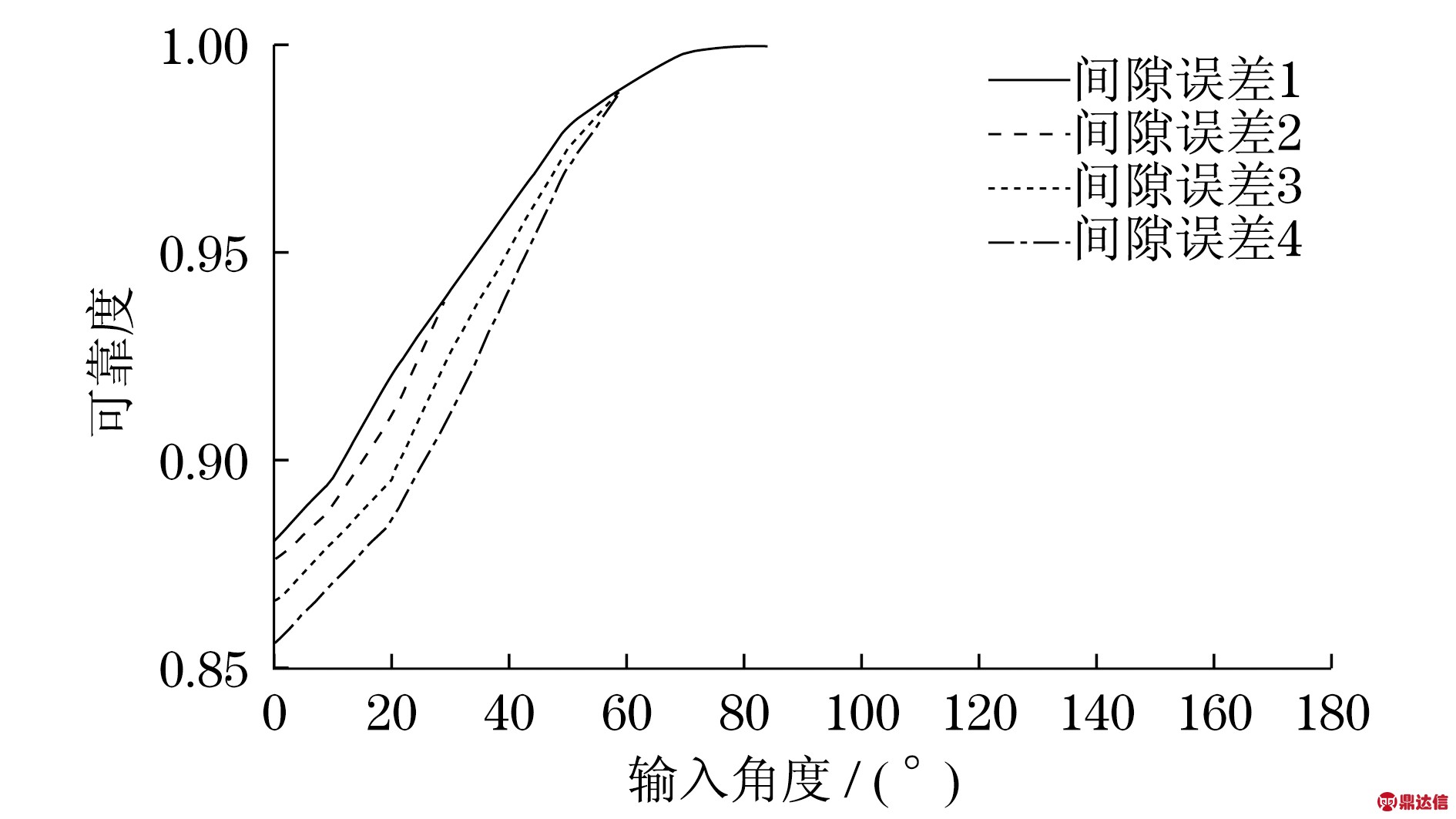
图5 码垛机器人运动精度可靠度曲线
Fig.5 The motion precision reliability curve of palletizing robot
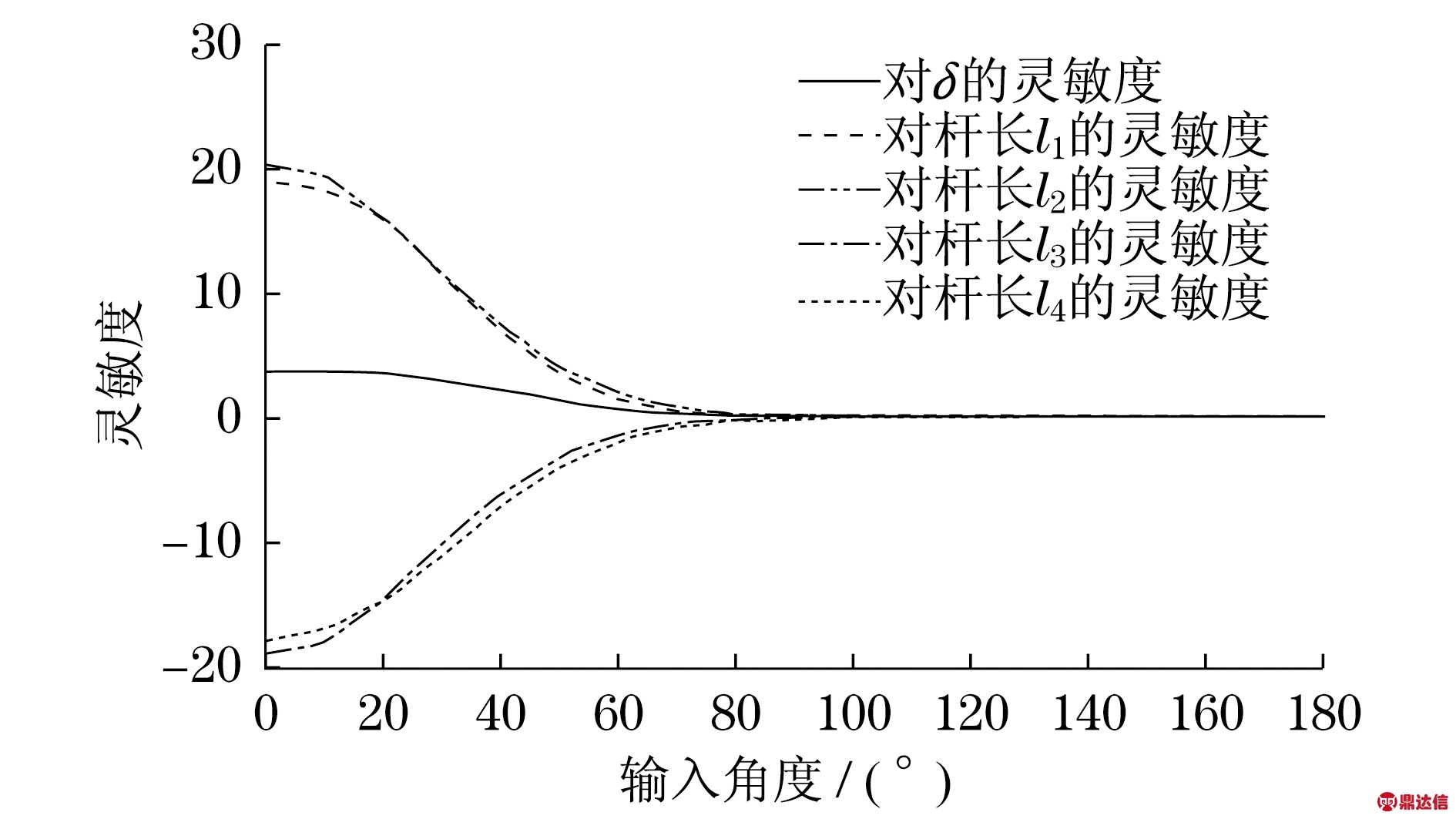
图6 码垛机器人运动精度可靠性灵敏度曲线
Fig.6 The motion precision reliability sensitivity curve of palletizing robot
由图5可知码垛机器人运动精度可靠度在0-90°的变化范围内,随着输入角度的增加而增加.而且可靠度随着运动副间隙误差的增大而降低.在90°-180°的范围内码垛机器人运动精度保持高可靠度,运动副间隙误差对其影响较小.
在可靠度的分析基础上,为了分析四杆机构各杆长参数对于码垛机器人可靠性的影响程度可以由式(8)计算得到如图6所示的不考虑运动副间隙误差情况下的码垛机器人四杆机构的运动精度可靠度R对基本随机参数X=[δ, l1, l2, l3, l4]T的均值的可靠性灵敏度曲线.
从图6中的灵敏度曲线可以看出随着码垛机器人输入角度的不断增加,杆长 l1, l2, l3, l4的可靠性灵敏度绝对值和误差允许值δ的灵敏度数值逐渐降低并在输入角度接近90°的时候趋于0.由上述分析可知:适当增加杆长l1及l2的均值可以提高四杆机构的输出位置精度可靠度;但增加杆长l3及l4的均值,将会使四杆机构的输出位置精度可靠度降低.
4 结论
(1) 通过对码垛机器人四杆机构输入角度的运动精度可靠性分析结果可知:码垛机器人输入角度在锐角的范围内变化时,运动精度可靠度随着输入角度的增加而增加,此时运动副间隙误差对其影响较大;在钝角的范围内运动精度保持高可靠度;此时运动副间隙误差对其影响较小,可忽略.
(2) 通过对码垛机器人可靠性灵敏度曲线的分析可知适当增加杆长l1及l2的均值可以提高四杆机构的输出位置精度可靠度;但增加杆长l3及l4的均值,将会使四杆机构的输出位置精度可靠度降低.


