
摘 要:针对高速码垛机器人高速、高加速度、大负载的工作特性,提出一种考虑关节柔性的高速重载码垛机器人结构建模及动态特性分析方法。首先,建立刚柔耦合动力学模型,对高速重载码垛机器人的关节柔性进行描述;其次,基于建立的刚柔耦合动力学模型,对机器人的重要动态特性——振动模态进行分析;最后,设计力锤瞬态激励实验,对2种方法的有效性进行验证。实验结果表明,该结构建模方法有效地分析了高速重载码垛机器人关节柔性的影响,动态特性分析方法有效地分析了机器人的振动模态。
关键词:高速重载;关节柔性;模态分析;动态特性
0 引言
随着高速重载码垛机器人在汽车、冶金和物流等行业的广泛应用,自动化生产线对机器人的搬运速度、负载能力、加速度和定位精度提出了更高的要求。针对高速码垛机器人高速、高加速度和大负载的工作特性,仅仅在运动学层面上完成结构分析还不够,有必要对机器人本体进行面向动态特性的动力学分析。Murphy在考虑包括回差在内的非线性环节的基础上,利用牛顿欧拉法,建立了完整的机器人柔性动力学模型[1]。Bridges和Dawson在此基础上把传动摩擦等非线性柔性也考虑在内,使得柔性关节模型更趋于完善[2]。对于典型的谐波传动,Ghorbel建立了谐波减速机模型,通过理论和实验分析验证了减速机柔性对运动的影响[3-4]。可以看出,以往针对码垛机器人的动力学建模及分析,仅仅停留在对机器人运动学层面上,并没有对机器人的动态特性这一关键因素进行分析。
针对上述问题,从高速重载码垛机器人的工作特性出发,提出一种考虑关节柔性的高速重载码垛机器人结构建模及动态特性分析方法。
1 刚柔耦合动力学建模
1.1 机构运动学模型
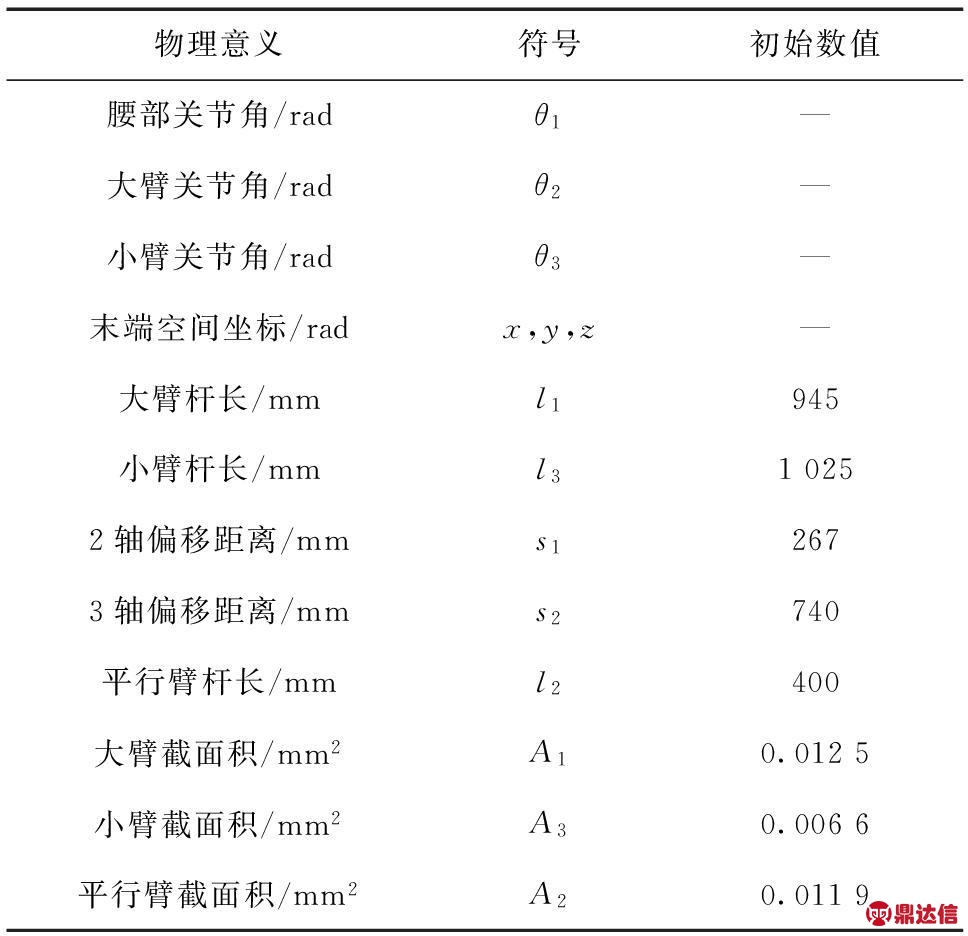
码垛机器人的双平行四边形机构如图1所示,由2组平行四边形组成。整个机构属于串并联混合机构。高速重载码垛机器人主要结构物理参数定义及数值如表1所示。

图1 双平行四边形高速码垛机器人
表1 主要物理参数定义
根据双平行四边形几何关系,对模型进行简化,并利用D-H法进行运动学分析,最后可得运动学正解为:

(1)
1.2 刚柔耦合动力学建模及仿真验证
采用拉格朗日第二类方程进行建模,选取3个主动关节θ1,θ2,θ3作为广义坐标,对机器人所有部件进行动能势能的求取,最后列写动力学方程。
整理可得系统刚体动力学方程为:
(2)
可得惯量阵表达式为:
(3)
![]() m9+11.64
m9+11.64
可以看出2、3轴惯量为常值,与转角无关;2、3轴与1轴间解耦,2轴与3轴之间存在耦合关系。
机器人柔性关节等效原理如图2所示,将减速机等效成刚性减速装置和柔性扭杆两部分。电机输出力矩和角度分别为Tm和θm,机器人关节输出力矩和角度分别为Tl和θl,电机转子惯量为Jm。减速机刚度为K,阻尼比为B,减速比为I。
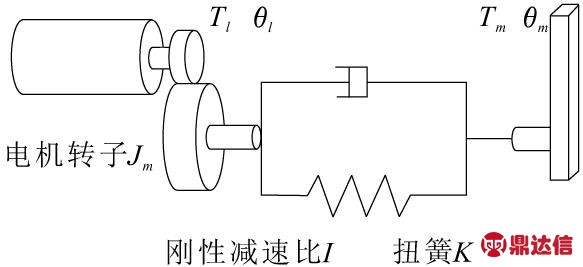
图2 柔性关节模型
可以推导出如下关系:
(4)
消去中间变量,得到最后的刚柔耦合模型:
(5)
将SolidWorks中的机器人三维模型导入ADAMS,对减速机和电机以及微小部件进行简化处理后,得到虚拟样机模型。码垛机器人典型工作循环为负载抓起→负载腰转→负载堆垛→空载抬起→空载回转→空载下放,可采用门字形速度运动轨迹运动。对比由动力学方程获得的Matlab力矩曲线与ADAMS仿真获得的力矩曲线,验证动力学方程的正确性。
由图3可知,三轴力矩误差较小,说明动力学方程以及各项表达式在形式上是正确的。误差的主要原因可能是忽略了摩擦力等阻尼项造成的。
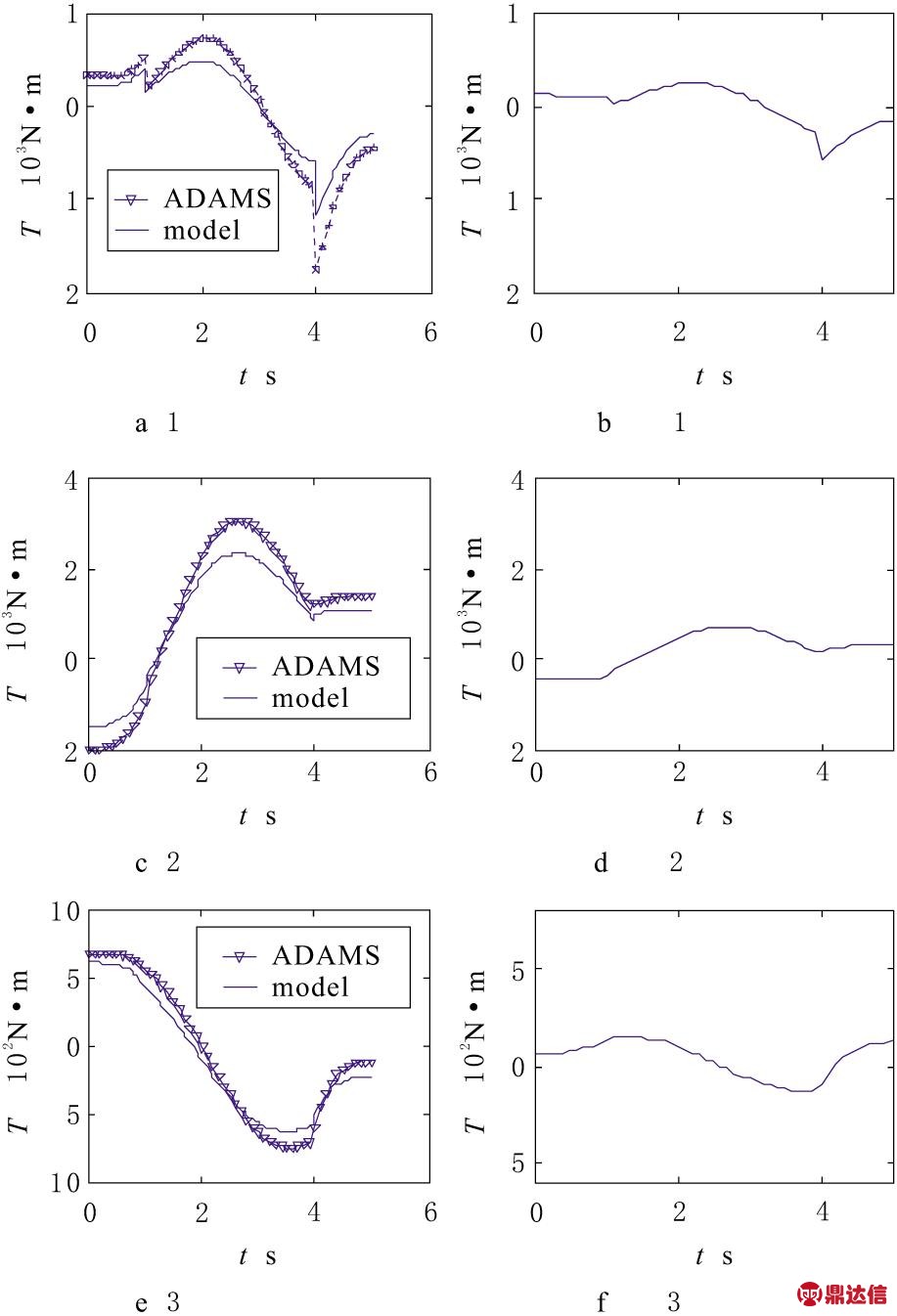
图3 各轴关节力矩比较
2 振动模态分析
根据多自由度系统模态理论,分析机器人的系统振动方程,首先考虑一般情况下的振动。由于电机位置固定,θm为定值,重力项对模态影响相对较小,可忽略不计。根据刚柔耦合动力学模型,经过简化后系统振动方程可写成:
(6)
由于质量矩阵是关节角度的函数,在进行计算时,可以首先以初始位姿为依据,确定各关节角度。但是阻尼矩阵C在这里无法确定,可通过进行多自由度有阻尼振动系统的模态分析,分析阻尼矩阵对于系统固有频率的影响情况。
由于质量矩阵和阻尼矩阵不是对角矩阵,说明几个方程间存在相互耦合关系,无法通过单自由度振动问题进行求解,因此,在这里采用振型叠加法来进行求解。
阻尼矩阵根据Rayleigh阻尼假设可写成:
(7)
第j振型的阻尼比可以写成:
(8)
为了使各个方程之间相互解耦,可以用模态坐标来表示任意向量,即
(9)
φi为结构无阻尼振动归一化处理之后的模态向量;Φ为由φi组成的模态矩阵,n×n阶;δi为参与因子(也称为权值)。
将式(9)代入式(6),并用ΦT前乘上式各项,可得:
(10)
根据模态矩阵的正交性,有
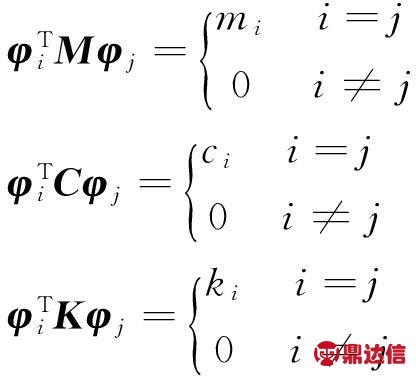
(11)
式(10)可以写成:
(12)
M,C′,K′分别为广义质量矩阵,广义阻矩阵,广义刚度矩阵;T′位广义激振力。
式(12)中各矩阵皆为对角阵,即各个变量之间已没有耦合作用,把原多自由度振动方程转换为了多个单自由度振动系统的叠加。式(12)可以简化成多个单自由度方程:
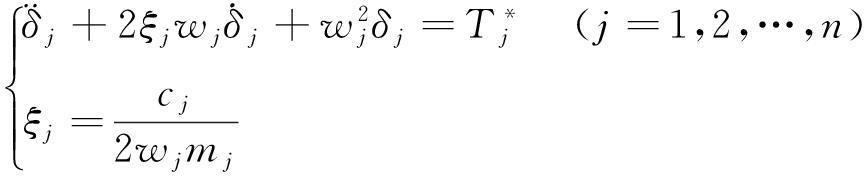
(13)
wj为无阻尼自由振动固有频率;ξj为定义为第j阶阻尼比,为系统固有属性。
求解式(13),可得解为:
(14)
![]() 为有阻尼状态下固有频率。对于阻尼比的确定,根据经验数据,对于钢制结构阻尼比范围在0.01~0.02之间,考虑关节摩擦等影响,取ξ=0.05,代入固有频率的计算中,可以得出
为有阻尼状态下固有频率。对于阻尼比的确定,根据经验数据,对于钢制结构阻尼比范围在0.01~0.02之间,考虑关节摩擦等影响,取ξ=0.05,代入固有频率的计算中,可以得出![]() =0.997 5wj。即相对于无阻尼系统固有频率,阻尼的存在会减小固有频率,但是相对程度较小,且阻尼具体数值难以准确获得。在本课题中,计算码垛机器人系统的固有频率,在保证精度的前提下,忽略阻尼对固有频率大小的影响。同时,也可以根据非线性振动理论,对于常数阻尼或者非线性阻尼,因为阻尼对振动规律影响较小,在计算固有频率时,可以进行忽略[5]。
=0.997 5wj。即相对于无阻尼系统固有频率,阻尼的存在会减小固有频率,但是相对程度较小,且阻尼具体数值难以准确获得。在本课题中,计算码垛机器人系统的固有频率,在保证精度的前提下,忽略阻尼对固有频率大小的影响。同时,也可以根据非线性振动理论,对于常数阻尼或者非线性阻尼,因为阻尼对振动规律影响较小,在计算固有频率时,可以进行忽略[5]。
根据以上分析,求取自由振动状态下固有频率,振动方程可以写成:
(15)
固有频率可由下式求取:
(16)
定义D=M-1K为动力学矩阵,系统固有频率和D矩阵特征值的关系如下:
(17)
机器人惯量矩阵与关节转角相关,即机器人固有频率与其姿态有关。K为工业机器人用的减速器刚度值,如表2所示 。
表2 码垛机器人前三关节RV减速机参数表
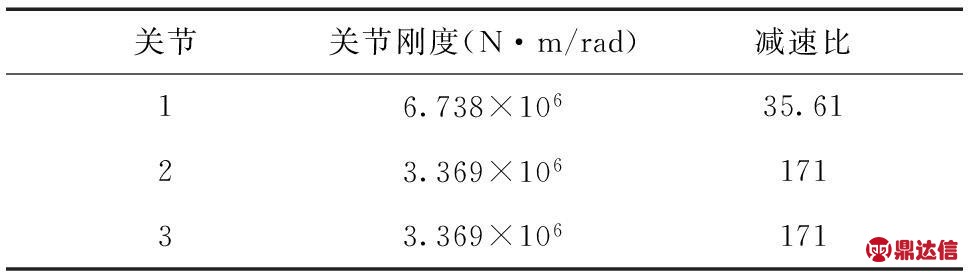
故机器人关节刚度矩阵可以表示成:
(18)
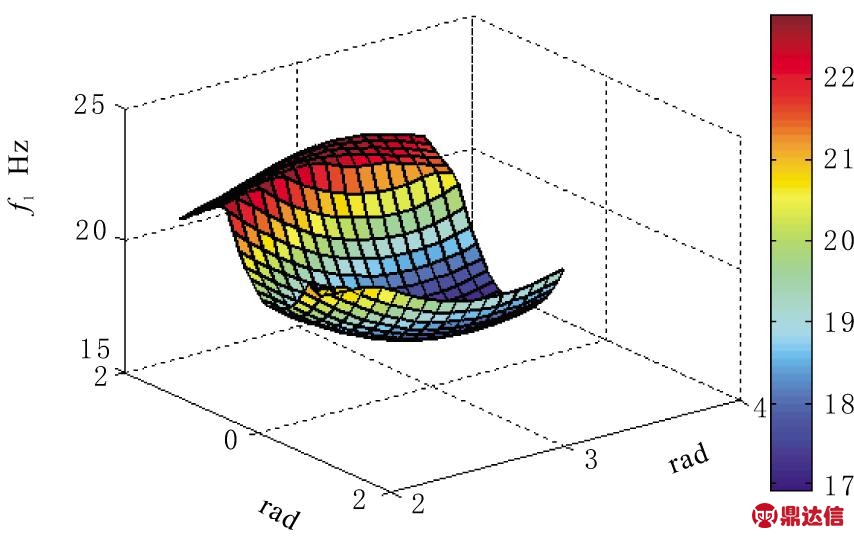
低阶振动固有频率由结构参数决定[6],同时也受关节转角θ2和θ3的影响,在进行结构优化之前,首先找到工作空间内固有频率最低处机器人姿态,以此处固有频率为参考进行优化,机器人最低阶振动频率同转角的关系如图4所示。
图4 一阶振动固有频率关节空间分布
从图4可知,机器人在θ1=0,θ2=0.174 5,θ3=2.446 3姿态处固有频率最低,此处一阶固有频率f1=17.25 Hz。
3 码垛机器人动态特性分析验证试验
由于机构比较复杂,且仿真分析进行了一定的简化,有限元分析手段得到的模态分析结果存在一定的局限性。因此,有必要借助模态实验设备进行机器人模态特性分析实验,作为仿真分析的验证。
3.1 实验目的和仪器
实验目的:通过模态实验分析样机的动态特性,重点考察低阶振动固有频率。
实验仪器:Bobcat动态分析仪,PCB型加速度传感器,内含力传感器的PCB086D20型激振锤,计算机等。实验原理如图5所示。
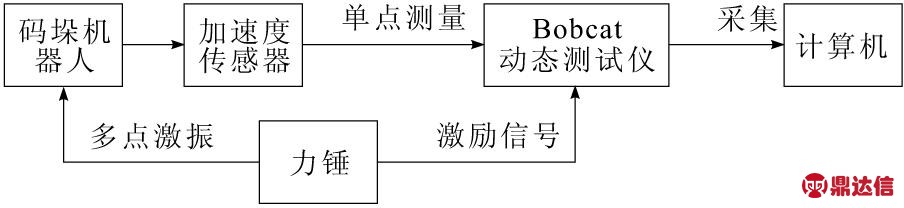
图5 振动实验原理
在实验中,采用动态测试系统的Bobcat和Star7 2个软件。Bobcat主要用于采集力锤和加速度传感器的数据,主要包括通道设置、采集设置、数据保存和控制窗等模块。Star7主要用于数据处理,包括几何建模、固有频率分析和振型分析等模块。振动试验测试系统如图6所示。
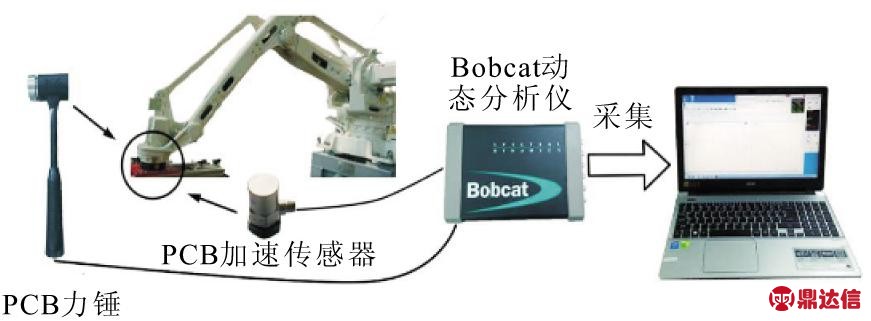
图6 振动实验测试系统
3.2 实验方案
本实验通过测试机器人所处于3个典型位姿(机器人回收、自然及伸长状态,简称位姿1、位姿2、位姿3)时的动态特性,可以大概得到码垛机器人在工作空间内的动态特性情况。码垛机器人通过机架固结在地上,可以近似认为大地导纳为零,即对整体结构采用地面支撑的方式。本实验采用力锤瞬态激励方式,这种方式适合中、小型阻尼结构的激励。通过力锤施加激励,加速度传感器得到系统的响应,具有实验设备简单、激励点选择灵活、周期短和信号范围宽等优点。
具体测试方案为:在末端手腕处沿全域坐标系的X,Y,Z方向,布置加速度传感器,采用多点激励单点拾取的方法测试码垛机器人的动态特性。在机器人底座、支架以及大小臂的规定测点处,以局部坐标系为依据,沿X,Y,Z方向用力锤分别进行激励,通过加速度传感器测量到末端的响应信号,力锤和加速度传感器的数据经由传输线传输到Bobcat中,由Star7软件进行分析处理,可以得到系统的动态特性。为减小环境等干扰信号的影响,除了选取合适的触发阈值外,在每个测点处平均敲击10次。全域坐标系Z方向垂直向上,X方向在机械臂所在平面,沿水平方向指向末端,Y轴方向通过右手定则确定。激振点位置图如图7所示。
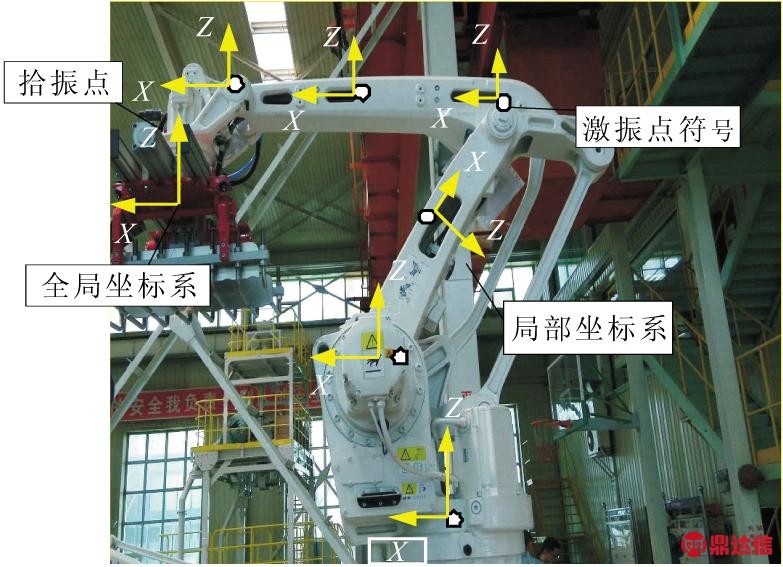
图7 实验激振点拾取点位置
3.3 实验结果
经试验测得各个位姿下的固有频率实验值及仿真值,分别如表3、表4、表5所示。
表3 位姿1处仿真和实验结果比较
Hz
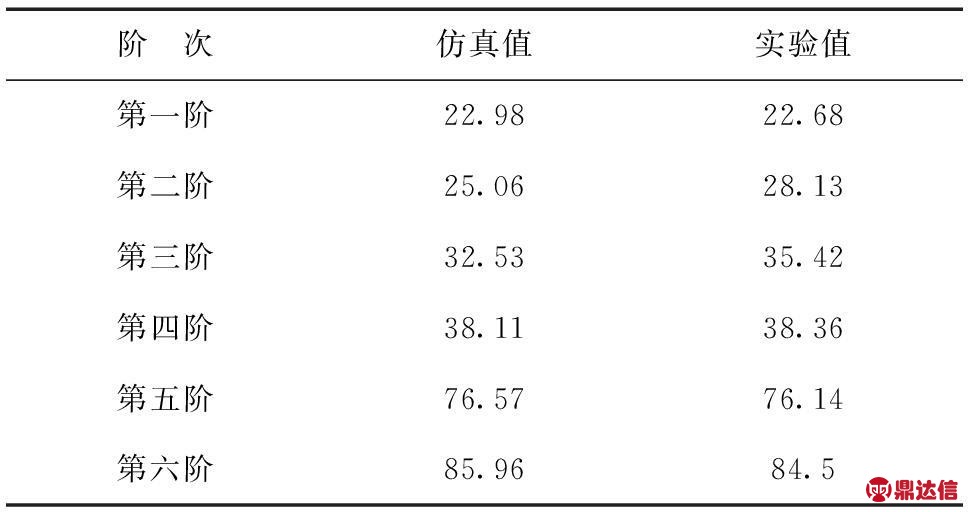
表4 位姿2处仿真和实验结果比较
Hz
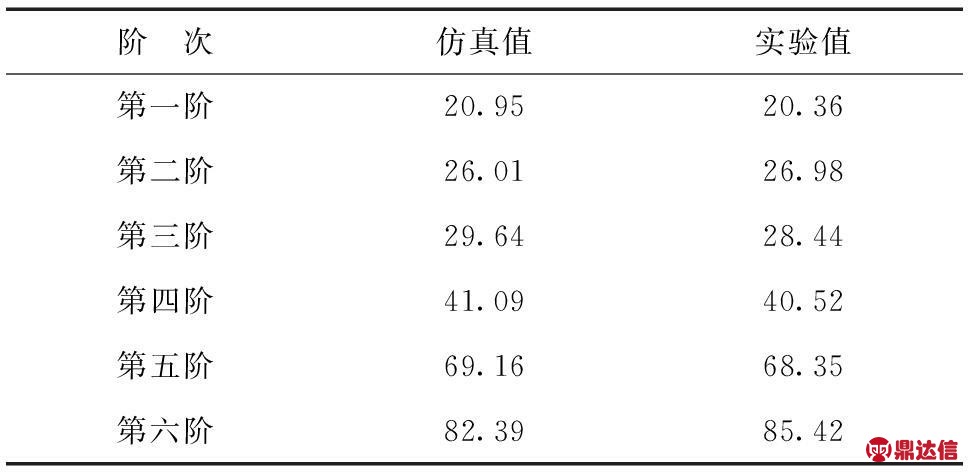
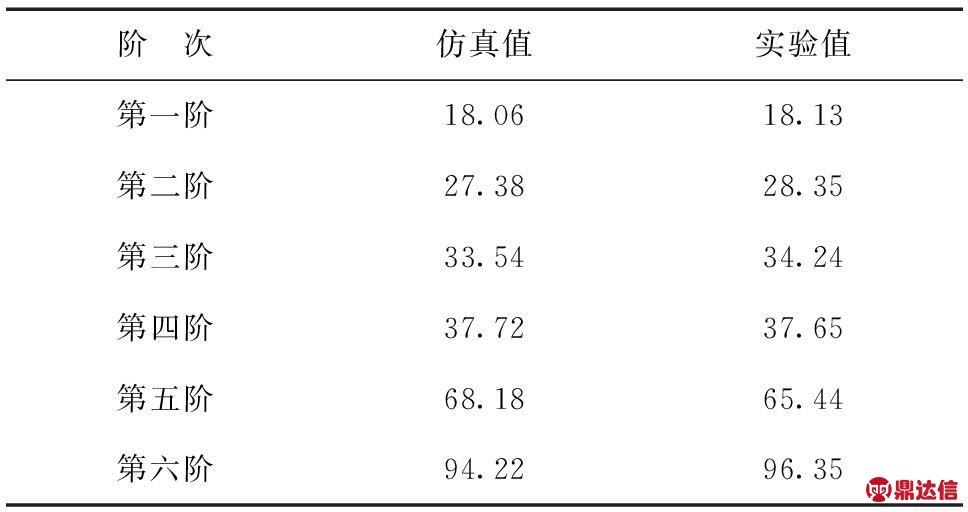
表5 位姿3处仿真和实验结果比较
Hz
4 结束语
结合高速码垛机器人高速、高加速度和大负载的工作特性,提出了一种考虑关节柔性的高速重载码垛机器人结构建模及动态特性分析方法。通过设计力锤瞬态激励实验对2种方法的有效性进行验证。通过对实验结果及仿真结果进行对比可知,仅有很小的误差。产生误差的原因可能是:在仿真中忽略了阻尼以及非线性接触等;实验模态分析时,数据采集中产生的误差也会对结果产生影响。这也说明了这种考虑关节柔性的重载码垛机器人结构建模及动态特性分析的有效性。


