
摘要:本文通过Solidworks软件对码垛机器人的三维模型进行建立,得到了总体设计模型;,然后,采用ANSYS Work⁃bench15.0对码垛机器人的关键零件进行了有限元分析,给出了静力学分析和校核关键零部件的强度与刚度是否符合安全性。
关键词:码垛机器人;有限元分析;静力学分析
引言
码垛机器人在自动化生产领域具有的作用是不言而喻的,对于其结构设计的正确性与合理性直接关系到码垛机器人运行的可靠性,所以根据需求来进行结构的合理设计,直接影响机器人的抓取载荷和控制精度。
对码垛机器人关键零件进行有限元分析的主要目的在于让机器人在收到外在载荷作用下零件的强度以及刚度是否符合要求。使用有限元的方法对机器人的刚度及其强度的分析时,需要将模型进行合理的简化,然后适当的添加相应的约束,最后能够得到比较好的效果。同时,施加外在载荷就可以实现对应力以及应变情况进行合理的分析。本文主要堆机器人的大臂、小臂进行有限元分析。
1.整体结构设计
本文设计的码垛机器人主要的核心机构有支腿、舵机座、大臂、小臂、六爪、三脚架以及相应的辅助连杆,具有四个自由度,也就是拥有四个可以旋转的关节,这四个关节分别为支腿与舵机座之间、舵机座与大臂之间、大臂与小臂之间,以及腕部与末端(六爪)之间。码垛机器人总体机械结构如图2-1所示。
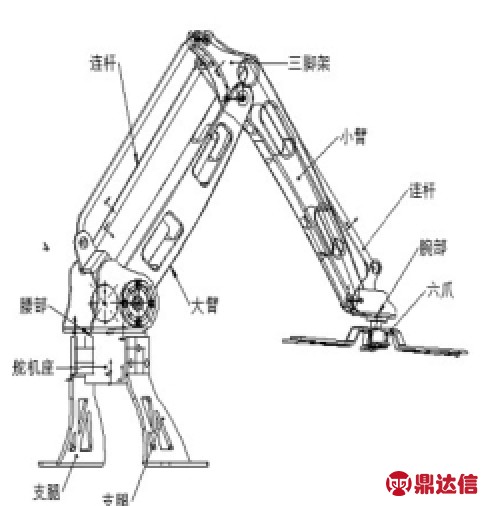
图2-1 码垛机器人总体机械结构
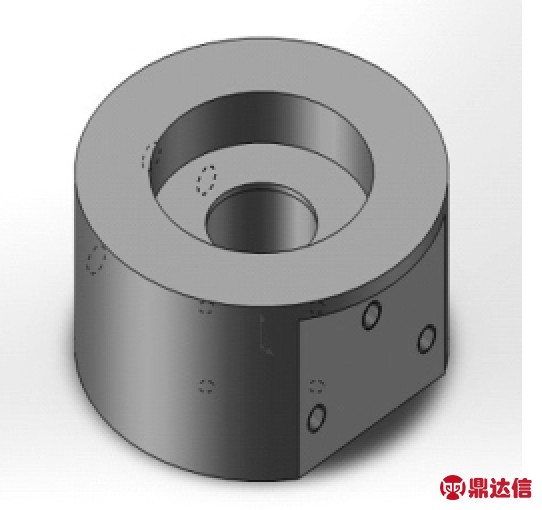
图2-2 机器人舵机座
(1)支腿是用来与地面进行固定的,承载了码垛机器人的大本分力量,也是连接舵机座的机构,所以要求要有较强的刚度、强度以及稳定性。
(2)舵机座处于大臂与支腿之间,主要承载着臂部重量,其上安装有大臂、小臂以及相应的辅助连杆。舵机座中安装有电机以及减速器,通过输出轴使得腰部旋转,整个机器人在腰部以上机构可以旋转作业,扩大了机器人的作业范围。舵机座的结构图如图2-2所示。
(3)大臂、小臂可以进行上下前后移动,通过减速器减速后直接带动实现机器人腕部在平面上回转运动。由上图可以看到,大臂与连杆、小臂与连杆都是形成平行四边形的装置,主要是用来增加臂部的刚性。大臂、小臂结构如图2-3所示。
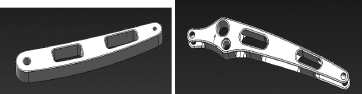
图2 -3机器人大臂、小臂
(4)机器人腕部是小臂与末端链接之间的部分,是轮系结构,主要带动机器人末端执行器在作业时姿态的调整。
(5)机器人末端直接与物件相关,主要是模仿人手的功能,实现对物件的抓取。
2.码垛机器人关键机构静力学分析
2.1 大臂静力学分析
首先,将SolidWorks中的大臂三维模型导入到Ansys Work⁃bench中去,定义材料属性,在设计中应用的是45号优质碳素钢,其弹性模量为2.09×1011N/m3,其密度为7.85×10-6kg/mm3,泊松比为0.269,然后进行网格划分,划分后的模型图。
2.2 小臂静力学分析
小臂主要的受力来源于末端物件的重量以及小臂自身的重量,小臂工程图如图5-7所示。1点和2点受到了小臂自身的重量以及物件对其拉力。再加上运动时出现的惯性力。所以我们去F1=8450N,F2=8450N。

图5 -8小臂应力图

图5 -9小臂应力图
图5 -10小臂总应变图
从上图可知,小臂的最大的应变量以及最大的应力都要远远小于45号优质碳素钢的对应值,而且最大的应变和应力均出现在小臂的下边缘,并不会影响工作精确度,所以是符合码垛机器人的刚度要求以及硬度问题。
2.3 码垛机器人销轴静力学分析
从动力学分析可知码垛机器人的主要力量施加在轴承上,小臂中轴主要承受的接触力有小臂以及末端物件施加的力,小臂后轴主要承受大臂连杆的拉力,大臂主轴则承受整个机器腰部以上的重力,水平座轴主要承受的是物价重量。下面本文将对上图所示销轴逐一分析。表5-1为各销轴所受的力。
3.总结
本文主要通过Solidworks软件对码垛机器人的三维模型设计,介绍了各个关键零件作用。然后对码垛机器人的关键零件有限元分析,这部分主要是在ANSYS Workbench中实现的。对码垛机器人的大臂、小臂以及四个关键受力的销轴进行了动力学分析,得到了相应的等效应力云图、等效应变云图以及总应变云图。


