
摘要:铝电解槽大修时阴极钢棒与爆炸块需要焊接,普通的手工焊接方法效率低、强度大、质量差。由于电解槽周围环境特殊,空间狭小,限制了自动化较高、焊接质量较好的焊接设备的使用。文中阐述了一种柔性输送机构可方便地将自动焊接机构输送到位,完成阴极钢棒与爆炸块的焊接,降低了工作强度,提高了工作效率。
关键词:铝电解槽大修;柔性输送机构;焊接设备
0引 言
目前国内外绝大多数铝电解槽阴极钢棒与爆炸焊片间均采用焊接方式实现连接,但是施焊处强大的磁场和狭小操作空间,使人工作业非常困难,不仅焊接工作效率低,而且焊接质量得不到保障,导致电解槽电流分布不均匀,使生产运行存在较大的安全隐患。为解决在强磁场下的可靠焊接和工作效率,近年来贵阳铝镁设计研究院有限公司提出了采用焊接机器人代替人工进行焊接的技术。
铝电解槽焊接机器人的开发不仅要解决强磁场对机械部件和焊接材料的影响,还要尽量小型化设计以适应狭小操作空间要求。而在电解系列狭小操作空间和复杂的现场环境中,如何配置机器人,使焊接机器人能在电解槽周稳定自由行走,对阴极钢棒与爆炸焊片间连接钢板进行焊接,是焊接机器人开发最基本的难题。该文针对这种特殊环境对特种焊接机器人的关键部位(也即是柔性输送机构)进行2种方案的研究。
1总体布置
铝电解槽大修特种焊接机器人由全向移动小车、柔性输送机构、自动送片及焊接机构组成。焊接机器人由全向移动小车沿着电解槽槽缘板运动,实现工位之间的转换。柔性输送机构的作用是把自动送片(连接薄钢板)及焊接机构输送到工作位置,完成焊接之后把焊接及送片机构输送到初始位置,设备整体布局见图1。
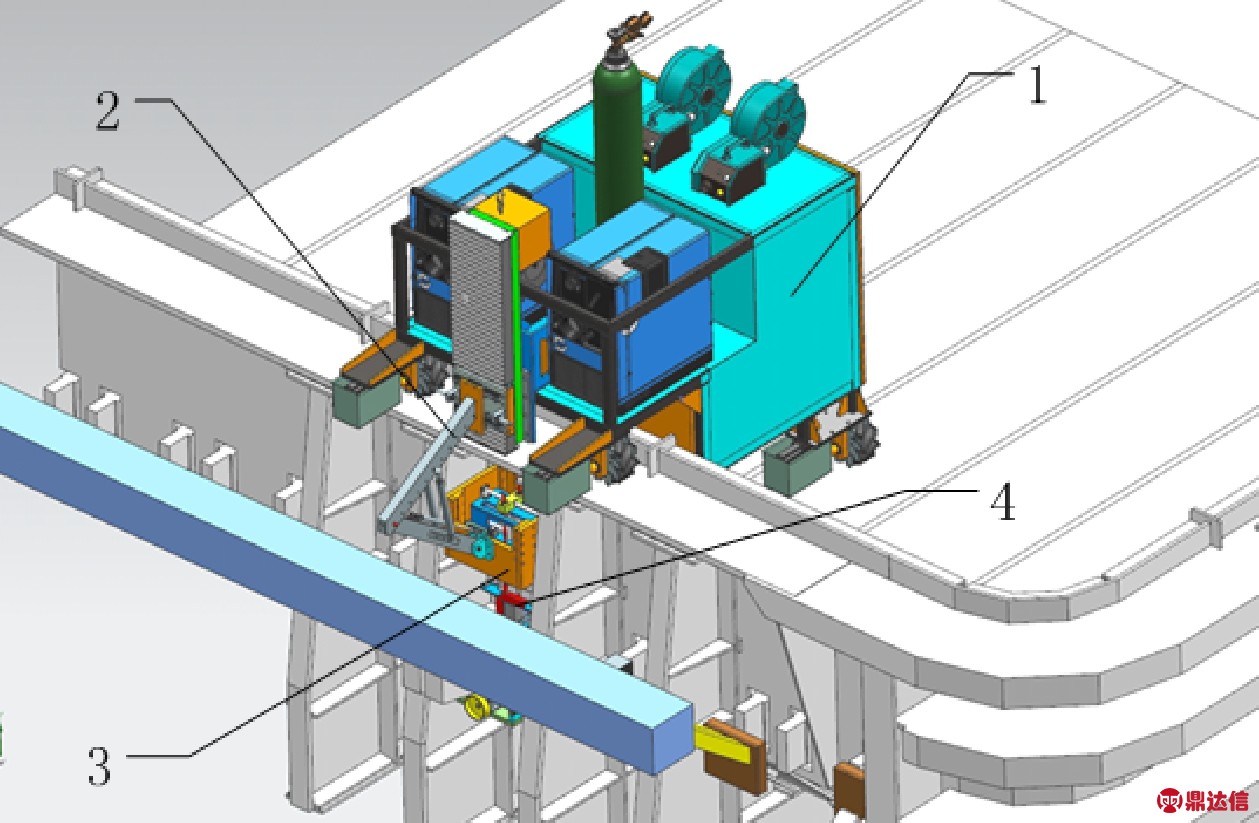
1.全向移动车;2.柔性输送机构;
3.自动送片与焊接机构;4.定位夹具
图1 设备布局
Fig.1 Equipment layout
2柔性输送机构的设计
根据焊接空间及范围的要求,柔性输送机构考虑具有6个自由度,见图2。机构可延X、Y、Z方向移动,其中Z轴行程600 mm,Y轴行程100 mm,X轴行程300 mm,A、B、C 3个旋转轴旋转角度分别为5°、45°、5°。
2.1带平衡器的柔性输送机构
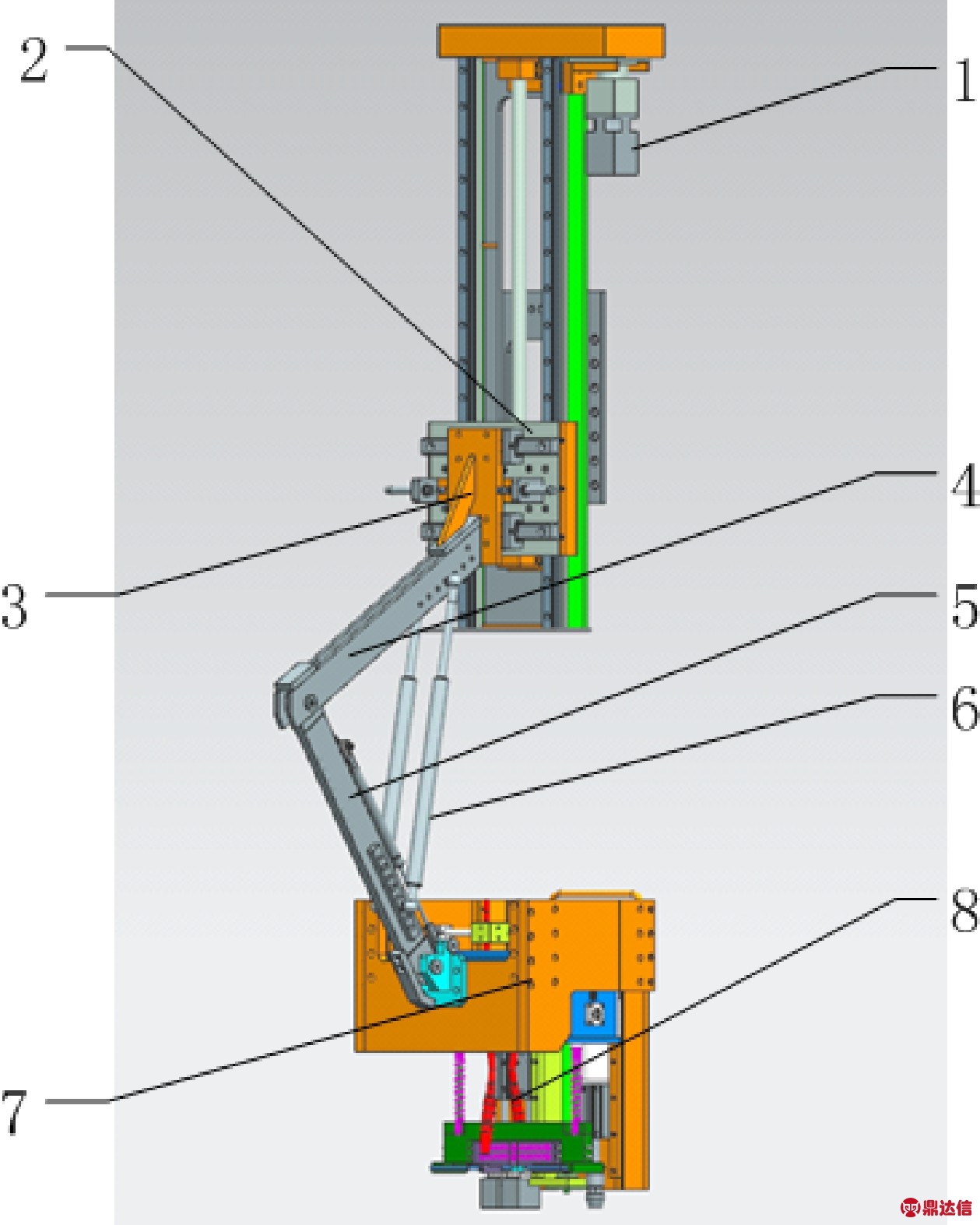
带平衡器的柔性输送机构由垂直移动溜板、水平移动溜板、吊架、连杆、气弹簧及平衡器等零部件组成,见图3。自动送片及焊接机构悬挂于连杆上,通过气弹簧和平衡器来平衡重量,处于悬浮状态,施加外力可以在行程范围内自由移动。自动送片及焊接机构与连杆之间的链接采用万向关节轴承的方式,其局部放大图见图4。
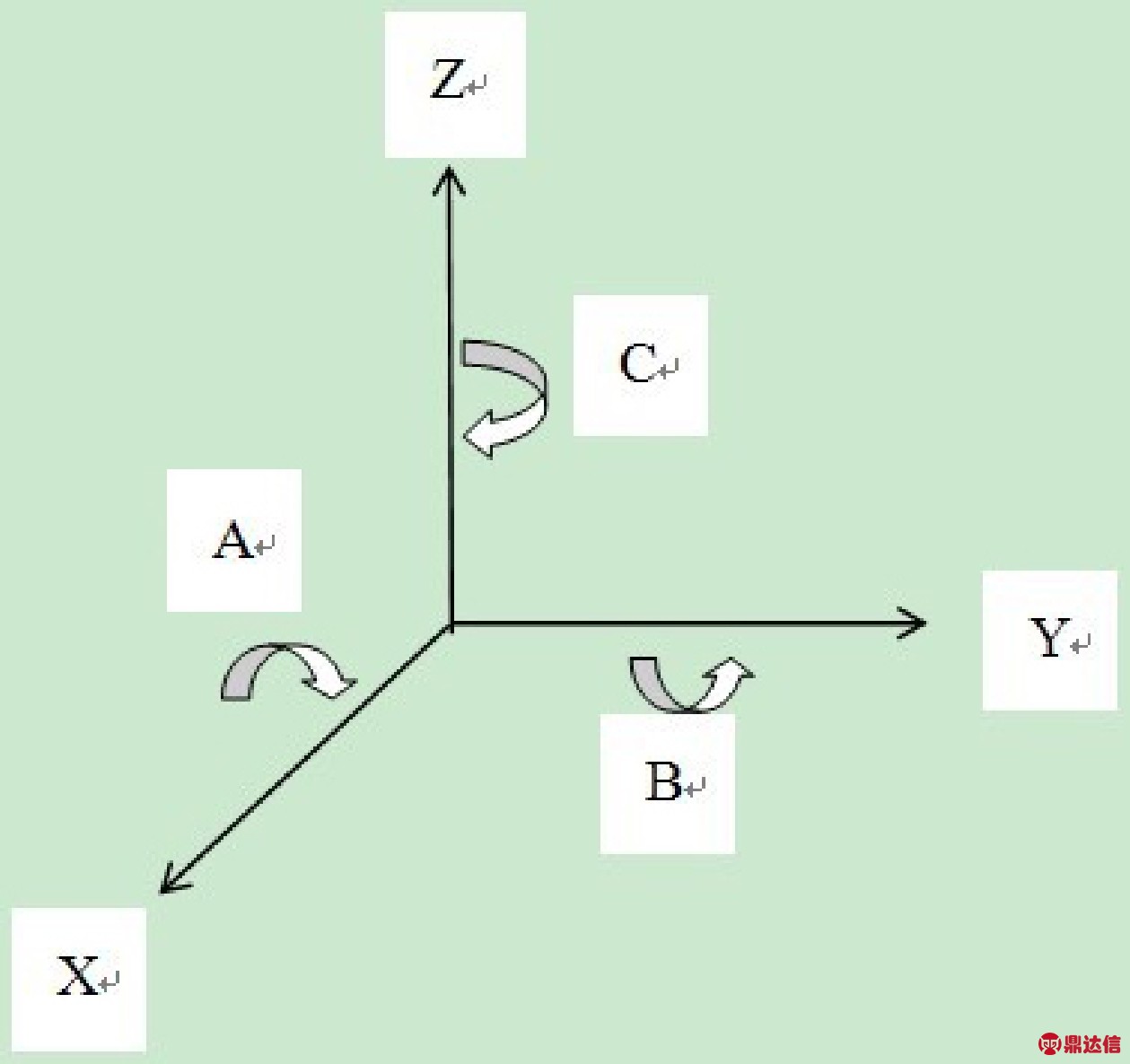
图2 柔性机构系统坐标系
Fig.2 Coordinate system of flexible mechanism
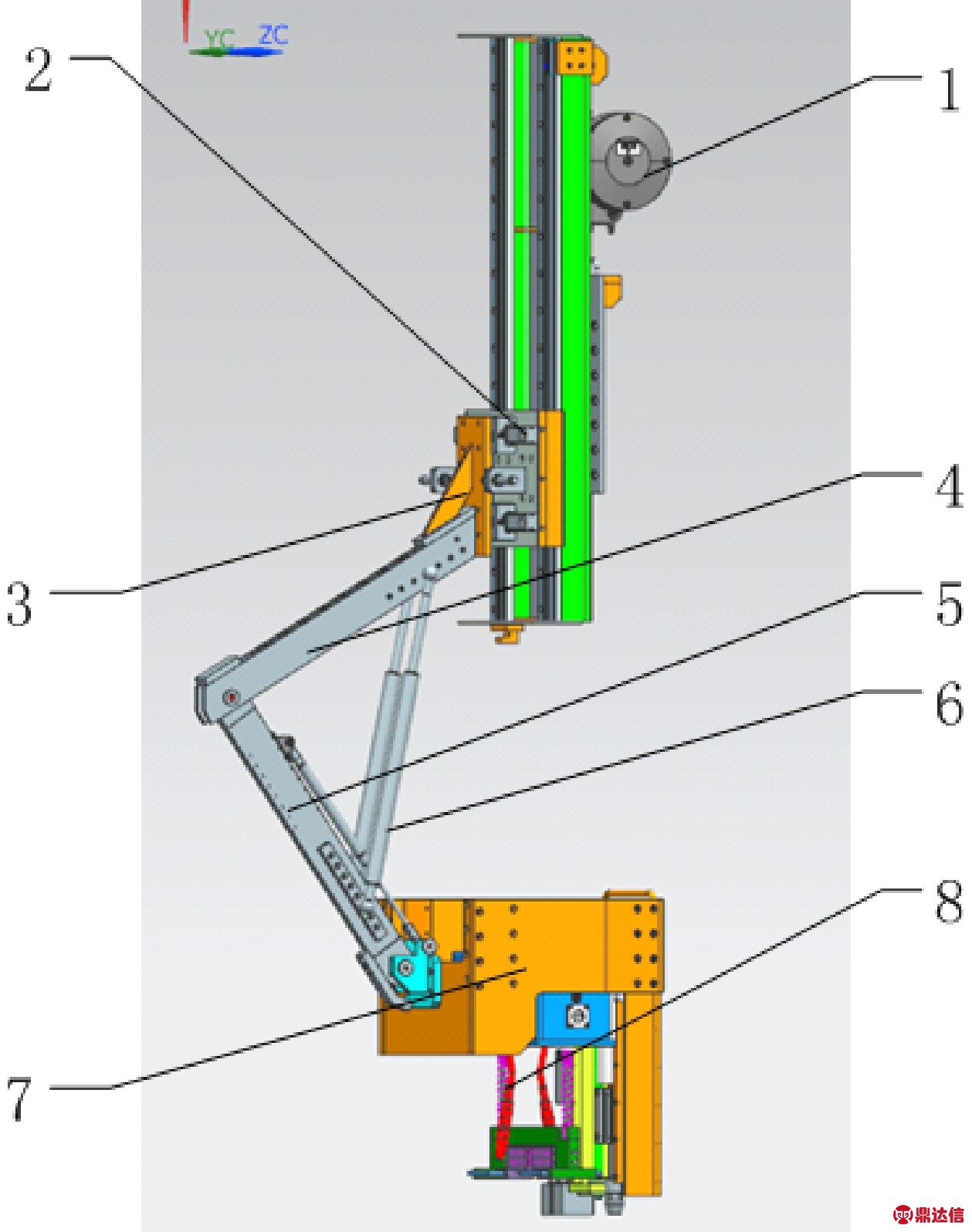
1.平衡器;2.垂直移动溜板;3.水平移动溜板;4.吊架;5.连杆;6.气弹簧;7.自动送片及焊接机构;8.气弹簧
图3 带平衡器的柔性输送机构组成图
Fig.3 Composition diagram of flexible transmission mechanism with balancer
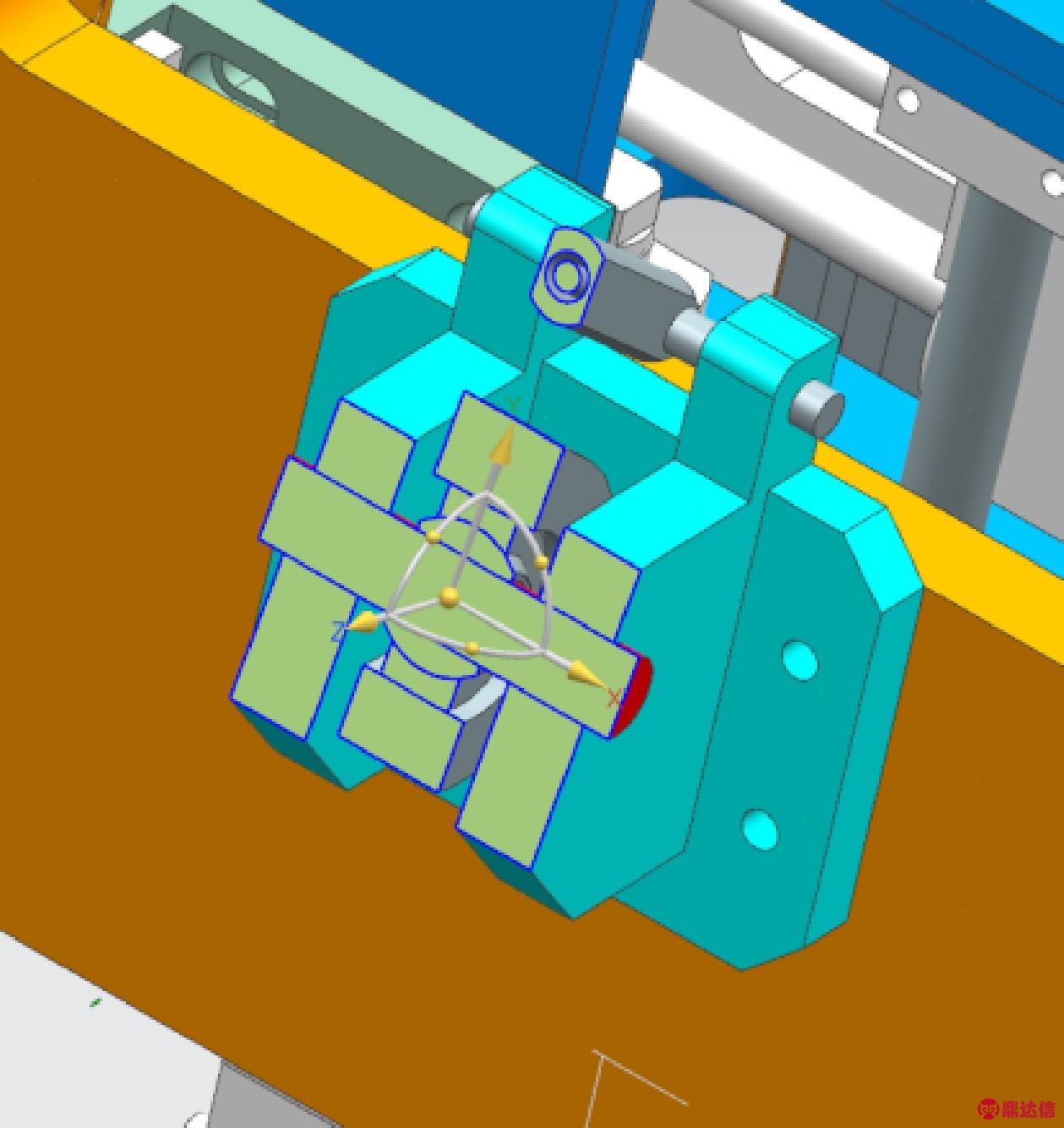
图4 万向关节轴承剖视放大
Fig.4 Visual magnification of universal joint bearing
2.2带伺服电机的柔性输送机构
带伺服电机的柔性输送机构Z轴方向的移动采用伺服电机驱动,X、Y轴方向采用气弹簧平衡,焊接机构悬挂在输送机构吊架上可延X、Y、Z方向移动。焊接及送片机构悬挂于吊架上,通过气弹簧来平衡重量,通过手动及电动的方式可以在行程范围内自由移动。带伺服电机的柔性输送机构见图5。
1.伺服电机;2.垂直移动溜板;3.水平移动溜板;4.吊架;5.连杆;6.气弹簧;7.自动送片及焊接机构;8.气弹簧
图5 带伺服电机的柔性输送机构组成图
Fig.5 Composition diagram of Flexible transmission mechanism with servo motor
2.3气弹簧力学性能
气弹簧[1-3]的力学性能是气弹簧的重要指标,该输送机构选用的气弹簧是艾习易(ACE)标准拉伸气弹簧,气弹簧的行程为350 mm,在行程围范10~340 mm范内拉伸,拉力波动20 %,见图6。
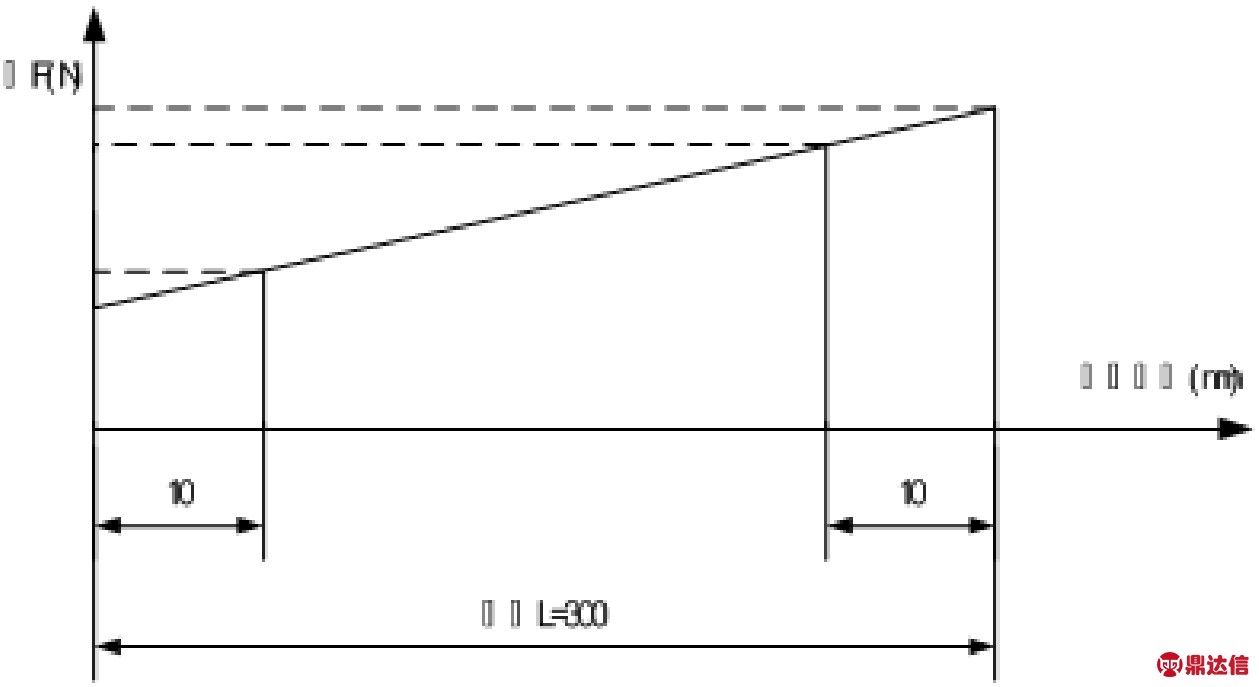
图6 气弹簧力位移曲线示意图
Fig.6 Gas spring force displacement curve
3输送机构受力分析及计算
输送机构把自动焊接及送片机构输送到工作位后处于平衡状态,图7为输送机构输送到位后的状态,假定连杆AB绕A点转动,负载重力位于B点(负载重力G=350 N),气弹簧连接C、D两点之间,气弹簧所需要拉力为F3。重力垂直于杆AB的分力为F1,气弹簧垂直于杆AB的分力为F2。通过几何作图及力的平衡关系得
lAC F1 - lAB F2 =0 (1)
式中:lAC=355 mm; lAB=530 mm; F1=G cos 36°; F2=F3cos27°
通过计算得出F3=470 N,F3在气弹簧拉力调整范围内(所选气弹为ACE GZ-28-VA,行程为300 mm,拉力可调整范围为150~1200 N,工作温度为80 C°)
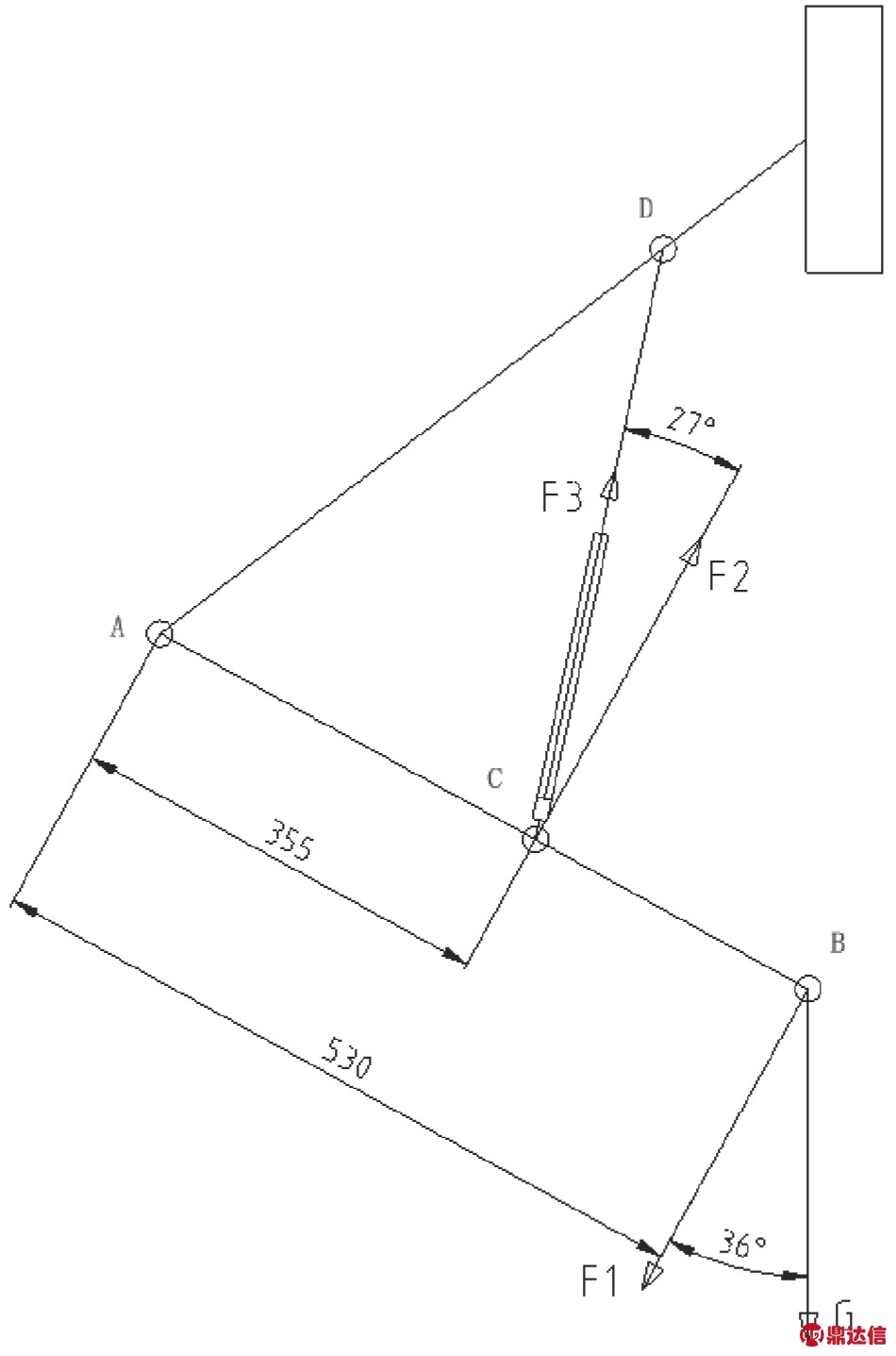
图7 平衡状态受力分析示意图
Fig.7 Sketch of force analysis in equilibrium state
4结 语
柔性输送机构是基于气弹簧的一种省力装置,依靠手动及电动的方式来输送自动焊接机构到工作位置,大大降低了劳动强度,其特点是结构紧凑、操作方便、输送灵活。为铝电解特种焊接机器人的研发奠定了基础。


