
[摘要]针对软地面恶劣复杂环境下车辆通过性差的问题,本文对一种新型的气垫靴式步行车的行走机构,进行方案设计;对该步行车的工作原理及行走机构其特点进行了描述,并对一些典型的行驶工况进行了行走机构步态规划。最后,对该气垫靴式步行车的驱动行走机构进行了方案设计和分析。
关键词:软路面 气垫靴式步行车 步态规划 行走驱动机构
0 前言
车辆在沼泽、滩涂、湿地等湿软路面条件下的稳定性和通过性,一直是车辆动力学及其控制领域的难点之一[1]。这类地面的典型特点是环境复杂、承载能力低、且不平坦,使得常规车辆可能出现打滑、下陷的现象或者甚至根本无法通过。为了提高车辆在该类型路面下的通过性,国内外很多学者研制了不同类型的行走机构和特种车辆,主要包括:多轮宽轮车辆、履带式车辆、气垫车辆等[2-4]。该类型车辆的研制,对此类湿软不平坦地面的资源勘探及开发、科考、军事以及抢险的特殊要求,有着极其重要的意义。
1 整车方案设计
前人研究表明:普通的轮式车辆和履带车辆在一般湿软路面上具有速度快,效率高的优势,而在湿软程度较高的路面,却显得通过性较差;相对而言,普通的气垫车辆,虽然可以在一定程度上有效地解决湿软路面车辆的通过性,但是其对不平坦地面的仿形能力,对环境的自适应能力及越障能力较差,也不能很好地满足要求。而机器人中的腿式独立行走机构能够最大限度提高越障能力,对坎坷不平的地面环境具有更强的适应性,非常适合在地形复杂的环境下运动[5]。因此,针对湿软地面的作业车辆接地压强要求低、作业工况复杂多变等特点,在结合气垫和移动机器人技术的基础上,本文创新性地设计了一种新型气垫靴式步行车,旨在有效降低车辆对地面的接触压强的同时,提高车辆的仿形通过能力。其设计方案及工作原理由图1所示。
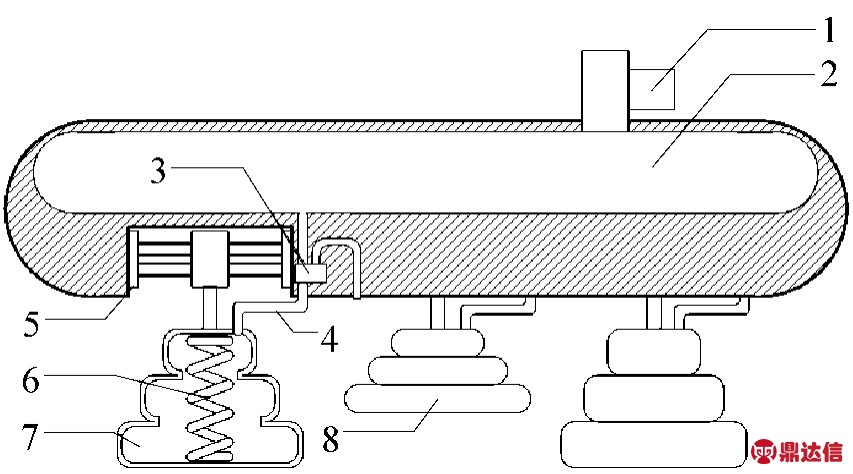
图1 原理示意图
Fig.1 Schematic diagram
1-空压机及控制电机 2-高压气室 3-电磁阀 4-气道 5-气垫靴纵向驱动机构 6-弹簧(拉伸状态) 7-气垫靴(充气状态) 8-气垫靴(放气状态)
1-Air compressor and control motor 2-High pressure gas cell 3-Magnetic valve 4-Air lane 5-Air cushion boots longitudinal driving mechanism 6-Spring(tension state) 7-Air Cushion boots(aeration state) 8-Air cushion boots(air release state)
在该方案设计中,步行机构由六个类似于空气弹簧、气压独立可控的气垫靴(7-为落靴时的进气状态;8-为抬靴时的放气状态)组成,并纵向对称分布于车体下方的左右两侧。车体内密闭的高压气室2,其压强由空压机及驱动电机1根据设计的控制算法保持在某一适当状态。通过气道4连接,六个三相电磁阀3(图2所示)分别相应控制每一气垫靴,通过相位的控制以实现气垫靴的保持、充气和放气状态(其中相位一为封闭状态、相位二为连通气垫靴和高压气室、相位三为气垫靴连通大气)。当电磁阀处于相位二时,高压气源将向气垫靴充气,通过伸张气垫靴来实现其落靴动作;当电磁阀处于相位三时,由于气垫靴内拉簧作用,使靴内气体排出以实现抬靴动作;当气垫靴完成预定动作后,电磁阀回归到相位一,气垫靴保持气压并足以支撑车体重量。此外,也可考虑增设一个车载减压室,同时将三相电磁阀改为四相,使第四相为气垫靴与减压气室的连通状态,以保证在特殊工况(如草地足受限的情况下)气垫靴仍具有足够的抬靴(拔靴)动力。最后,整车采用合理的步态规划控制算法,并保证各足间的互相配合和协调运动,以及行走驱动机构驱动气垫靴就能实现车辆的前进运动。综合来说,该步行车具有以下特点:
(1)有与地面相接触的行走装置,与全垫升气垫车相比,有更加优秀的爬坡能力,消除了对风敏感以至于易产生滑移、侧漂等问题,行驶更稳定,能耗更小。
(2)应用了较为成熟的机器人行走技术,与传统的混合式气垫车相比,有更强的仿形和越障能力,在软路面上承载能力更强,硬路面上行驶平顺性更佳。
(3)以类似于空气弹簧的靴式气垫足为核心的行走机构使得车辆的抗振能力得到大大提升,并可以通过对气垫足“刚度”的控制调节载荷分配,增强了车辆对复杂路面的适应能力。
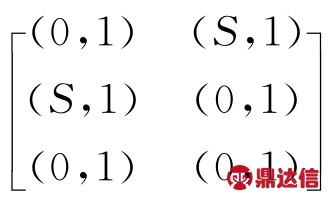
图2 三相电磁阀原理图
Fig.2 The three phases magnetic valve schematic diagram
A-连接高压气源 B-连接气垫足 C-直接连接大气
A-Connecting nighpressure air source B-Connecting air cushion foot C-Connecting air directly
2 步态规划设计
步态规划是实现车辆步行的关键之一,为达到较为理想的步行,需要考虑下列要求:(a)步行平稳、协调,进退自如,较小的左右摇晃及前后冲击;(b)机体和地面间没有较大的冲击,特别是在气垫足着地时,与地面接触为软着陆;(c)机体保持与地面平行,且始终以等高运动,没有明显的上下波动。对于本步行车而言,普遍的行走方式可以采用三角步态式的步行方式,然而在过于松软的路面上行走时,普通的三足行走的方案不足以满足其不下陷的要求[6]。则此时,则采用特殊的五足支撑方案进行行走,此外还模拟了一种特殊的越障工况。
首先,在进行步态设计和步态分析之前,需要做以下假设:
(1)车辆行驶速度足够慢,且纵向驱动系统的状态只分为匀速前进、匀速后退和保持这三种状态,而忽略其启动/制动时的加速/减速过程。
(2)将纵向驱动系统的前进/后退速度设定为t0秒钟完成一个步长S米。
(3)尽管真实的气垫靴充放气过程为复杂的流体动力学变化过程,并与实际设计车辆结构直接相关,为简化分析,我们在此假设气垫靴能够在t1秒内完成一次充气或者放气过程。
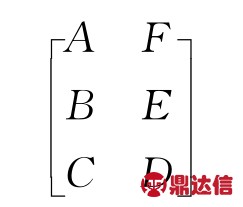
其次,需要定义编号以方便描述气垫靴的步态规划设计过程,具体编号如车辆俯视图3所示。
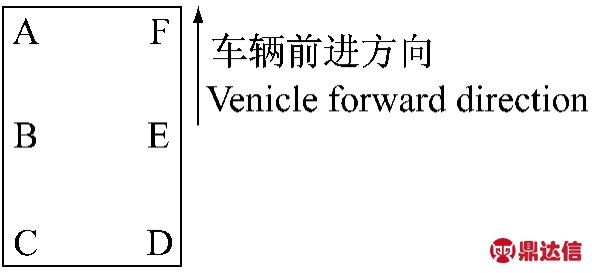
图3 各靴编号示意图
Fig.3 Each boots numbering scheme
这里,我们可以采用一个二维的数组来表示每个气垫靴的状态,其中第一个元素表示气垫靴纵向坐标,以每个靴后退能达到的最大位移作为该靴的原点,以前进方向为正方向。第二个元素表示气垫靴充放气状态,1表示充气完毕或者已落下,0表示放气完毕或者已抬起。比如图2中最左边的气垫靴,其状态为(S/2,1)。
同样,采用一个3×2的矩阵来表示车辆整体状态,其中每个矩阵元素代表的相应的气垫靴,其编号矩阵为:
按照以上定义,在车辆的初始状态下,每个靴相应的初始状态均为(0,1)。
2.1 普通工况下的三角步态设计
三角步态是六足机器人最常采用的设计,即其中的两组腿(车体一侧的前足、后足与另一侧的中足)处于支撑三角形上,且三足的动作相同,均处于摆动相或均处于支撑相。六足纲昆虫(蟑螂或蚂蚁等)在平坦无阻的地面上快速行进时,多以交替的三角步态运动[7]。三角步态的如图4所示:
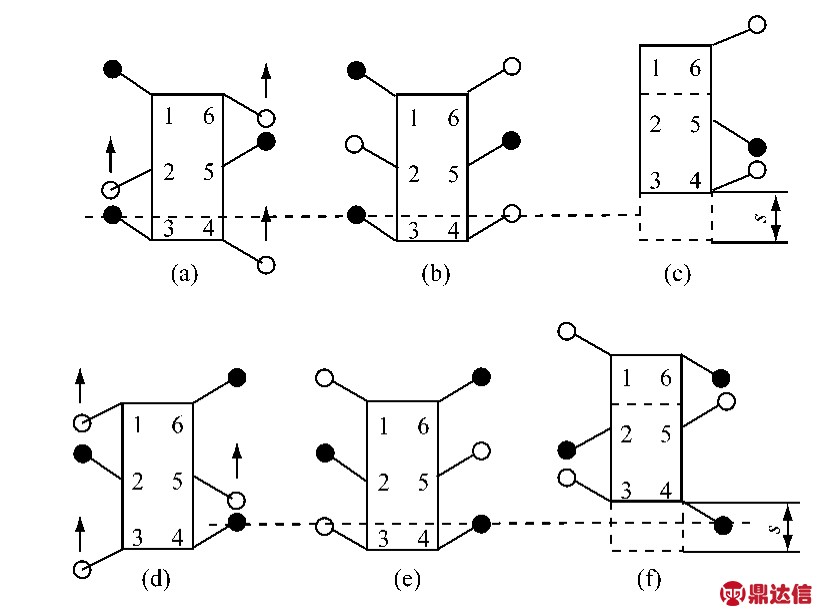
图4 六足纲昆虫三角步态示意图
Fig.4 The six feet class insect triangle guit scheme
对于本文设计的六足气垫靴步行车而言,可以选择在普通工况下采用三角步态式的步行方式,在保证车辆具有较快前进速度的同时,可使车辆重心保持在较大的三角形支撑范围内,以获得较高的行驶稳定性。所设计的三角步态具体描述如下:
(1)初始状态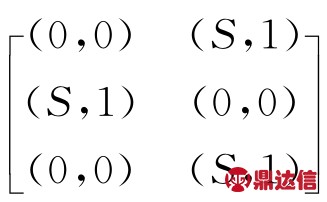
(2)B,D,F抬靴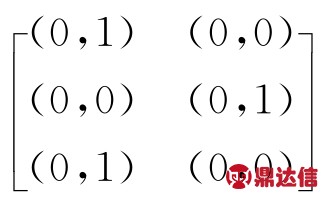
(3)B,D,F前进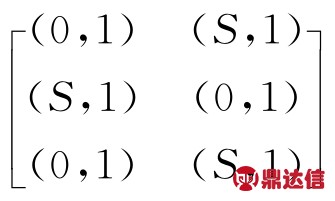
(4)B,D,F落靴
(5)A,C,E抬靴
(6)A,C,E前进
(7)A,C,E落靴
(8)A,B,C,D,E,F一起后退,靴不动、车前进,六足回到初始状态,即:
按照(1)—(8)的顺序完成一个循环,其所花的时间为t1+t0+t1+t1+t0+t1+t0=3t0+4t1 秒,车辆前进了S米,即车辆的前进速度为S/(3t0+4t1)m/s。所设计的气垫车三角步态一个循环过程由图5清晰地描述如下:

图5 靴式气垫车三角步态示意图
Fig.5 The boots air cushion vehicle triangle guit scheme
2.2 恶劣工况下的五足支撑步态设计
若考虑某些更恶劣的、承载能力更低的地面,需要更小的接地比压来保证车辆的通过性。此时,可采用多于三足、甚至五足接地的步态方案设计。其具体的步态设计方案描述如下:
(1)初始状态
(2)F抬靴
(3)F前进
(4)F落靴
(5)B抬靴
(6)B前进
(7)B落靴
(8)D抬靴
(9)D前进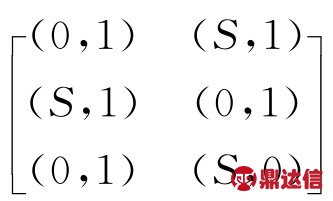
(10)D落靴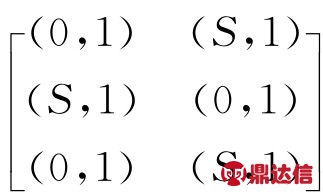
(11)-(13)A抬靴前进落靴,
(14)-(16)E抬靴前进落靴,
(17)-(20)C抬靴前进落靴
(21)车辆前进步长S
采用该步态方案时,车辆前进一个步长所需时间为(t1+t0+t1)*6+t0=7t0+12t1秒,可见会大大降低车辆行走速度,明显超出三角步态所用的时间,但是对保证车辆行走稳定性具有重要的意义。
2.3 越障步态模拟
在车辆行驶过程中,可能会遇到一些障碍物,这时需要通过控制算法进行步态的实时控制,以保证车辆越障。在越障模拟中,本文给出一个典型的步态控制过程。首先假设车辆右侧有一个与气垫靴投影面积相同、高度为其工作行程二分之一的障碍物,模拟车辆越障过程如图6所示。
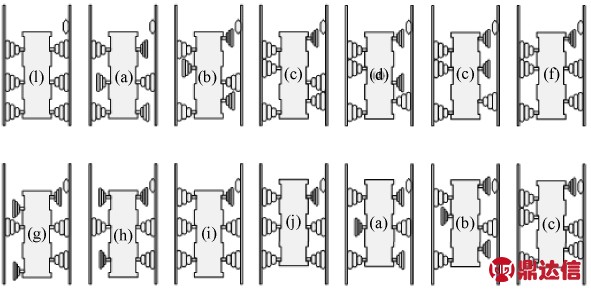
图6 靴式气垫车越障步态模拟
Fig.6 The boots air cushion vehicle overpass obstacle guit simulation
由上图可见,其中(1)状态为初始状态,(a)、(b)两个状态仍保持了三角步态的前进方式,而(c)-(j)是在保证靴F不落地和车辆重心的情况下实时演算而成的步态,到了(j)状态车辆前进一个步长,接着开始(a)状态,然后进行(a)-(j)循环,直至靴 F完全跨过障碍物。此时,靴E的步态就会被重新规划,最后规划的是靴D,直至车辆完全越过障碍物,车辆重新进入三角步态。可见,按照所设计的步态组合控制,车辆可顺利地完成越障。
3 行走驱动机构设计研究
该步行车的行走驱动机构主要由动力源、动力传递装置、最末端的气垫足及辅助装置所组成。本文选择了滚珠丝杆机构以实现气垫靴与车体间的相对运动[8]。图7所示的就是机构的三维模型,其中主要包括了伺服电机,滑块,滚珠丝杆与导轨。
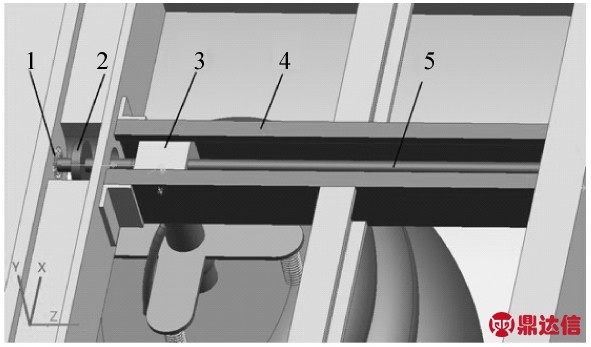
图7 行走驱动机构三维模型图
Fig.7 The walking mechanism 3Dmodel diagram
1-轴承 2-伺服电机相连的齿轮 3-滑块 4-导轨 5-滚珠丝杠
1-Bearing 2-Servomotor connecting gear 3-Slide block 4-Slide 5-Ballscrew
3.1 动力源设计
本设计采用伺服电机作为驱动源,同时采用六个电机独立驱动。电机的优点在于其不需要体积庞大,结构复杂的动力转换机构,也不会造成额外的冲击和振动。同时,对于控制技术而言,电机的响应速度较快。而选用伺服电机而非步进电机,是由于对于气垫车辆而言,其需要承受很大的载荷,故需要较大的扭矩来驱动车辆。伺服电机相比于步进电机而言,更易输出较大的扭矩,尽管其控制精度要弱于步进电机,但是就气垫车辆的控制要求而言,伺服电机的响应时间已经完全足够,故采用伺服电机作为驱动源。
同时,采用六个电机独立控制,可以使得气垫车的六个气垫足得到不同的速度,更好的满足转向等工况的具体要求。同时,由于气垫车在松软路面上行驶的,所以极易遇到复杂的土壤状况,此时,采用六个电机独立控制的控制方案就可以得到五足同时支撑的行走方案,确保车辆行走的稳定性,所以采用六电机分立控制。
3.2 传动系统设计
本设计采用滚珠丝杆与辅助导轨的传动方案,相比于其他方案,其主要的优点在于其运动精度高,工作平稳,尺寸紧凑,可传递较大轴向力。同时,在此附加滚珠螺旋,大大提高了其传动效率,使得螺纹不易磨损。由于本车的设计目标为一个低速重载的车辆,故在这里增加了导轨的机构,用以承受车身较大质量的载荷,增加整个系统的强度。而滑块的机构设计如图8所示。具体原理为:部件1中间打孔,孔中有内螺纹,丝杆从中穿过。部件2为滑块的外壳,安装于图7的滑槽中。3为滑块内的滑槽,使得部件1可以在滑块内部上下自由移动。此结构的设计目的在于将水平力和竖直力彻底分离。气垫足在水平运动时,滑块内滑槽3的存在使部件1可以上下自由运动,使得丝杆只承受水平方向的力,竖直方向的力大都由滑槽7承受,这样可大大减少工作时丝杆的变形,减小运动阻力,并且延长了丝杆的寿命。
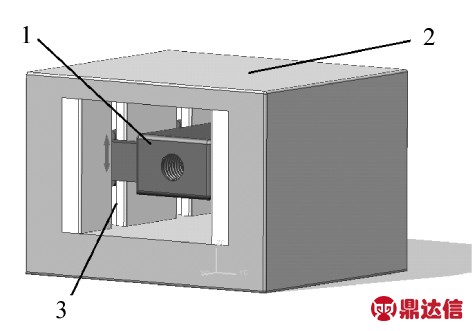
图8 滑块的内部结构图
Fig.8 The internal structure of the slide block diagrem
3.3 气垫足的设计
本设计中的垫升系统与传统意义上的垫升系统有所不同,其是由风机,增压气室,减压气室与气垫足所组成的。气垫足主要有两个部分组成:气垫与辅助稳定装置。
本设计中气垫足(如图9所示)有六个,结构相同,每侧三个,对称设置于车体的两侧。由于气垫足是保证气垫车通过性的重要部件,故需保证足够的底面积来减小地面比压,以防止地面的沉降,在拥有足够的底面积的条件下,尽可能的设计的比较小,可以减少风机的充气时间,从而减少风机的功率消耗。气垫足设计为三层主要考虑有三点,其一是通过上小下大的设计,可以尽可能的减少风机的充气时间,减少功耗。其次是通过三层的一个设计,借鉴了空气弹簧的结构,使气垫足可以完成其自适应,是气垫车运行时尽可能的保持姿态的稳定。再次,使用三层气垫可以使整个气垫足的高度上升,保证了此车有良好的几何通过性。鉴于此设计,故在三层气垫之间需要增加卡环,以防止气垫的外扩。
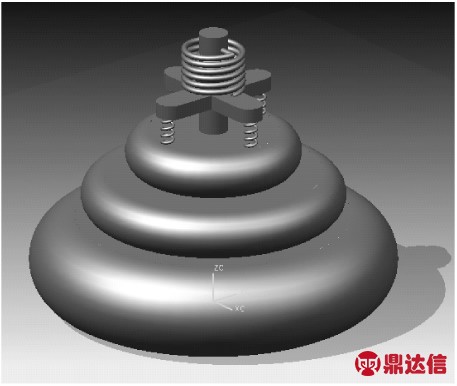
图9 气垫足的模型
Fig.9 The air cushion foot model
对于辅助稳定装置,其主要作用为保证气垫车在不同的行驶工况下可以正常运行。辅助稳定装置分别与车体和驱动电机相连,气垫与辅助稳定装置相连。辅助稳定装置包括腿部杆件、弹簧与球铰,球铰设置于腿部杆件和气垫之间。球铰是整个稳定装置设计的核心,其能够让气垫对于不同的地面有较好的适应性,使得气垫足可以上坡行驶,辅以十字稳定装置使得气垫车可以在有一定坡度的路面上保持其姿态的稳定。腿部杆件的端部垂直设有两根相互交叉固定的支撑杆(十字稳定装置),其垂足是两根支撑杆的交叉点,弹簧的一端和支撑杆的末端相连,另一端和气垫相连,弹簧在气垫抬起时,能够保持气垫的水平状态。当车辆要转向时,运用差速转向的原理,在气垫足静止的情况下,通过丝杆上机构运动速度的不同,使得车身先行转向,随后再通过扭簧将气垫足的姿态进行调整,所以辅助稳定机构帮助气垫车在不同的工况下可以正常工作。
5 结论
常规车辆在软湿地面上(如滩涂、沼泽地等)行驶时,会存在行驶机构下陷深、阻力大、滑转严重甚至根本无法工作的问题,气垫控制技术一直是一种有效的解决手段。在对前人研究的基础上,我们创新性地提出了一种气垫靴式步行车。该气垫靴式步行车由六个独立可控的气垫靴及其驱动系统构成。我们通过整车方案设计、工作原理分析、步态规划及模拟,对所提出的方案合理性和可行性进行了研究,最后对车辆的行走驱动机构的进行了设计,初步达到研究的预期目的。


