
摘要:在综合分析滚柱直线导轨副动态摩擦力测量系统功能及定位的基础上开发其测量系统,包括软件及硬件组成、数据采集与分析系统等。基于此测量系统对滚柱直线导轨副动态摩擦力进行试验分析,在试验过程中发现造成某型号导轨滑块摩擦力波动的原因,并针对此现象提出改进方法,为高性能滚柱直线导轨副的生产提供帮助。
关键词:滚柱直线导轨副;动态测量;摩擦力波动;试验分析
0 引言
滚柱直线导轨副是数控机床的关键功能部件,目前已在精密机床、自动化设备、重切削加工设备等方面得到广泛的应用[1]。滚柱直线导轨副以滚柱为滚动体,因而具有超高刚性与超重负荷能力,这就决定了其高速、重载的发展方向[2]。在滚柱直线导轨副的高速、重载运行中,其温升、噪声、振动等性能指标会产生大的变动[3]。而摩擦作为能量消耗的主要方式,是影响滚柱直线导轨副各性能指标的重要因素[4]。针对这种情况,研究滚柱直线导轨副的摩擦力特性是必不可少的。本文通过总结前人的研究成果,开发了摩擦力动态测量系统,同时通过分析总结测量的数据,发现造成滚柱直线导轨副摩擦力波动的原因。针对这种现象进行了大量的试验验证,为进一步改善滚柱直线导轨副的性能提供了可行性依据。
1 测量系统总体方案设计
本测量系统包括机械系统、测控系统两大部分。其中机械系统结构如图1所示。
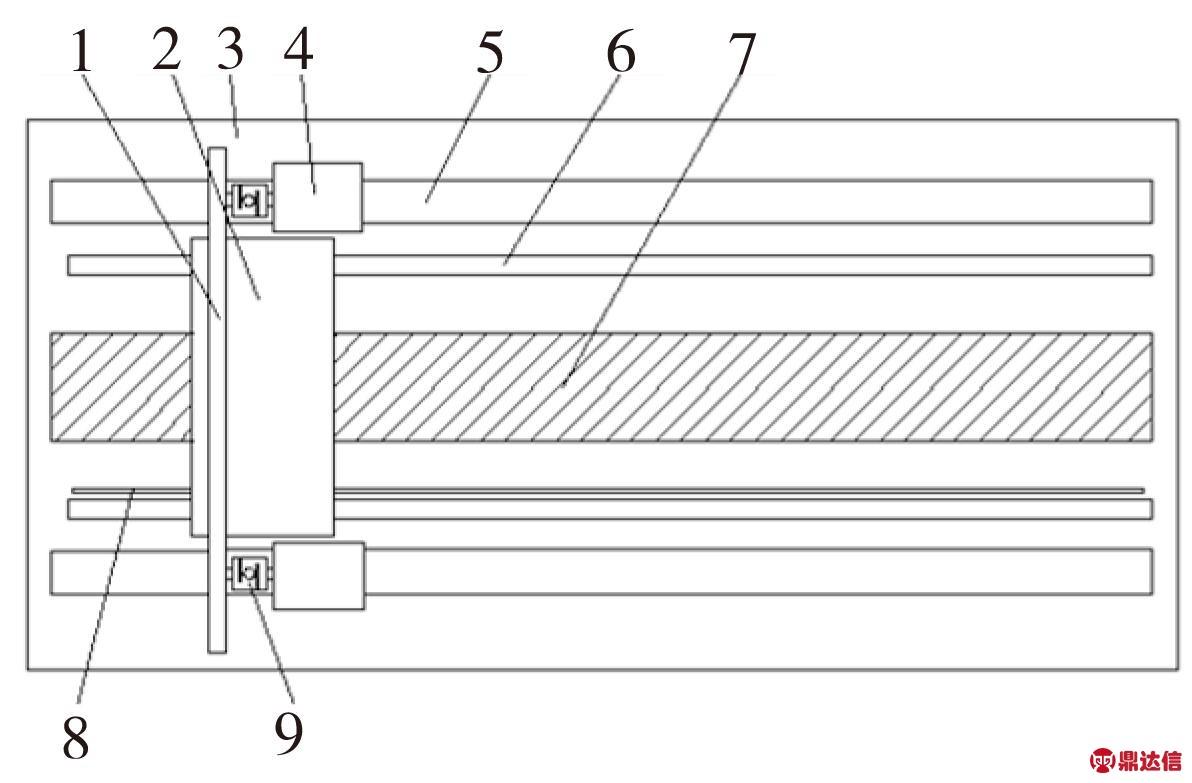
1.联接板 2.直线电机滑台 3.试验台床身 4.被测导轨滑块 5.被测导轨 6.高速静音导轨 7.直线电机磁轨 8 光栅尺 9.拉压式称重传感器
图1 机械系统结构图
机械驱动系统采用直线电机驱动的方式,驱动行程可达到3000mm。采用直线电机驱动,主要是考虑到直线导轨高速度、高加速度的工作环境,以及长行程、高精度的运动要求,同时相比于传统的滚珠丝杠驱动方法,可以实现“零传动”,传动刚度更高、推力更平稳[5-7]。
测控系统主要由工控机、运动控制卡、PCI数据采集卡、拉压式称重传感器、称重传感器测量仪表等组成,其组成如图2所示。工控机通过运动控制卡控制直线电机的往复运动,试验台装有光栅尺,可以实时反馈运动位置,称重传感器仪表负责采集称重传感器数据并传送至工控机。
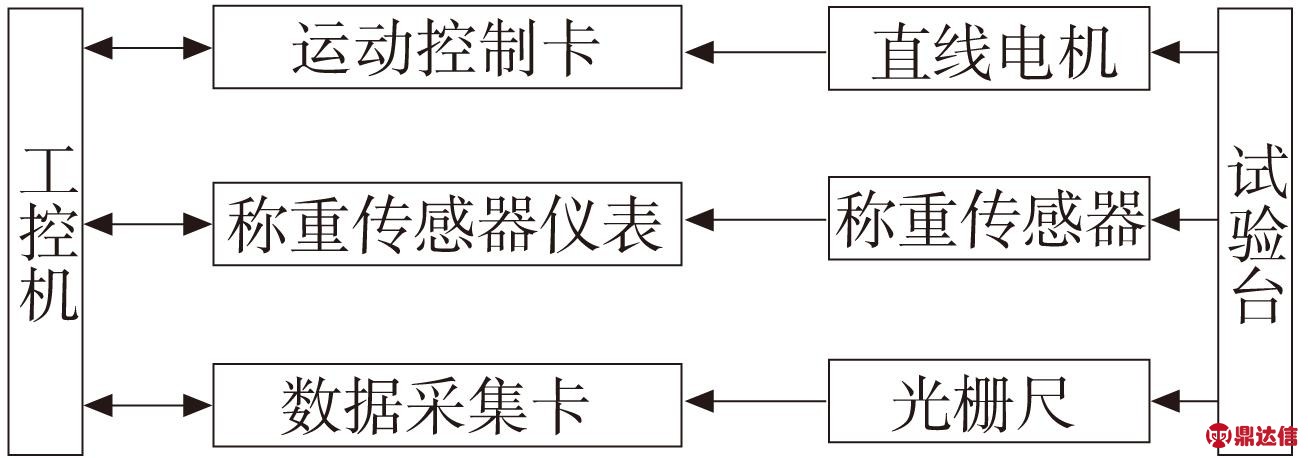
图2 测控系统组成图
本测量系统的工作原理是由直线电机驱动被测导轨的滑块进行直线往复运动,直线电机滑台上固定有联接板,联接板通过称重传感器与滑块相连,当直线电机做匀速运动时,称重传感器所测得的数据就是被测滑块的实时摩擦力[8]。
2 测控系统软件设计
本测控系统软件以Labview编写,采用程序框图结构,通过相应的硬件驱动提供的动态链接库函数及VISA驱动对相关仪器进行操作。VISA驱动是仪器编程中的标准I/O API,可以控制串口、以太网等,并根据使用仪器的类型调用相应的驱动程序,本系统中主要用来通过串口对摩擦力进行读取操作[9]。软件主界面如图3所示。
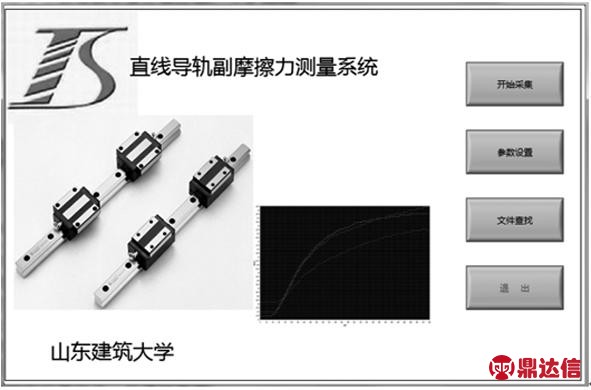
图3 测控软件主界面图
软件相关的操作包括:
(1)直线电机的运行控制。包括直线电机的运行速度大小的控制,直线电机行程的控制,直线电机往复运动的控制
(2)光栅尺位置信号的采集处理。采用PCI计数卡,采集光栅尺脉冲信号,并进行转换,转换为相应的位置信号,反馈给直线电机控制系统。
(3)摩擦力信号的采集处理。摩擦力信号经称重传感器仪表低通滤波、放大、A/D转换后,通过串口基于RS232通讯协议传送至工控机,为保证采集数据的准确性,在工控机端软件上再对数据进行递推平均滤波,消除干扰信号的影响[10]。
采集完成的数据可以通过软件进行存取操作,并生成检测报表后打印。
3 数据采集与分析
完成相应的软硬件安装调试后开始对被测导轨副进行摩擦力测量。本试验对象采用某型号的45滚柱直线导轨副,被测导轨副安装完成后先进行初期跑合,跑合完成后再进行动态摩擦力测量。进行摩擦力测量时应注意导轨副的润滑情况,避免润滑不良引起的摩擦力过大现象。
在直线电机分别以6m/min、12m/min的速度运行时测量其摩擦力动态信号,现取一侧导轨副的摩擦力信号进行分析,如图4和图5所示。其中软件设置读取频率为20Hz,横坐标已转换为滑块运行时位置坐标。
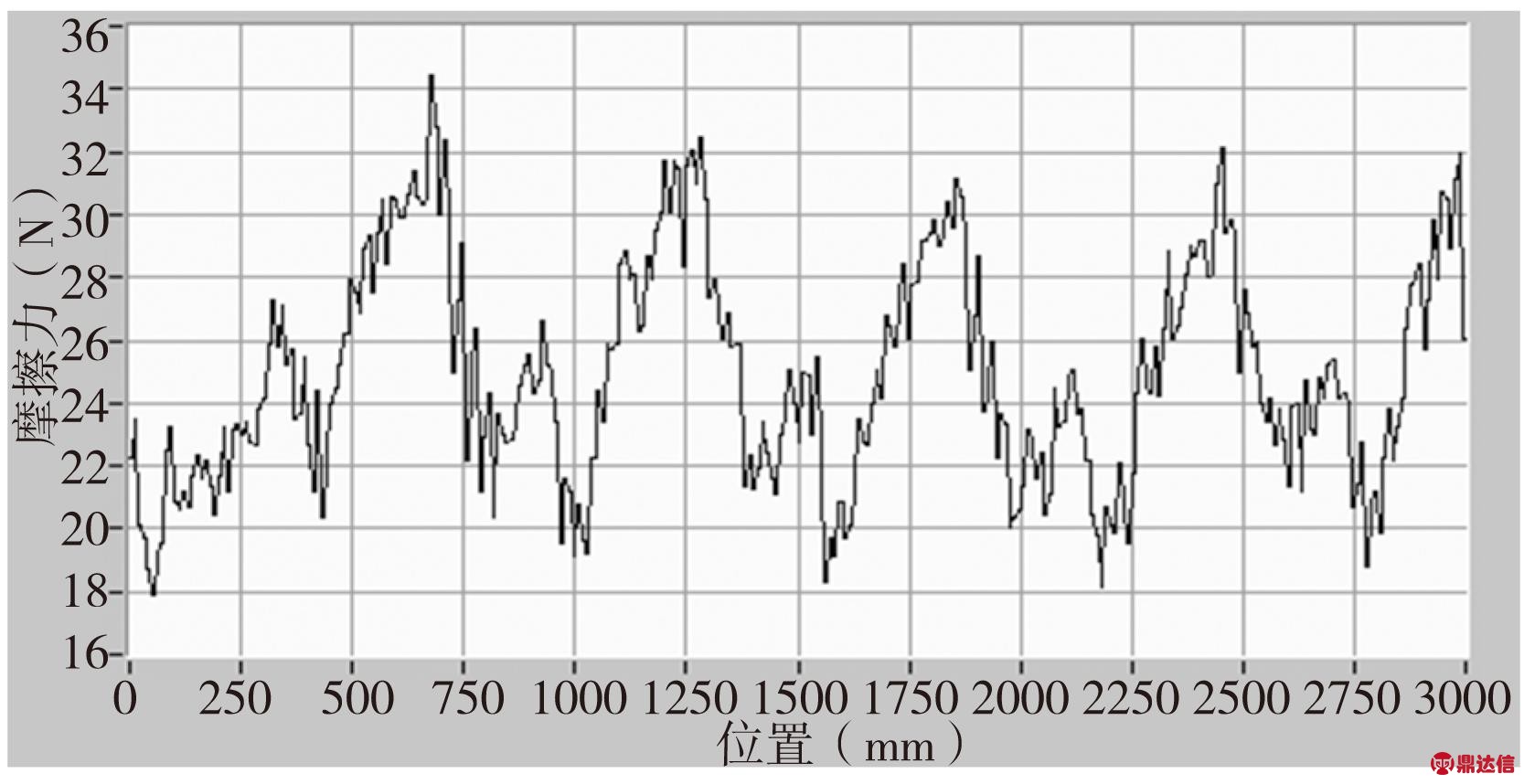
图4 6m/min运行时摩擦力测量图
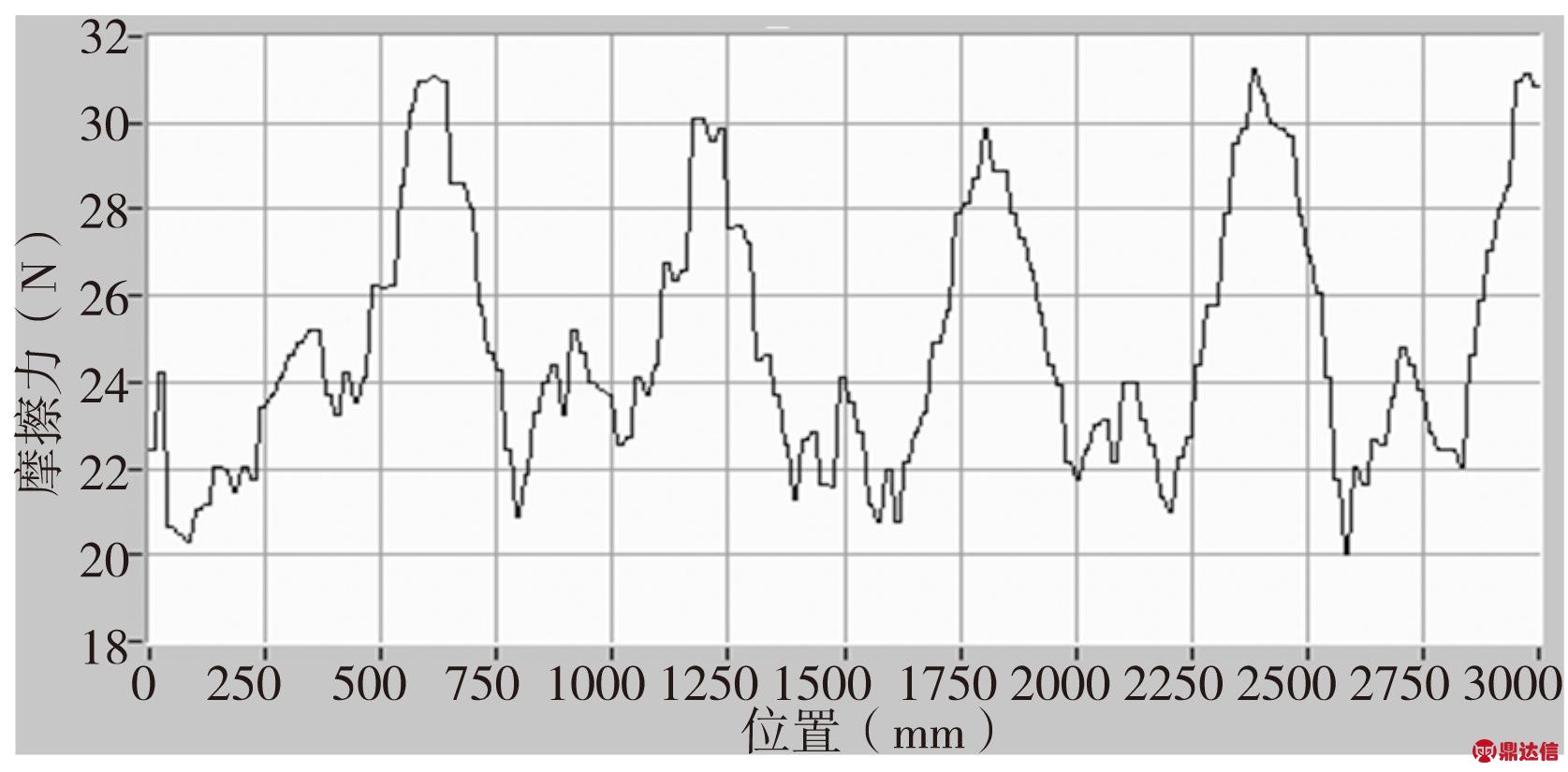
图5 12m/min运行时摩擦力测量图
由以上两图可知,在不同速度下运行时导轨副摩擦力相差不大,摩擦力变化是一个随机过程,但是存在连续的周期性波动。对该连续周期性波动进行分析可以发现该波动间隔距离基本为600mm,排除导轨制造精度问题后分析波动成因应是滑块内滚柱或保持链所造成。通过对滑块进行拆解发现,滚柱不存在问题,而保持链接头处间隙过大或是造成摩擦力波动的主要因素。
为了验证摩擦力周期波动问题成因,将保持链拆下,让滚柱在滚道内自由运动,重新测量摩擦力,结果如图6所示。由图可见,拆除保持链的滑块摩擦力波动没有明显的周期性,但因为没有保持链的约束,使滚柱之间产生直接摩擦造成摩擦力有明显的增大。针对保持链接头间隙过大造成摩擦力波动这一问题,可以考虑减小保持链接头之间距离或者在保持链接头处增加一个滚柱来加以解决。
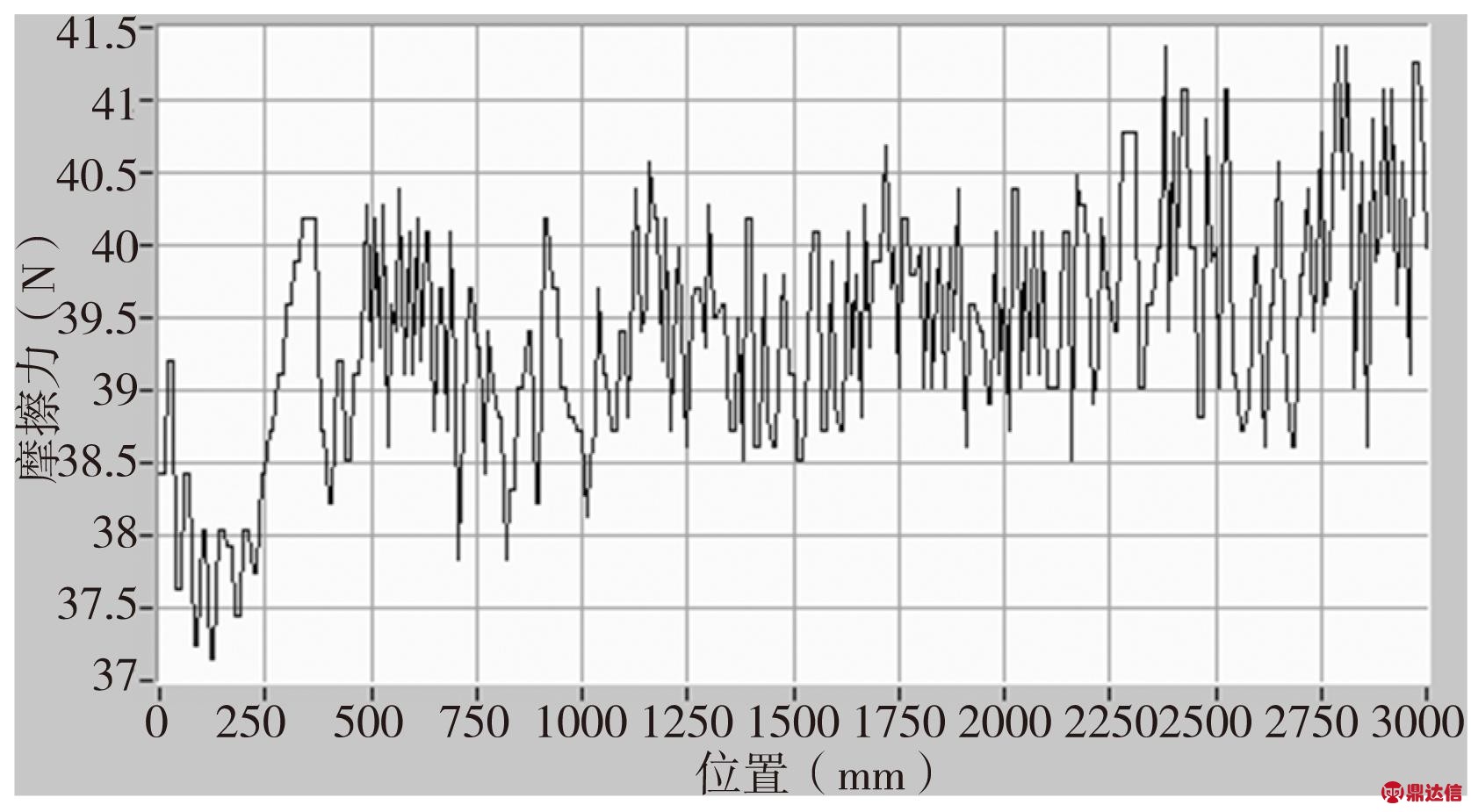
图6 去除保持链后摩擦力测量图
4 结论
本文针对滚柱直线导轨副摩擦力动态测量设计了测量系统的软硬件,该系统已在山东博特精工股份有限公司投入使用,运行可靠,性能稳定,能够满足工厂实际生产试验测量的要求。该系统为摩擦力测量过程中出现的一些问题,提供了可靠的试验验证,为提升企业生产滚柱型导轨的品质和产品的竞争力提供了有力的保证,也为滚柱直线导轨副摩擦力测量领域的相关后续研究工作提供了一个新的平台。


