
摘要:通过对滚动直线导轨副用钳制器的主要性能参数分析,确定了对滚动直线导轨副用钳制器进行可靠性试验的具体内容;针对每项试验内容,对钳制器的失效方式进行了定义,并提出了相应的试验方案;根据试验内容及相应试验方案,设计了一种滚动直线导轨副用钳制器可靠性试验装置,并详细阐述了钳制器进行可靠性试验的流程;提出了适用于滚动直线导轨副用钳制器的可靠性评估方法。
关键词:钳制器;可靠性试验;可靠性评估;试验装置
0 引言
滚动直线导轨副应用范围广泛,但其存在的问题一直没有得到很好的解决。滚动直线导轨副为点或线接触,减振性能相对较差;传统的机械加工过程中刀具的切削力、冲击载荷等主要由丝杠承担,严重影响丝杠的寿命和精度;工件在竖直方向上加工时,如遇停电等突发情况,容易发生工件坠落,造成机毁人亡的严重安全事故;直线电机与滚动直线导轨配合使用时,由于没有制动功能,直线电机带动工作台在导轨上运动时不能实现定位及刹车功能。目前,主要通过在导轨上加装钳制器部件来解决上述问题:徐增豪,胡克廷[1]等通过实验研究发现,在导轨副上加装附加减振元件是有效的减振方法;刘伟方[2]设计了一种直线导轨副用气动钳制器,该机构运行平稳,反应迅速,但其钳制力较小;李国华和张恒[3]设计了一种用于直线滚珠导轨上的液压制动器,其结构简单,夹紧力可调;宋大娇、杨晓东[4]设计了一种新型实用的导轨制动锁紧机构,该机构安装方便,补偿调整方便;刘啸龙[5]、周华标[6]申请的新型实用专利都对滚动直线导轨副用锁紧装置进行了研究。
目前,虽然一些厂家和科研院所展开了对直线导轨副制动减振装置的研究,但是针对这类装置的可靠性试验方法研究基本处于空白,本文通过对滚动直线导轨副用钳制器主要性能参数的分析,提出了相应的试验方案,设计了相应的试验装置,阐述了钳制器进行可靠性试验的流程并提出了针对钳制器的可靠性评估方法,为钳制器的优化设计及可靠性提高提供了依据。
1 主要性能参数及试验内容分析
1.1 主要性能参数分析
作为一种具有钳制和刹车功能的部件,滚动直线导轨副用钳制器的主要性能参数包括钳制力F、反应时间t以及刹车距离s。
滚动直线导轨副用钳制器的钳制力F是指滚动直线导轨副用钳制器处于钳制状态时所能承受的最大轴向力。
滚动直线导轨副用钳制器的反应时间t是指从指令信号发出到完成相关动作钳制器所需要的时间,包括伺服系统的响应时间t1和钳制器的动作时间t2。
①伺服系统响应时间t1是指从外界发出指令到钳制器活塞开始动作所需时间。
②钳制器动作时间t2是指从活塞开始动作到摩擦片与导轨接触所需时间。
由上可知,反应时间t为:
滚动直线导轨副用钳制器的刹车距离s是指从指令信号发出到钳制器完成整个刹车过程钳制器运动的总距离,包括钳制器的响应距离s1、动作距离s2以及制动距离s3。
①钳制器响应距离s1是指从外界发出指令到钳制器活塞开始动作这一过程中钳制器运动的距离,即在伺服系统响应时间内钳制器运动的距离。
②钳制器动作距离s2是指从活塞开始动作到摩擦片与导轨接触这一过程钳制器运动的距离,即在钳制器动作时间内钳制器运动的距离。
③钳制器制动距离s3是指从摩擦片开始与导轨接触到完成刹车这一过程钳制器运动的距离。
由上可知,刹车距离s为:
1.2 试验内容分析
滚动直线导轨副用钳制器试验内容主要包括以下方面:
①基本动作可靠性试验:即钳制器在无工作载荷下完成基本动作的可靠性试验,用于测试在不受外界载荷作用时钳制器完成基本的钳制、松开动作的可靠性程度,主要对钳制器的设计原理、内部结构的可靠性进行试验。
②钳制力可靠性试验:针对滚动直线导轨副用钳制器的钳制力进行的可靠性试验,用于检测一定载荷作用下钳制器能够实现钳制的能力,即钳制器提供一定钳制力的可靠性程度。
③反应时间可靠性试验:对滚动直线导轨副用钳制器反应时间进行的可靠性试验,即钳制器能够实现规定反应时间的可靠性。
④刹车距离可靠性试验:对滚动直线导轨副用钳制器的刹车距离进行的可靠性试验,即钳制器能够在规定距离内完成刹车的可靠性程度。
2 试验方法分析
2.1 失效判定
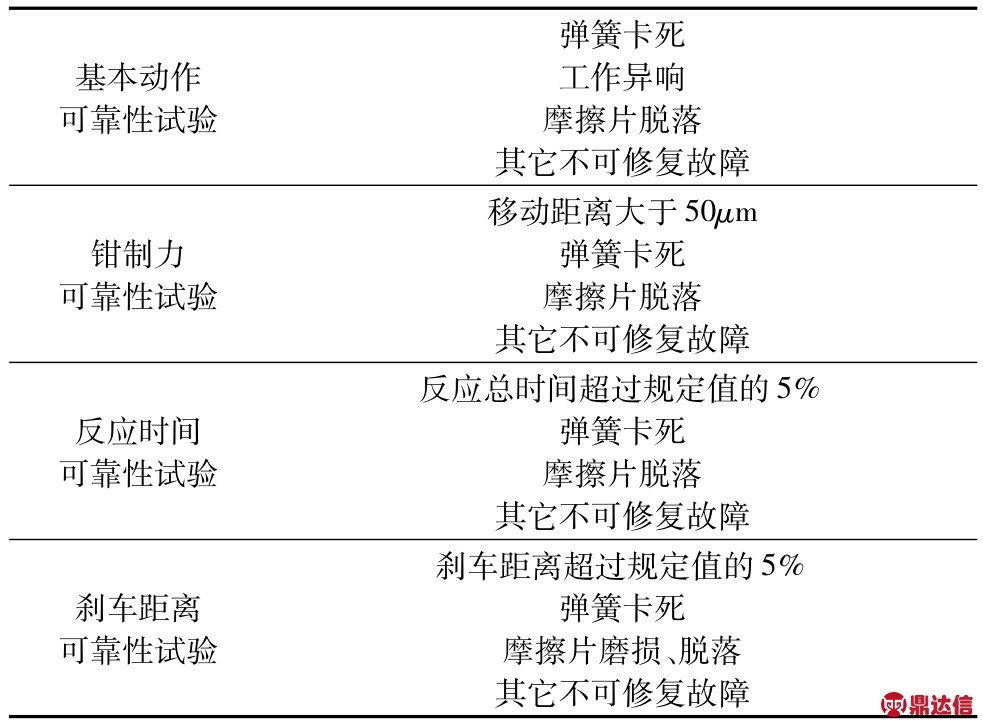
进行可靠性试验时,首先应针对各向试验内容定义相应的钳制器失效标准,从而为后续进行可靠性试验及可靠性评估提供依据。钳制器每项试验内容的失效标准如下表1所示。
表1 钳制器可靠性试验失效标准表
2.2 试验方案分析
2.2.1 基本动作可靠性试验方案
钳制器完成各项规定性能的前提是其基本动作应具备很高的可靠性,因此需对钳制器的基本动作进行可靠性试验。由于试验次数较大,试验方案中应重点解决试验效率问题,应保证在尽量短的时间内完成大量试验。通过分析,确定如下试验方案。

图1 基本动作可靠性测试方案图
在双滑块滚动直线导轨上安装两个钳制器,滑块和钳制器通过连接板连接,如图1所示,试验时两个钳制器循环进行钳制、松开动作,对其基本动作可靠性进行试验,这样保证了在大样本、高效率下的大量试验。
2.2.2 钳制力可靠性试验方案
滚动直线导轨副用钳制器的钳制力可靠性试验是指在钳制器钳制状态,通过施加一定的载荷检测其是否发生位移的试验。如图2所示,在导轨上安装滑块和钳制器,钳制器与力传感器连接,在导轨一侧平行安装长光栅,钳制器与光栅读数头通过连接板连接。试验时通过力传感器检测施加的载荷,通过长光栅检测在一定作用力下钳制器是否产生位移。
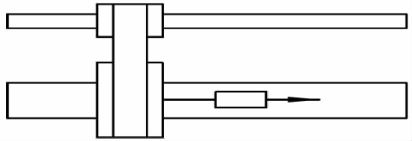
图2 钳制力可靠性试验方案图
2.2.3 反应时间可靠性试验方案
由于钳制器反应时间较短,可测试空间较小等原因,钳制器的反应时间难度较大,本文提出了电极接触式试验方案。
如图3所示,将导轨和钳制器绝缘,在钳制器摩擦块一端放置正电极,在导轨侧面放置负电极。两电极保持通电状态,当外界发处动作指令后,开始计时,当两电极导通时,计时停止,两段时间差即为钳制器的反应时间。

图3 反应时间电接触试验方案图
2.2.4 刹车距离可靠性试验方案
钳制器的刹车距离可靠性试验是指在一定的载荷下钳制器进行刹车所运动的距离。如图2所示,长光栅的光栅读数头与钳制器通过连接板连接,施加一定的载荷后,钳制器开始刹车,通过长光栅记录钳制器的刹车距离。
2.3 试验流程分析
钳制器的可靠性受多个参数的影响。本文对钳制器的可靠性试验采用定时截尾可靠性试验,即钳制器基本动作完成500万次,刹车2000次,为了能结合各项参数对钳制器的可靠性有一个科学合理整体的评估,本装置采用如图4所示的试验流程。
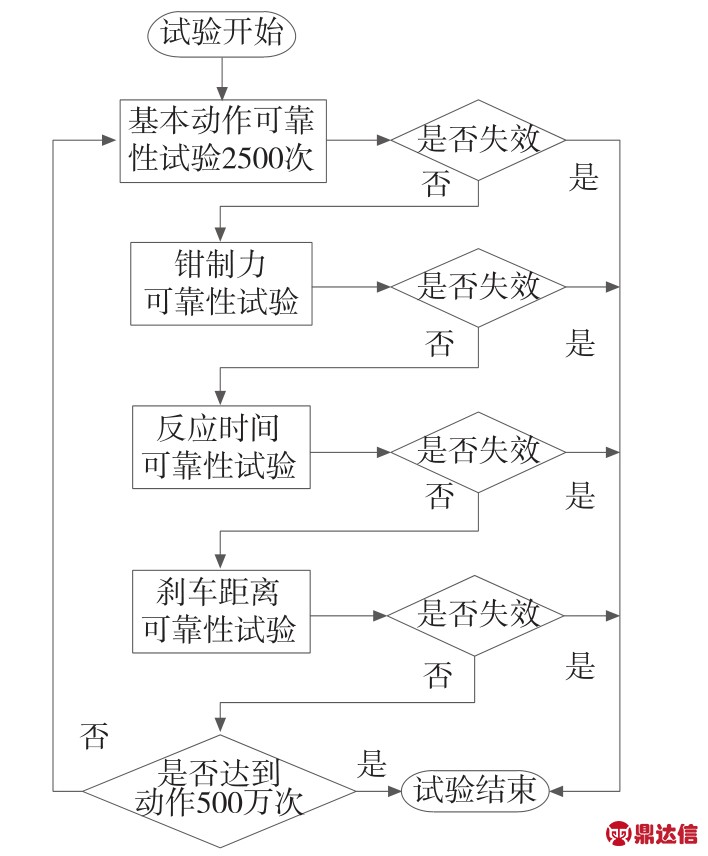
图4 试验总流程图
试验时首先进行基本动作可靠性试验,完成夹紧-松开基本动作2500次,期间钳制器基本动作功能没有失效,然后进行钳制力可靠性试验,若无失效,则继续进行反应时间可靠性试验和刹车距离可靠性试验,若无失效,则返回继续进行基本动作可靠性试验2500次,依次循环,直到完成基本动作500万次,刹车2000次。对于钳制器基本动作和钳制力可靠性试验,试验时记录出现的可修复性故障次数n以及试验总次数N;对于反应时间和刹车距离可靠性试验,除记录n、N外,还应分别记录反应时间t和刹车距离s。若试验过程中任何一项出现钳制器失效,则终止试验。
对于每项试验的具体流程,如图5~图8所示。
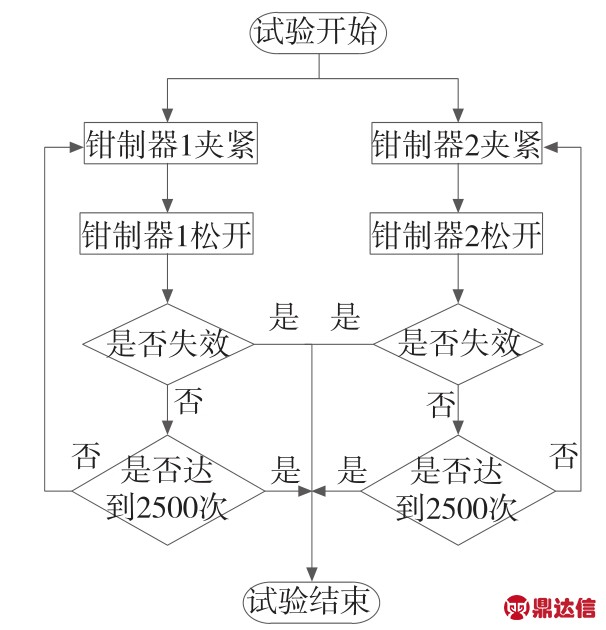
图5 基本动作可靠性试验流程图
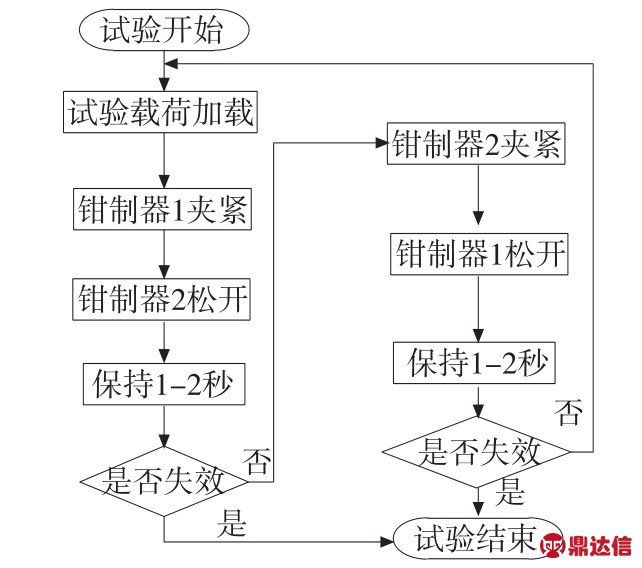
图6 钳制力可靠性试验流程图
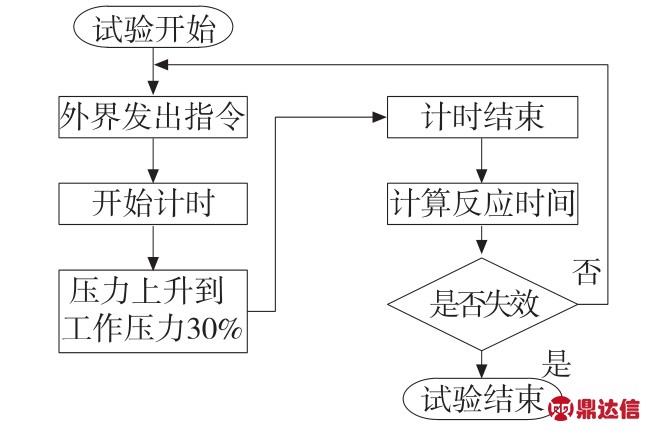
图7 反应时间可靠性试验流程图

图8 刹车距离可靠性试验流程图
进行试验时,整个过程按照试验总流程图的步骤进行,当进行单项试验内容时,按照每一项试验的具体流程图进行试验。当做完整个试验时,即可获得关于钳制器可靠性方面较为全面的数据,为钳制器可靠性评估提供依据。
3 试验装置设计
为了满足前文试验要求,本文设计了如图9所示的钳制器可靠性试验装置。本试验装置包括床身主体、起重系统、测试系统、收紧系统、加载系统以及缓冲系统6部分组成。
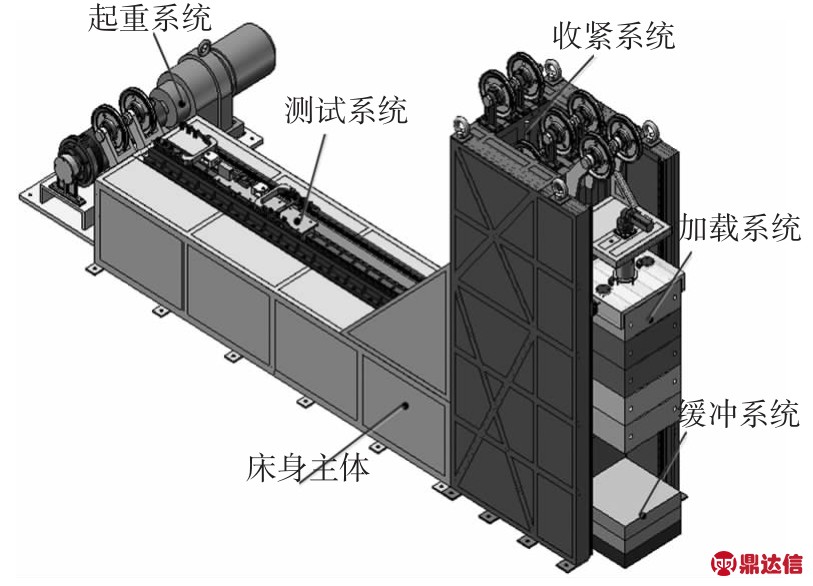
图9 滚动直线导轨副用钳制器可靠性试验装置图
床身主体由水平床身和竖直床身组成,起重系统包括变频电机、减速器和钢丝绳卷筒等,测试组件如图10所示,主要包括滚动直线导轨副、钳制器、力传感器以及长光栅等,收紧装置包括直线轴承和收紧滑轮等,加载系统包括电机-丝杠加载组件及质量块组件,缓冲系统主要由缓冲橡胶组成。

图10 试验装置测试组件图
本装置采用了电动加载和质量块加载的复合加载方式,如图11所示。电动加载组件主要包括伺服电机、减速器和丝杠,质量块加载组件主要包括导向导轨和质量块。
加载时首先由伺服电机带动丝杠开始加载,当加载力达到一定值时,用等质量的质量块代替此时的加载力,伺服电机卸载;然后伺服电机作用在质量块上重新开始加载,当伺服电机的加载力达到一定值时,再用等质量的质量块代替此时的加载力。重复上述此过程,直到完成试验所要求的最大加载力。本加载方式既能实现较大的加载力范围,同时加载力连续可调,力分辨率较高,又不需要电机具有很大的输出功率,且成本较低。
钳制器在一定的载荷及初速度下进行刹车时,水平和竖直两种工况下的受力方式是不同的。为了保证在两种工况下刹车时钢丝绳不会松开脱落,本试验台设计了如图12所示的收紧装置。该装置利用直线轴承进行导向,利用拉伸弹簧使钢丝绳在滑轮中始终保持收紧状态。
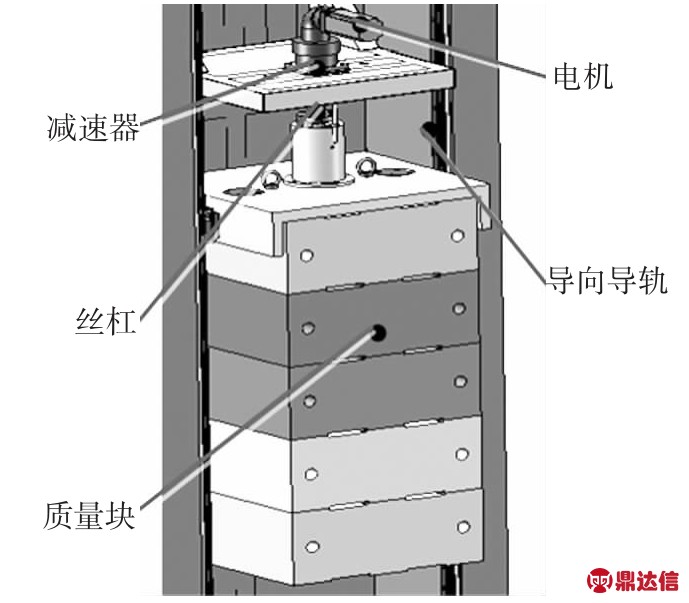
图11 试验装置加载系统图

图12 试验装置收紧系统图
对于滚动直线导轨副用钳制器的反应时间可靠性试验,本装置采用上述电极接触式试验方案。试验时,在导轨和钳制器摩擦片上设置两个电极,做好绝缘隔离工作,当动作信号发出时,开始计时,当两电极导通时,计时停止,两段时间差即为钳制器的反应时间。
如图13所示,试验装置已经完成加工,目前正处于编程调试阶段。

图13 滚动直线导轨副用钳制器可靠性试验装置实物图
4 可靠性评估方法分析
钳制器通过可靠性试验得到试验数据后,采用统计学的方法进行评估分析可以对产品的可靠性有一个科学合理的认识。现有的电子产品的可靠性试验和评估分析方法并不适用于机械产业[7-8]。本文中采用平均故障间隔时间(MTBF)以及威布尔模型两种方法对滚动直线导轨副用钳制器的可靠性进行评估。平均故障间隔时间(MTBF)主要用于评估钳制器的基本动作可靠性和钳制力可靠性;威布尔模型主要用于评估钳制器的反应时间可靠性和刹车距离可靠性。
4.1 采用平均故障间隔时间(MTBF)进行可靠性评估分析
平均故障间隔时间(MTBF)是指产品在操作使用或测试期间的平均连续无故障时间。本文可靠性试验中所记录的试验及故障次数可理解为广义的时间。通过钳制器可靠性试验得到试验次数、故障次数和形式以及失效形式等数据,采用平均故障间隔时间(MTBF)对钳制器基本动作可靠性和钳制力可靠性进行评估。首先应对故障进行分类,根据每种故障对钳制器产品的影响程度分配权系数,将试验过程中记录的故障次数乘以每种故障对应的权系数,用计算所得值除试验总次数,即可计算出钳制器在某一性能指标下的平均故障间隔时间,如式(1)所示:
式中,α为故障影响权系数,n为可修复性故障次数,N为每项试验的试验总次数。
4.2 采用威布尔模型以及威布尔概率纸图进行可
靠性评估分析
滚动直线导轨副用钳制器本质上是一套机械传动装置,其失效模式以传动件的疲劳、摩擦片的磨损为主。机械产品的可靠性模型服从威布尔分布或者对数正态分布[9-11]。
威布尔分布模型具有三个参数,包括形状参数β、尺度参数η和位置参数γ,分别描述其分布函数的形状、坐标尺度和开始发生故障的时间。本文将采用这种三参数威布尔分布模型对钳制器反应时间及刹车距离可靠性进行评估。
对于三参数威布尔分布,其可靠性函数如式(2)所示:
这里β称为形状参数,η称为尺度参数,γ称为位置参数,对两边求一次对数得:
或
对式(4)再求一次对数得:
令
则式(5)成为x-y坐标系下的一条直线:
式(7)称为威布尔变换,它实质上是威布尔模型的线性化过程。经过威布尔变换以后,在x-y坐标系下的图形就是威布尔概率纸图,简称WPP图。
设有一组失效数据:t1,t2,…,tn(在本文中为通过试验测得的与反应时间和刹车距离有关的试验数据),使用可靠性无参数估计的方法(例如中位秩估计R(ti)=1-(i-0.3)/(n+0.4)),可以估算出对应于ti的可靠性Ri,从而得到一个数组列:
在威布尔三参数中,其位置参数只改变图形的位置,而不改变图形的形状和尺寸,即位置参数的改变对图形的分布规律没有影响。因此,无论令位置参数为何值,并不影响数据在威布尔概率纸图上的分布规律。为了方便处理,可以令γ=0,然后使用变换式(6)于上面的数组列可得:
x-y坐标系下的图形。如果它们大体上沿一条直线分布,则认为威布尔分布能用于建模这列失效数据。也即,如果认为钳制器的可靠性模型服从威布尔分布,则它的可靠性数值在威布尔概率纸图上应该大体沿一条直线分布。
5 结束语
本文通过对滚动直线导轨副用钳制器主要性能参数的分析,确定了对钳制器可靠性进行评估应进行的试验内容,包括基本动作可靠性试验、钳制力可靠性试验、反应时间可靠性试验及刹车距离可靠性试验,对于每项试验内容,对钳制器的失效方式进行了定义,提出了相应的试验方案,设计了一种滚动直线导轨副用钳制器可靠性试验装置,详细阐述了基于本试验装置的钳制器可靠性试验流程,提出了适用于滚动直线导轨副用钳制器的可靠性试验评估方法,即采用平均故障间隔时间(MTBF)以及威布尔模型进行数据处理,从而对钳制器的可靠性进行科学合理的评估。


