
摘 要:针对建筑物表面清洁机器人(BFMR)容易受环境和振动影响、运行稳定性差等问题, 设计了安全稳定的控制系统. 在垂直和水平机器人的对接过程中, 利用导轨制动系统抑制冲击, 并利用再平层过程补偿机器人内置导轨与建筑物表面导轨之间的定位误差. 此外, 利用提出的振动抑制系统, 根据钢丝绳动态属性的状态估计值, 控制钢丝绳的加速度, 对环境噪声产生的振动进行抑制, 提高垂直机器人垂直运动的稳定性和可靠性. 实验结果表明, 本文设计的控制系统能够有效降低振动影响, 具有可行性.
关键词:清洁机器人; 垂直运动控制; 振动抑制; 再平层; 内置导轨
许多建筑物表面机清洁器人(building façade maintenance robot, BFMR)系统[1]采用安装在建筑物屋顶的卷车控制机器人运动[2]. 这种系统与电梯系统类似, 能够保证安全但会受到很多环境因素干扰, 例如风力和振动[3]. 文献[3]使用H-infinity控制方法降低由驱动电机和滑轮离心率旋转振动的转矩波动引起的钢丝绳振动. 根据文献[4]研究结果, 当电梯运动时, 钢丝绳长度的变化会导致振动发生, 从而改变了动态属性. 为了解决这个问题, 基于振动抑制的研究已经展开, 学者根据钢丝绳的力度在每层安装一个线性控制器. 文献[5]矫正由钢丝绳力度产生的每层楼之间的运动误差, 在定位过程中使用再平层过程.
然而, 现有清洁机器人类型中, 缆绳类型机器人通过钢丝绳沿着轨道运动, 完成对建筑物的表面清洁. 钢丝绳长度的变化会导致振动发生, 改变了动态属性, 导致运行稳定性较差的问题.
为了解决上述问题, 本文利用内置导轨设计了BFMR的垂直运动控制控制系统, 垂直运动和水平运动机器人在对接和层间交换过程中的垂直运动稳定性问题. 在对接过程中, 使用轨道制动机制作为冲击抑制方法, 使用再平层技术补偿偏差影响.
1 BFMR系统结构
图1和图2所示分别为清洁机器人的运动方式和机械结构, 可以看出, BFMR系统由垂直机器人和水平机器人系统组成, 在建筑物表面安装内置导轨[4]. 水平机器人沿着横向导轨移动, 无需绞车钢丝绳.
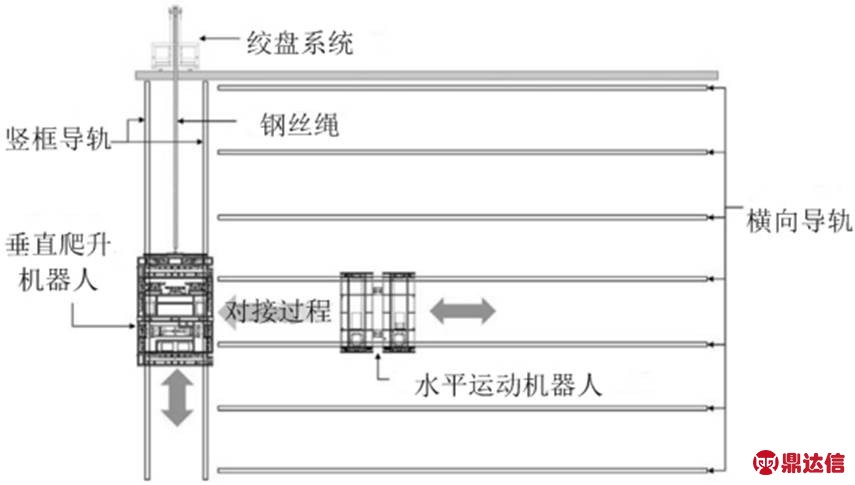
图1 建筑物表面清洁机器人运动方式

图2 建筑物表面清洁机器人机械结构图
运动过程中, 导轨会产生振动, 需要通过降低振动来保证水平机器人运行的稳定性[5]. 因此, 本文主要研究机器人工作的安全性和稳定性. 考虑两个问题: 1)对接过程的安全问题; 2)当两个机器人进行对接时, 负载运动会产生冲击和振动.
2 安全对接
为了实现层间交换, 水平机器人必须与垂直机器人完成对接过程, 使用导轨制动系统固定机器人, 执行导轨对齐过程.
2.1 对接设备
图3显示了垂直机器人和水平机器人对接过程. 在对齐过程中, 当误差低于正负2mm时, 导轨制动系统将固定机器人于建筑物竖框导轨上. 然后, 垂直机器人的导轨扩展系统构建一个临时桥, 缩短两个导轨之间距离.
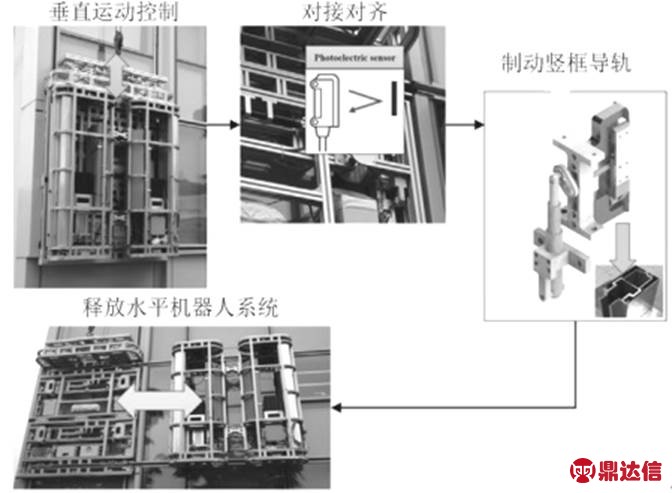
图3 层间交换对接过程
2.2 导轨制动
从图2可以看出, 垂直机器人安装有4个导轨制动系统[6]. 通过电机驱动每个导轨制动系统, 系统凸轮推着两个橡胶摩擦片卡到竖框导轨上, 产生很大压缩力, 从而固定机器人. 导轨制动系统的制动力正比于压缩力, 系统制动力计算如下:
 (1)
(1)上式中, 人造橡胶压缩长度 为0.25mm; 静态摩擦系数
为0.25mm; 静态摩擦系数 为1.5; 弹性系数
为1.5; 弹性系数 为8000N/mm.
为8000N/mm.
根据等式(1), 一个导轨制动系统的制动力为300 kgf, 垂直机器人有4个制动系统, 因此总制动力为1200 kgf. 水平机器人的重量接近于300 kgf, 满足制动系统的容许负载[7].
图4显示对接过程中振动情况. 在对接过程中, 当水平机器人进入垂直机器人的内置导轨时, 水平机器人滚轮的振动对垂直机器人会产生消极影响.
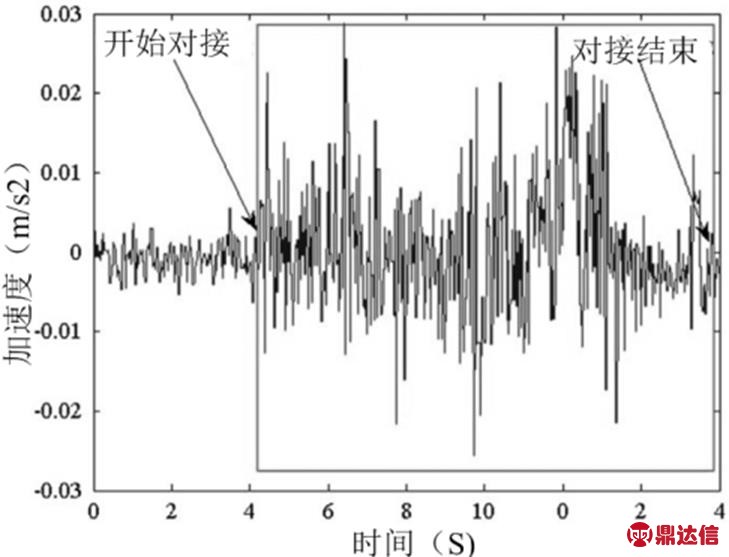
图4 对接过程的振动
2.3 释放导轨制动后执行再平层操作
通过控制绞盘来矫正两个导轨之间的误差从而实现再平层过程, 再平层过程如图5所示.
再平层的控制算法根据钢丝锁的扭曲计算移动距离, 根据机器人系统的位置和重量确定钢丝绳的扭曲. 根据计算的钢丝锁扭曲, 通过绞盘电机的反馈控制逐渐调节两条导轨之间的垂直误差, 直到机器人的光电传感器检测导轨已对齐.
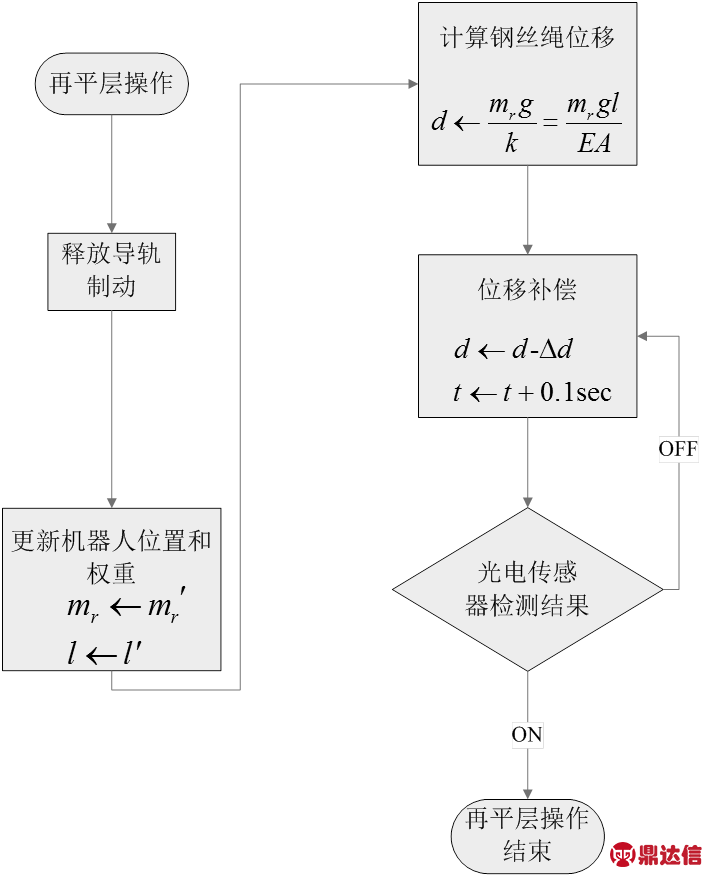
图5 再平层操作过程控制算法
3 垂直运动控制
利用振动抑制控制系统[8]控制绞盘机的加速度来提高垂直运动的稳定性.
3.1 钢丝锁参数
与垂直运动稳定性相关的钢丝锁参数包括弹性常数 和阻尼常数
和阻尼常数 , 这些参数由钢丝锁长度变化确定, 如式(2)所示.
, 这些参数由钢丝锁长度变化确定, 如式(2)所示.
 (2)
(2) (3)
式中, 钢丝锁横截面积 为4.7*10-5 m2; 钢丝锁弹性系数
为4.7*10-5 m2; 钢丝锁弹性系数 为193*109 Pa; 钢丝锁阻尼系数
为193*109 Pa; 钢丝锁阻尼系数 为5.2*109 Pa; 为钢丝锁长度, 即屋顶与垂直机器人之间的距离.
为5.2*109 Pa; 为钢丝锁长度, 即屋顶与垂直机器人之间的距离.
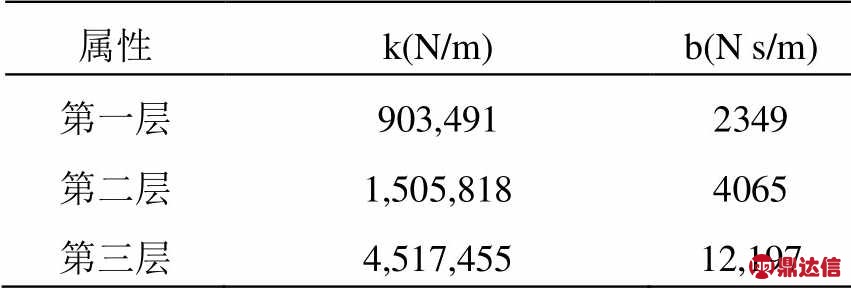
当垂直机器人沿着横向导轨运动时, 钢丝锁长度实时发生变化, 这也就导致钢丝锁的弹性常数和阻尼常数也发生变化. 然而, 在实际情况中, 这些变化是非线性的, 且文献[9]表明这些参数的变化速度比垂直机器人运动慢, 即当钢丝锁长度突然增加时, 这些参数并不是随之突然变化, 而是缓慢变化, 具有滞后性. 因此, 为了方便计算, 本文在特定部分(每一层楼为一个部分)考虑它们为常数, 即为在该层楼之间的平均值. 从表1可以看出, 每层存在特定的钢丝锁参数和, 当机器人运动到其它楼层时, 垂直机器人的运动控制器会更新参数值.
表1 钢丝锁参数
3.2 系统模型
根据钢丝锁参数和各个部分的动力学系统来构建垂直系统模型, 如图6所示. 机器人的垂直运动由两个主要的动力学方程组成: (1)应用于垂直机器人的总额外力之和; (2)绞车滚筒中心力矩之和.
 (4)
(4)式(4)的 表示从钢丝锁一半的速度值
表示从钢丝锁一半的速度值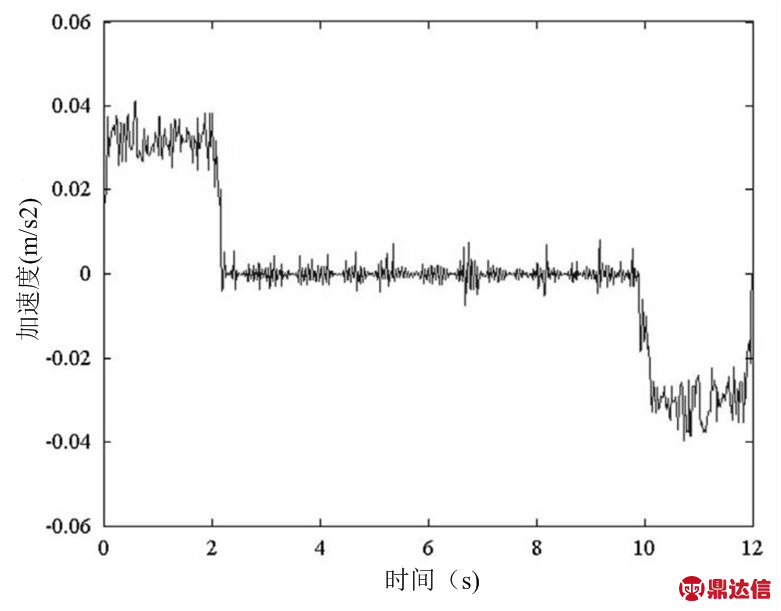 减去垂直机器人的速度
减去垂直机器人的速度 , 可表示由于钢丝绳振动引起的位移时间变化率. 该方程对描述两个主要动力学方程很重要, 第一个动力学方程与钢丝绳的振动有关, 如下所示.
, 可表示由于钢丝绳振动引起的位移时间变化率. 该方程对描述两个主要动力学方程很重要, 第一个动力学方程与钢丝绳的振动有关, 如下所示.
 (5)
(5)
(6)从式(5)和(6)可以看出, 垂直机器人额外力 总和包括钢丝锁长度变化
总和包括钢丝锁长度变化 产生的弹力和阻尼力. 当这些力的和除以机器人的质量
产生的弹力和阻尼力. 当这些力的和除以机器人的质量 , 其结果与垂直机器人垂直速度
, 其结果与垂直机器人垂直速度 相同.
相同.
 (7)
(7)
 (8)
(8) (9)
(9)
 (10)
(10)
第二个方程: 楼顶绞盘中心力矩 之和, 是用来计算钢丝锁加速度
之和, 是用来计算钢丝锁加速度 . 式(7)根据式(8)钢丝锁张力T来计算力矩和, 通过钢丝锁振动和绞盘输入转矩
. 式(7)根据式(8)钢丝锁张力T来计算力矩和, 通过钢丝锁振动和绞盘输入转矩 计算张力T. 根据角加速度和线加速度之间的关系, 式(7)可以变形为式(9), 式(9)可推导出式(10).
计算张力T. 根据角加速度和线加速度之间的关系, 式(7)可以变形为式(9), 式(9)可推导出式(10).
基于式(4)、(6)和(10), 可以推导垂直机器人运动的状态方程. 创建状态方程之前, 需要定义垂直机器人运动状态.
 (11)
(11) (12)
 (13)
(13)
式(11)中,  为垂直机器人运动状态.
为垂直机器人运动状态.  为钢丝锁位移, 与相等;
为钢丝锁位移, 与相等;  为机器人垂直运动速度, 等于;
为机器人垂直运动速度, 等于;  为通过绞盘电机钢丝锁移动速度, 等于. 钢丝锁速度作为反馈控制值和振动抑制的输入状态估计. 系统模型的输入为绞盘的转矩函数.
为通过绞盘电机钢丝锁移动速度, 等于. 钢丝锁速度作为反馈控制值和振动抑制的输入状态估计. 系统模型的输入为绞盘的转矩函数.
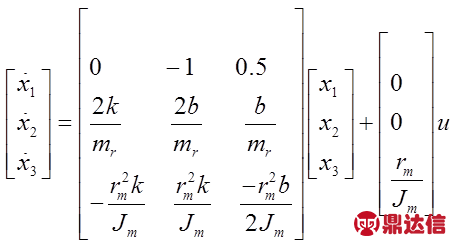 (14)
(14) (15)
将式(14)和(15)状态方程与运动方程(11)-(13)一起考虑. 机器人重量、钢丝锁阻尼常量b和钢丝锁弹性常量k会随着垂直机器人的位置变化而发生变化. 实际应用中, 可按照表1更新钢丝锁参数k和b.
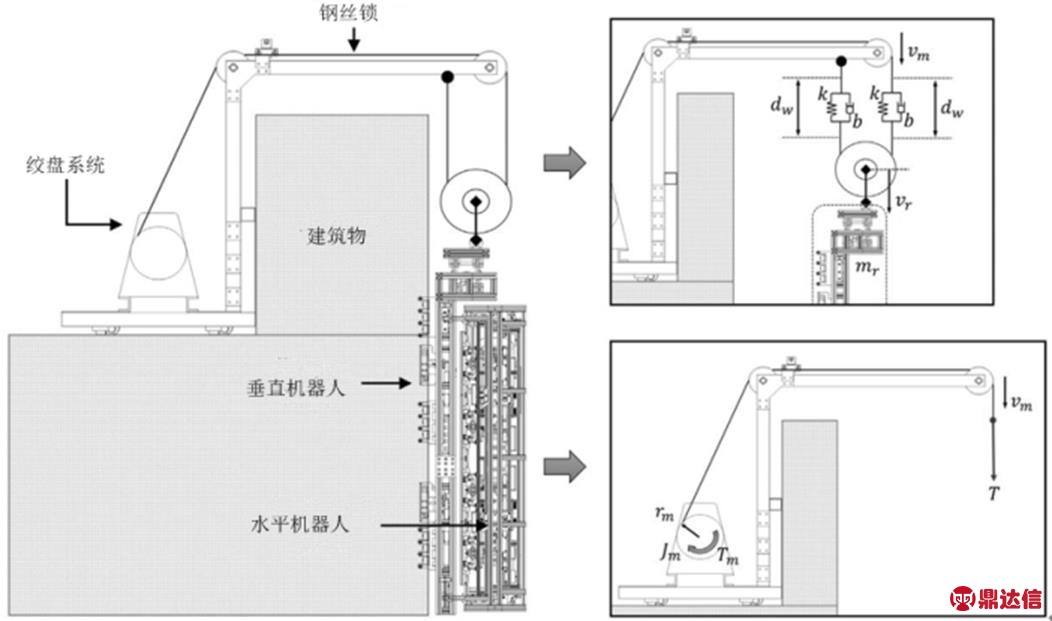
图6 建筑物表面机器人垂直运动控制模型
3.3 根据状态估计量抑制振动
利用状态估计抑制振动, 进一步提高BFMR系统垂直运动的稳定性. 基于先前介绍的BFMR系统数学模型, 估计运动状态, 估计值用于提供反馈抑制控制, 如图7所示.
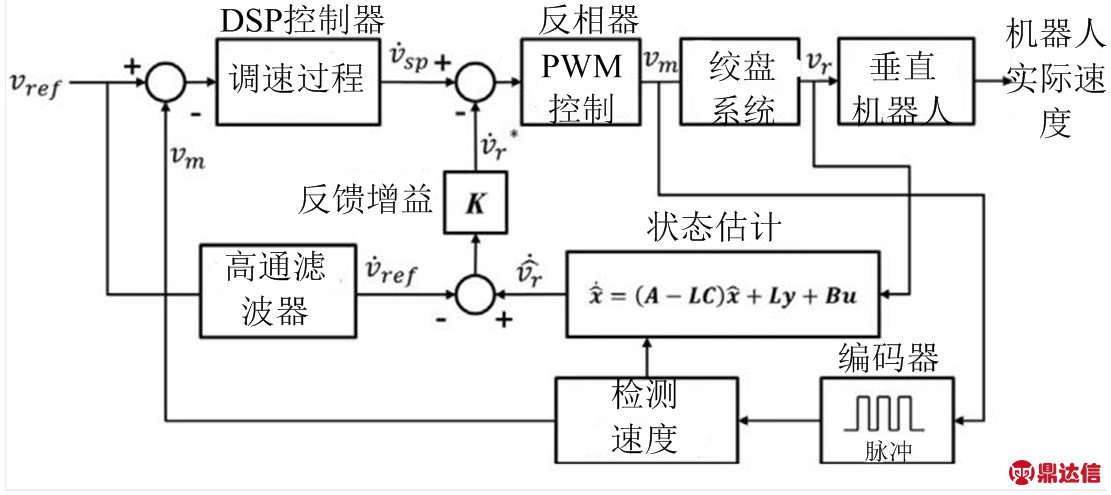
图7 反馈振动抑制算法框图
根据编码器测量的钢丝锁速度和输入扭矩来进行状态估计, 该估计值用于调整系统输入扭矩, 减少钢丝锁振动.
 (16)
(16) (17)
 (18)
(18)
(19)通过式(16)和(17)描述的系统模型确定式(18)的状态估计值. 在式(18)中, 估计增益矩阵L用于确定状态估计值, 也用于调节式(19)的状态估计值. 通过确定L的适当值, 使状态估计值接近于输出值, 通过反馈值K抑制振动.
 (20)
(20)
 (21)
(21)使用极点配置法确定式(20)和式(21)中的估计增益矩阵L和反馈控制增益矩阵K. 极点配置法是一种用于将闭环极点放置在S平面任何位置的方法.
(22)
 (23)
(23)若使用极点配置法, 则必须定义垂直机器人的运动估计具有可控性和可观察性, 即系统动力学矩阵A的秩等于可控性矩阵 的秩, 对可观察性矩阵也一样. 本文中这两个矩阵通过式(22)和(23)确定, 且它们的秩都为3, 为矩阵A的秩.
的秩, 对可观察性矩阵也一样. 本文中这两个矩阵通过式(22)和(23)确定, 且它们的秩都为3, 为矩阵A的秩.
(24)
确认工作完成后, 就确定了垂直机器人的极点. 对于极点配置法, 这些极点构成闭环特征方程, 该方程存在3个根. 根据, 通过观察矩阵计算估计增益矩阵L和通过控制矩阵获取反馈控制增益矩阵K.
总之, 基于状态估计的振动抑制算法用于估计垂直机器人运动的不确定性, 使得机器人在受到外界干扰时也能稳定运行.
4 实验及分析
进行实验验证振幅抑制算法的有效性, 相关参数设置如表2所示, 实际环境如图8所示.
表2 机械配置
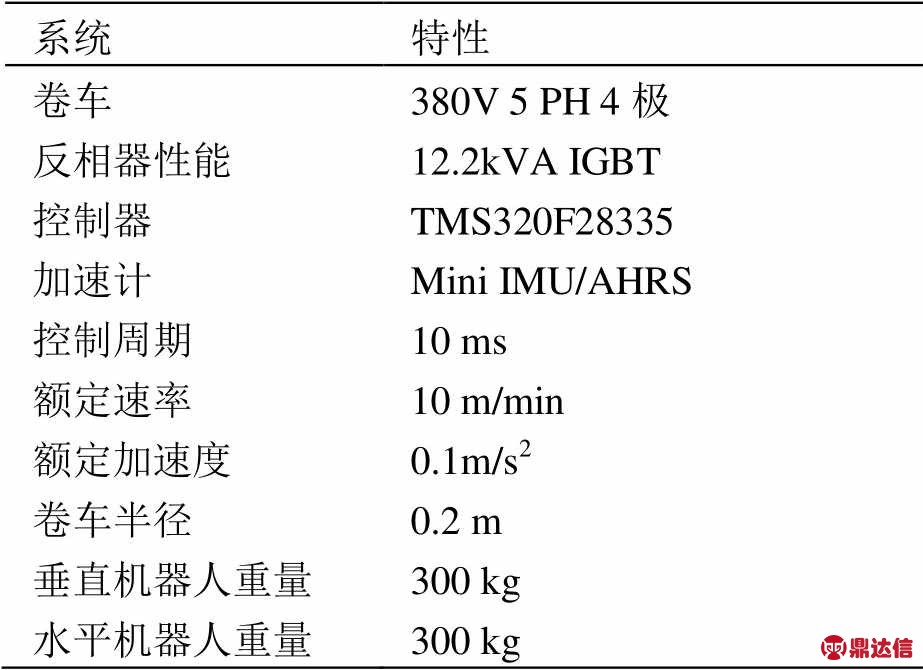
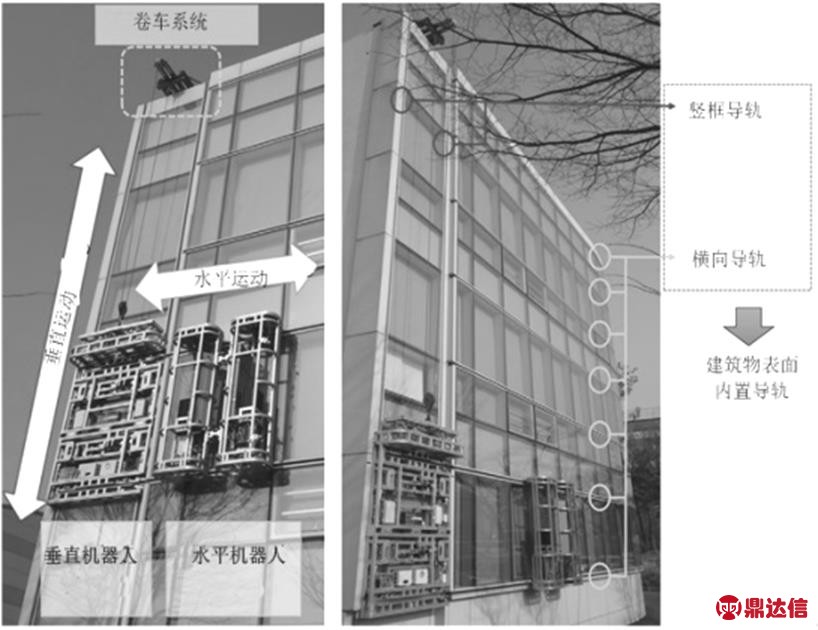
图8 BFMR系统实验环境
卷车系统由12.2kVA的IGBT反相器和380V-5HP的绞盘组成, 控制器‘TMS320F28335’用于导轨制动系统和垂直运动控制, 微型IMU/AHRS装备有32位CPU, 用于测量垂直机器人的加速度. 此外, BFMR系统的重量为600 kg.
首先, 在没有使用振幅抑制控制算法的BFMR系统上进行测试, 图9(60mm/s)和图10(120mm/s)分别显示了实验结果. 测量值因为绞车电机扭矩、滑轮离心率和其它外界环境干扰的存在变得不可信. 图11(60mm/s)和图12(120mm/s)为使用振动抑制控制算法的实验结果图. 从图中可以看出, 加速部分的振动与其它部分相比明显降低. 比较使用和未使用振动抑制控制算法在加速部分产生的振幅, 发现前者比后者降低了0.03m/s2. 从实验结果可以看出, 本文系统可以抑制大约30%的振幅(峰峰值), 能够使垂直机器人运行过程更加稳定.
另外, 通过大量实验, 结果表明, 在满足稳定性要求下, 本文具有振动抑制算法的BFMR系统的最大运动速度约为195mm/s. 而目前市面上现有的BFMR系统的最大移动速度约为150mm/s, 说明本文系统能够大大提高工作效率.
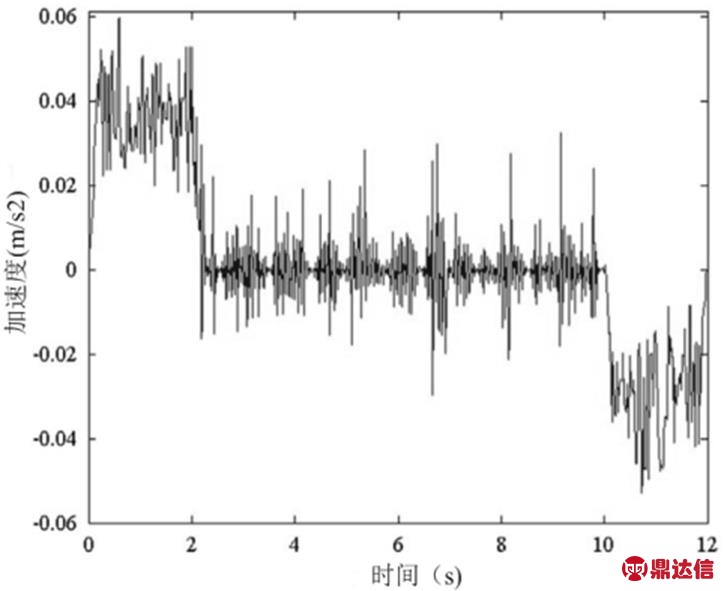
图9 没有使用振动抑制算法的实验结果(60mm/s)
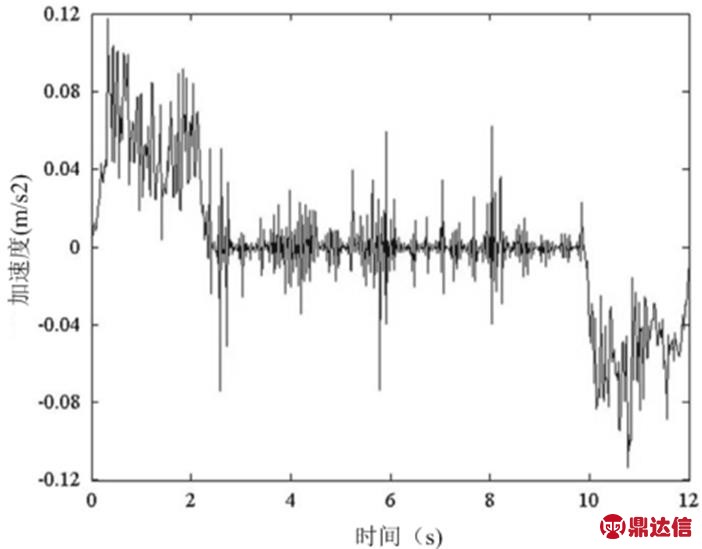
图10 没有使用振动抑制算法的实验结果(120mm/s)
图11 使用振动抑制算法的实验结果(60mm/s)
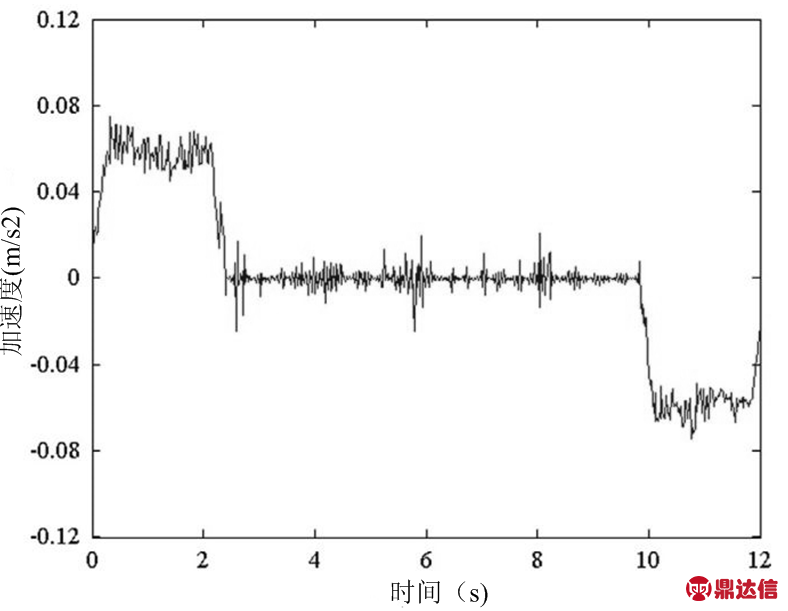
图12 使用振动抑制算法的实验结果(120mm/s)
5 结语
针对机器人对接过程的安全性和垂直运动的稳定性, 本文设计了一种BFMR垂直控制系统. 利用导轨制动系统降低机器人对接时产生的冲击和振动; 利用再平层技术使垂直机器人和建筑物横向导轨对齐; 利用振动控制系统用于降低悬挂系统固有的振动. 实验结果表明, 本文设计的运动控制系统提高了机器人运动的准确率和稳定性.
未来将对垂直运动系统进一步研究, 特别是钢丝绳悬挂重物时的运行稳定, 使其能够应用于高速上升和下降运动的清洁机器人.


