
提要:为直线滚动导轨用于垂直导向运动设计一种锁紧装置,该装置避免了因锁紧状态而对导轨本体的损伤和运动精度的影响,对数控机床的定位精度起到了很好的保证作用。
在机床的运动系统中,垂直运动坐标的定位由于受到部件自身重力的影响而产生不可靠因素,故辅助的定位锁紧装置是保证坐标定位精度不可忽视的重要手段。细数一下通常的导轨锁紧机构,无论是利用凸轮、楔块、摩擦片等制动元件,还是选用手动或液压等不同方式来实现,对于传统的滑动导轨来说,可以将锁紧制动力直接作用于导轨之上实现稳定可靠的锁紧而又不会对导轨产生不利的影响,故锁紧机构的设计和配置相对容易一些。而对于现在更有利于运动系统精度实现的滚珠丝杠加直线滚动导轨配置的结构,锁紧机构不仅因滚动导轨的特殊性难于布置和设计,而且对实现锁紧的功能和可靠性提出了更高的要求。
本文就是针对这一难点,给出了一个解决大型机床在垂直运动方向使用直线滚动导轨时随机定位锁紧的设计应用方案。
1. 问题的提出
作为起承载和导向作用的导轨,在机床领域的使用过程中,其运动精度是最关键的指标。这就要求导轨不但具备运动的平稳性,而且要满足精确的导向和定位,不合理的导轨定位锁紧往往会对它的运动精度产生不利影响。
传统的滑动导轨副垂直坐标锁紧是将夹紧力直接作用在导轨上,依靠静摩擦力使升降部件与固定部件相对静止。这种锁紧方式的前提是导轨不但能够承受足够的运动载荷,还要在外加锁紧力的状态下保持自身良好的几何精度不变。这两个基本要求对于直线滚动导轨副来说,由于其导轨截型面积相对于普通滑动导轨较小,而且截型复杂、几何精度很高,如果将锁紧力直接施加在导轨体上,将会产生既不能保证可靠的锁紧状态又会损伤导轨机体,造成几何精度和运动精度两败俱伤的严重后果。这是我们在应用直线滚动导轨中必须加以注意和避免的,也是在垂直安装方向更好地使用直线滚动导轨需要亟待解决的问题。
2 .锁紧机构的设计思路与结构
笔者所在的公司是专业从事研发生产大型龙门式加工中心的企业,为解决其中一款横梁升降式龙门机床的横梁部件在使用直线滚动导轨承载导向的锁紧问题时,我们重点关注了直线滚动导轨锁紧机构设计中应该避免的核心要点,分析了直线滚动导轨安装使用时空间结构紧凑的特点,为其设计出相适应的锁紧机构。
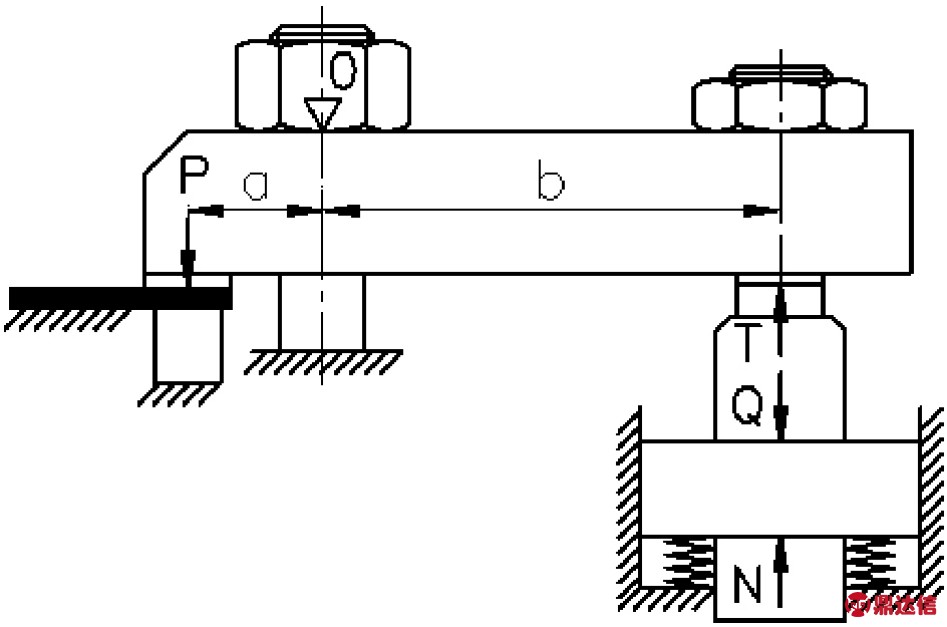
图1 锁紧机构结构图
1. 固定部件 2. 直线导轨 3. 运动部件 4. 锁紧板 5. 调整支块 6. 支点螺杆 7. 液压缸体 8. 组合碟簧9. 活塞杆 10. 液压油口 11. 杠杆臂 12. 球面垫圈 13. 摆动压块
这种用于直线滚动导轨的锁紧机构在方案确定和设计过程中,我们重点考虑了以下几个方面:
(1)基于直线滚动导轨体不能直接受到夹紧外力的作用,把外加锁紧载荷进行了转移。
(2)由于直线滚动导轨使用的空间所限,要满足结构紧凑且夹紧力足够,取得“以小博大”的使用效果。
(3)用于锁紧的输出力持续恒定,不会因外部的突变因素而出现大的波动或泄力。
(4)易于数控设备的实时控制,以占用最少的系统资源达到控制准确可靠。
(5)便于装配制造和批量化生产,达到独立成为部件,满足通用化、系列化的要求。
完成设计的锁紧机构如图1所示。整个机构主体是建立在杠杆机构的原理上,利用刚性极好的组合碟簧来提供锁紧力来源,由自适应的终端锁紧块完成锁紧动作。锁紧原理和过程如下:
当运动部件3需要与固定部件1相对静止处于定位状态时,控制系统发出指令,液压系统电磁阀执行动作使液压缸体7上部的油液通过液压油口10排出,此时组合碟簧8施加弹力推动活塞杆9向上移动,该力通过杠杆臂11和支点螺杆6所组成的杠杆机构按比例放大后形成夹紧力,借助摆动压块13和调整支块5作用于锁紧板4上,在这三者之间产生的静摩擦力来保持它们之间的相对静止,即保证了运动部件和固定部件之间的相对位置不再因受力作用而发生偏移,完成静态定位。
当垂直坐标得到运动指令时,控制系统首先给锁紧装置发出解除锁紧状态指令,液压系统电磁阀动作给液压缸体上部快速进油,液压力克服碟簧弹力推动活塞向下运动,活塞杆带动杠杆系统完成松开动作。
由于液压缸的进出油口为同一个,所以在设计液压系统时,需要有两种基本回路,即压力控制回路和方向控制回路。压力控制回路实现增压和卸荷,方向控制回路控制油路中液流的接通、切断或变向。有了液压系统的支持,锁紧装置便能有效地进行控制和运行。
3. 细节设计分析
该锁紧装置在设计过程中,为了解决杠杆机构在受力发生微量偏转过程中,各施力点、受力点和支点位置不会因力的方向发生变化而受到刚性破坏,我们在细节上对这些位置采取了如下的“柔性化”处理,保证了机构的可靠性。
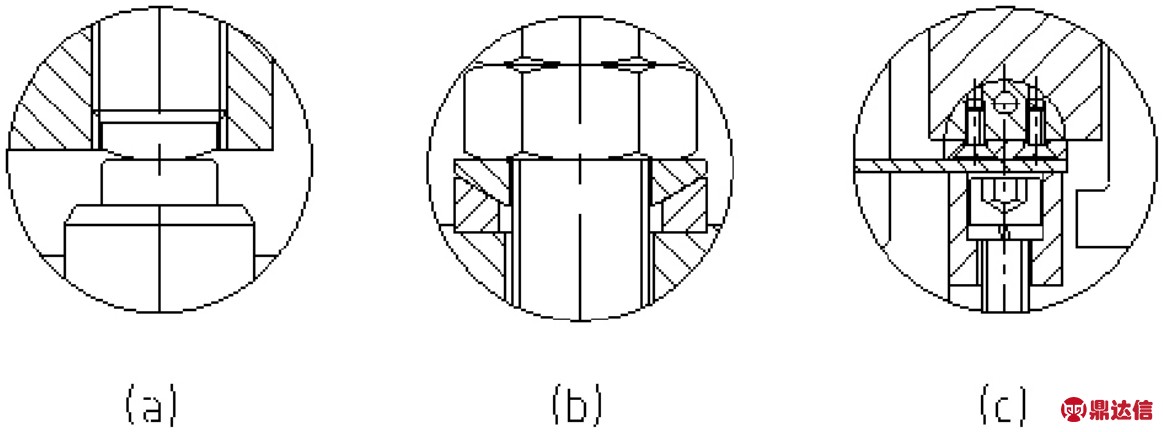
图2 受力点的细节设计
图2a为锁紧力输出作用到杠杆的细节设计。当碟簧输出的弹力顶起活塞杆向上作用于杠杆时,杠杆受力必然产生一个翻转力矩。将调整杠杆动力臂行程的调整螺钉端面设计为半球面形状,这样,即使杠杆不断改变受力方向也不会致使液压油缸因杠杆的翻转而影响其直线运动状态。
图2b为杠杆机构的理论支点使用了球面垫片来自动调整位置,使杠杆在支点的受力始终保持与其垂直并均匀分布。
图2c为夹紧端的细节设计。夹紧端要产生可靠的静摩擦力,夹紧块与夹紧片之间充分的贴合是产生最大静摩擦力的前提。固定式的夹紧块也会因杠杆机构的翻转运动影响与夹紧片的接触面积,故我们将夹紧块设计为图示中可摆动的形式,这样就使得在夹紧状态下,夹紧块与夹紧片之间始终保持一种自适应的最佳贴合状态,另外在摆动压块与锁紧板接触的面上固定了一层铜板,起到了耐磨损和保证锁紧时产生最大静摩擦力的有效接触面积。
4.锁紧机构的力学分析
我们可以把杠杆锁紧机构的受力情况简化为如图3示:
图3 受力简图
图示中:P为摆动压块作用于锁紧板上的压力;
T为杠杆所受的动力;
Q为液压油作用在活塞上的推力;
N为组合碟簧作用在活塞杆上的推力。
设计计算中我们用“倒推法”由所需夹紧力(即正压力P),根据设计空间结构调整杠杆动力臂b和阻力臂a的分配,最终计算出碟簧输出力N的大小及松开夹紧时液压系统所提供的推力Q。
通常情况下,对大型机床垂直运动部件的锁紧方式都采用两组导轨多点式对称布置,而且这样既可保证锁紧的可靠,也可将锁紧力进行分解,使单个锁紧机构在紧凑的设计尺寸下同样满足强度要求。
(1)假设分解到单个锁紧机构上需要克服的垂直载荷力为F,即单个机构所要产生的静摩擦力f与F为大小相等、方向相反。那么单个机构所要求产生的夹紧力为:
P=f/μ=-F/μ
(2)杠杆的受力计算:
假设杠杆机构所处的状态如图3所示,此时杠杆所受的动力为T,所受的阻力W与正压力P大小相等,方向相反,即W=-P。根据杠杆的计算公式有:
T*b=W*a
即:T*b=-P*a
根据锁紧机构在部件使用中所具有的空间尺寸,合理调整动力臂b和阻力臂a的尺寸,计算出锁紧动力T值,也就是需要碟形弹簧所提供的弹力N值。
(3)碟形弹簧的计算说明:
由于碟形弹簧具有轴向尺寸小、承载能力大以及非线性的载荷与变形特性等特点,非常适合本机构紧凑、输出大载荷的设计要求,故选用组合式碟形弹簧为机构提供稳定可靠的动力来源。
首先明确组合碟形弹簧在达到自由高度时的总载荷Fz=N=T,依据设计空间位置和运动行程来选用合适的碟簧尺寸,计算确定碟簧的组合方式、叠合片数和尺寸总变形量fz及组合碟簧的自由高度Hz。此计算过程是碟形弹簧设计最基本的计算,在此不再累述。
(4)液压系统的作用力。
液压系统所提供的液压力Q与碟簧对活塞的压力N相互作用,实现锁紧机构的松开与锁紧,所以液压系统提供的最大油压必须满足Q>N。
5. 结语
高精度直线滚动导轨和大螺距精密滚珠丝杠组合,被称为数控设备在承载导向和运动驱动方面的“最佳拍档”。即使这种最佳组合在被大型数控机床用于垂直运动部件安装时,其不可自锁且必须依靠其它手段才能实现位置确定的“短板”显现出并不完美的缺憾。我们在分析问题明确目标后所设计出独立可靠的锁紧装置,可以说是小设计解决了大问题,使直线滚动导轨在垂直安装应用过程中实现了“扬长补短”的实际效果。 □


