
摘要 直流微网中控制母线电压稳定是核心问题,在母线受到不同时间尺度的功率扰动时显得尤为重要。针对直流母线瞬时功率不平衡问题,结合超级电容高功率密度特性,将电容电荷平衡控制思想引入超级电容接口双向DC-DC变换器,以实现母线电压在负载大扰动下的快速恢复。在现有单向电流DC-DC变换器的电容电荷平衡控制基础上,将间接预测电容电流变化规律的思路进行扩展和优化,得出一般的节点电流替代法及相应的控制律,达到快速控制双向DC-DC变换器的目的。给出了电容电荷平衡复合控制策略的具体实现过程,并利用平均电流模式控制和滞环电流限幅环节实现对接口变换器的双端稳定控制。最后通过仿真和样机实验验证了所提复合控制策略的有效性。
关键词:直流微网 超级电容 双向DC-DC变换器 电容电荷平衡控制 瞬态响应
0 引言
作为对集中式、远距离输电传统电力系统的扩展和补充,直流微网(DC Microgrids)将具有直流耦合特性的分布式能源(Distributed Energy Resources, DER)、储能系统(Energy Storage Systems, ESS)和现代电子负载集成为一个可控的整体[1-3]。图1所示为直流微网的典型配置,其中直流母线为能量汇集和功率交换的中间媒介。由于光伏、风电等微源的功率间歇性和负载扰动会威胁母线电压稳定,因此母线电压成为评价直流微网电能质量的重要指标[4-6]。已有研究表明,将ESS单元通过双向DC-DC变换器连接至直流母线,在微源和负载之间形成能量缓冲器,可在一定程度上抑制母线电压的波动,提高直流微网供电的可靠性[7-9]。通常对于分布式微源出力波动的抑制,要求ESS环节的响应时间尺度为秒至分钟级,而对于负载扰动的抑制则要求ESS的响应时间尺度提高至毫秒级[10]。直流微网发生负载大扰动时,需要ESS单元在母线侧吞吐较高的瞬时功率,以快速补偿母线上源荷两侧的瞬时功率差,防止母线电压产生较高的瞬时过冲或跌落。与蓄电池相比,超级电容器具有功率密度大、循环寿命长、充放电速度快等优点,对直流微网的瞬时功率平衡控制具有先天优势[11-13]。双向DC-DC变换器作为接口变换器,允许超级电容在宽电压范围内工作,提高了其能量利用率和使用寿命,然而双向变换器的动态性能却影响着超级电容对母线电压波动的响应时间。因此,如何提高双向DC-DC接口变换器的动态性能,成为值得研究的重要问题[14-16]。
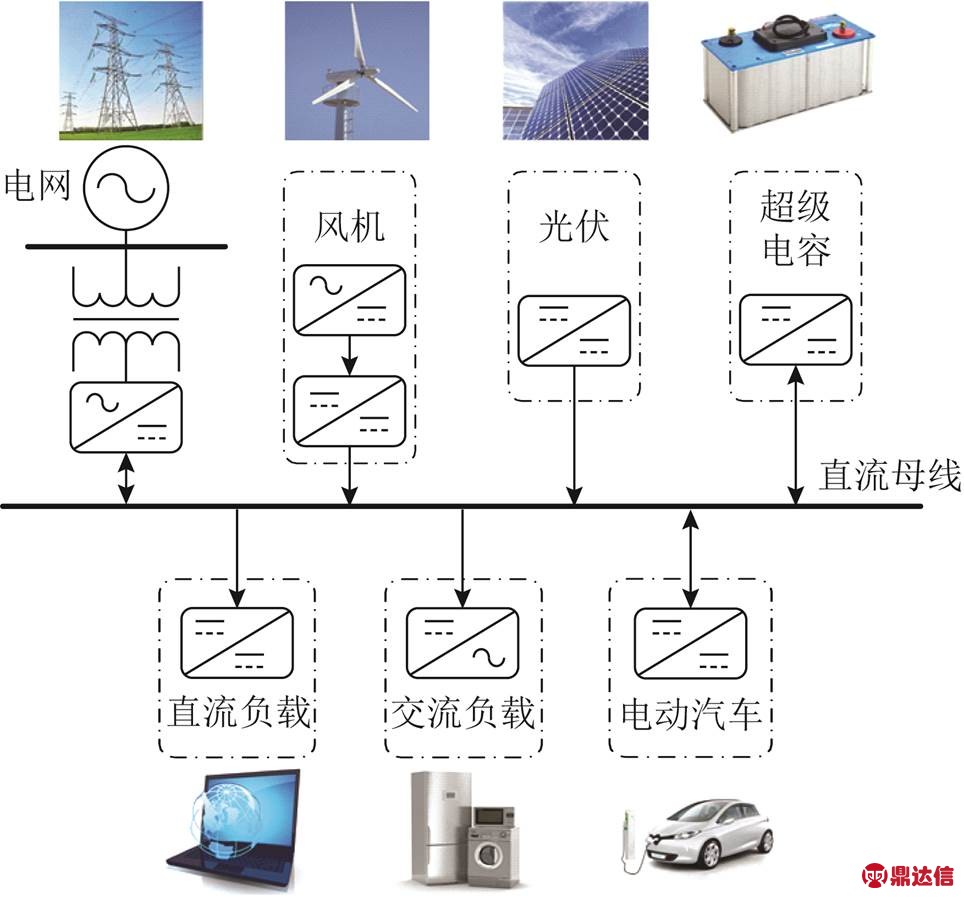
图1 直流微网的典型配置
Fig.1 Typical configuration of a DC microgrid
非线性控制策略突破了传统线性控制的带宽限制,可从一定程度上改善DC-DC变换器的瞬态响应性能[17,18]。目前大多数非线性控制是基于边界控制理论,而切换面的选择是边界控制理论的核心问题[19]。由于不同类型的控制器在调节时间和鲁棒性等特性方面有很大差异,因此切换面的选择是多样的,典型的如滑模控制和滞环控制[20]。文献[21,22]将滑模控制应用于控制双向DC-DC变换器,使得系统在大信号下保持稳定且对系统的参数变化有很好的鲁棒性,但却存在输出抖动和在切换面上开关频率较高等问题。文献[23,24]采用滞环控制实现对双向DC-DC变换器的控制,具有控制简单和鲁棒性强等特点,但同样存在输出抖动和开关频率抖动等问题。利用几何面积法简化切换面的复杂计算,进而得到近似的最优控制,典型的如时间最优控制[20]。文献[19,20]通过时间最优控制实现DC-DC变换器近似最佳的暂态响应,但开关面的选择比较依赖变换器系统参数和容差,进而降低了控制器的鲁棒性。
电容电荷平衡控制(Charge Balance Control, CBC)是一种基于电容电荷平衡原理的简化时间最优控制,在一定程度上降低了对系统参数的依赖[25]。目前,CBC的控制思想已被应用于控制单向DC-DC变换器。文献[26,27]提出一种变结构电容电荷平衡控制策略,但根据控制逻辑来控制Buck变换器的电容电荷平衡辅助电路,存在反复切换的行为,增加了功率管的开关损耗。文献[28,29]将电容电荷平衡控制算法用于控制Buck变换器,在负载扰动时具有优良的动态响应特性。但由于控制策略基于电压峰值点检测,需要复杂的模拟检测电路,控制算法缺乏通用性。文献[30,31]在限制控制占空比的条件下,将电容电荷平衡控制算法分别扩展应用于Buck-Boost变换器和双管正激变换器。但控制过程中开关管的动作次数增加,开关损耗增大。文献[32]提出一种基于电容电荷平衡控制的数字控制算法应用于Boost变换器,通过间接预测电容变化规律来达到研究电容电荷平衡的目的。该控制算法简单且计算量少,适合数字控制实现,但控制对象仅针对单侧输出滤波电容电压。综上所述,现有CBC的控制应用还局限于单向功率输出的控制,仅针对输出电压单侧调节。对于母线电压快速恢复这一应用场合,当由超级电容的输出功率控制切换到输入功率控制时,作为控制对象的母线侧电容将由输出滤波电容变成输入滤波电容,控制对象的角色发生改变,原有的几何面积法以及相应的控制律也将不再适用。因而现有CBC控制无法直接运用于双向DC-DC接口变换器的功率控制场合。
为了实现母线电压快速恢复,解决瞬态功率不平衡带来的母线电压波动问题,本文拟通过提高与超级电容接口双向DC-DC变换器的瞬态响应来解决。将文献[32]控制单向电流的间接预测电容电流变化规律的思想进一步扩展和优化,得出更一般的节点电流替代法及相应的控制律,并达到控制双向电流的目的,最终得到一种适用于双向DC-DC变换器控制的CBC和传统线性控制结合的复合控制策略,即:大扰动的暂态过程切换到相应的CBC控制,实现快速调节;小扰动过程采用增量式PID产生互补PWM波,其中线性PID控制可以保持良好的稳态控制精度,不存在输出抖动问题,同时开关管的互补驱动又能够实现较小暂态时双向变换器两种工作模式的平滑切换。实现功率双向流动的同时能够确保系统具有良好的动态性能。
本文首先分析CBC控制应用于双向DC-DC变换器中存在的问题,然后给出双向CBC控制策略的数学推导过程,接着阐述复合控制策略的实现步骤,最后通过仿真和200 W样机实验,验证CBC复合控制策略的有效性。
1 问题描述
由CBC控制原理可知[29],对于DC-DC变换器,稳态时,一个开关周期内电容电流的平均值等于零。因此,在开关周期的开始和结束,变换器的输出电压值基本不变。CBC原理也可扩展到整个暂态过程,即暂态过程结束时DC-DC变换器满足的电荷平衡条件可表示为
 (1)
(1)式(1)的积分形式可表示为
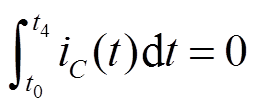 (2)
(2)式中,iC(t)为直流母线侧的滤波电容C的电流;t0和t4分别为暂态过程的起始时刻和结束时刻。
为了实现双向Buck-Boost接口变换器最佳的动态响应过程,本文拟得到一种适用于双向功率流动控制的数字式复合控制策略,通过控制开关管在一个开关周期内连续导通和关断来实现最佳的动态响应过程。图2给出了双向DC-DC变换器采用CBC控制的示意图,其在两种工作模式下的响应波形如图3所示。
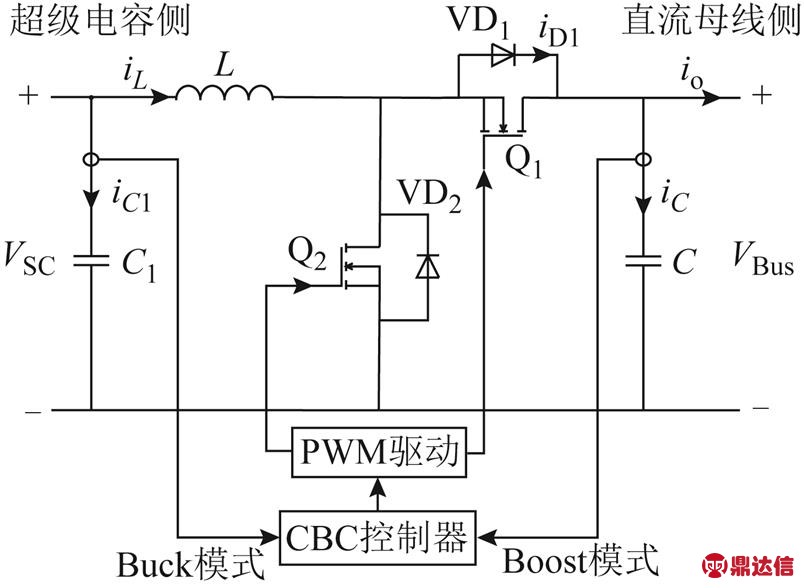
图2 双向变换器CBC控制的示意图
Fig.2 Diagram of CBC control for bidirectional converter
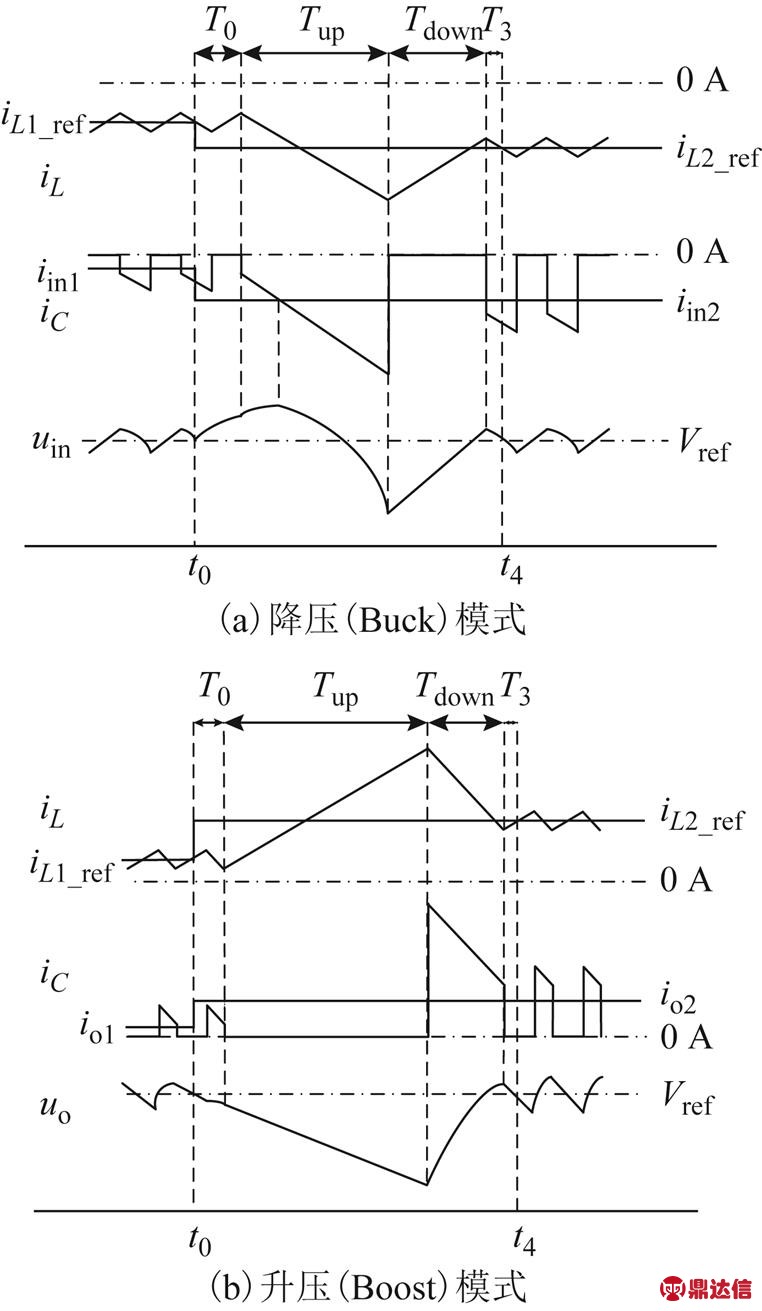
图3 双向变换器CBC控制的响应过程
Fig.3 Response process of CBC control for bidirectional converter
观察波形可发现将CBC控制应用于双向Buck-Boost接口变换器主要存在以下问题:
1)CBC控制策略在两种工作模式下均需控制母线侧电容C的电荷平衡,且基于电压峰值点检测的CBC控制策略实现困难。现有CBC控制的控制对象都是输出电容,但由式(2)的电容电荷平衡关系可知,Buck模式下控制目标为超级电容两端电压,不能满足母线电压恢复的要求,故CBC控制器需改为控制母线侧电容C。同时根据图3,两种工作模式下电容电流的波形变化均不规则,Buck模式下还存在不止一个电压峰值点,且电容电流为负数,这些均给模拟积分器的电压峰值点检测带来困难。
2)原有单向稳态电流预测方法不适用于双向DC-DC变换器,需提供新的稳态电流值预测方法及计算公式,且要考虑选取适当的电流参考方向。在图2所示的电流参考方向下,图3a中Buck模式的电容电流为负数,不方便面积计算。同时,数字控制利用几何面积法计算电容电荷量的积分时,需提前预测电感电流和输入/输出电流新的稳态值,故需要提供相应的预测方法及计算公式。
3)两种工作模式如何采用统一的控制器,以及相应开关管导通和关断时间如何数字量化值得研究。由图3可知,两种工作模式的暂态控制过程类似,如何通过一定的方法得出通用的控制律,进而得到统一的控制器值得研究。而且开关管导通时间Tup和关断时间Tdown通常不为整数开关周期,如何进行数字量化且易于实现也是问题。
4)最后,超级电容作为储能设备在维持母线电压稳定的同时,还必须确保自身安全稳定地运行,能够兼顾母线电压快恢复与超级电容的过电压欠电压保护以及最大持续工作电流限幅。
2 双向CBC控制策略推导
2.1 充电Buck模式的理论推导
当分布式微源的瞬时输出功率过剩或直流微网的负载突减时,直流微网的母线电压将会骤升,此时超级电容接口双向DC-DC变换器工作在充电降压(Buck)模式;相反地,当分布式微源的瞬时输出功率不足或直流微网上的负载突增时,直流微网的母线电压将会骤降,这时双向DC-DC变换器工作在放电升压(Boost)模式。本文根据超级电容接口双向Buck-Boost变换器的两种工作模式重新选定电流参考方向,如图4所示,以此推导两种工作模式下的CBC控制过程。
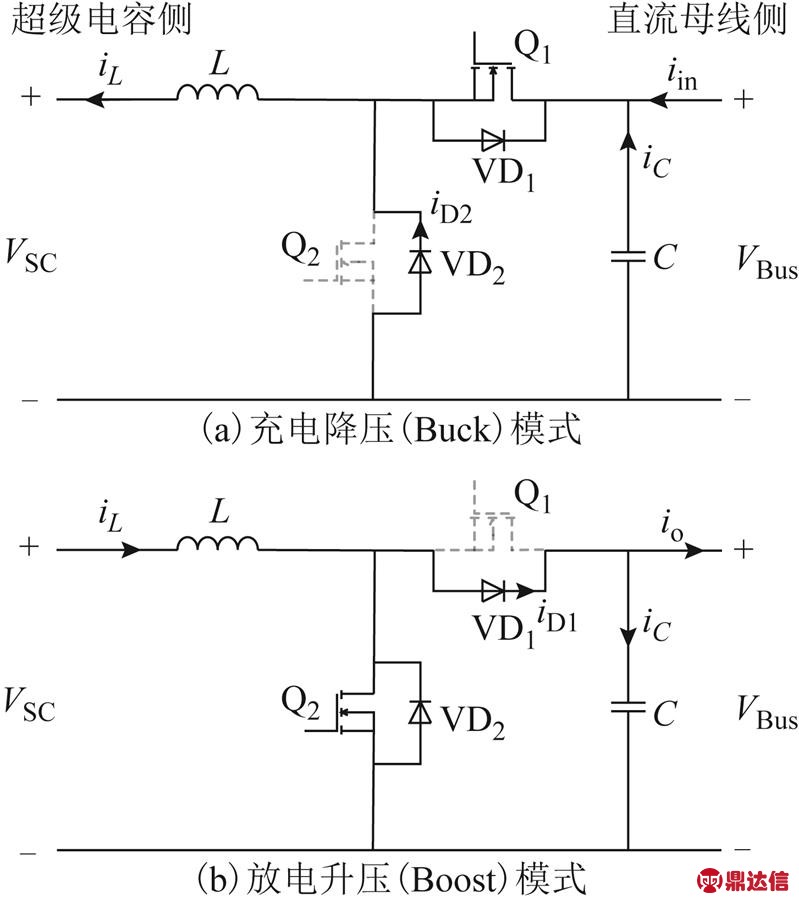
图4 双向Buck-Boost变换器的两种工作模式电路
Fig.4 Two operation mode circuits of the bidirectional Buck-Boost converter
当直流母线负载电流发生正跃变时,双向Buck-Boost变换器工作在Buck模式下,其动态响应过程如图5所示。稳态时采用传统的线性控制,在t0时刻发生母线电流正跃变。t1时刻(检测存在延时)检测到母线电流正跃变的发生,切换到CBC控制,将相应开关管的占空比置为最大值100%,并记录此时的电感电流和母线侧电压采样值。间隔设定的T1a时间段在时刻ta再记录一次电感电流和母线侧电压采样值,此时即可提前预测相应开关管的占空比置为最小值0%的t2时刻和CBC控制结束t3时刻,之后切回传统的线性控制,电感电流在t4时刻达到新的稳态值,整个暂态过程结束。
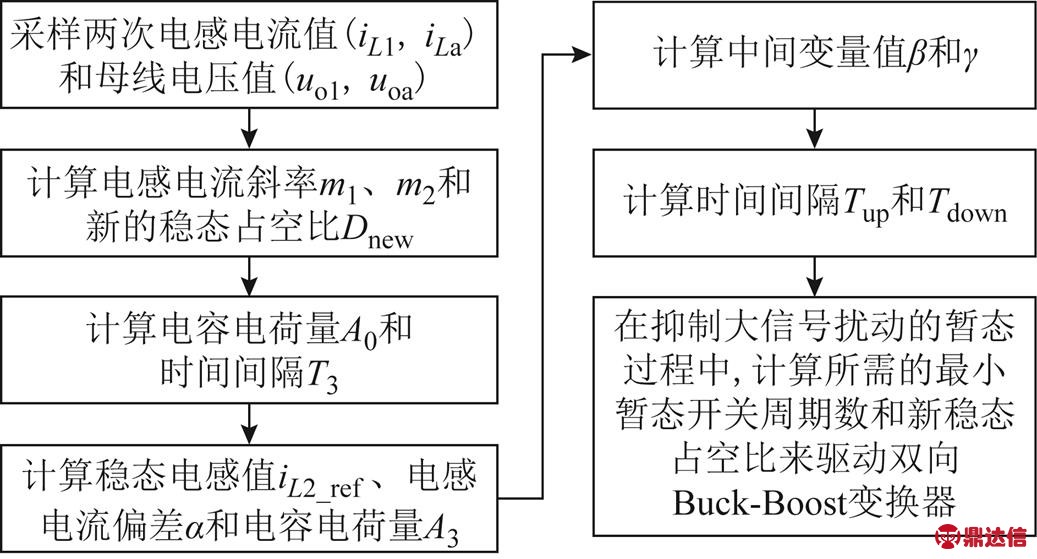
图5 母线电流正跃变时双向变换器的动态响应过程
Fig.5 Dynamic response of bidirectional converter to a positive bus current step
根据KCL,图4a中iC可表示为
 (3)
(3)式中,iL和iin分别为Buck模式下的电感电流值和直流母线侧的输入电流值;iD2为流过续流二极管VD2的电流值,可表示为
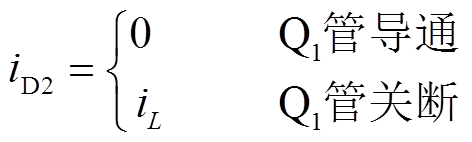 (4)
(4)结合式(2)和式(3),暂态过程中对母线侧滤波电容C的充放电电荷量的积分计算,可简化为对图5中的各几何图形阴影面积的计算。接下来将暂态过程结束时变换器满足的电荷平衡条件,定量细化为电感电流关系式和电容电荷的充放电面积公式两大关键表达式。
首先,为了实现最佳的动态响应,当变换器的动态调节过程在t3时刻结束时,电感电流达到新的稳态值。因此,应该满足
 (5)
(5)式中,m1、m2分别为电感电流上升/下降斜率,Buck模式下m1、m2已知,m1=(uin-uo)/L,-m2=-uo/L;uin为母线电压VBus,uo为超级电容端电压VSC;iL_begin和iL_end分别为t1和t3时刻的电感电流值;Tup和Tdown分别为电感电流上升和下降时间。
其次,当变换器从直流母线电流正跃变中恢复过来时,直流母线侧的滤波电容C的电荷充放电面积相等,可用式(6)表示。
 (6)
(6)式中,A0为T0时间段内母线侧滤波电容的充电电荷量;A1为Tup时间段内电感电流线性增加时的放电电荷量;A2为Tdown时间段内电感电流线性减小时的充电电荷量;A3为当直流母线电压在CBC控制结束后恢复到稳态值Vref时所需放电电荷量。其中电容的充电面积A0可根据T0时间段内电容电压的变化量来估计,而A1、A2和A3可由几何面积公式求得,具体求解为
 (7)
(7) (8)
(8) (9)
(9) (10)
(10)式中,iL1和uin1分别为t1时刻的电感电流值和母线侧电容C的端电压;Res为电容C的等效串联电阻值。母线电流正跃变发生后,从直流母线侧吸收的新稳态电流值iin2可表示为
 (11)
(11)式中,iLa和uina分别为ta时刻的电感电流值和电容C端电压值;T1a为t1时刻和ta时刻之间的电感电流和电容C电压的采样时间间隔。
将式(8)与式(9)代入式(6),可得
 (12)
(12)结合式(5)和式(12),导出Tup和Tdown分别为
 (13)
(13) (14)
(14)式中,α为CBC控制结束时电感电流的差值(iL2=iL2_ref-iL_ripple/2),连同中间变量 和
和 可分别表示为
可分别表示为
 (15)
(15) (16) (17)
(16) (17)2.2 放电Boost模式的理论推导
与Buck模式的推导类似,图6给出了直流母线电流负跃变的暂态响应过程,此时,双向变换器工作于放电Boost模式。类似的单向电流Boost电路分析过程最早由文献[32]提出,本文在其基础上,将起始采样点由固定的稳态电感电流最小值时刻扩展为任意时刻发生,使得更贴近实际电路,并优化了部分面积计算公式,计算结果得到优化和校正。
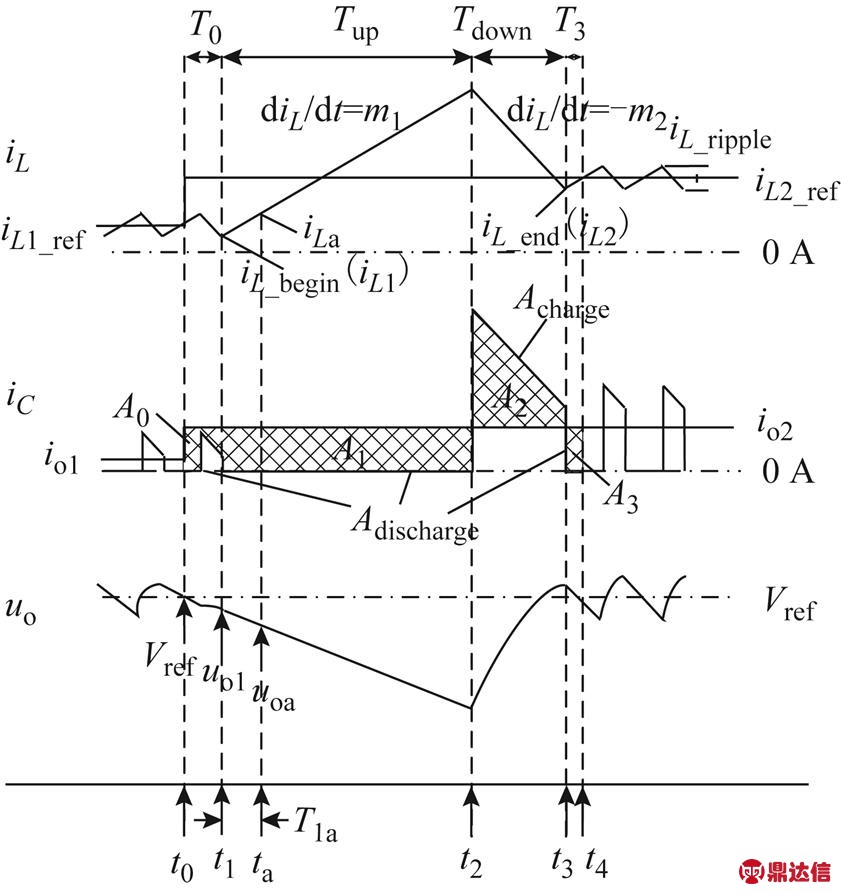
图6 母线电流负跃变时双向变换器的动态响应过程
Fig.6 Dynamic response of bidirectional converter to a negative bus current step
根据KCL,式(2)中的iC(t)和流过续流二极管VD1的电流值iD1在Boost模式下可分别表示为
 (18) (19)
(18) (19)式中,iL和io分别为Boost模式下的电感电流值和母线侧的输出电流值。
暂态过程结束时,电感电流需要达到新的稳态值,同时直流母线侧的滤波电容C的充放电面积相等,可表示为
(20) (21)
(21)式中,io2为当母线电流负跃变发生后,双向Buck-Boost变换器需向直流母线侧注入的新稳态电流值。A0可根据T0时间段内电容C端电压的变化量来估计,A3可由几何面积公式求得,因而得到
 (22)
(22) (23)
(23) (24)
(24)通过求解式(20)和式(21),得到
(25) (26)式中,Boost模式下的电感电流上升/下降斜率已知,m1=uin/L,-m2=-(uo-uin)/L。此模式下,uin表示超级电容端电压VSC,uo表示直流母线电压VBus。中间变量 、和可分别表示为
、和可分别表示为
(27) (28)
(28) (29)
(29)结合上述推导两种工作模式下的控制律,可总结出图7所示的CBC控制策略实现步骤。
图7 CBC控制策略的实现步骤
Fig.7 Implementation steps of CBC control strategy
3 CBC复合控制策略的实现
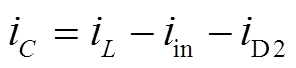
3.1 CBC复合控制策略的控制流程
前述CBC控制主要针对双向变换器在负载大扰动下的瞬态恢复过程,还需结合线性调节确保稳态控制精度,以兼顾瞬态响应与稳态精度的综合要求[28-32]。本文沿用非线性与线性相结合的控制思路,其中非线性控制采用CBC控制实现母线电压的快速恢复,而线性控制采用平均电流模式(Average Current Mode, ACM)控制实现稳态无静差调节,两种控制模式的切换由母线电压变化量设定的阈值来确定。下面具体介绍CBC复合控制策略如何实现。
图8为双向变换器CBC复合控制策略的流程图。通常直流微网中源荷瞬时功率的差额会通过母线电容充放电进行补偿,从而引起母线电压的骤升或骤降,也同时表现为微源与负载电流之间的不平衡,即母线电流的不平衡。为了判断母线电流是否发生大幅度跃变,控制器会在每个开关周期检测直流母线电压值:当母线侧电压变化量超过给定的阈值时,控制电路切换到CBC模式,超级电容以最快的速度充电或放电取决于母线电压瞬时的上升或跌落;否则当母线侧电压变化量小于给定的阈值时,双向Buck-Boost变换器继续工作于ACM控制模式。
据世界黄金协会中国区董事总经理王立新介绍,GOLDHUB是一个纯公益性平台,首次为黄金投资者提供便利的单一在线资源库互动工具和黄金行业讯息成果,以协助其完成投资决策。
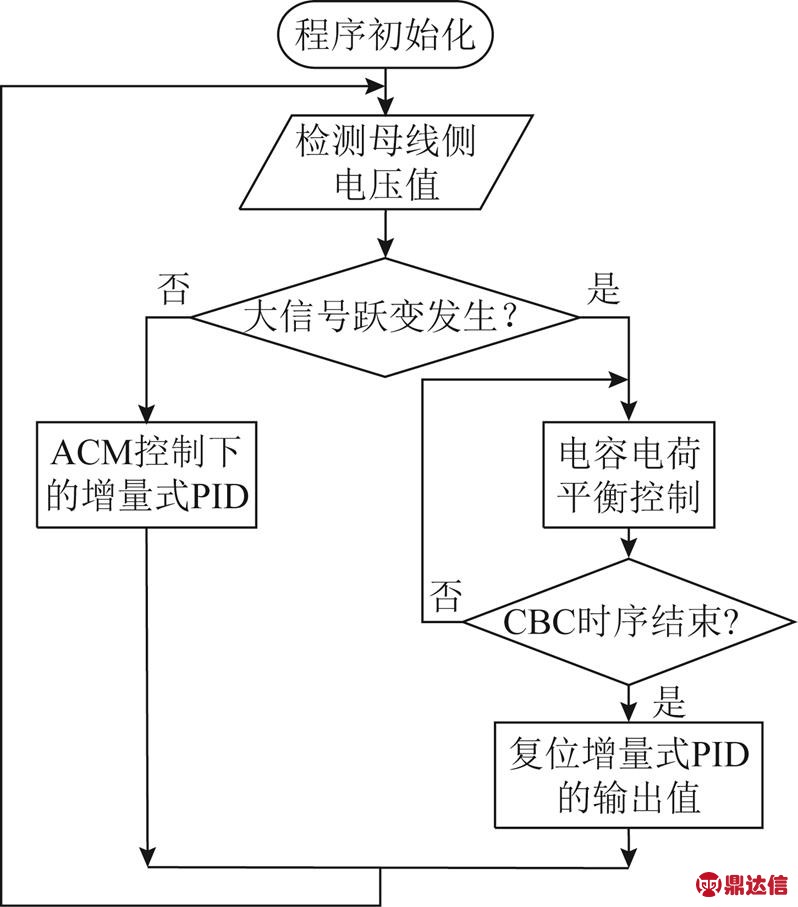
图8 CBC复合控制策略的控制流程
Fig.8 Control flow chart of CBC hybrid control strategy
图9给出了DSP中实现CBC控制的时序,假设(Tup-T1a)大于(M-1)Ts且小于MTs,(Tup+Tdown-T1a)大于(N-1)Ts且小于NTs,M和N均为整数,T1a为两次电流电压采样时间间隔(大小通常为半个开关周期,T1a时间段内占空比已经被置为100%执行,故后续时序中应扣除这段时间)。为了实现最佳暂态响应,在第1个至第(M-1)个开关周期内,占空比被置为100%。相应地,在第(M+1)个至第(N-1)个开关周期内,占空比被置为0%。D表示第M个开关周期内占空比为100%的时间与开关周期Ts之比,D′表示第N个开关周期内占空比为0%的时间与开关周期Ts之比,可通过对DSP的相位偏置寄存器进行置位得到,分别表示为
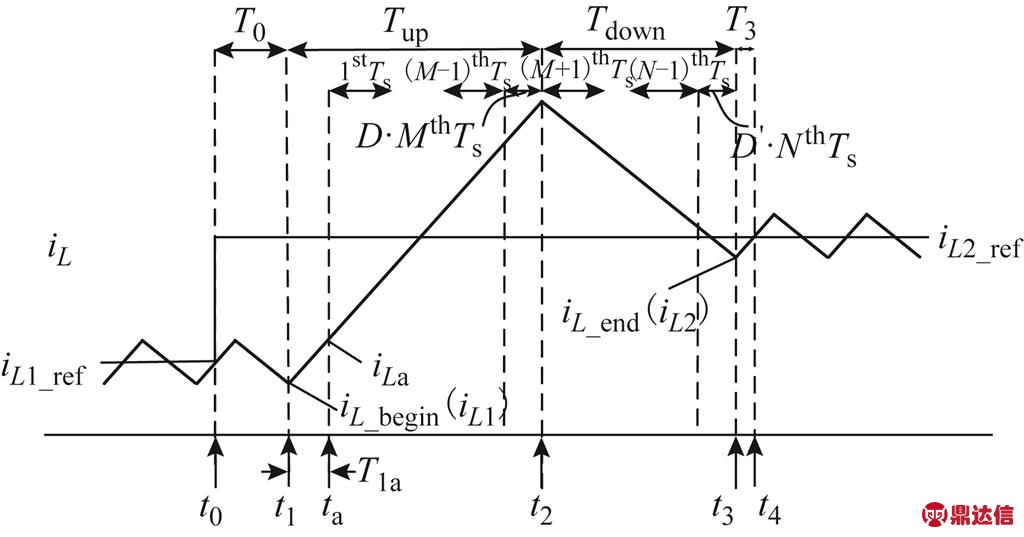
图9 DSP中构建CBC控制时序的原理
Fig.9 Schematic diagram of constructing CBC control sequence in DSP
 (30)
(30) (31)
(31)3.2 超级电容电流限幅环节的实现
对于超级电容接口DC-DC变换器的控制,除了满足直流微网母线电压的调节要求,还应确保超级电容自身的安全稳定运行,需考虑控制环路中加入必要的保护功能。本文在ACM控制器的基础上,借鉴饱和函数的思想[33],将其应用于ACM控制器的滞环电流限幅环节,实现对超级电容的过电压欠电压保护以及最大持续工作电流的限幅。图10所示为包含超级电容保护功能的ACM控制框图,通过加入滞环电流限幅,结合互补PWM输出控制,构成能够实现超级电容接口变换器双端口安全稳定运行的ACM控制器。
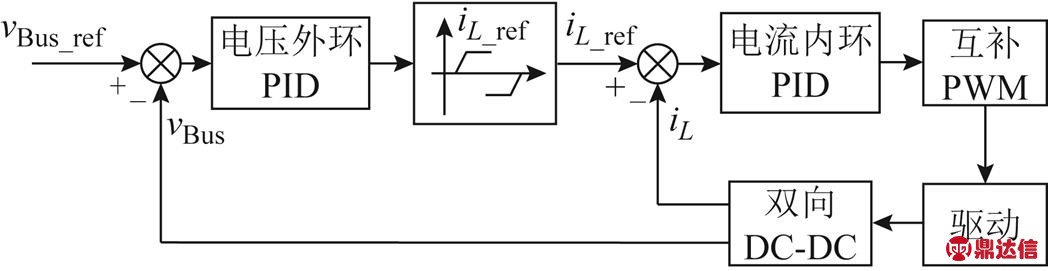
图10 加入滞环电流限幅的ACM控制框图
Fig.10 Block diagram of ACM controller with hysteresis current limiter
对于滞环电流限幅环节的具体实现原理如图11所示。

图11 滞环电流限幅环节的实现
Fig.11 Implementation of hysteresis current limiter
可以看出,限幅环节主要由充电与放电饱和限流函数包围的滞环函数构成。当超级电容放电至区间[VSCmin, VSCmin+Δv]时,超级电容的放电饱和限流函数输出电流参考值为最大正向放电电流ISCmax,可表示为
(32)当超级电容充电至区间 [VSCmax-Δv,VSCmax] 时,超级电容的充电饱和限流函数输出电流参考值为最小负向充电电流ISCmin,可表示为
(33)式中,ISCRate为最大持续工作电流;VSCmin和VSCmax分别为超级电容完全退出工作状态的端电压下限和上限;为超级电容开始逐渐退出当前工作状态的电压阈值,主要用于控制饱和限流函数输出的电流参考值的绝对值呈线性减小。
假设选用超级电容的参数为16 V/58 F,其最大持续工作电流为19 A,那么从安全裕量和储能利用率等方面综合考虑,超级电容的正常工作电压范围[VSCmin+Δv, VSCmax-Δv]可选定为9 ~15 V,同时可选定13 V为超级电容的理想额定工作电压。当超级电容电压低于(VSCmin+Δv)时,控制器开始进入欠电压保护状态;当超级电容电压高于(VSCmax-Δv)时,控制器开始进入过电压保护状态;当超级电容电压处于9 ~15 V时,控制器只需限制超级电容的充放电电流不超过最大持续工作电流ISCRate即可。故ISCRate取19 A,VSCmin和VSCmax分别取8.5 V和15.5 V,而Δv取0.5 V。
4 仿真与实验验证
4.1 仿真验证
为了初步验证所提CBC复合控制策略应用于超级电容接口DC-DC变换器的有效性,首先基于PSIM软件环境将CBC复合控制算法与传统ACM控制模式进行对比仿真。其中,48 V直流微网的主要仿真参数见表1,同时为了简化分析,仿真时忽略母线侧滤波电容的等效串联电阻。如3.1节所述,当母线电压值在设定阈值范围内变化时,双向Buck-Boost变换器采用ACM控制。为了方便暂态过程结束后新稳态参数的置位,实现从暂态到稳态的平滑切换,ACM控制通过数字增量式PID来实现,输出互补PWM波来实现双向变换器的双向功率流动。
表1 48 V直流微网仿真参数
Tab.1 Simulation parameters of 48 V DC microgrid
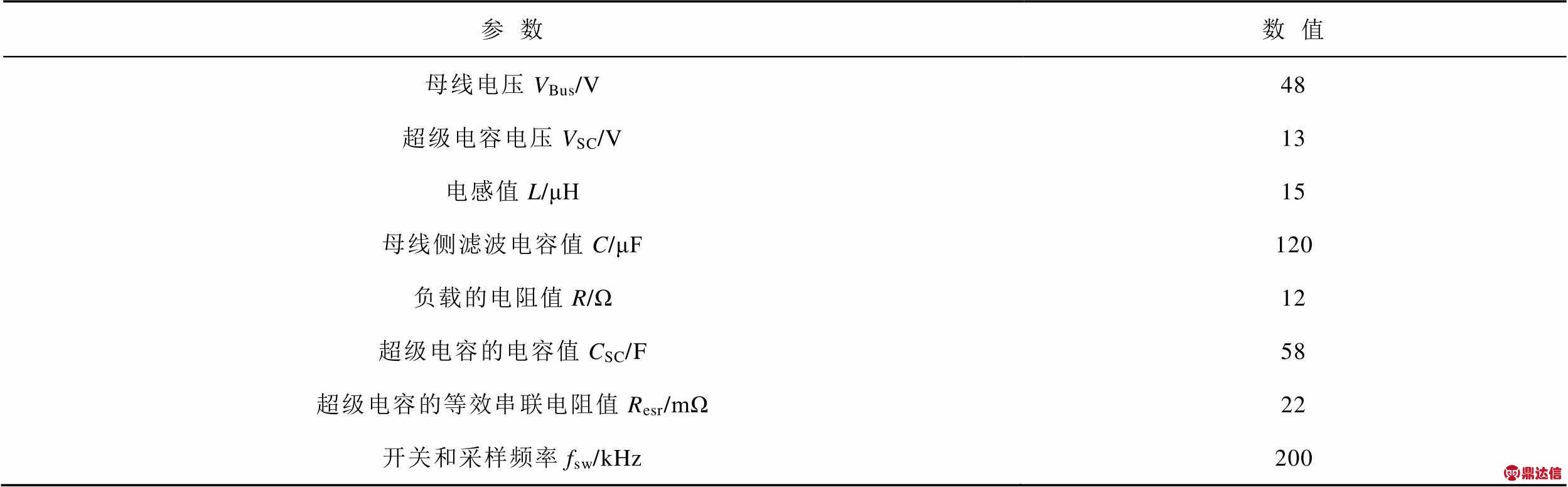
图12给出了两种工作模式下分别采用CBC复合控制和ACM控制的仿真对比。从图12a可以看出,母线电流在0.01 s时发生正跃变,充电电感电流从3.6 A变化到11.6 A,双向Buck-Boost变换器均工作在Buck模式,从直流母线侧吸收功率。传统ACM控制模式下,母线电压的超调量为0.66 V,调节时间达到400 μs。而在CBC复合控制模式下,跃变发生后的电感电流在达到新的稳态值之前,母线电压先上升;电感电流超过新的稳态值之后,母线电压开始下降;母线电压的超调量为0.10 V,欠调量为0.10 V,电压的波动量相对减小了84.85%。调节时间为14.41 μs,为ACM控制模式的3.60%。图12b是母线电流在0.01 s时发生负跃变的仿真结果,此过程中放电电感电流从3.6 A变化到11.6 A,双向Buck-Boost变换器均工作在Boost模式,向直流母线侧注入功率。可以看出,在传统ACM控制模式下,母线电压的欠调量为0.91 V,调节时间为557 μs。而在CBC复合控制模式下,母线电压的欠调量为0.53 V,相对减小了41.76%,同时调节时间减小到26.93 μs,仅为ACM控制模式的4.83%。
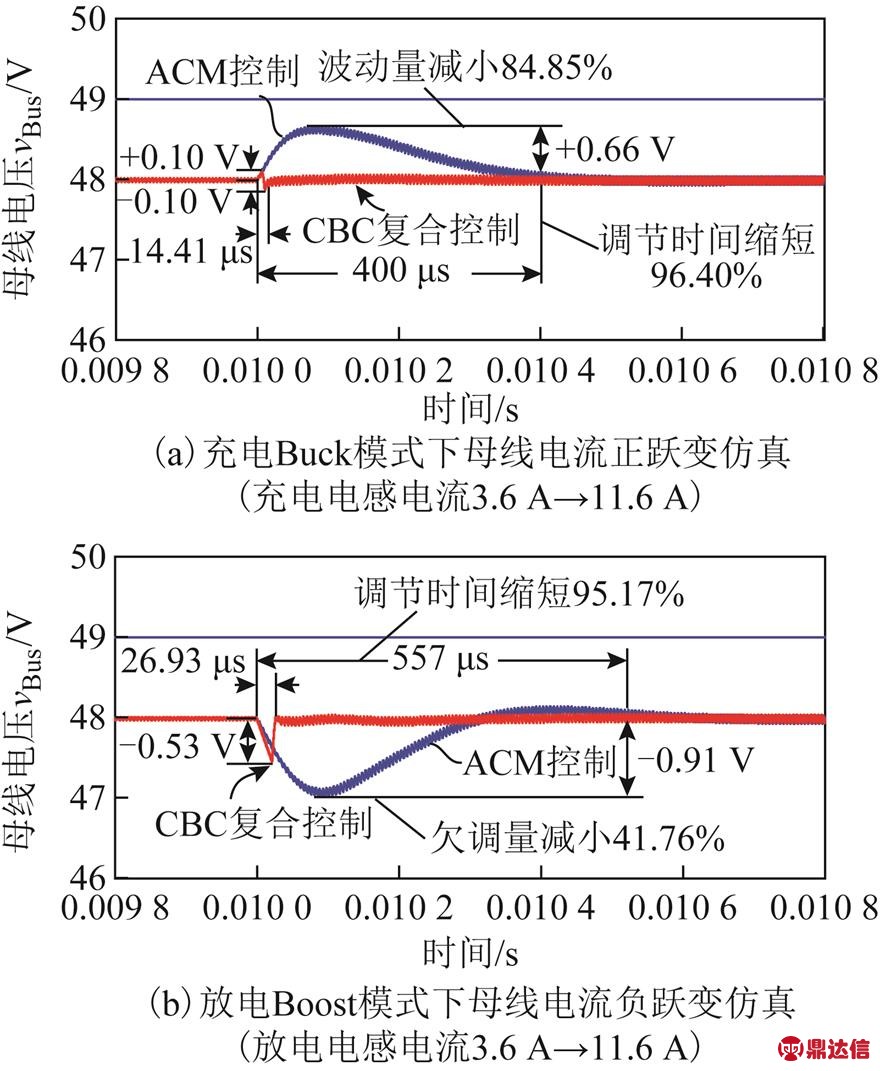
图12 两种控制策略下的母线电压响应仿真对比
Fig.12 Simulation comparison of bus voltage response under the two control strategies
4.2 实验验证
为进一步验证所提CBC复合控制策略改善双向Buck-Boost变换器动态性能的效果,同时验证控制器对超级电容的过电压欠电压保护性能,设计了额定功率为200 W的实验测试平台,其中CBC复合控制采用DSP28335实现。实现框图如图13所示,实验参数与仿真基本一致,超级电容器采用最大工作电压为16 V、额定电容量为58 F的Maxwell超级电容模组。图14给出了实验样机图片。实验过程中母线电压纹波值最大不超过100 mV,为了判断母线电流是否发生大信号跃变并防止产生误判,实际电压阈值取其1.2倍,即120 mV。
首先,图15给出了超级电容器组的过电压与欠电压保护实验波形。由图15a可以看出,在超级电容端电压接近15 V电压保护阈值时,此时若母线电流发生正跃变,超级电容的充电电流(即电感电流iL)增加。超级电容内阻使得其端电压在短时间内突增而超过15 V的过充保护电压阈值,限流环节开始起保护作用,控制超级电容端电压不超过16 V(理论设定不超过15.5 V)。超级电容的充电电流相应地被限制,其储能能力减弱,致使母线侧的盈余功率不能实时被超级电容吸收,母线电压上升。同理,由图15b可见,当超级电容端电压接近9 V时,若母线电流发生负跃变,则超级电容的放电电流增大。内阻使得超级电容端电压在短时间内突减而低于9 V的过放保护电压阈值,限流环节开始控制超级电容端电压不低于8.5 V。超级电容的放电电流相应地被限制,超级电容释能减弱,导致母线侧的缺额功率不能实时由超级电容提供,母线电压下降。
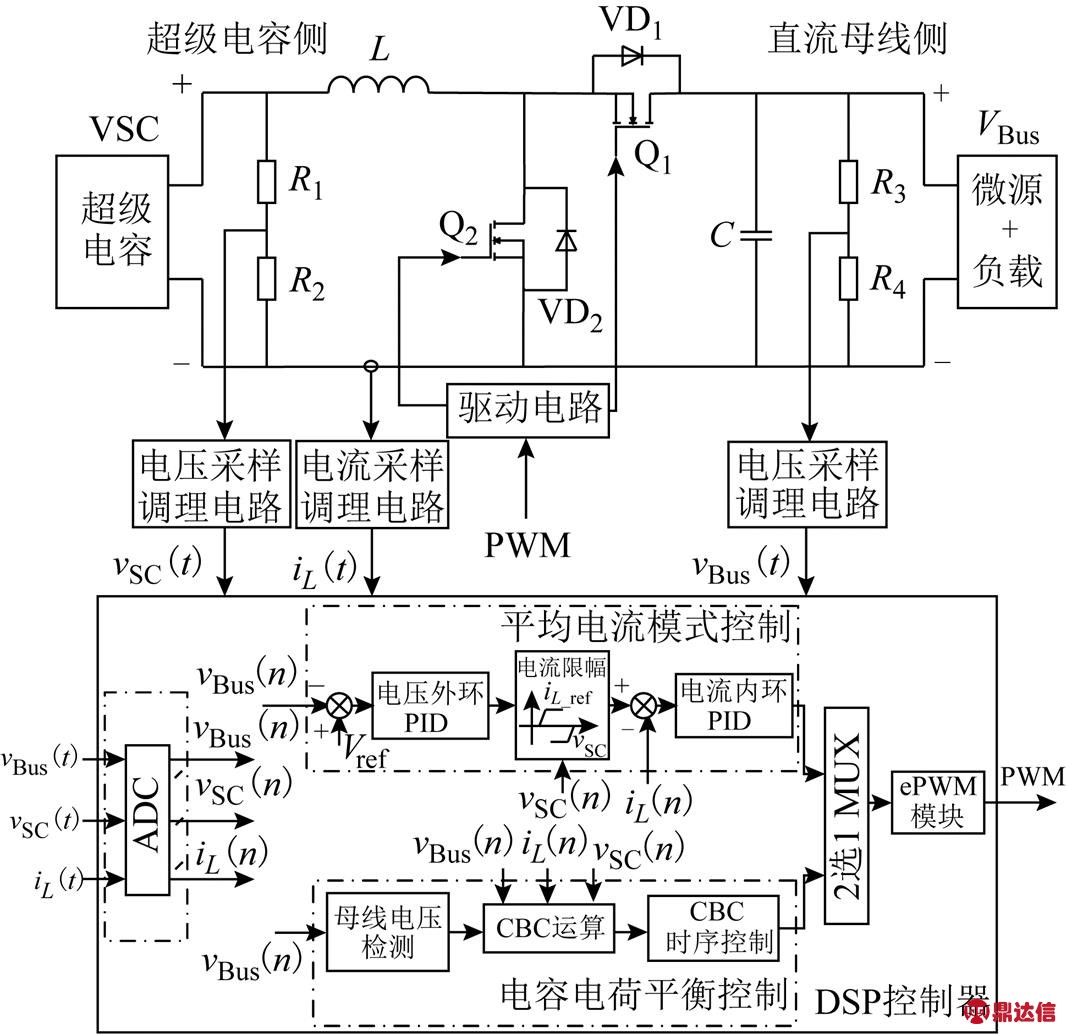
图13 CBC复合控制策略软硬件实现框图
Fig.13 Block diagram of CBC hybrid control strategy for software and hardware implementation
图14 CBC复合控制超级电容接口双向DC-DC变换器的实验测试平台
Fig.14 Experimental platform of CBC hybrid control of supercapacitor-interfacing bidirectional DC-DC converter
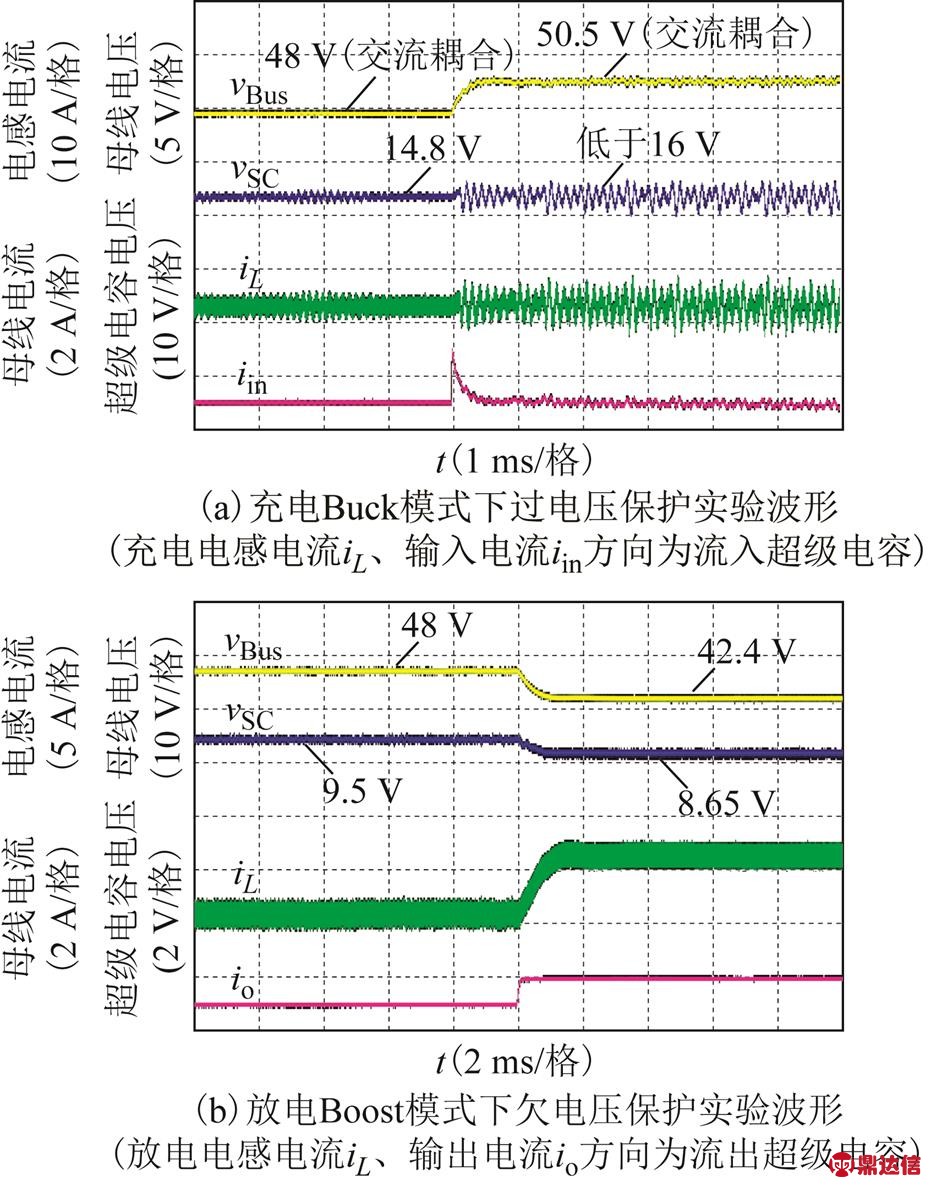
图15 超级电容器组过电压与欠电压保护实验波形
Fig.15 Experimental waveforms of overvoltage and undervoltage protection of supercapacitor bank
其次,图16与图17分别给出了ACM控制与CBC复合控制的实验结果。对比图16a和图17a发现,当母线负载电流正跃变(充电电感电流的稳态值由3.6 A变化到9.6 A)时,与ACM控制相比,采用CBC复合控制策略可使母线电压的超调量减小1.75 V,相对减小了89.74%,同时调节时间缩短了1 174.2 μs,仅为ACM控制的1.33%。类似地,对比图16b和图17b可看出,当母线电流负跃变(放电电感电流的稳态值由3.6 A跃变至11.4 A)时,CBC复合控制的实验结果相对于ACM控制,前者母线电压的欠调量减小了1.17 V,相对减小了60.31%,同时调节时间减小了570.2 μs,仅为ACM控制模式的4.97%。考虑到实际电路元器件参数偏差和实验过程的非理想因素,实验结果基本与仿真结果保持一致。
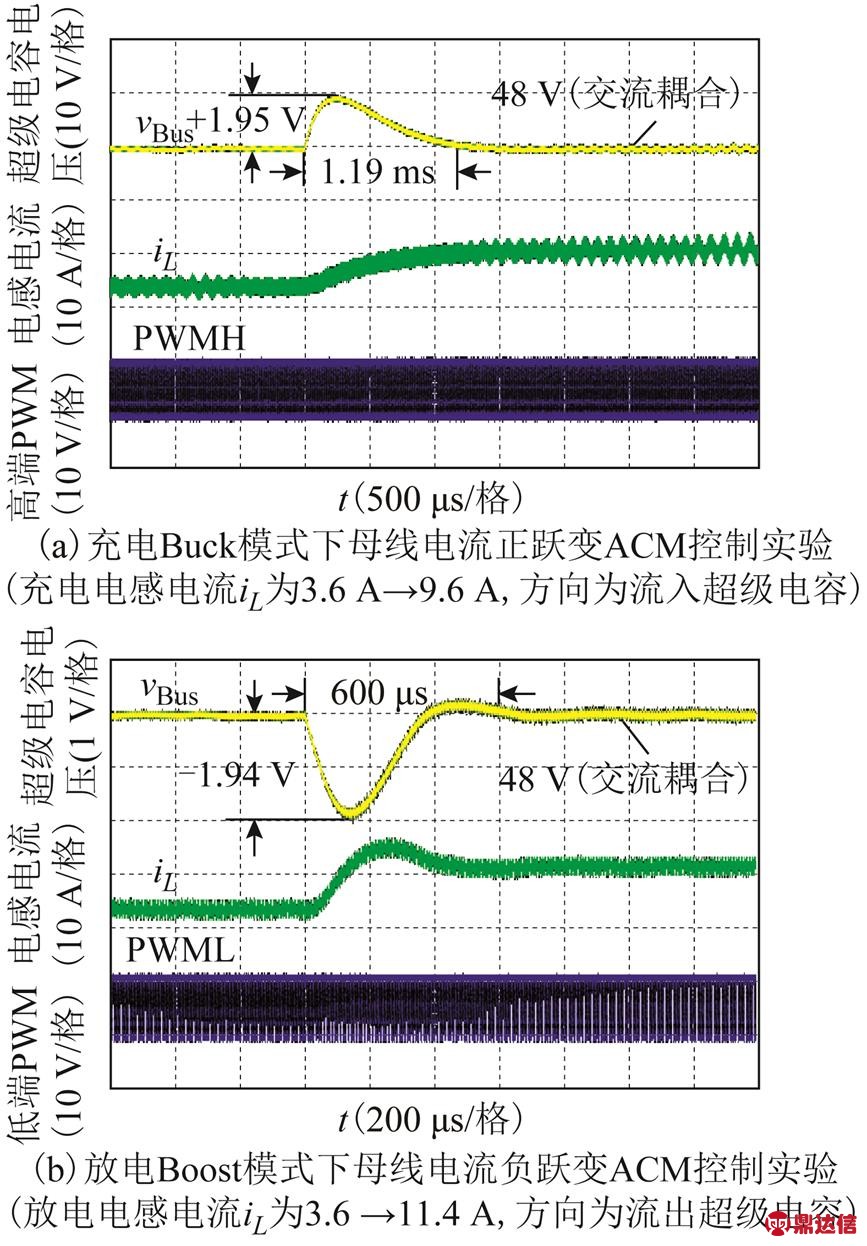
图16 ACM控制的实验结果
Fig.16 Experimental results of ACM control
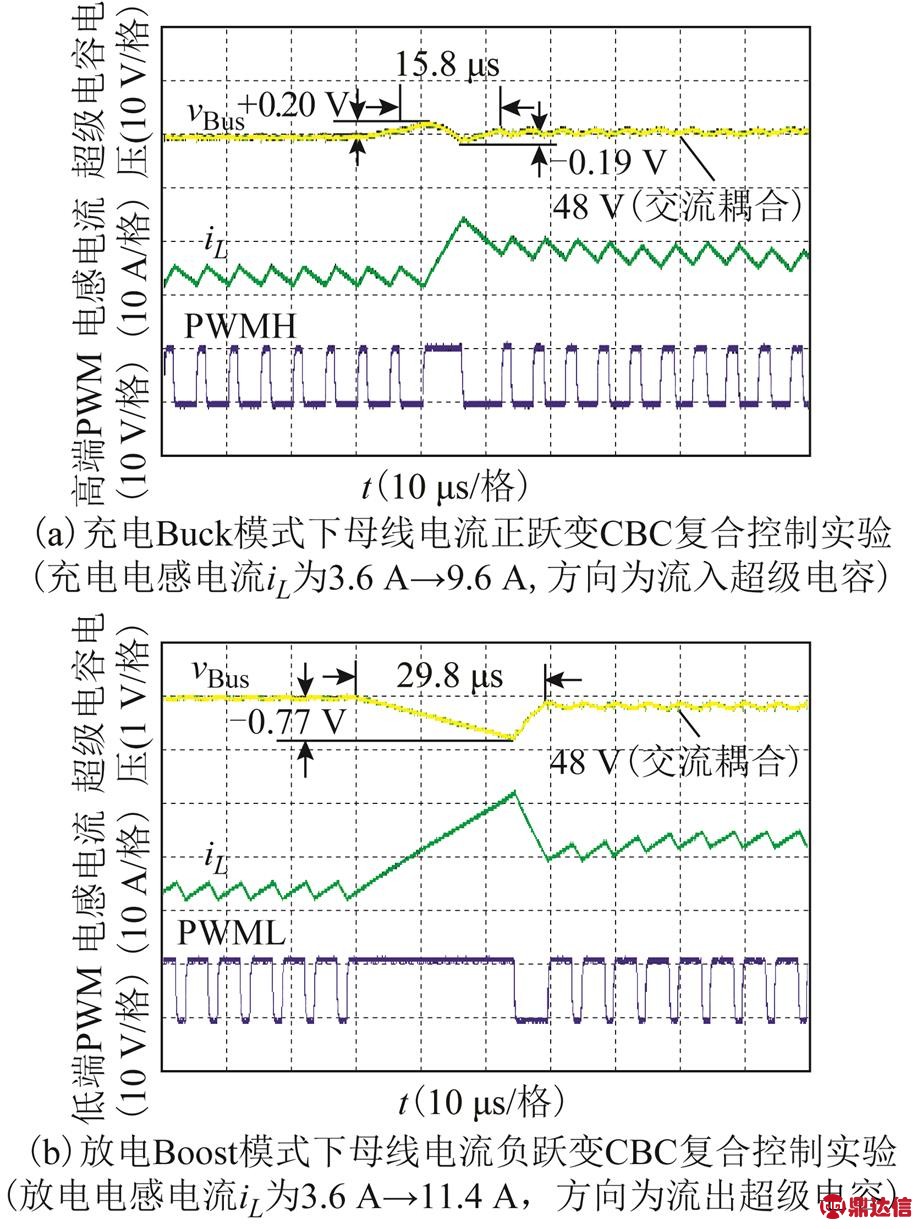
图17 CBC复合控制的实验结果
Fig.17 Experimental results of CBC hybrid control
综合上述实验结果表明:①母线负载(电流)发生大幅度阶跃时,所提CBC复合控制策略可显著提高超级电容接口双向变换器的调节时间,能够满足母线电压快恢复的要求;②将滞环限幅加入电流环可使控制器较好地实现超级电容过电压欠电压保护功能。
5 结论
本文针对直流微网瞬时大信号负载扰动的控制需求,基于电容充放电平衡的思想,提出了一种用于超级电容接口双向Buck-Boost变换器的CBC复合控制策略,并进行了仿真与实验验证,得到主要结论如下:
1)所提CBC复合控制策略能够有效实现负载大扰动下母线电压的快速恢复,并解决了模拟控制存在的不规则电流积分及多电压峰值点检测困难的问题。同时,CBC控制过程中开关管只动作两次,在一定程度上减小了开关损耗,且开关频率恒定。
2)通过适当选取电流参考方向,将两种工作模式下电流的面积积分简化为正向几何面积求解,仿真与实验验证了电流面积估算和新稳态电流值预测方法的有效性。将间接预测电容电流变化规律的思想进行扩展和优化,得出一般的节点电流替代法及具有相似对称的控制律,两种工作模式下采用统一的数字控制器。
3)在互补PWM输出控制的基础上,结合平均电流模式控制和滞环电流限幅环节实现接口变换器稳态的双端口稳定控制,能够在稳定母线电压的同时兼顾超级电容的过电压欠电压保护以及最大持续工作电流限幅。


