
摘 要 目的 基于微泵流体速度调节不准确、难以实现流量精确控制等问题,以无阀微泵为研究目标,设计了一种新型内置线弹性棒的无阀微泵结构。方法 利用线弹性棒的弯曲变形特性及Navier-Stokes方程组,使用有限元方法建立新型无阀微泵的多物理场耦合数值模型,通过参数扫描计算分析了在不同驱动振幅和驱动频率下对无阀式微泵输出净流量的影响。结果 在驱动频率相同的条件下,微泵输出净流量随着驱动振幅的增加而增加;当保持驱动振幅不变时,提升驱动频率对微泵输出性能的影响较弱。结论 该研究的计算仿真分析为新型无阀式微泵的结构设计提供数值参考并积累一定的经验。
关键词 无阀微泵;微流控芯片;有限单元法;数值仿真;流量控制;流体动力学
0 引言
微流控芯片结合了流体输运、试剂反应、物质分离和分析等功能于微小芯片上,具有体积小、流动流体可控、消耗试剂少、分析效率高、生产成本低等特点,并可运用在生物工程、化学分析、药物输送、血液输运、能源动力、航空航天和医学领域[1],具有广阔的应用前景。微泵作为微流控系统的核心器件,是微流体输运的动力源,代表了其领域的先进研究水平。自20世纪80年代以来,微泵广泛地运用于药物的输送、化学试剂的反应、DNA和蛋白质的分析等[2-3],取得了多项研究成果,有着巨大的市场发展潜力[4-5]。
微泵作为流体输运系统的动力源,是微流控芯片发展的重要标志。微泵根据有无阀片分为有阀型、无阀型两类。有阀型微泵的工作原理简单,机械式零件工艺成熟,但其加工成本高,阀片开关所带来的机械摩擦对微泵造成一定程度的损伤和疲劳,并且流体输运过程中阻塞现象明显,微泵效率低[6-9]。与有阀型微泵相比,无阀式微泵具有结构简单、无器件间的物理摩擦、对高频的输入响应特性好、易于大批量加工和生产、便于集成化和芯片化等特点[10-13]。
以往对于无阀型微泵的研究和改进中主要集中在收缩-扩张管类型微泵的特征分析上,流体自身和不同通道结构的耦合作用并没有被很好地研究。同时,在生物医学等领域的实际应用中,微泵的效率和输出能力很难达到理想水平[9],因此微泵的输出效率仍是亟待解决的关键问题,如何将微泵集成化、芯片化作为进一步发展的突破口,提升微流控的应用水平成为目前本领域工作者的重要任务[14-15]。针对该需求,本文拟用线弹性棒的变形特性增加微流体输运效率,进一步提升无阀式微泵的输出性能。
1 无阀式微泵的设计及结构
基于微泵管道内线弹性棒的弯曲变形特性及输入流体的连续性和Navier-Stokes方程组,使用有限元方法建立了一种多物理场耦合的无阀式微泵模型,如图1所示。流体由AB面入口处进入微泵,随后流入S形主管道,并在线弹性棒的辅助下从边界EF处出口管流出,完成流体泵送。S形主管道的环状半径分别为r1=300 μm、r2=200 μm。水平线弹性棒与管道壁的连接点和下管道圆心的连线与竖直方向呈夹角β为45°,同样地,竖直线弹性棒也在与竖直方向夹角β为45°的位置,两根线弹性棒的长度为70 μm,并且线弹性棒材料的杨氏模量为3.6×105 Pa,泊松比为0.5,密度为970 kg/m3。
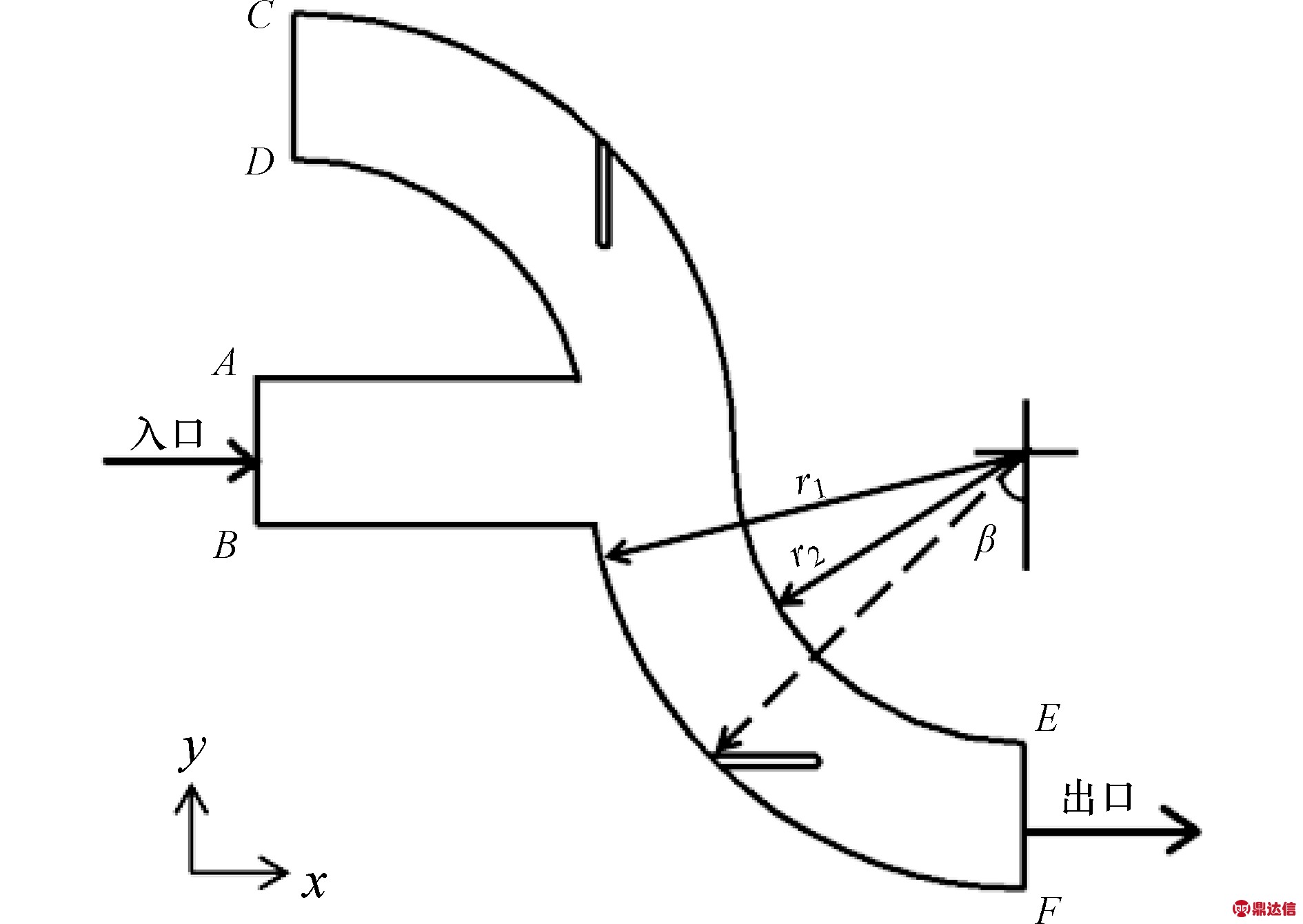
图1 无阀微泵平面结构
Figure 1 Planar structure of valveless micropump
此无阀微泵的工作原理是:在AB界面入口处输入速度随着正弦函数变化的周期性流体,使得两根线弹性棒在流体的阻碍作用下产生往复式弯曲变形,进而影响了流体流量。流体流动方向由左至右为正方向,当一个周期内EF界面与CD界面分别通过的正向流量之差为正值时,即在EF界面出口处获得正向的净流量,完成流体泵送。
在一个泵送周期中,当AB界面入口处输入速度为正值时,流体由左至右流入S形主管道,随后分为两股分别流向EF界面处与CD界面处,此时竖直方向的线弹性棒受到y方向和-x方向上流体的阻碍作用,产生向着CD界面方向的弯曲形变,竖直线弹性棒为了恢复原先的形态,棒的弹性力会逐渐增加直至与流体阻力平衡,这种形变使得竖直线弹性棒在流道径向的投影长度增加,阻碍流体继续流向CD界面处;同样地,在主管道中位于下方的水平线弹性棒受到x方向和-y方向上流体的阻力作用,产生向着-y方向的弯曲形变,这种形变使水平线弹性棒在流道径向的投影长度减少,从而使主管道中的流体能顺利地从EF界面处泵送出去;这样,大部分流体流出了下主管道,仅有少部分流体从上主管道流出。
当AB界面入口处输入速度为负值时,主管道EF界面处与CD界面处的两股流体反向流动,由进口管汇合后流向AB界面入口处,此时靠近EF界面的水平线弹性棒受到y方向和-x方向的流体阻力,产生远离EF界面方向的弯曲形变,同时,线弹性棒为了恢复原先的水平形态,棒的弹性力会逐渐增加直至与流体阻力平衡,发生的弯曲形变使得水平线弹性棒在径向的投影长度增加,在一定程度上阻碍了流体从EF界面处流回进口管;在主管道上方的竖直线弹性棒由于受到x方向和-y方向上流体的推动作用,产生向着x方向的弯曲形变,这种形变驱使竖直线弹性棒更加贴近管道壁,使得CD界面处的流体能顺利流回进口管中;这样,大部分流体从上主管道流回了进口管中,仅有少部分流体从下主管道流回进口管。
正是因为竖直线弹性棒和水平线弹性棒受到流体阻力后发生不同程度的弯曲变形,进一步影响了管内流体的流量分布,使得在一个AB界面速度变化周期内,EF界面与CD界面分别通过的流量之差为正值时,即为EF界面出口处的净流量,其特征是泵送流量呈现周期性增加。
2 无阀式微泵的理论建模和分析
2.1 Navier-Stokes方程组
由于在此微泵中的流体雷诺数(Re=16)较低,这时在Navier-Stokes方程中的惯性项可以忽略,所以此环境下流体流场可以用Stokes方程和流体的连续性方程来描述,表示为
ρf![]() =
= ·[-pI+μ(u+
·[-pI+μ(u+![]()
和
![]()
![]()
式中:ρf=103 kg/m3,为流体的密度;μ为流体的黏度;u为流体流速;p为流体压力;I为一阶张量;uT为u的转置矩阵。
相对大气压,出口CD和EF的边界条件为

微泵的管道壁面设置为无滑移边界,即

2.2 弹性力学方程
两根线弹性棒的控制方程描述为
ρsolid![]() -
-![]()
式中:ρsolid是线弹性棒的密度;δ(usolid)是加载在固相的柯西应力。
在一个微泵周期内,由入口AB界面的流速、出口CD和EF界面的流速随着时间而变化,取由左至右的方向为正,对出口CD界面积分得到该界面上的流速,表示为

式中:UoutL为CD界面上的流速;ufluid为x方向上速度分量;W为所选取的区域宽度。
同理,出口EF界面上流速表示为
整个微泵的净流体流速为

3 数值计算结果与分析
3.1 有限元模型的建立
本研究采用的是开源有限元软件来分析研究无阀泵的流体特性。根据图1建立二维无阀微泵有限元模型,包含了进口管、S形主管道、竖直线弹性棒和水平线弹性棒。
模型分析采用三角形网格来划分整个微泵,设置自动重划网格以适应线弹性棒弯曲变形时移动网格的变形,来确保模型计算过程中的数据精度;微泵的管壁均设置为无滑移边界条件,同时,将随时间变化的正弦驱动作为输入施加至入口边界AB上,随后流体被送至主管道内。
3.2 仿真结果及分析
本研究从两个方面提升了微泵的泵送性能,一方面选择外部周期性输入流体的驱动方式,避开了传统“收缩-扩张”微泵带来的难以自吸问题,另一方面合理地运用线弹性棒在流体阻力下产生的变形从而影响了管道内流量分布。由于选择随正弦函数变化的外部驱动输入,其速度振幅决定了泵内流体所能达到的最大速度,输入频率则决定了单位时间内完成的泵送周期数,使用参数扫描方法进一步研究入口处流体的速度的振幅、输入频率对周期内的净泵送流量所产生的影响。
3.2.1 入口速度幅值对流量泵送的影响
本研究基于参数扫描建立三种不同入口速度下的微泵计算模型,它们具有相同的几何结构,其他边界条件设置为固定边界条件;选择水为此微泵中的工作流体;入口边界AB处的驱动速度分别设置为
U01=6Us(1-s)sin(2πt)
U02=12Us(1-s)sin(2πt)
U03=6Us(1-s)sin(πt)
式中:s为局部变量;U为流体入口平均速度,U=0.16 m/s。
在进行数值计算后,得到了图2~图4的流体流速和微泵净泵送流量曲线的对比。
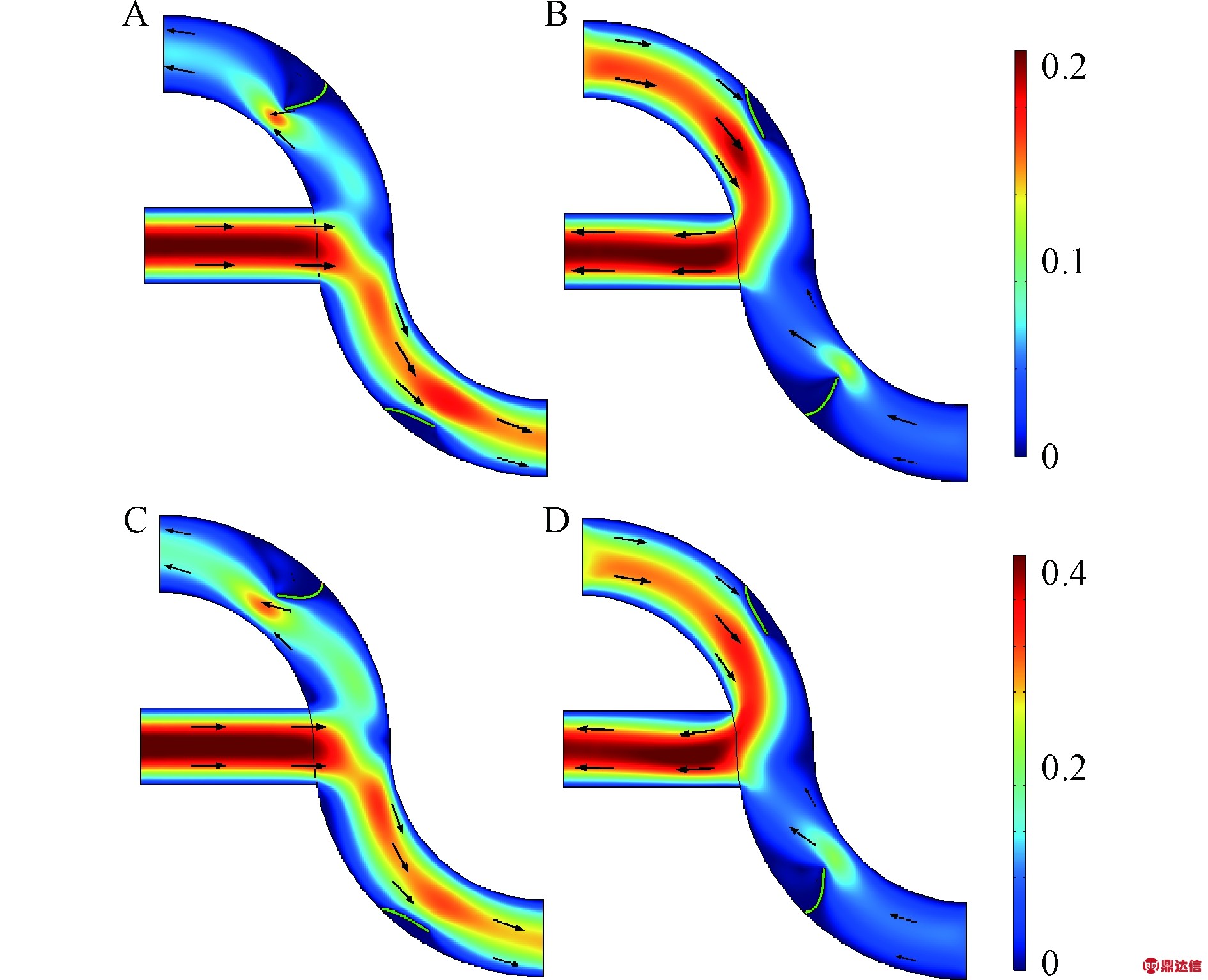
图2展示了在t=0.24 s、t=0.76 s下初始入口速度分别为U01和U02的泵内流体速度。图2A和图2C中,边界入口速度在t=0.24 s左右达到正向最大值,从图中可以看出,图2C中流体流速(0.4 m/s)是图2A中流体流速(0.2m/s)的两倍,且线弹性棒的弯曲程度更大,即在一定的输入速度频率下,速度振幅越大,流体对线弹性棒产生的推动力作用越大,从而加强了线弹性棒的形变,使得竖直方向的线弹性棒向着CD界面方向发生更大的弯曲变形,进一步阻碍了流体从上主管道流出;而水平方向的线弹性棒受到流体推力使之产生向着-y方向的弯曲形变,使流体能够顺利流出;图2B和图2D中,边界入口速度在t=0.76 s左右达到反向最大值,图2D中流体流速(0.4 m/s)是图2B中流体流速(0.2 m/s)的两倍,在流体速度为负的半个周期内,主管道中水平的线弹性棒的弯曲变形阻碍流体的回流,而竖直方向的线弹性棒产生贴近管道壁的弯曲变形,使流体顺利流回进口管。这样在一个泵送周期内,正向泵送流量大于反向回流流量,即完成净的泵送流量。仿真结果得出,在驱动频率固定为2π时,净泵送流量随着驱动幅值的增加而增加,即微泵的即时输出性能与所施加的驱动速度幅值呈正比例关系。
图2 不同时间下入口边界速度分别为U01和U02的泵内流速
Figure 2 Fluid flow velocity at U01 and U02 under different time in valveless micropump
3.2.2 输入频率对流量泵送的影响
图3展示了不同输入频率下入口边界速度分别为U01和U03的泵内流速。所选择的两种入口驱动速度分别为U01=6Us(1-s)sin(2πt)和U03=6Us(1-s)sin(πt) ,入口速度幅值相同,频率分别为2π和π,图3A、图3B为驱动速度为U01在t=0.24 s和t=0.74 s下的泵内流速,图3C、图3D为驱动速度为U02在t=0.74 s和t=1.5 s下的泵内流速。由于改变了驱动频率,相应的泵送周期也会发生变化,当驱动频率减少到原先的一半时,图3A(0.24 s达到流体正向速度最大值)与图3C(0.74 s达到流体正向速度最大值)相比只需要更少的时间就能完成半个周期的流量泵送;同时图3B(0.76 s达到流体正向速度最大值)与图3D(1.5 s达到流体正向速度最大值)相比能在更短的时间内完成回流。两种驱动频率下所具有的最大流体速度是相同的,因此,在一定的振幅驱动下,完成一个泵送周期的时间随着驱动频率的增加而显著减少。
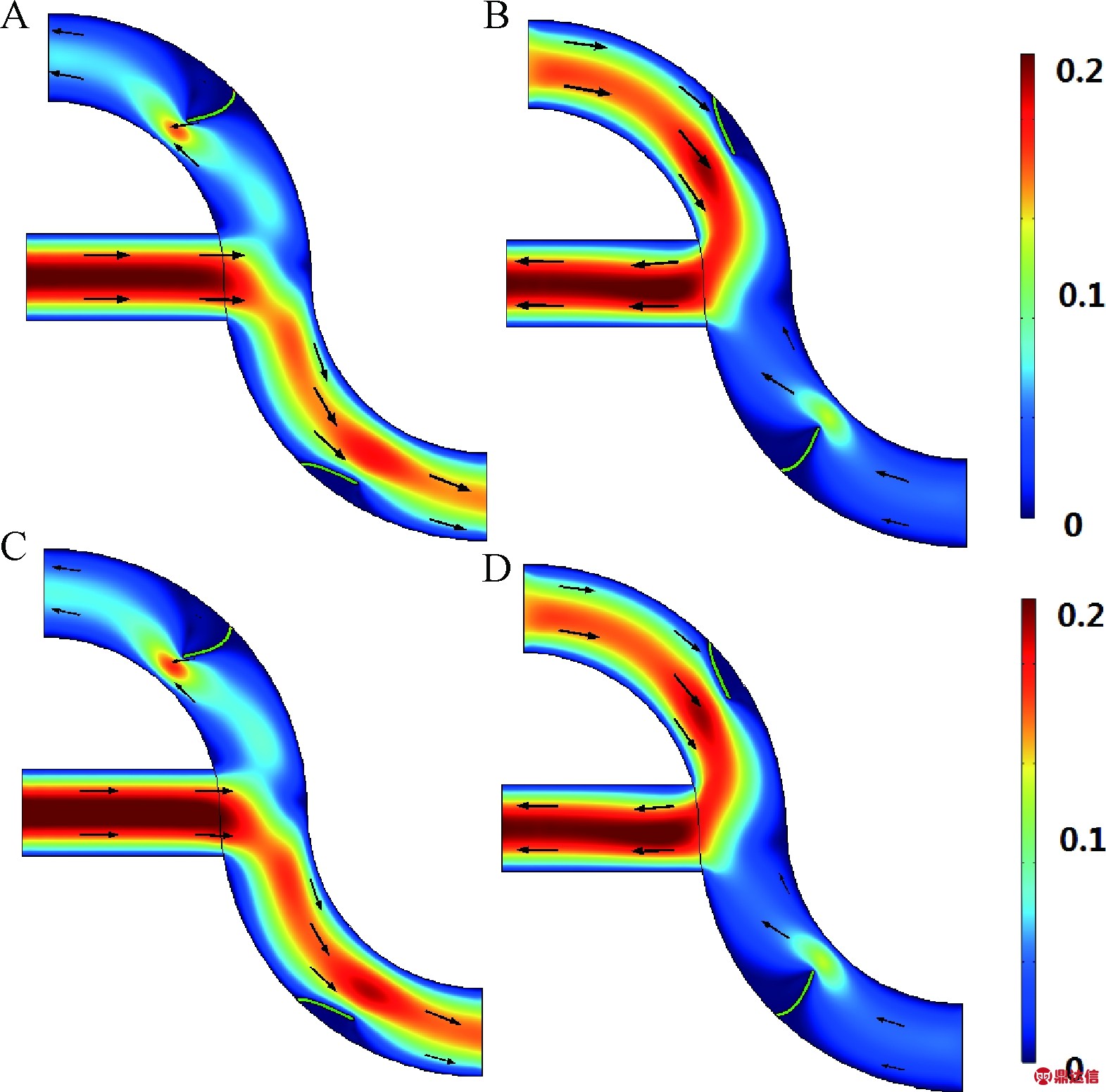
图3 不同时间下入口边界速度分别为U01和U03的泵内流速
Figure 3 Fluid flow velocity at U01 and U03 under different time in valveless micropump
3.2.3 微泵泵送性能的比较
为了更加深入地了解微泵在不同入口速度幅值和不同输入频率下,一个泵送周期内流量的变化和微泵整体的泵送性能,进一步计算了出口处的净流量,并获得仿真结果,得到不同入口速度幅值和不同输入频率下的净泵送流量对比曲线,如图4所示。当控制驱动频率一定,驱动振幅变为原先的2倍时,如曲线U01和U02,微泵的净泵送流量也随之增大为原来的2倍,二者呈正比的线性关系,流量曲线的走势也相同,在一个泵送周期内阶梯状呈现上升变化,因此在固定的驱动频率下,增加驱动振幅会明显提升微泵的输出性能。但是驱动振幅也不是无限地增大,不可超出微泵的承受范围,应根据实际应用和经济条件来决定。
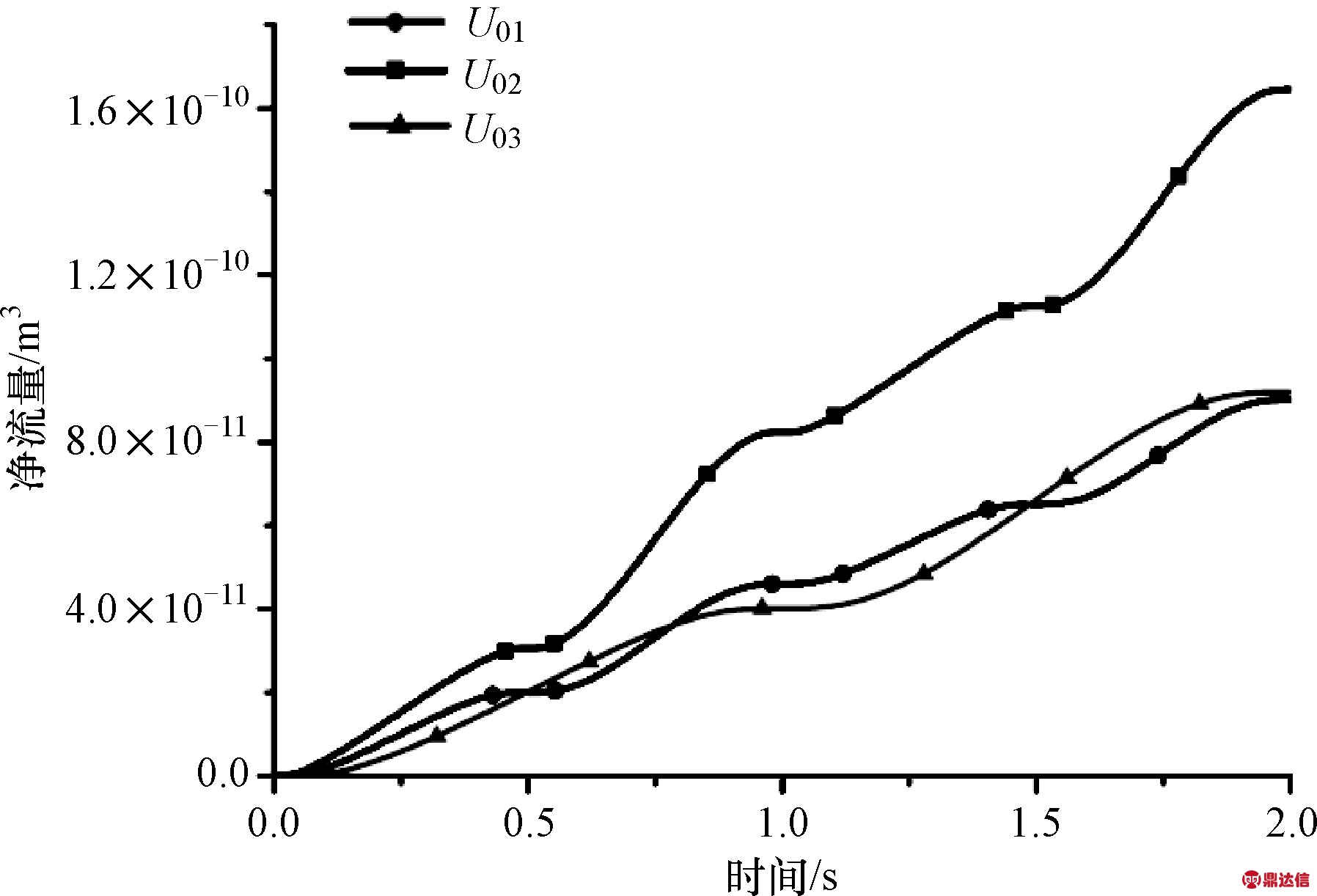
图4 入口速度分别为U01、U02和U03的净泵送流量曲线
Figure 4 Net volume pumped curve at U01、U02 and U03 in valveless micropump
当设置驱动振幅为一定值,使驱动频率变为原来的一半,即泵送周期变为原来的两倍,如曲线U01和U03。曲线U01的泵送周期为1 s,曲线U03的泵送周期为2 s,在2 s时刻下加载了两种驱动频率的微泵所泵送的净流量达到同值,且两只曲线走势大致相同,不同时刻下泵送流量微弱的差异,即改变驱动频率对整体净泵送流量具有微弱的影响,但在一定时间内,驱动频率高的微泵净流量泵送曲线所包含的泵送周期更多,同时微泵内流体回流时间更短;相比于曲线U03,曲线U01上升走势较快,高频下输出特性好,所以当驱动幅值一定时,增加驱动频率有助于提升微泵的整体性能,使之更加贴近正比例直线的变化趋势。
4 结论
基于线弹性棒的弯曲变形特征建立数值模型,通过对无阀微泵的入口驱动输入的参数分析与出口净流量的数值计算,考察了入口处驱动速度的输入幅值与驱动频率对微泵流量的影响关系,得出以下结论。
(1) 在驱动频率固定2π时,增加入口处驱动振幅,可以提升无阀式微泵的净泵送流量,从而有效提高微泵整体输出流量。
(2) 在数值计算时间2 s内,驱动频率高的微泵净流量泵送曲线所包含的泵送周期更多,说明微泵内流体的回流时间更短,正向泵送状态下单位时间泵送流量更快,即在一定的驱动振幅下,增加驱动频率,可以显著地减少泵送周期,加强微泵的稳定性。但在2 s时,不同输入驱动频率的微泵达到了相同的净泵送流量大小,从结果可以看出,改变驱动频率对整体净泵送流量具有微弱的影响。
(3) 采用设计的内含线弹性棒的无阀式微泵结构,有效地避开了传统式“收缩-扩张”类型微泵所带来的自吸问题,合理利用外部驱动输入来实现高效率的流体输送,结构简单实用性较好,微泵整体输出性能稳定,抗干扰能力强,并可通过改变入口处驱动的幅值与频率来实现对输送流体的精确流量控制,有效地减少微泵体积,提升系统的集成度,对后续研究起到了一定的指导意义。


