
摘 要:为解决球形内检测器——智能球在埋地输油管道内工作时示踪定位困难的问题,针对智能球自身局限性,提出基于极低频电磁原理的智能球示踪定位方法.首先分析智能球在管道内运动规律,建立智能球示踪模型,在此基础上推导出电磁信号发射机产生磁场的解析表达式.然后根据实际应用分析影响磁场分布规律的因素,并根据磁场分布的特征,提出智能球示踪定位方法.最后搭建测试系统,在模拟管道和实际管道上进行实验验证了智能球示踪方法可行性.在埋深1 m,管径219 mm,壁厚5.6 mm的长距离输油管线上,智能球示踪方法可以实现示踪定位功能.
关键词:智能球; 示踪定位; 运动特征; 极低频; 埋地管道
管道内检测器的示踪定位是指在管道外部通过某种技术确定内检测器在管道内部的位置[1].示踪定位系统能够记录下内检测器通过标记点的时间和地理坐标,辅助实现对泄漏位置的精确定位.当出现内检测器在管道内卡堵情况时,也需要借助该系统迅速准确地找到卡堵位置,组织抢修工作[2].
传统管道内检测器外观呈圆柱状,运行时紧贴管壁,靠前后压差前进,针对这种内检测器的示踪定位方法主要有以下几种:①基于永磁原理方法,内检测器携带永磁体,通过检测永磁体穿透管壁后的漏磁信号,确定内检测器通过性[3-4];②基于声学原理方法,利用声阵列地面标记器接收内检测器运行时与管壁、焊缝产生的摩擦、碰撞声,来判断内检测器通过时间[5-6];③基于极低频电磁原理方法,在内检测器内部安装电磁信号发射机,产生30 Hz以内的极低频电磁信号,利用管外接收装置检测电磁信号来判断内检测器的位置 [7-10].
本课题组研制了一款球形管道内检测器——智能球[11-12],其外径小于管道内径,可在管内油品推动下自由滚动,沿途记录各种信号用于离线识别和定位微小泄漏.智能球内部空间有限、需要检测管道焊缝磁信号、与管壁摩擦声音小,故永磁和声学原理的示踪定位方法难以应用到智能球系统中,于是笔者着重研究基于极低频电磁原理的智能球示踪定位方法.
由于传统的内检测器运行时始终与管道同轴,其携带的极低频发射器相对于管道不发生翻转,穿透到管道外的电磁信号分布规则、稳定,而智能球在管道内快速旋转,传统的理论、方法能否应用于其示踪定位是一个需要研究的问题.本文首先由智能球结构入手,分析其在管道内的运动特征,建立模型,从理论上推导出智能球运动过程中电磁信号发射机的磁场分布规律.然后着重分析了影响关键分量——轴线方向上的磁场分量Bx分布的因素,根据Bx曲线的特征提出智能球示踪定位方法.最后通过实验验证智能球示踪定位理论和示踪定位方法的可行性.
1 智能球示踪定位模型
1.1 智能球管道内运动特征分析
课题组针对20.32 cm(8 in)管道研制了一款智能球样机,其整体结构示意如图1所示,整个检测系统主要包括:声学传感器、信号调理模块、数据采集模块、系统控制模块、接口模块、电源模块、惯导模块和电磁信号发射模块.
![]()
转动惯量是一个物体对于其旋转运动的惯性,转动惯量在旋转动力学中的角色相当于线性动力学中的质量,转动惯量越大越不容易转动,转动惯量越小越容易转动.对应图1中的坐标系,该智能球绕X、Y、Z轴的转动惯量分别为20 695 kg·mm2、9 707 kg·mm2、19 493 kg·mm2,围绕Y轴的转动惯量最小且约为其他两轴的1/2,因此可以推断,在管道内流体推动作用下,智能球更易绕Y轴转动,此时电磁信号发射机在竖直平面内旋转.在后面分析智能球滚动情况下,发射机产生的磁场特点时,可将问题简化为发射机在竖直平面内旋转的运动模型.
1.2 智能球示踪定位模型推导
电磁信号发射机天线的结构为圆柱线圈骨架,外层包有多层漆包线,骨架中心为磁芯,磁芯材料一般为高磁导率的铁氧体或硅钢片.发射天线到接收模块的距离远大于发射天线尺寸,为方便研究可以把发射天线等效成一个密致螺线管[13].密致螺线管等效半径为R,长度为h.线圈中流过的电流为
i(t)=I0cos(ωt)
(1)
式中:ω为交变电流角频率;I0为交变电流的有效值.研究单匝线圈在空间中磁场分布规律,叠加即可得到整个密致螺线管在空间中磁场分布情况.单匝线圈在电流激励下的磁场分布情况,可以等效为磁偶极子模型,如图2所示,M为空间中任意一点.

![]()
单匝线圈磁矩可以表示为
pm=i(t)Sn
(2)
式中: S为线圈的横截面积,S=πR2;n为磁矩方向,由电流方向决定,满足右手定则[14].一个螺线管的磁矩是其每个单匝线圈的磁矩的矢量和[15],故整个螺线管的磁矩可表示为
Pm=Npm=NπR2I0cos(ωt)n
(3)
式中N为螺线管线圈的总匝数.根据以上推导,螺线管在空间中的磁场分布如下[16-17]:

(4)
式中: μo为真空磁导率;r为空间中任意点到螺线管中心的向量.
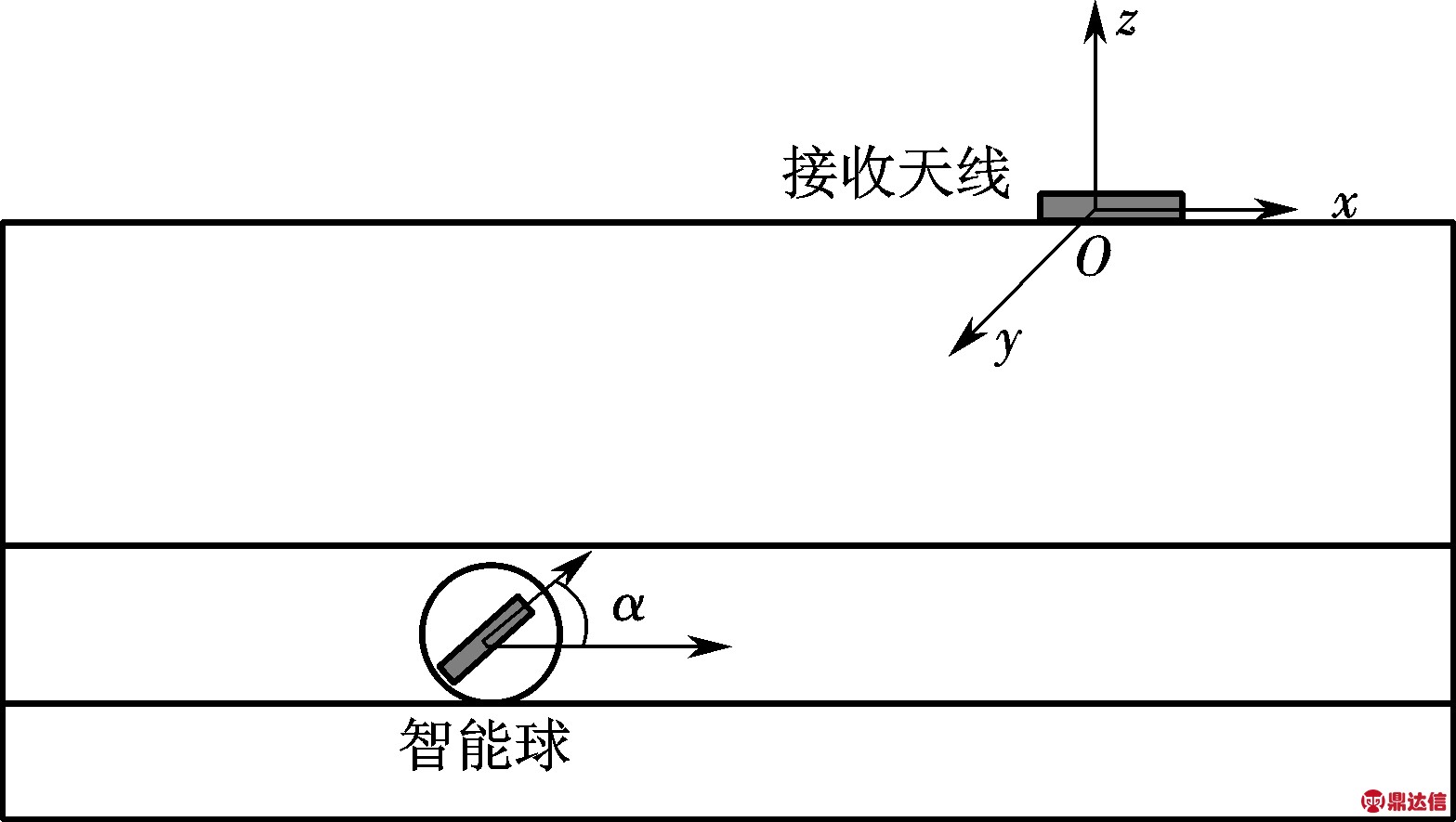
结合智能球的实际应用,建立智能球滚动模型如图3所示.在竖直平面内,设发射机天线轴线方向与管道轴线夹角为α,构建管道直角坐标系,以接收天线所在位置为原点O,管道轴线方向为x轴,水平方向为y轴,竖直方向为z轴,建立空间直角坐标系.
![]()
智能球运动过程中,需要考虑夹角α的变化,此时磁矩可表示为Pm=Pm(cos α,0,sin α) .设发射机天线的空间坐标为(-x,-y,-z),接收模块空间坐标为(0,0,0),从接收模块到发射机天线的空间向量为r=(x,y,z).
实际应用中,跟踪点一般设在管道里程桩处,此处的管道位置、走向是已知的,而接收天线都会放置在管道的正上方,可保证接收天线与发射机天线都在O-xy平面内,故可以设发射机天线坐标y=0,结合式(4)可得到真空中智能球滚动时,电磁信号发射天线的磁场分布情况用分量形式表示为

(5)
By=0
(6)

(7)
根据前面的介绍,智能球滚动过程中,发射机天线在竖直平面内旋转,于是可以推导出α与智能球滚动距离Δx之间的关系为
(8)
式中:αo为初始角度;D为智能球的外径.
以上分析是假设在真空条件下进行的,实际应用时管道、土壤、发射天线线圈磁芯等因素都会对信号的强度产生影响.其中,管道材质、壁厚是使电磁信号衰减最重要的因素,其衰减因子可以用一个指数形式来描述[17];土壤的电性参数对电磁信号衰减产生影响较小[18],可以用一个常数衰减因子表示;线圈磁芯的影响使空间远场电磁场的强度增强,而不改变电磁场的分布规律 [19].综上分析,可以近似地认为以上因素仅引起电磁信号强弱的变化,而不影响其空间分布情况.
2 智能球示踪定位模型特征分析
在实际应用时,接收天线总与管道方向平行,这里仅研究管道轴线方向上磁场分量Bx随x变化的分布规律.由式(5)可知,磁感应强度Bx分布与N、R、I0、x、z、α因素有关,其中x表示智能球到接收天线的水平距离,z表示接收天线到管道的距离,即埋地埋深.课题组自行研制的电磁发射机天线长度为70 mm,半径为20 mm,线圈匝数为4 500匝,由于智能球内部空间有限,结构复杂,发射机天线参数改变困难,故本文仅研究I0、z、αo因素变化对Bx的影响.
2.1 供电电压对Bx的影响
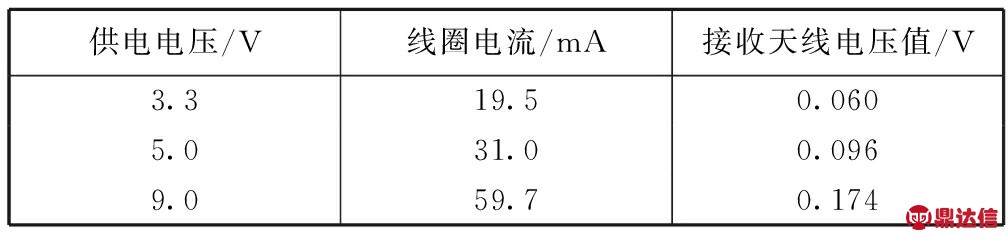
发射机天线供电电压U与线圈产生的磁场强度有关,研究两者之间的关系,可以利用接收天线将磁场强度转换成对应电压值,用接收天线电压值表示磁场强度,在接收天线与发射机距离为1.0 m情况下,保持接收天线与发射机平行放置,即αo=0°、z=1.0 m的实验条件下,依次取U=3.3 V、5.0 V、9.0 V,实测线圈供电电压U与磁场的关系如表1所示.
表1 供电电压与磁场关系
Tab.1 Relationship between power supply voltage and magnetic field
从表1中可以看出随着供电电压的增加,线圈中的电流增大,发射的电磁场强度明显提高,但是功耗随之增加.为满足工程上工作时长的需求,取U=5.0 V最为合适.
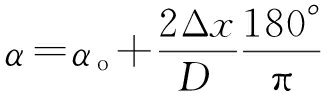
2.2 埋地埋深对Bx的影响
取αo=37°,依次取埋地埋深z=1.0 m、1.5 m、2.0 m,得到不同z值对磁感应强度Bx轮廓的影响,如图4所示.由图4可知,在x=0位置附近,随着z的增加,磁感应强度明显减小,但是整体曲线分布规律没有改变.
![]()
2.3 发射机天线夹角对Bx的影响
本文涉及的管道典型埋地埋深为1.0 m,故设z=1.0 m.智能球通过标记点时,夹角α不同会对磁场分布产生影响,由式(8)可知,α可以由αo代替.取αo为0°、60°,绘制Bx随x的变化曲线,如图5所示.由图5可知当αo取不同的数值时,Bx分布略有不同,主要是曲线形状和最大值不同.在z=1.0 m时,研究Bx曲线的峰值点随αo的变化情况,得到图6所示曲线.由图6可知,不同αo对应Bx曲线的峰值点位置和大小不同,峰值点偏离x=0的最大距离为0.112 0 m.
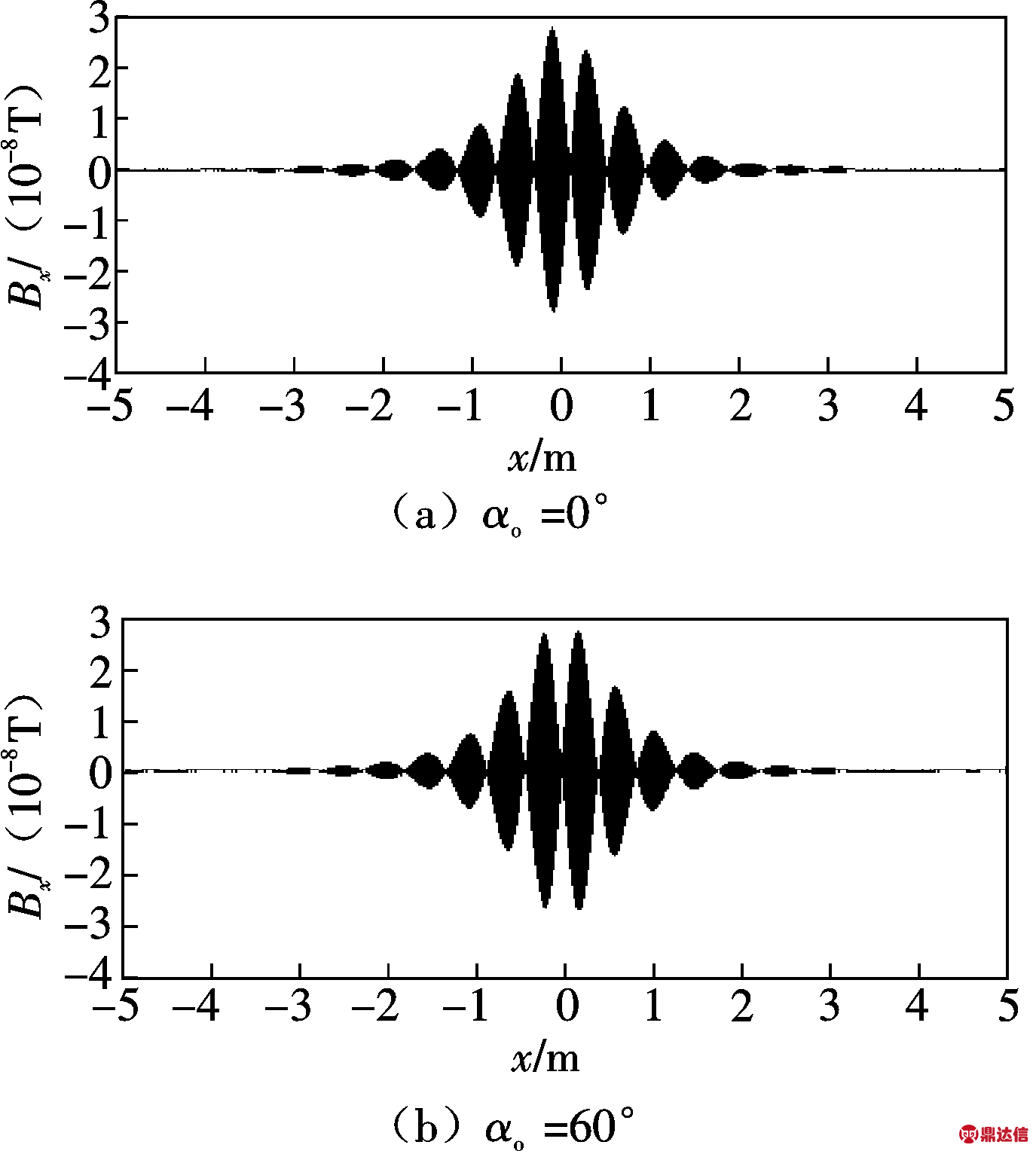
![]()
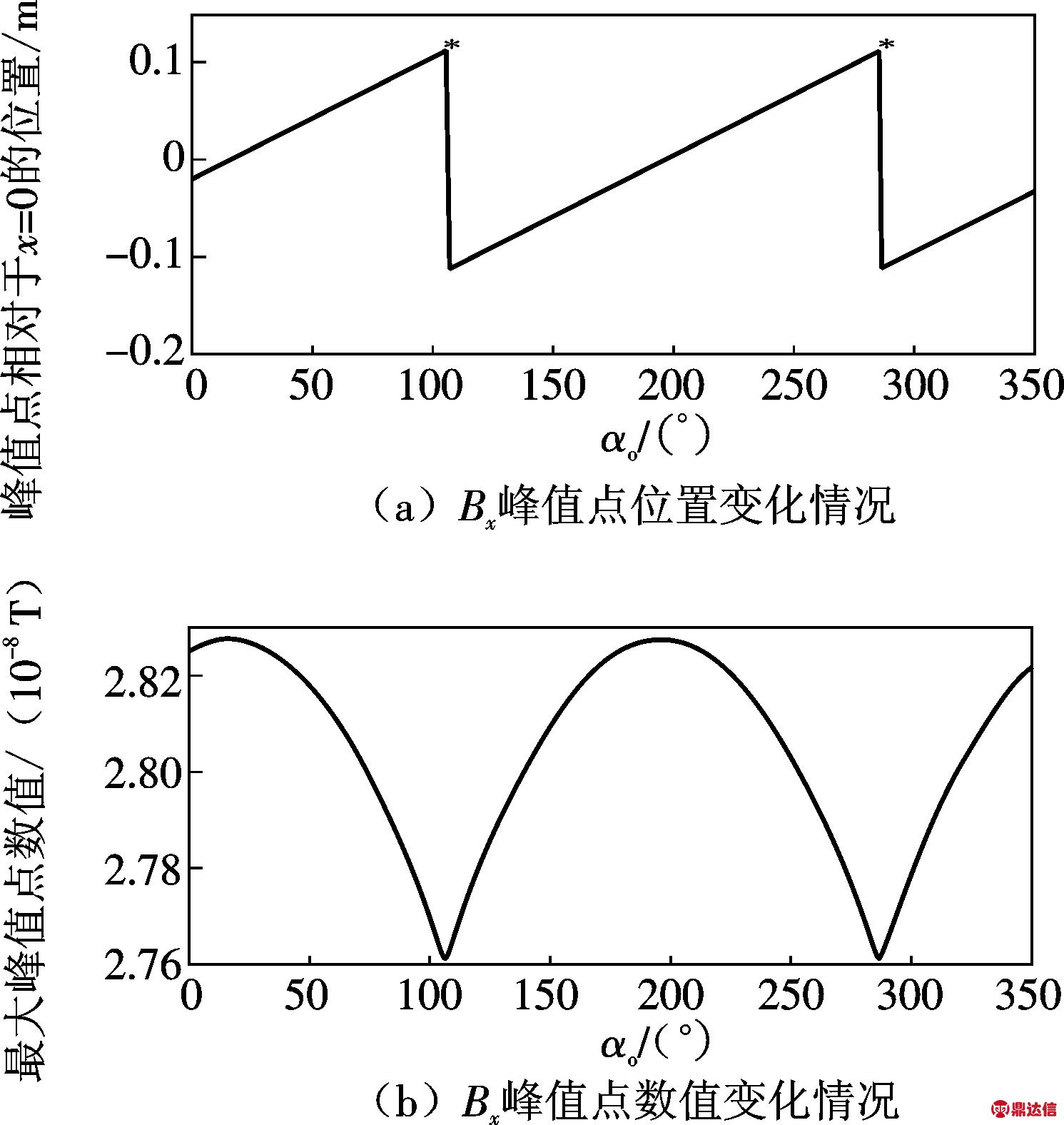
![]()
由以上分析可知,随着z增大,磁场度减小,但曲线形状保持不变;随着αo的变化,Bx曲线形状有所不同,主要表现在峰值点位置、大小发生变化.
在实际应用中,智能球在管道内滚动,经过每个标记点时,其夹角α不可能一致.针对这种情况,笔者总结了当αo不同时,Bx曲线所具有的共同特征如下:
(1)Bx曲线是被调幅的22 Hz正弦信号,其包络的频率等于球体滚动的频率;
(2)当智能球由远及近、再远离的过程中,Bx包络的幅值呈现由小到大再变小的趋势,而最大值点(绝对值)仅有一处;
(3)伴随智能球的滚动,Bx曲线在整个过程中都会出现波动,即出现一个接一个的峰值、谷值;
(4)若智能球匀速运动,则Bx包络的峰值之间的间距相等.
3 智能球示踪定位方法
根据前面得到的Bx曲线的特征,借助接收系统感应智能球通过时的磁感应强度变化,提出智能球在实际应用中示踪定位方法与步骤如下:
(1)根据当前噪声计算阈值,判断观察时间内接收到的电磁信号是否出现超过阈值的信号,是则进入下一步,否则重复该步骤;
(2)信号窄带滤波处理后,对超过阈值的信号进行峰值检测,再判断得到的信号是否符合Bx曲线包络线波动的特点,以3~5个波动信号为准,是则进入下一步,否则回到步骤(1),并认定该信号为干扰信号;
(3)在观测窗口内,检测提取的峰值信号点是否明显符合从小到大又变小的趋势,并且是否仅有一个极值点,是则进入下一步,否则回到步骤(1),并认定该信号为干扰信号;
(4)确定智能球通过该标记点,并以观察窗口内提取到的信号最大值点出现的时刻作为智能球通过该标记点的时间.
以包络最大峰值出现时刻作为智能球通过标记点时刻存在一定的偏差,由第2节分析可知,假设智能球的速度为1 m/s,最大偏差为0.11 s,可满足工程上的要求.
4 实 验
4.1 实验室条件下管道模拟实验
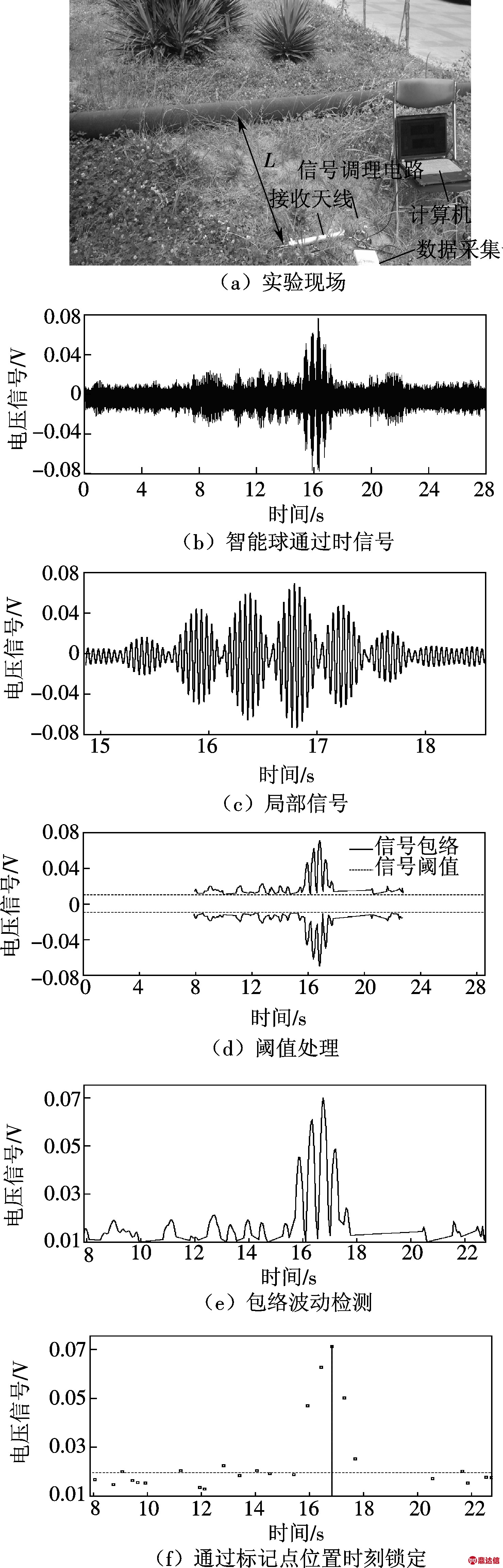
实验室条件下进行管道模拟实验,搭建的实验系统包括智能球、模拟管道和接收识别系统3部分.智能球的整体结构如图1所示,在其内部安装电磁信号发射机.模拟管道为一根长6 m、内径200 mm、壁厚 5 mm 的钢管,该钢管有一定坡度,智能球在钢管内可以实现自由滚动,如图7(a)所示.接收识别系统由接收天线、信号调理电路、数据采集卡和计算机组成.其中接收天线可以把电磁信号转变成电压信号,接收天线与管道平行放置,天线到管道的距离为L;调理电路对接收到的电压信号进行初步放大、滤波、再次放大处理;数据采集卡负责将调理后电压信号采集到计算机,在计算机上利用Labview软件编程实现对电磁信号的分析识别.在L=1.2 m条件下,进行智能球通过实验,图7(b)为智能球在管道内滚动过程中采集到的原始信号,图7(c)为智能球通过接收天线(标记点)时信号,图7(d)是对窗口内信号进行阈值处理的结果,图7(e)是对正半周期信号进行波动检测结果,图7(f)所示找到智能球通过标记点位置时刻为t=16.78 s.
从图7(c)中可以得到智能球通过时信号的特点:该信号为22 Hz正弦信号;当智能球由远及近再远离的过程中,信号轮廓上呈现由小到大再变小的趋势,且最大值点仅有一处;信号包络出现波动;包络峰值的间距近似相等.重复20次该实验都可以得到图7(b)、(c)所示的信号.本部分实验结果表明,智能球在管道内滚动过程中,接收天线上信号的特征与前面推导的Bx曲线特征一致,证明了前面推导的正确性.由图7(d)—图7(f)对信号处理结果可知,上节提出的方法能够有效识别智能球通过时的信号,并确定其时间.

4.2 广州埋地管道环境下测试实验
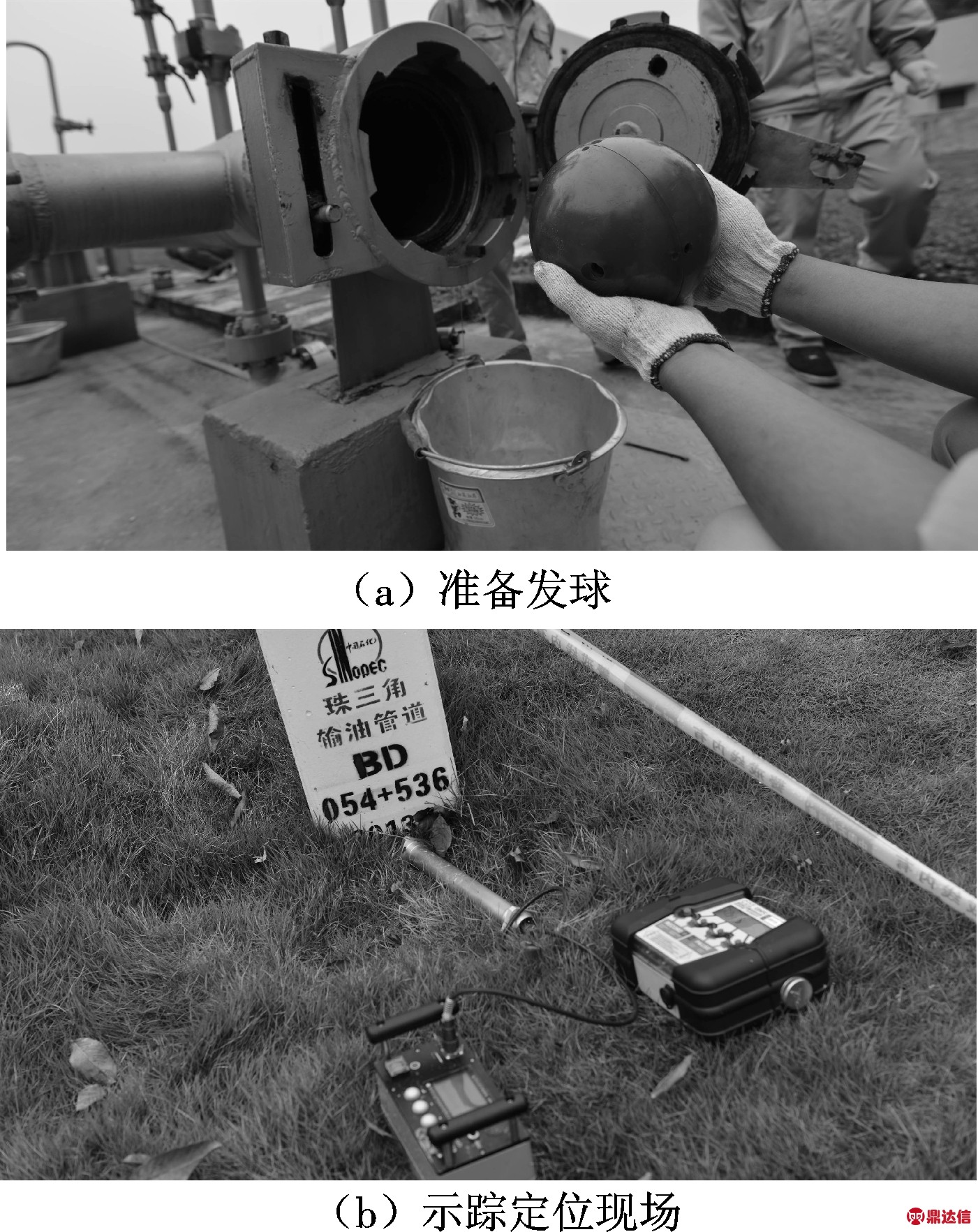
2015年3月中下旬,课题组利用智能球样机在中石化华南销售公司所属的珠三角成品油管道中山到斗门段进行了智能球微小泄漏检测与跟踪实验.实验管道长度为77 km,管径219 mm,管道材质为52钢,壁厚5.6 mm,典型埋深1 m,输送介质为柴油.全程共设置40个跟踪点(间距约2 km/个).实验情况如图8所示,实验室研制的接收系统尚不能在野外环境下使用,所以,在电磁信号接收端借助CDI公司的地面标记盒和一款国内传统的电磁信号接收机.地面标记盒接收距离短,不能显示波形;国产接收机天线外置,接收距离远,可以实时显示接收到的信号波形,但不能自动识别智能球通过信号.为了确认智能球通过标记点,工作人员需要实时观察国产接收机接收到的信号波形,结合本文提出的智能球通过时电磁信号特征,判断智能球是否通过标记点并记录时间.
图8(a)是工作人员为发球做准备工作;图8(b)是对智能球进行了全程跟踪过程的现场.全程的40个跟踪点中,34处成功追踪到智能球;6处未追踪到智能球的跟踪点主要分布在穿越河流、鱼塘等管道埋深较大的地点及高速路边等干扰严重地点.
此次输油管道实验智能球通过时接收到的信号与理论推导一致,证明了本文提出的智能球示踪定位方案的可行性以及示踪模型推导的正确性.
![]()
5 结 语
本文针对球形内检测器——智能球的局限性提出了一种基于极低频电磁原理的示踪模型,着重从理论上推导出智能球滚动过程中电磁发射机产生磁场的分布规律,以此为基础提出适用于智能球的示踪定位方法.搭建实验平台在实验室环境下进行模拟管道实验,验证了本文智能球示踪定位模型理论的正确性;实际埋地输油管线上的测试验证了智能球示踪定位方法的可行性.由于时间等因素限制,笔者设计的接收系统目前处于在实验室测试阶段,尚未满足实际工程需要.然而本文推导出的智能球通过标记点时电磁信号的特点,为设计球形内检测器的接收系统自动识别设计提供了理论基础.


