
摘 要:为了提高非均匀背景下的雷达目标恒虚警(CFAR)检测性能,该文基于变化指数CFAR(VI-CFAR)检测器,提出一种多策略CFAR(MS-CFAR)检测器。该检测器通过对参考窗中的杂波背景进行估计,自适应选择单元平均CFAR(CA-CFAR)、逼近CFAR(AC-CFAR)和交互式CFAR(S-CFAR)中的一种作为最优检测策略。仿真结果表明,MS-CFAR在继承了VI-CFAR优点的基础上,在均匀背景、杂波边缘和多目标干扰等背景下都表现出更好的检测性能,且具有更稳健的抗杂波边缘和抗多目标干扰性能。
关键词:雷达目标检测;多策略雷达目标恒虚警检测器;非均匀背景;自适应检测
恒虚警(Constant false alarm rate,CFAR)检测是雷达信号处理中的关键技术之一,即在一定杂波背景下,根据雷达系统给定的参数和要求,在保持恒定虚警概率的同时,实现目标自动检测,且使目标检测概率最大化。最为经典的CFAR技术当属单元平均CFAR(Cell average CFAR,CA-CFAR)[1],但当被检测单元处在非均匀杂波环境时,其性能会严重恶化[2-4]。单元平均选择大CFAR(GO-CFAR)[5]改善了CA-CFAR在杂波边缘背景下的检测性能;而单元平均选小CFAR(SO-CFAR)[6]及有序CFAR(OS-CFAR)[7,8]则有效改善了CA-CFAR在多目标时的检测性能。在综合了CA-CFAR、GO-CFAR 和SO-CFAR等CFAR检测器优点的基础上,文献[9]提出了变化指数CFAR(Variable index CFAR,VI-CFAR)多策略检测算法,它通过检测参考窗中的杂波背景,自适应选择CA-CFAR、GO-CFAR和SO-CFAR中的一种检测策略,以在均匀和非均匀杂波背景中都获得良好的检测性能。但当干扰目标同时出现在两侧参考窗中时,VI-CFAR的检测性能将恶化。文献[10]针对VI-CFAR这一问题进行了改进,它将交互式CFAR(S-CFAR)[11,12]和VI-CFAR相结合,提出了交互式变化指数CFAR(SVI-CFAR),但当只有一侧参考窗为非均匀时,因其采用半窗CA-CFAR而带来额外的检测损失;另外,当两侧参考滑窗为不同的均匀背景时,SVI-CFAR的漏警概率较高。本文针对杂波边缘、多目标干扰等非均匀杂波背景,在VI-CFAR的基础上,综合S-CFAR及逼近CFAR(AC-CFAR)[13]的优点,提出了一种多策略CFAR(MS-CFAR)检测器。仿真结果表明,该CFAR检测器在均匀及非均匀背景下都具有良好的检测性能和稳健的抗杂波边缘和抗多目标干扰的性能。
1 相关的CFAR检测器
1.1 VI-CFAR检测器
VI-CFAR检测器[9]是基于CA-CFAR、SO-CFAR、GO-CFAR的一种综合检测方法,它是通过计算前后参考窗A和B的均值比VMR及二阶统计量(即变化指数)VVI,来判断杂波背景和估算杂波功率,以自适应选择CA-CFAR、SO-CFAR、GO-CFAR中的一种检测算法。A、B参考窗的均值比VMR为

(1)
式中![]() B分别是A、B参考窗中杂波功率的算术平均值;xi为A(或B)参考窗中第i个参考单元的杂波功率。通过VMR与门限TMR的比较
B分别是A、B参考窗中杂波功率的算术平均值;xi为A(或B)参考窗中第i个参考单元的杂波功率。通过VMR与门限TMR的比较

(2)
可以确定A、B参考窗的均值是否相同。
参考窗的变化指数VVI定义为

(3)
式中:N为参考窗中参考单元的个数![]() 和
和![]() 2分别为参考窗杂波功率的均值和方差的估计值
2分别为参考窗杂波功率的均值和方差的估计值![]() 为参考窗中杂波功率的算术平均值,对应A、B参考窗分别取
为参考窗中杂波功率的算术平均值,对应A、B参考窗分别取![]() A和
A和![]() B。通过VVI与门限TVI的比较
B。通过VVI与门限TVI的比较

(4)
可以判别VVI是来自均匀杂波还是非均匀杂波。
根据前后参考窗的杂波是否均匀及均值是否相同,自适应选择CA-CFAR、SO-CFAR、GO-CFAR 3种检测算法中的一种来进行目标检测。
1.2 S-CFAR检测器
S-CFAR[11,12]检测器基于被检测单元信息选择合适的参考单元样本,以进行杂波背景的功率估计,其实质是在CA-CFAR和感知平均电平检测器CFAR(CMLD-CFAR)[14]间切换来进行杂波强度的估计。算法步骤如下:
(1)前后参考窗A、B中共N个参考单元被分成2个集合S0和S1
(5)
式中:xi为参考单元的幅度,xi∈A∪B,x为被检测单元幅度,α为调节因子,且α>0;
(2)设集合S0中参考单元的个数n0

(6)
式中:β0和β1为常量,NT为整数门限。当式(6)满足时,则被检测单元存在目标。
S-CFAR检测器在均匀背景下性能接近于CA-CFAR,在非均匀杂波背景下也具有较好的鲁棒性。
2 MS-CFAR检测器设计及参数选择
2.1 MS-CFAR检测器设计
当雷达工作于非均匀杂波且存在干扰目标的复杂背景环境时,采用某一种CFAR检测算法将难以达到性能要求。MS-CFAR检测器就是针对此类环境提出的,其原理框图如图1所示。
根据前后参考窗中背景是否均匀及均值是否相同,选择合适的CFAR检测策略,具体如表1所示。当背景杂波比较均匀时,CA-CFAR检测器具有最佳的检测性能。因此,当前后参考窗具有相同均值的均匀背景时,MS-CFAR将选择CA-CFAR检测算法,如表1中场景1。当检测单元处于杂波边缘时,前后参考窗为不同均值的均匀背景,如表1中的场景2,MS-CFAR将选择AC-CFAR检测策略。AC-CFAR检测算法是在CA-CFAR基础上改进而来,它从2个由均值法产生的参考窗均值局部估计中,选出一个与被检测单元采样更相近的估计值作为总的杂波功率水平估计,并与标称化因子T相乘,由此形成检测门限。其检测损失优于GO-CFAR,且具有很好的抗杂波边缘性能和抗多目标性能[13]。当参考窗因存在干扰而导致背景杂波呈非均匀特性,如表1中的场景3、场景4及场景5,MS-CFAR都将采用S-CFAR检测算法,以改善检测性能,降低检测损失。

图1 MS-CFAR检测器
表1 MS-CFAR检测器自适应算法选择策略

2.2 MS-CFAR检测器参数选择
MS-CFAR检测器采用与VI-CFAR相同的自适应选择策略,即根据不同场景而选择CA-CFAR、AC-CFAR或S-CFAR检测算法,其性能取决于N、CN、TMR、TVI、TAC及Ts等参数,其中TMR和TVI将直接影响MS-CFAR检测器最优策略的选取。
TMR和TVI参数选取应使MS-CFAR检测器对前后参考窗背景判断的错误概率最小。由式(2)和式(4)可知,当参考窗具有均匀的背景杂波时,MS-CFAR检测器对杂波是否均匀及均值是否相同出现误判的概率分别为Pf-VI和Pf-MR
Pf-VI=P[VVI>TVI|均匀背景]
(7)
Pf-MR=1-P[1/TMR≤VMR≤TMR|均匀背景]
(8)
由式(7)和式(8)可知,TMR和TVI越大,MS-CFAR检测器将均匀背景杂波判作非均匀杂波的错误概率越小,但将非均匀杂波背景判作均匀杂波背景的错误概率也越大,因此需要折衷选择TMR和TVI。一般TVI的取值要确保在均匀杂波背景中,VVI判断出错的概率Pf-VI与CFAR检测器所预期的虚警概率处于同一个量级;TMR则要确保VMR判断出错的概率Pf-MR不大于0.1。TMR和TVI的选取是比较困难的,实际应用中一般采用蒙特卡罗仿真方法获得。
在表1所示的场景1中,MS-CFAR将选择CA-CFAR作为最优检测策略,此时N的取值越大,MS-CFAR检测损失越小,同时也越有利于VVI的估计。但是N的增大也意味着运算量的增加。因此,N应折衷选取,一般取N≥24时就可以满足检测需求。而CN的取值为[7]

(9)
式中:Pfa为虚警概率。N和CN的选取方法可推广至表1中的其他所有场景。
TAC及Ts参数的选取,则可以分别参考文献[13]和文献[11],这里不再赘述。
3 设计仿真
采用蒙特卡罗仿真方法,仿真次数取106。检测器的参考窗长度N=24,参数TVI=4.67,TMR=2.19,虚警概率Pfa=10-6,S-CFAR检测策略中的α=0.4。分别在均匀杂波背景、多目标干扰及杂波边缘环境下对比仿真MS-CFAR检测器和SVI-CFAR、VI-CFAR、CA-CFAR及GO-CFAR的检测性能。
图2为均匀杂波背景下的CFAR检测器检测概率。从图2中可以看出,在均匀杂波背景下,MS-CFAR、SVI-CFAR及VI-CFAR检测器都将选择CA-CFAR检测策略,其目标检测性能相差无几,且略优于S-CFAR检测器的检测性能。
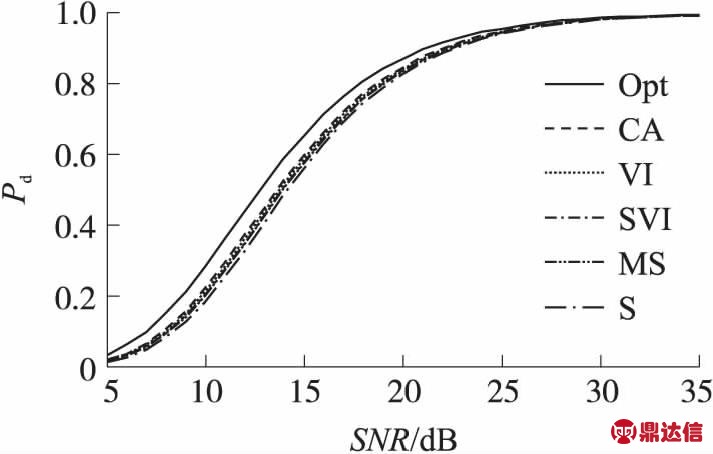
图2 均匀杂波背景下的检测概率
图3是前参考窗存在1个干扰目标时的CFAR检测器检测概率。从图3中可以看出,当前参考窗中存在1个干扰时,CA-CFAR和GO-CFAR的检测性能急剧下降;SVI-CFAR及VI-CFAR检测器选择后参考窗进行CA-CFAR检测,在信噪比较低时导致一定的检测损失;而MS-CFAR选择S-CFAR检测策略,其检测损失略优于前两者。当前参考窗中的干扰目标数增加到3时,如图4所示,由于SVI-CFAR选择GO-CFAR检测策略概率大大增加,从而导致其在较低信噪比时检测性能明显下降。图5所示是前后参考窗中同时存在3个干扰目标时的CFAR检测概率。从图5中可以看出,随着干扰目标个数的增加,各检测器的性能都出现不同程度的下降,检测损失增加。由于VI-CFAR检测器选择SO-CFAR检测策略,其性能下降最为严重;SVI-CFAR此时选择GO-CFAR或CA-CFAR的概率较高,而MS-CFAR将选择AC-CFAR或S-CFAR检测策略,所以MS-CFAR的性能要优于SVI-CFAR。

图3 前参考窗存在1个干扰时的检测概率

图4 前参考窗存在3个干扰时的检测概率

图5 前后参考窗均存在3个干扰时的检测概率
图6是虚警概率Pfa=10-3时杂波边缘所处不同位置对CFAR检测器虚警概率的影响仿真。从图6可以看出,MS-CFAR检测器具有很好的虚警控制能力。这主要是在杂波边缘场景中,VI-CFAR和SVI-CFAR将优先选择GO-CFAR策略,而MS-CFAR将选择具有更好的抗杂波边缘性能的AC-CFAR检测策略。
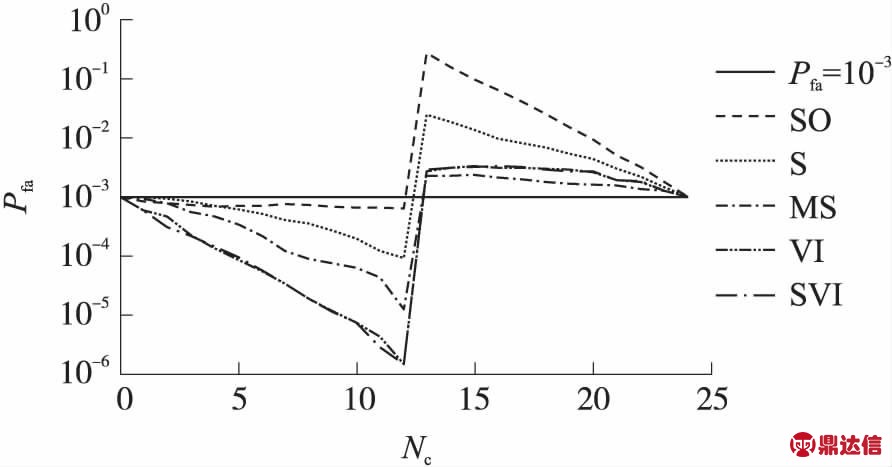
图6 不同杂波边缘位置的虚警概率
4 结束语
本文针对杂波边缘及多目标干扰等非均匀杂波背景中的雷达恒虚警检测,在VI-CFAR检测器的基础上,提出了一种多策略CFAR检测器。利用VI-CFAR中的杂波背景估计思想,合理设置估计阈值参数,对参考窗中的杂波背景进行估计判断,根据不同杂波背景场景,自适应选择CA-CFAR、AC-CFAR及S-CFAR 3种不同检测策略,充分发挥了3种CFAR检测算法各自的优点。蒙特卡罗仿真结果表明,MS-CFAR检测器相比VI-CFAR及SVI-CFAR检测器,在均匀背景、杂波边缘和多目标干扰等背景下具有更好的目标检测性能和更低的检测损失,其抗杂波边缘和抗多目标干扰的性能更为稳健。如何自适应设置杂波背景估计阈值参数,使MS-CFAR检测器能够适应更多的应用场景将是下一步的主要工作。


