
摘要 微电网孤岛运行时,恒压恒频控制模式的逆变型分布式电源(DG)支撑整个网络的电压与频率,其控制策略对微电网的故障穿越能力具有重要影响。该文采用虚拟阻抗法设计了U/f-DG的故障控制策略,分析了基于虚拟阻抗的逆变型DG控制原理,并推导出DG在正、负序网络下的等效模型,设计了故障情况下DG的限流算法。考虑到U/f-DG对并网点电压的支撑效果,提出了一种虚拟阻抗阻感比的设计方法,使不对称故障时并网点电压不平衡度最小化。并提出一种U/f-DG与从属DG的协调控制策略,使得微电网平稳度过故障暂态阶段。最后,Simulink算例仿真验证了所提故障控制策略的有效性。
关键词:逆变型分布式电源 恒压恒频控制 虚拟阻抗 故障控制策略
0 引言
近年来,微电网以其多样的供能方式及灵活的控制模式,成为国内外研究的热点[1,2]。微电网是由多种分布式电源(Distributed Generation, DG)、负荷组成的小型发电系统,既可以在孤岛模式下运行,也可以并入大电网运行。微电网中的分布式电源大多通过逆变器进行电能变换,由于逆变器中开关器件的热惯性较小,电网故障时DG输出电流受限[3],这使得DG在故障情况下的控制策略与正常情况不同。而微电网的故障穿越能力又与DG故障控制策略息息相关,因此,对DG的故障控制策略研究是非常必要的。
微电网正常运行时,逆变型DG采用的控制策略主要分为三种:恒功率控制(PQ control)、恒压恒频控制(U/f control)以及下垂控制。目前,针对PQ-DG低电压穿越控制策略的研究较为成熟[4-7]。随着微电网技术的发展,部分学者开始着手研究U/f控制和下垂控制的逆变型DG的故障控制策略。尤其是当孤岛微电网采用主从控制策略时,U/f-DG需要支撑整个网络的电压和频率[8],其在故障情况下的控制就显得更为重要,其控制目标主要包括逆变器输出电流的限制和并网点电压的支撑。
文献[9]提出直接限流法,对U/f-DG的电流控制环d、q轴参考信号设置阈值,但会导致DG在不对称故障时输出电流畸变。文献[10]提出对U/f-DG的电流控制环d、q轴参考信号进行等比例压缩,但会引起并网点相角不规则跳变,U/f-DG故障模型难以等效,不利于微电网的故障稳态分析。文献[11]提出将U/f-DG的电流参考信号切换至逆变器输出电流最大允许值,其弊端在于电压控制环不再起作用,不利于对并网点电压的调节。为解决上述问题,本文采用虚拟阻抗的方法,在故障时增大逆变器输出阻抗,使逆变器输出电流不越限,同时实现对并网点电压的控制。
虚拟阻抗法在微电网领域应用十分广泛,主要用于解决下垂控制的逆变型DG在低压线路中的功率耦合问题[12,13]、微网中多个下垂控制逆变型DG的均流问题[14]、提高逆变型DG分担不平衡负荷的能力[15]以及限制逆变器的输出电流[16,17]等。文献[16,17]基于虚拟阻抗法分别对下垂控制和U/f控制的DG进行故障控制策略的设计,虚拟阻抗值仅按逆变器出口处发生三相短路故障进行整定,缺乏不对称故障下的低电压穿越控制,且未探讨虚拟阻抗值的阻感比对并网点电压支撑效果产生的影响。
本文首先分析了基于虚拟阻抗的逆变型DG的控制原理,推导出DG在正、负序网络下的等效模型;根据直接限流法的弊端进行改进,提出一种基于虚拟阻抗的限流方法,实现逆变器在三相对称故障和两相不对称故障时输出电流不越限;探讨在限流条件下虚拟阻抗的阻感比对并网点电压产生的影响,提出虚拟阻抗阻感比的设计方法,使不对称故障时并网点电压不平衡度最小化,从而提高逆变器对微电网电压支撑的能力;提出U/f-DG与PQ-DG的协调控制策略,确保微电网平稳度过故障暂态,实现预期的控制目标;最后通过Simulink仿真验证了本文所提故障控制策略的有效性。
1 基于虚拟阻抗的U/f-DG控制原理及故障稳态模型
本文以逆变型DG作为研究对象,采用U/f控制模式。控制系统如图1所示,包括电容电压外环和电感电流内环。电压外环保证逆变型DG输出电压的稳定,电流内环可以抵御系统中的扰动,使逆变器具有良好的动态响应。采用前馈补偿法来抵消交叉耦合的电压、电流,减少微电网扰动的影响,提高系统的动态响应速度。图中u、i表示逆变器并网点电压和输出电流;uref、iref表示逆变器的基准电压和参考电流;uVI表示虚拟阻抗电压降;io表示入网电流;kPWM表示逆变器的基波等效放大倍数。
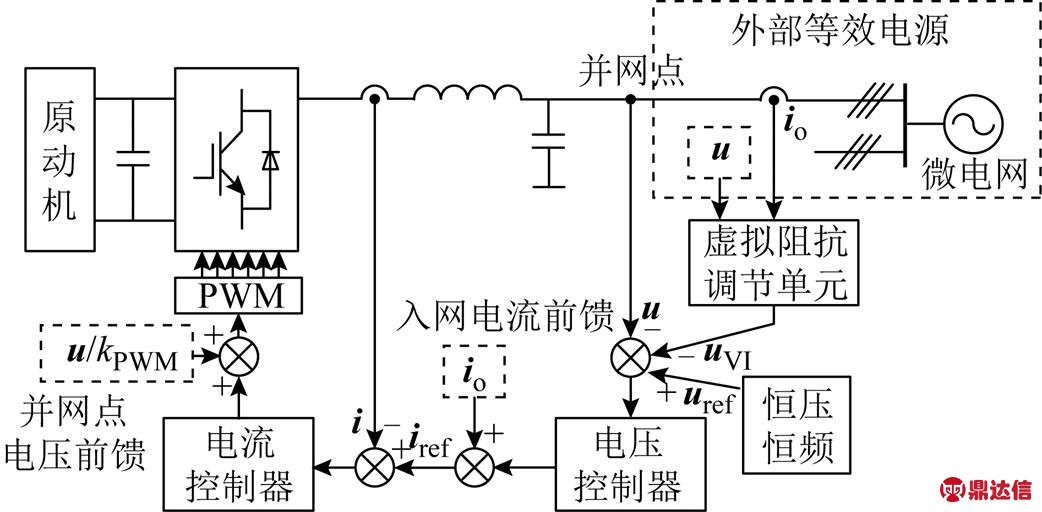
图1 逆变型DG控制系统
Fig.1 Control system of inverter-based distributed generator
微电网正常运行时,U/f-DG作为孤岛微电网的电压和频率支撑,确保微电网中负荷和其余从属DG正常工作,其并网点电压精确跟踪基准电压,如式(1)所示。
 (1)
(1)
当微电网中线路发生故障时,U/f-DG外部的等效阻抗急剧减小,造成电网电压跌落、逆变器输出电流增大,可能引起电压不对称或畸变,严重危害逆变器安全运行。为了保证微电网的正常运行,本文采用虚拟阻抗法,通过增加虚拟阻抗压降改变电压控制器的参考信号,从而改变并网点电压。因此,并网点电压变为
 (2)
(2)
本文采用dq旋转坐标系对控制系统进行设计。考虑到电抗对谐波的敏感性,将参与虚拟电抗压降计算的入网电流进行低通滤波,使虚拟电抗仅在低频部分表现其电抗特性。虚拟阻抗的压降计算式为
 (3)
(3)
式中,iod、ioq分别为入网电流d、q轴分量;ud,VI、uq,VI分别为虚拟阻抗压降d、q轴分量;ωc.lpf为一阶低通滤波器的截止频率;RV、LV分别为虚拟阻抗的电阻和电感分量,其值可根据外界故障条件,综合考虑相电流约束与控制目标进行设计。
根据基于虚拟阻抗的控制策略,U/f-DG的故障稳态模型可分为正序故障模型和负序故障模型,如图2所示。当微电网发生三相短路故障时,故障网络对称,故其并网点电压只有正序分量,此时故障模型仅包含图2a所示的正序模型,等效为恒定电压源uref与虚拟阻抗Zv的串联。当微电网发生不对称短路故障时,不对称电流通过故障线路导致并网点电压不对称,若微电网采用中性点不接地方式,则并网点电压包含有正序分量和负序分量。故此时故障模型不仅含有图2a所示的正序模型,还含有图2b所示的负序模型。其中uf1、uf2分别表示并网点的正序电压和负序电压,if1、if2分别表示逆变器输出的正序电流和负序电流,C表示滤波电容。

图2 U/f-DG的故障稳态模型
Fig.2 Steady-state fault models of U/f-DG
逆变器的故障稳态模型可用于微电网故障稳态分析,并为U/f-DG的限流算法及虚拟阻抗阻感比的设计提供理论模型。
2 U/f-DG的限流算法
2.1 直接限流法
微电网发生故障时,网络的故障等值阻抗降低,随着逆变器控制系统的调节作用,并网点电压被抬升,导致U/f-DG输出电流迅速增大。为保证逆变器的功率器件不被损坏,流过逆变器的电流不得超过最大允许值Ilim(一般为2倍额定值)。假设逆变器控制系统中的电流控制器具有足够大的调节范围,则直接限流法可将电流控制器中的d、q轴参考信号幅值限制在Ilim之内,如图3所示。
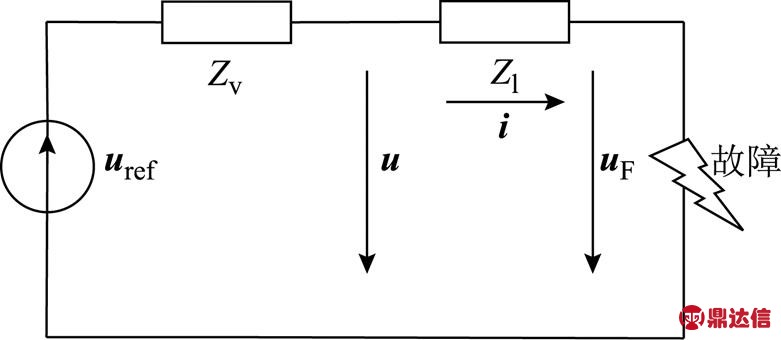
图3 电流参考信号限流环节
Fig.3 Saturation function of current references
图3中uref.d、uref.q表示电压控制器d、q轴参考信号;ud、uq表示并网点电压的d、q轴分量;iref.d、iref.q表示电流控制器d、q轴参考信号。当发生三相对称短路故障时,逆变器输出电流d、q轴分量id、iq仅含直流分量,该限流方法可以将id、iq幅值严格限制在Ilim之内,因此可以具有较好的限流效果。
当发生不对称短路故障时,线路上同时存在正序电流和负序电流。逆变器为维持输出电流的正弦性,id、iq除了含有正序电流幅值的直流分量外,还叠加了负序网络所引起的二倍频振荡分量[18],即
 (4)
(4)式中,If1、If2分别为正、负序电流的幅值。
以BC两相短路为例,若iref.d、iref.q的直流分量与振荡分量的叠加达到Ilim,则振荡分量会被削平,如图4a所示。以其为参考信号的输出电流将会发生畸变,如图4b所示,这不利于微电网故障情况下的稳定运行。同时,使用直接限流法会导致电压调节器处于失控状态,不利于对微电网进行电压支撑。
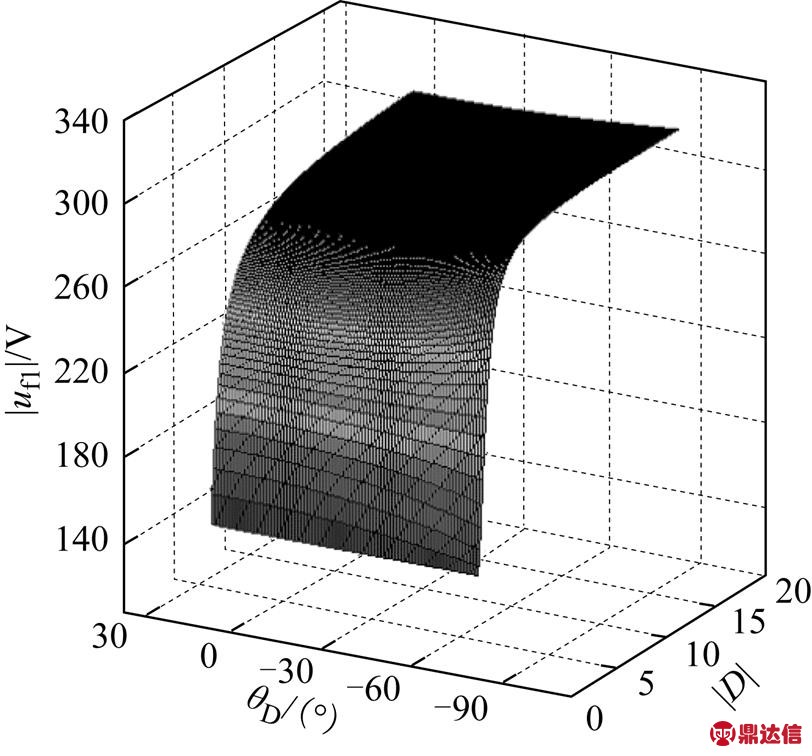
图4 BC相短路时采用直接限流法的U/f-DG仿真波形
Fig.4 Simulation curves of U/f-DG with current reference saturation limiting when BC phase fault occurs
2.2 限流算法的改进
针对直接限流法存在的问题,本文采用虚拟阻抗法对其进行改进。通过虚拟阻抗计算出虚拟电压降,减少电压控制器的参考信号,避免电流控制器的参考信号超过最大允许值,保证U/f-DG输出电流不越限。该方法可增加U/f-DG的输出阻抗,通过影响线路参数的方式,实现对逆变器的限流控制。
本文所研究的微电网采用中性点不接地方式,因此仅考虑U/f-DG在三相短路和两相短路下的处理方法。采用三相全桥逆变器的U/f-DG无法对其输出电流进行独立控制,故本文利用三相电流与其序分量之间的关系对其输出电流幅值进行限制。
数学阅读不像文学阅读,有故事性与趣味性,很多学生在阅读时缺乏耐心,缺乏克服困难的勇气,导致阅读能力不高。

图5 限流边界示意图
Fig.5 Current limiting boundary
以两相短路为例,其电流矢量轨迹的长轴为正、负序电流幅值之和,短轴为正、负序电流幅值之差,为了将该轨迹限制在限幅边界内,使正、负序电流幅值满足
 (5)
(5)
根据图2所示U/f-DG故障稳态模型,可以得出正、负序电流的计算式分别为
(6)
 (7)
(7)
将式(6)、式(7)代入式(5),并按照正、负序电流幅值之和最大为Ilim计算,可求得虚拟阻抗幅值为
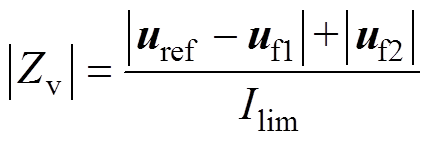 (8)
(8)根据式(8)即可实现对虚拟阻抗幅值的求解。通过进一步设置阻感比,按照图6所示的方式求出虚拟阻抗的最终解,实现对逆变器并网点电压的灵活控制。
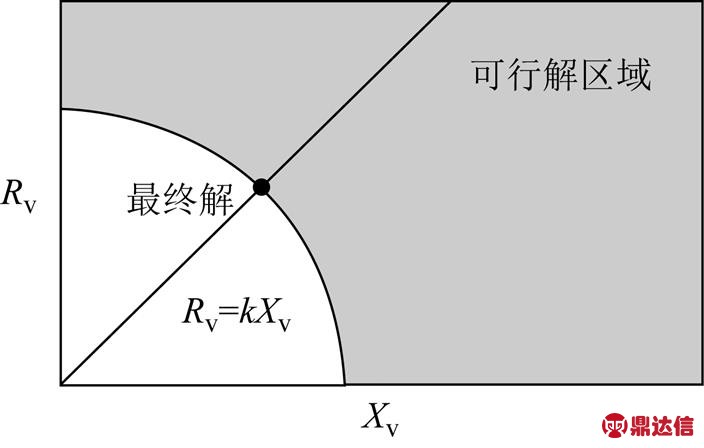
图6 虚拟阻抗可行解区域
Fig.6 Feasible solution area of virtual impedance
在图6中,灰色区域为式(5)~ 式(7)联立所确定的虚拟阻抗取值范围,即为可行解区域,弧形曲线为式(8)所计算的虚拟阻抗幅值最小值,直线表示虚拟阻抗的电阻分量Rv与电抗分量Xv的比值关系,弧形曲线与直线的交点即为虚拟阻抗的最终解。
3 虚拟阻抗阻感比设计方法
3.1 两相短路
当线路发生两相短路故障时,由对称分量表示的故障点的边界条件为
(9)
式中,uf1.F、uf2.F分别为故障点的正、负序电压;if1.F、if2.F分别为故障点的正、负序电流。根据式(9)所给出的边界条件及U/f-DG故障稳态模型,可得微电网发生两相短路时的复合序网如图7所示,图中Zl为逆变器并网点至故障点的线路阻抗。
图7 微电网两相短路时的复序网络
Fig.7 Complex sequence of two-phase short circuit
线路的正、负序阻抗基本相等,故根据图7可以计算出逆变器并网点处的各序电压分量。
 (10)
(10)
 (11)
(11)
从式(10)、式(11)可以看出,影响逆变器并网点正、负序电压的因素主要是故障网络中线路阻抗与虚拟阻抗之间的关系,故定义匹配系数D来反映两者之间的关系。
 (12)
(12)式中,θv,θl分别为虚拟阻抗和线路的阻抗角;|D|和θD分别代表匹配系数的幅值和相角。由于θv∈[0o,90o],故θD∈[θl-90o,θl],例如典型低压微电网线路阻感比[19]为0.642/0.083,其线路阻抗的相角θl为7.36o。
电压不平衡度是衡量电能质量的重要指标之一,当微电网发生不对称故障时,并网点电压存在负序电压分量,造成三相电压不平衡,这将影响三相负荷的安全运行,故为了抑制负序电压,改善三相电压不平衡,选用电压不平衡度最小为控制目标。电压不平衡度[20]εu可定义为负序电压与正序电压幅值之比,计算式为
 (13)
(13)
将式(10)、式(11)代入式(13),可得
 (14)
(14)根据2.2节的限流算法以及固定的故障位置,可分别确定出虚拟阻抗和线路阻抗幅值,所以|D|为定值,故εu是关于θD的一元函数。通过余弦定理可将式(14)改写为
 (15)
(15)
式中,A=1+4|D|2,B=4|D|。根据θD的取值范围以及余弦函数的单调性,可以得知当0≤θD≤7.36o时,函数单调递增;当-82.64o≤θD≤0 o时,函数单调递减。故当θD为0时,εu值达到最小,即设置虚拟阻抗与线路的阻感比相同时,电压不平衡度达到最小。
当故障线路由不同阻感比的线路段组成,或线路中连接了大功率感应电机时,不对称故障可导致敏感负荷的并网点电压不对称跌落,增加敏感负荷处的电压不平衡度。通过对称分量反变换,求出敏感负荷并网点的相电压表达式为
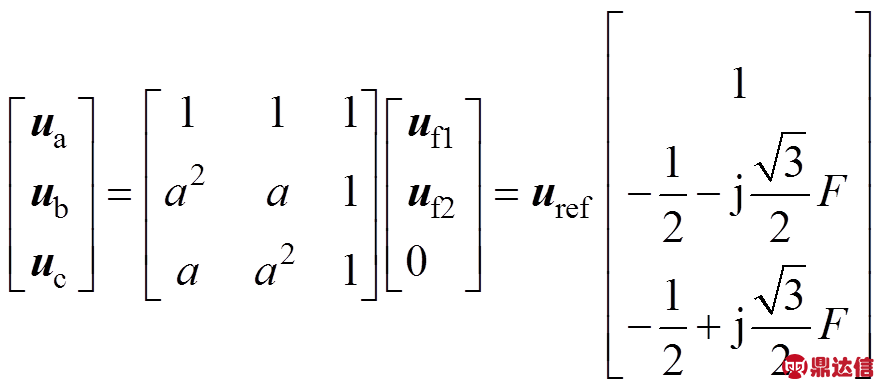 (16)
(16)式中,a=ej120°,a2=ej240°;ua、ub、uc分别为敏感负荷处的A、B、C三相电压;F为定义的下降参数,反映敏感负荷并网点两侧线路阻抗的关系。
 (17)
(17)
式中,Z∑为敏感负荷并网点至U/f-DG的线路阻抗与微电源虚拟阻抗之和;Zl2为敏感负荷并网点至故障点的线路阻抗。可以看出,当Z∑与Zl2存在相位差时,即θF不为零,B、C两相电压幅值不再相等,故障相电压跌落不对称。为了改善敏感负荷并网点电压,可以调节虚拟阻抗的阻感比,使Z∑与Zl2的阻抗角接近相等,从而减小下降参数F的相角,调整敏感负荷并网点故障相电压对称跌落,降低并网点的电压不平衡度。
3.2 三相短路
当线路发生三相短路时,逆变器并网点电压不存在负序电压分量,故其等效故障网络如图8所示。
图8 微电网三相短路时的等效故障网络
Fig.8 Equivalent fault network of three-phase short circuit
根据图8,故障后并网点电压的幅值取决于逆变器的限流算法。通过故障点电压和微电源虚拟阻抗求解并网点电压,即
(18)
式中,uF为故障点电压。根据式(18)可知,输出电流的幅值越大,并网点电压的幅值越大。本文所采用的限流算法是将输出电流的幅值限制在最大允许值,故此时可以使得并网点电压达到最大,实现良好的电压支撑效果。
3.3 虚拟阻抗控制策略的电压支撑分析
目前,U/f-DG在微电网故障情况下的控制策略主要从两方面来考虑[20]:正序电压幅值、并网点电压不平衡度。将式(12)代入式(10),正序电压分量可以表示为
(19)正序电压幅值|uf1|与匹配系数幅值|D|、匹配系数相角θD之间的关系如图9所示。
图9 正序电压幅值与匹配系数之间的关系
Fig.9 Relation among amplitude of positive sequence voltage and matching coefficient
根据图9,可以发现正序电压幅值主要受匹配系数幅值的影响,而受匹配系数相角的影响较小。随着匹配系数幅值增大,正序电压逐渐增大并趋近于电压基准信号uref。
由式(12)可知,匹配系数反映了故障网络中线路阻抗与虚拟阻抗之间的关系。当微电网发生故障时,故障位置固定,则线路阻抗幅值确定,因此满足DG电流限幅要求的最小阻抗幅值即可以最大程度提高并网点正序电压幅值。同时,为进一步提高并网点电压支撑效果,本文对虚拟阻抗阻感比进行设计,使U/f-DG并网点电压不平衡度最小化。
4 U/f-DG与从属DG的协调控制策略
微电网运行在孤岛模式时,U/f-DG为整个微网提供稳定的电压和频率,其从属DG一般采用PQ控制模式,从而使整个系统达到功率平衡。当微电网发生故障时,为维持系统稳定,U/f-DG和PQ-DG均需进行低电压穿越控制。由于故障发生后,微电网必会经历一段暂态过程,为实现平稳切换,本文提出分阶段的协调控制策略,如图10所示。
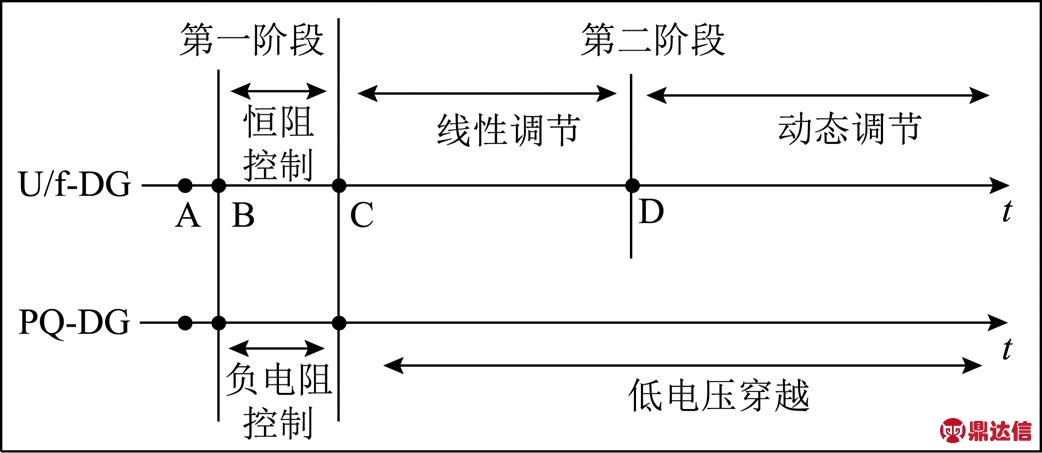
图10 协调控制策略示意图
Fig.10 Illustration of coordinated control strategy
在图10中,A点表示微电网故障发生的时刻,B点表示U/f-DG和PQ-DG检测到故障的时刻,此时进入协调控制的第一阶段,这一阶段一直持续到C点,持续时间一般为1~1.5个工频周期,该阶段可称为恒阻阶段。在恒阻阶段,U/f-DG虚拟阻抗值的设置需考虑逆变器可以在最严重的短路故障下实现限流效果,即令逆变器出口处三相短路时输出电流在最大允许值之内。在这一阶段,逆变器控制系统测量并网点电压幅值Uabc和入网电流幅值Io.abc,计算各相等效阻抗,然后通过比较各相等效阻抗,实现故障类型的判断,从而设置第二阶段的虚拟阻抗调节速率。在同一阶段,PQ-DG输出阻抗设置为一组较大的对称负电阻,即并网点相电压与各相电流呈正比,这是由于PQ-DG的故障电流会对等效阻抗的测量产生一定的影响,有时甚至会对故障类型误判,故PQ-DG采用恒定负电阻控制策略。
在图10中,从C点开始表示协调控制进入第二阶段,该阶段U/f-DG虚拟阻抗设置值根据逆变器输出电流及并网点电压进行调节,该阶段可称为调节阶段。为了兼顾稳定性与调节速度,本文在调节阶段对U/f-DG采用分段线性调节和动态调节,控制原理如图11所示。

图11 调节阶段控制原理图
Fig.11 Illustration of coordinated control principle
首先,微电源控制系统将虚拟阻抗以较高速率减小,同时对U/f-DG的输出电流进行持续测量,当最大相电流幅值Imax远小于Ilim时,说明此时微电网的状态与预期的稳态差距较大,仍需要进行快速线性调节,逐步减少虚拟阻抗,即增大逆变器并网点电压。当Imax与Ilim相差不大时,虚拟阻抗减小的速率降低,防止由于调节惯性,导致输出电流越限。当Imax接近Ilim时,控制系统转换为动态调节,虚拟阻抗值根据当前网络情况,进行动态设置。需要说明的是,控制系统工作在线性调节时,针对三相短路故障和两相短路故障,其虚拟阻抗调节速度不同。这是由于三相短路故障较两相更为严重,当故障微电网到达稳态时,两相短路故障所需要设置的虚拟阻抗值较小,为尽快完成控制目标,故两相短路虚拟阻抗调节速率较快。
在图10中,D点以后是调节阶段的动态调节部分,应用2.2节的限流算法,以及根据微电网结构设置虚拟阻抗阻感比的故障控制策略。U/f-DG时刻测量其逆变器出口处电压,并计算出一组新的虚拟阻抗值,经过1~2个工频周期,微电网到达稳定状态,实现预期的控制目标。在调节阶段,PQ-DG则根据实际情况采用相应的低电压穿越控制策略。
传统的U/f-DG故障控制策略侧重于故障电流的限制,缺乏对DG并网点电压的控制。本文提出的控制策略则进一步考虑U/f-DG并网点电压的支撑效果,与现有控制策略相比,它具有以下优点:
1)当微电网发生故障时,保持U/f-DG输出电流以及并网点电压正弦性,有助于维持微电网稳定。
2)本文所提的限流方法以及虚拟阻抗的阻感比设计方法,不仅可以动态计算虚拟阻抗幅值,尽可能提高微电网电压,保证输出电流不越限,还可以实现不对称故障时并网点电压不平衡度最小化。
3)采用协调控制策略,消除微电网故障暂态过程的不利影响,平稳地实现U/f-DG的控制目标。
4)根据本文提出的故障控制策略,U/f-DG的故障稳态模型等效为恒定电压源与阻抗的串联,有利于微电网故障稳态分析。
5 仿真验证
为验证本文所提出的U/f-DG故障控制策略的有效性,本文基于MATLAB/Simulink平台搭建如图12所示的微电网模型。
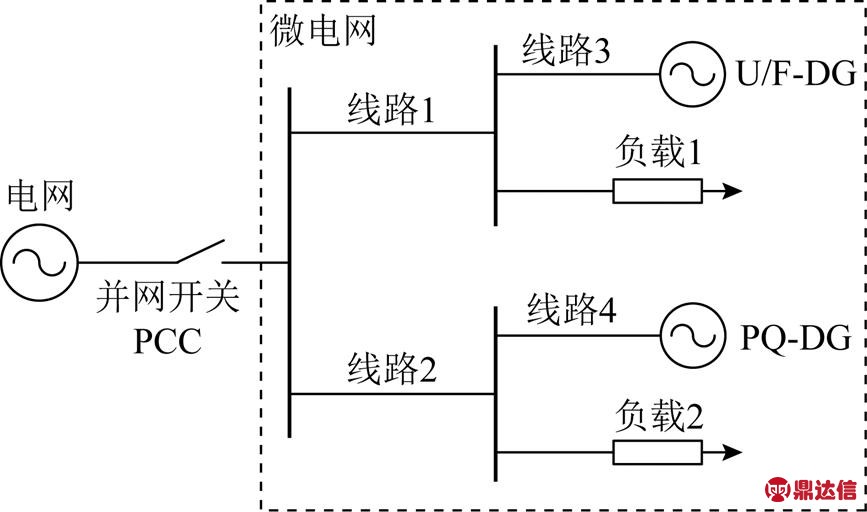
图12 微电网结构图
Fig.12 Structure diagram of microgrid
当并网开关断开时,微电网在孤岛模式下运行,其参数见表1。U/f-DG逆变器输出电流最大允许值取其额定电流的2倍,即故障电流峰值不能超过80 A。在本文的所有算例中,恒阻阶段持续时间设置为一个工频周期,U/f-DG虚拟阻抗设置为3.9 Ω,根据控制目标设置阻感比,PQ-DG输出阻抗设置为10 Ω的对称负电阻。在线性和动态调节阶段,PQ-DG的低电压穿越控制采用恒功率控制,并只输出正序电流,最大相电流峰值不超过40 A,PQ-DG在故障控制阶段优先输出有功功率(微电网正常运行时输出功率为6 kW+3 kvar)。
表1 微电网参数
Tab.1 Parameters of Microgrid

算例1:当t=0.06 s时,微电网在线路2中点发生三相短路故障,过渡电阻为2 Ω,仿真波形如图13所示。0.06~0.08 s为恒阻阶段,U/f-DG设置为恒定虚拟阻抗,虚拟阻抗阻感比与线路阻感比相同,逆变器控制系统在恒阻阶段结束时,检测到三相阻抗均为1.51 Ω,故判断线路发生三相短路故障。线性调节阶段从0.08 s开始,虚拟电阻与电抗按照线路阻抗比线性递减,U/f-DG并网点电压与输出电流线性上升,当Imax与Ilim相差不大时,虚拟阻抗减小的速率降低,如图13c所示,至0.112 s时,控制系统检测到输出电流接近其最大允许值,系统切至动态调节阶段,最终故障微电网到达稳定状态,并网点电压稳定值为120 V,实现对逆变器输出电流的限制以及并网点电压的抬升。图13b中虚线表示相电流最大允许值,在故障期间,U/f-DG各相电流始终维持在安全范围之内。

图13 算例1仿真结果
Fig.13 Simulation results of case 1
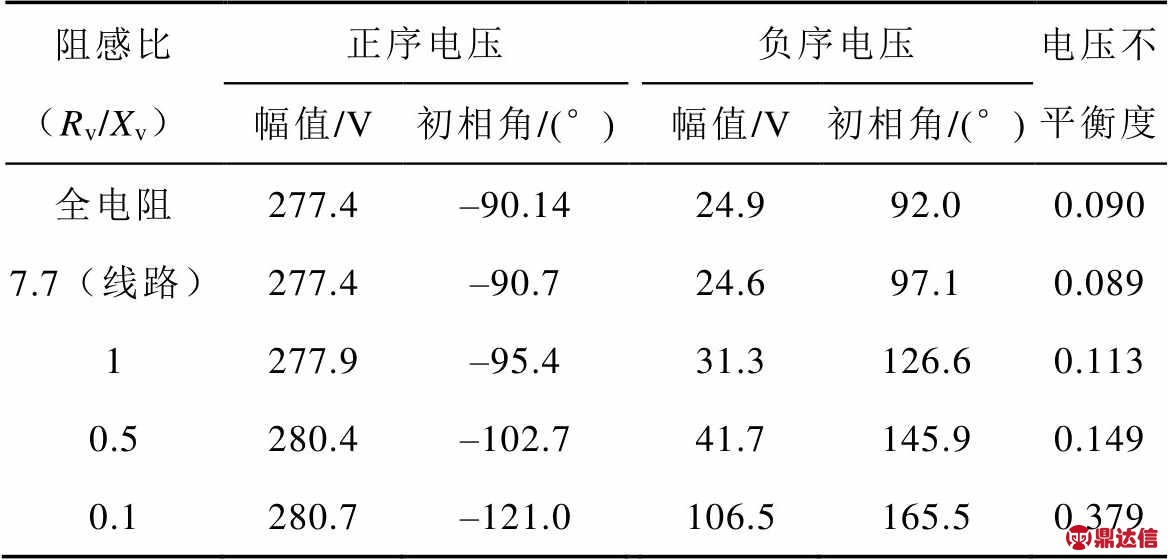
算例2:当t=0.06 s时,微电网在线路2中点发生BC两相短路故障,过渡电阻为6 Ω,仿真波形如图14所示。首先对虚拟阻抗与线路阻抗阻感比相同时的仿真结果进行分析,其恒阻阶段与算例1相同,也为0.06~0.08 s;其线性阶段为0.08~0.128 s,由于虚拟阻抗调节速度的增加,将线性阶段控制在3个工频周期之内。在0.128 s之后,逆变器控制系统进入动态调节阶段,最终微电网到达故障稳态,此时并网点故障相电压为265 V,非故障相电压为299 V,并且逆变器输出电流限制在最大允许值之内,非故障相电流为16 A,故障相电流为76 A,该值与最大允许值80 A有一定差距,这是因为两相短路时的电流矢量轨迹长轴不一定位于故障相,这取决于正、负序电流的初相位差,如图5所示。
在该算例中,依次设置阻感比不同的虚拟阻抗,故障前电压为307.7 V∠-89.8°,故障后的仿真结果见表2。可以看出虚拟阻抗与线路的阻感比差距越大,其电压不平衡度越大,验证了本文理论推导的正确性,证明了当虚拟阻抗与线路阻感比相同时,并网点电压不平衡度最小。
图14 算例2仿真结果
Fig.14 Simulation results of case 2
表2 两相短路时不同阻感比虚拟阻抗的仿真结果
Tab.2 Simulation results of different virtual impedance R/X radio when two-phase short circuit fault occurred
算例3:为验证微电源虚拟阻抗对敏感负荷并网点电压的调节作用,将线路3的单位阻抗修改为(0.161+j0.190)Ω,模拟线路由不同阻感比的线路组成。首先,设置虚拟阻抗与线路3阻感比同为0.85,在0.06 s时,线路2处发生BC两相短路,过渡电阻为6 Ω,仿真波形如图15a所示。当微电网达到故障稳态时,A、B、C三相电压分别为302 V、260 V、213 V,负荷并网点电压不平衡度为0.201,电压出现不对称跌落,不利于敏感负荷进行故障穿越。设置虚拟阻抗为全电阻,在0.06 s时,线路2处发生BC两相短路,过渡电阻为6 Ω,仿真波形如图15b所示。当微电网达到故障稳态时,A、B、C三相电压分别为301 V、265 V、260 V,电压不平衡度为0.095。可以看出,通过改变虚拟阻抗的阻感比,基本实现负载1处的电压对称跌落,并降低了该点的电压不平衡度。这说明设置合适的虚拟阻抗阻感比可以降低敏感负荷并网点电压不平衡度,实现对敏感负荷的电压支撑。
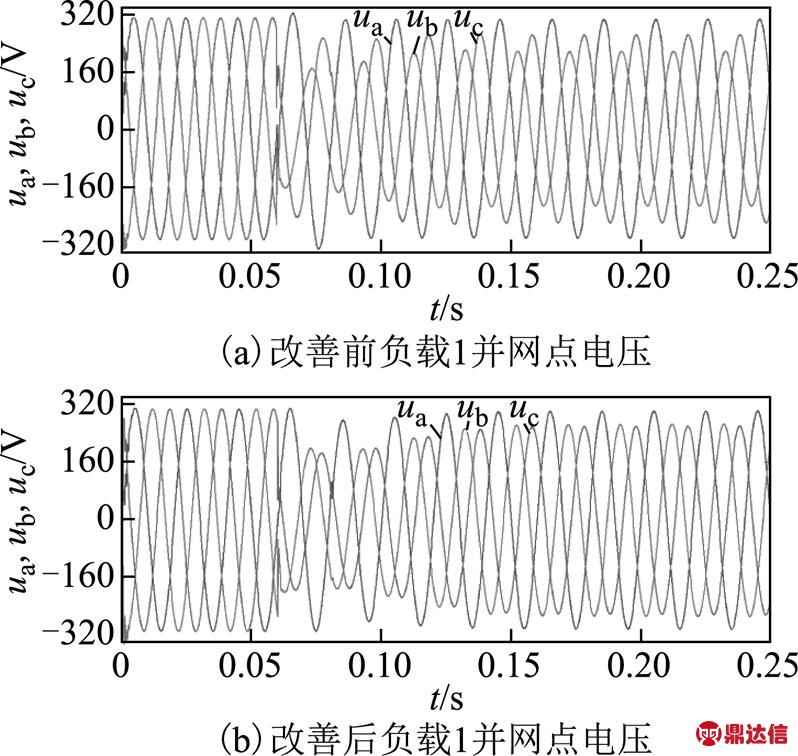
图15 算例3仿真结果
Fig.15 Simulation results of case 3
6 结论
本文针对U/f控制的逆变型分布式电源在微电网故障时的低电压穿越控制算法进行了研究,得出以下结论。
1)基于虚拟阻抗的U/f-DG在微电网发生故障时,其在正序网络中等效为恒定电压源串联虚拟阻抗,在负序网络中等效为电压为零的负序电压源串联虚拟阻抗,虚拟阻抗的幅值可根据电流矢量限幅边界以及逆变器并网点电压确定。
2)采用本文提出的基于虚拟阻抗的故障控制策略,在三相短路时,可以实现并网点电压幅值达到最大;在两相短路时,设置虚拟阻抗与线路阻感比相同,可以实现并网点正、负序电压幅值之比达到最大,即电压不平衡度最小。并可根据微电网结构及控制目标对虚拟阻抗阻感比进行调整。
3)U/f-DG与其从属DG使用分阶段的协调控制策略能够使微电网平稳度过故障暂态,实现对逆变器输出电流的限制和并网点电压的支撑,仿真结果验证了本文所提出控制策略的准确性和有效性。


