
摘 要:建立了交流稳压电源主电路数学模型并分析其闭环稳压控制原理。由于装置具有较强的非线性和变结构、变参数特性,采用经典PID控制器很难获得理想的控制效果。将人工神经网络与传统PID控制器相结合,构成一种不依赖于被控对象精确数学模型的神经网络PID控制器。为了提高神经网络的收敛速度,采用Levenberg-Marquardt算法计算连接权值更新量,并对当前解施加一个以一定概率保留的随机扰动,加快迭代过程跳出局部极小点。对装置主电路和改进神经网络PID控制器进行仿真,结果表明:系统动态响应快,鲁棒性强,调节平滑,具有较好的控制效果。最后,制造并测试了额定电压660 V、容量400 kVA的实验样机,对理论研究进行了实验验证。
关键词:交流稳压电源;PID控制器;人工神经网络;Levenberg-Marquardt算法;连接权值
0 引 言
交流稳压电源抑制供电系统中由于大容量负载启停、供电线路损耗、闪电雷击等因素引起的公共连接点电压波动[1-3],提高供电质量。随着电力电子技术的发展、控制策略的成熟以及微处理器运算速度的提升,装置中的自耦变压器逐渐被大功率电力电子变换器取代,实现了无机械触点和电压连续补偿,并通过引入先进的控制方法大大提高了装置的自动化程度[4-7]。
为了获得较高的功率密度,装置中补偿变压器的磁路通常设计得比较饱和,同时,电力电子变换器的开关控制方式导致了高度的非线性及变结构、变参数特性,精确的系统数学模型难以建立。然而,对于时变非线性控制对象,采用局部线性化方法设计的经典PID控制器很难达到理想的控制效果,因此,装置普遍存在稳压精度低、响应慢、输出电压超调量大、波形振荡和负载适应性差等问题。
文献[8]采用神经网络在线辨识自学习整定控制器和重复控制器共同对正弦波逆变电源进行控制,实现了输出电压对指令值的较快跟踪,但该方法需要对输出相应于输入的灵敏度函数进行在线辨识,实现较复杂;文献[9]提出在DC-DC斩波电源中应用非线性PID控制,增强了系统对参数扰动的鲁棒性和适应性,但是存在控制参数难以选取的问题;文献[10]引入一种前馈B-样条神经网络控制算法与经典比例-微分算法对UPS电源逆变器进行并行控制,输出波形响应快且正弦度好,但是稳态误差较大,难以达到较高的控制精度;文献[11]研究了神经网络PID算法在并网逆变电源的比例谐振控制器参数自整定过程中的应用,显示出对并网电流较好的控制,但采用BP算法导致神经网络的收敛速度慢,且易陷入局部极小点。
本文建立了交流稳压电源中整流电路、制动电路、补偿变压器、逆变电路和滤波器等环节的数学模型,分析了各环节的工作原理和闭环稳压控制策略;将人工神经网络与经典PID控制器结合,构建了一种比例、积分和微分系数在线调节的神经网络PID控制器;设计了一种改进的连接权值更新算法用于优化神经网络的反向迭代收敛过程;仿真和实验验证了本文所提出控制方法的有效性。
1 系统建模
1.1 主电路拓扑
交流稳压电源主电路拓扑如图1所示,符号“+”标明补偿前电网电压、补偿电压和补偿后输出电压之间的极性关系。装置主要包括功率变换器、滤波器和补偿变压器三大部分,其中功率变换器由整流电路、直流母线电容、制动电路和逆变电路等构成。
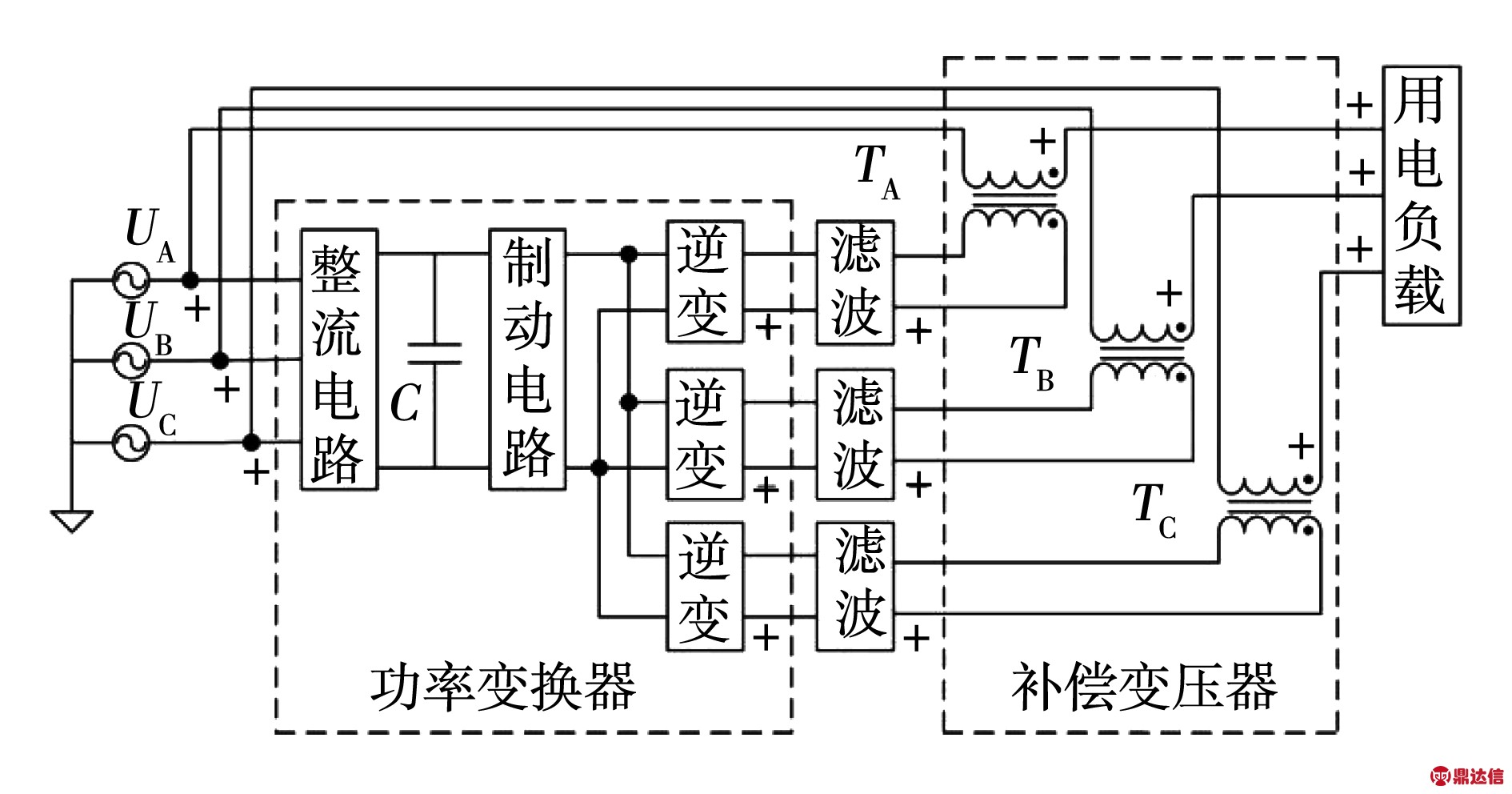
图1 主电路拓扑
Fig.1 Main circuit topology
1.2 整流电路与制动电路
如图2所示,整流电路采用三相不控整流桥,将三相交流电压转换为脉动的直流电压,再经直流母线电容C滤除脉动分量后输出稳定的直流电压,而制动电路由放电电阻R和制动开关管S组成。若稳压电源的负载运行在能量回馈状态,直流母线电容C受到回馈能量的充电作用,直流母线电压上升至高于预设值时,制动开关管S开通,直流母线电容C放电泄能。整流电路和制动电路的状态方程为
![]() 。
。
(1)
式中:udc为直流母线电容C两端的电压;iA、iB、iC为电网输入线电流;s为制动开关管的开关函数,其值为1时开关管导通;idc为直流环节的输出电流。
1.3 逆变电路和滤波器
逆变电路和滤波器的A相支路如图3所示,分别采用单相全控逆变桥和LC滤波器,将直流母线电压udc变换成高频PWM电压,经滤除高频分量后,输出工频正弦交流的A相补偿变压器初级绕组电压u1A,而B相和C相支路的结构与之相同。
忽略开关管的通态压降,则逆变电路和滤波器的状态方程为
 。
。
(2)
式中:CfA、CfB、CfC为滤波电容;LfA、LfB、LfC为滤波电感;u1A、u1B、u1C为补偿变压器初级绕组相电压;i1A、i1B、i1C为补偿变压器初级绕组相电流;ifA、ifB、ifC为滤波电感电流;sx为桥臂的开关函数,当其值为1时开关管S1x和S4x导通,而其值为0时开关管S2x和S3x导通,x表示A,B,C三相。
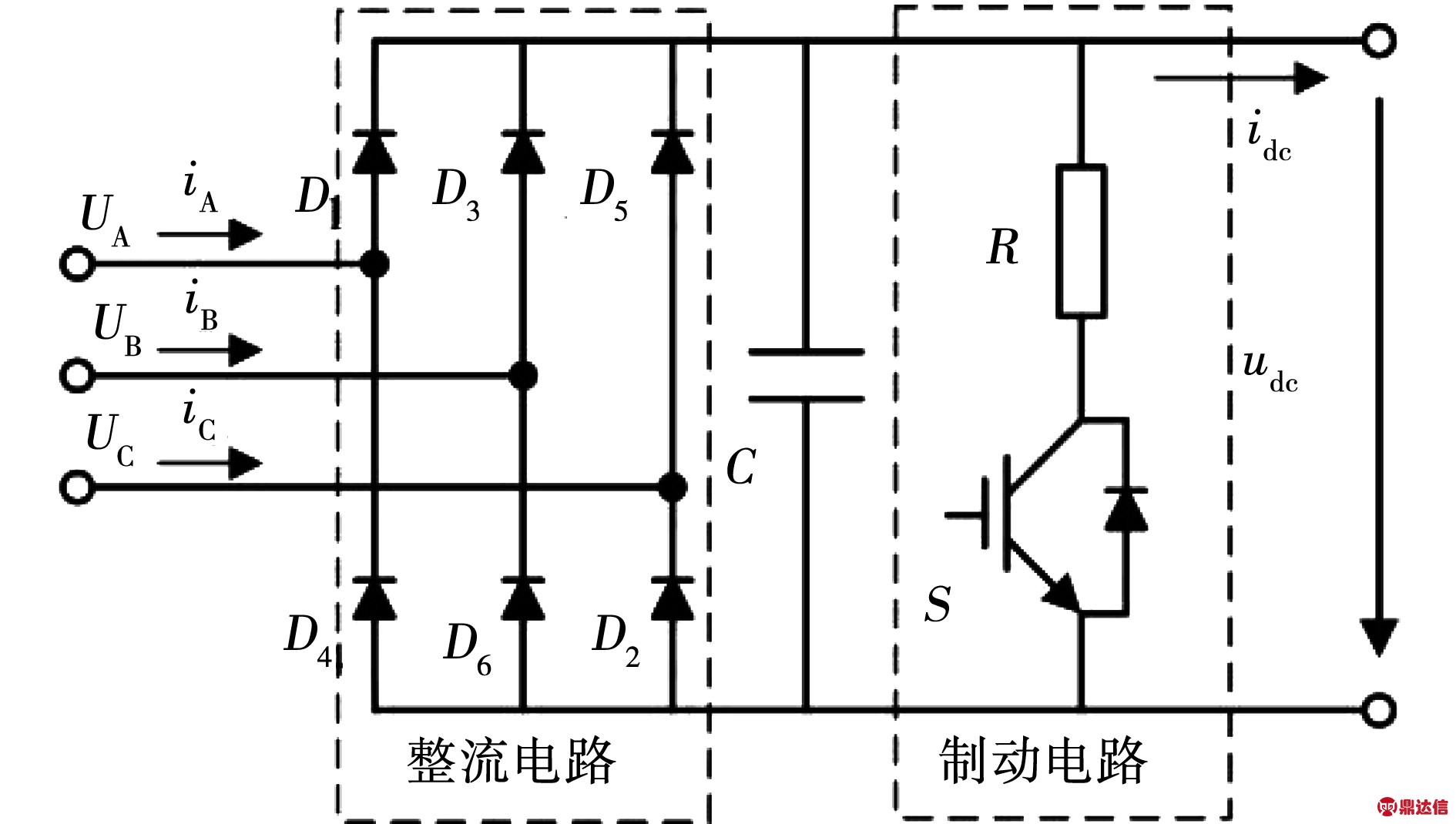
图2 整流电路和制动电路结构
Fig.2 Structure of rectifier and braking circuit
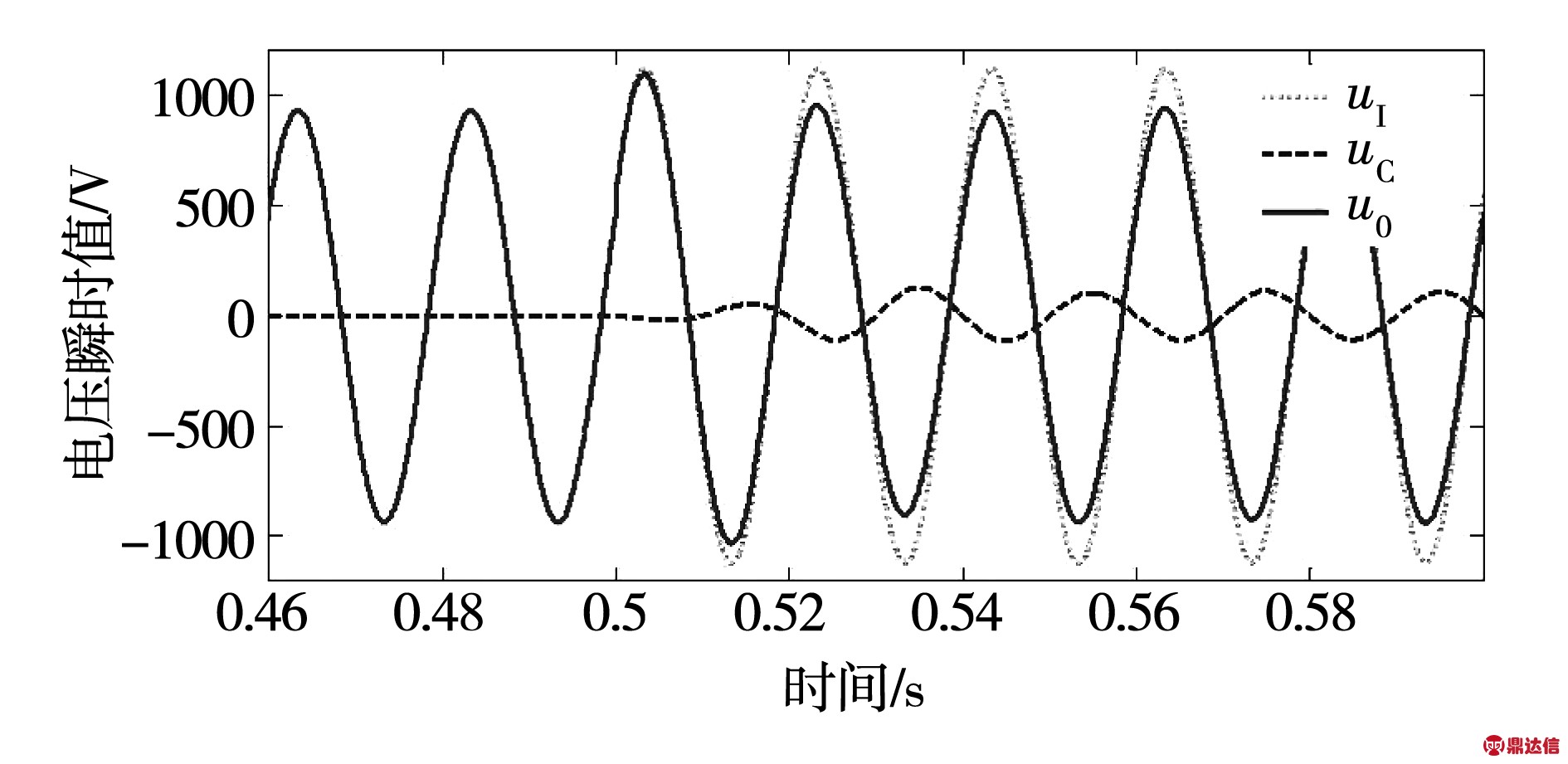
图3 逆变电路和滤波器结构(A相支路)
Fig.3 Structure of inverter and filter(A phase branch)
1.4 补偿变压器
补偿变压器是由三个单相变压器组成的变压器组,初级绕组(高压绕组)接滤波器的输出端,次级绕组(低压绕组)串接在供电电源与输出端之间,补偿变压器TA的电路结构如图4所示,TB、TC的电路结构与之相同。
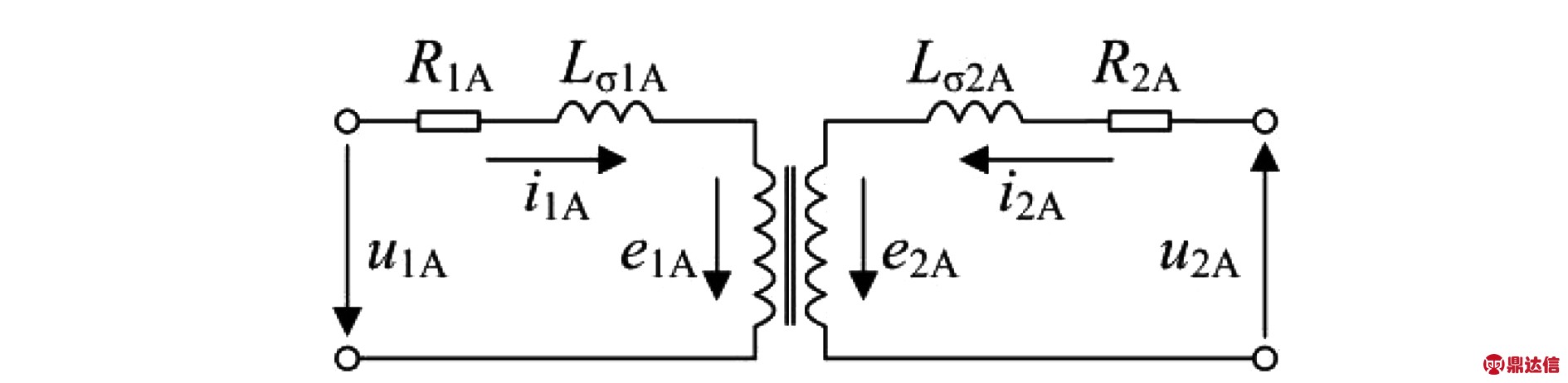
图4 补偿变压器TA电路结构
Fig.4 Circuit structure of compensating transformer TA
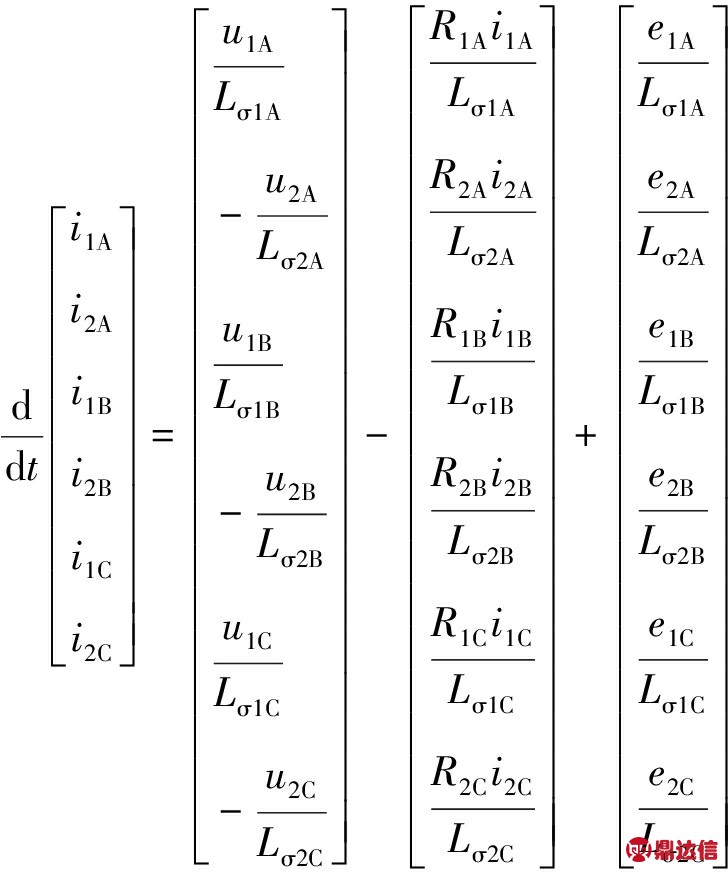
假设磁路不饱和,且不计铁心中的涡流、磁滞损耗、磁阻,补偿变压器的状态方程为
 。
。
(3)
式中:u2A、u2B、u2C为补偿变压器次级绕组相电压;i2A、i2B、i2C为次级绕组相电流;R1A、R1B、R1C为初级绕组相电阻;R2A、R2B、R2C为次级绕组相电阻;Lσ1A、Lσ1B、Lσ1C为初级绕组相漏感;Lσ2A、Lσ2B、Lσ2C为次级绕组相漏感;e1A、e1B、e1C为初级绕组相反电动势;e2A、e2B、e2C为次级绕组相反电动势。
2 工作原理分析
2.1 电网相电压相位检测
供电系统是三相三线制,并无中线引出。假设电网三相平衡,一种根据电网线电压推导出相电压相位的原理如图5所示。
设相电压有效值为Up,以![]() A的相位为参考相位,则电压相量的表达式为
A的相位为参考相位,则电压相量的表达式为

![]() 。
。
(4)
式中![]() C为电网相电压相量;
C为电网相电压相量;![]() CA是电网线电压相量。由图5可得
CA是电网线电压相量。由图5可得
![]() 。
。
(5)
由式(5)可知,检测合成相量![]() BC的相位即可得相量
BC的相位即可得相量![]() A相位。逆变电路与补偿变压器之间采用LC滤波器进行滤波,没有电压相位滞后效应;同时,单相补偿变压器初次级绕组之间的相位差可忽略。令A相电压同步信号相位跟踪合成相量
A相位。逆变电路与补偿变压器之间采用LC滤波器进行滤波,没有电压相位滞后效应;同时,单相补偿变压器初次级绕组之间的相位差可忽略。令A相电压同步信号相位跟踪合成相量![]() BC,B相和C相依次滞后120°相角。
BC,B相和C相依次滞后120°相角。
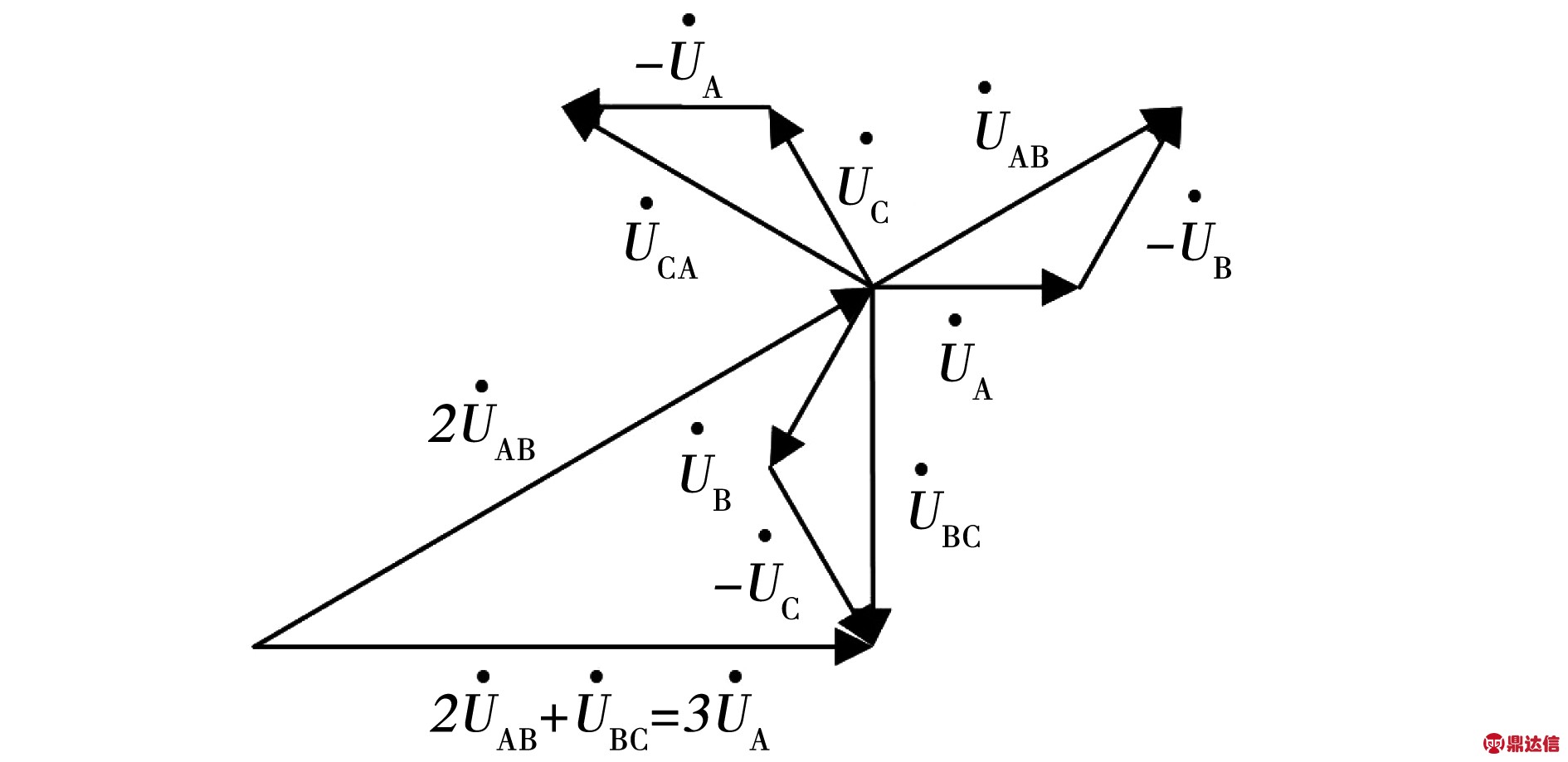
图5 电网电压相位检测原理
Fig.5 Grid voltage phase detection law
2.2 逆变电路SPWM调制
逆变电路采用双极性SPWM调制控制方式,原理波形如图6所示。正弦波us(t)为调制波,三角波ut(t)为载波,将调制波和载波求差,若差值为正则生成SPWM电压的正电平,若差值为负则生成SPWM电压的负电平。调制波的表达式为
us(t)=Ussin(ωst)。
(6)
式中:us为调制波的瞬时值;ωs为其角频率;Us为其幅值。
载波可用斜率为2Ut/π和-2Ut/π的线性函数表示,初始值分别为-Ut与Ut,其中Ut为载波的幅值,则其瞬时值ut(t)的表达式为
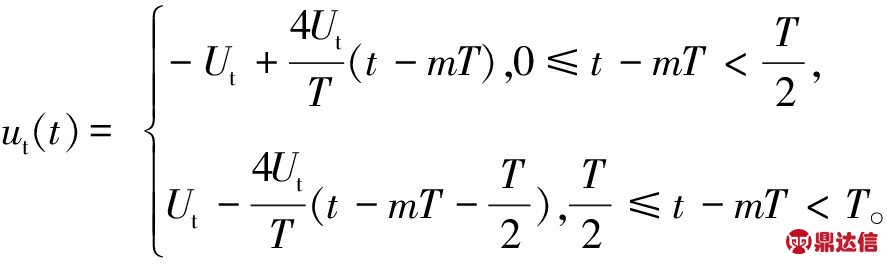
(7)
式中:T为载波周期;m为非负整数。输出PWM驱动信号的表达式为
(8)
式中:upwm为PWM驱动信号的瞬时值;δ为驱动信号脉冲宽度;n为非负整数。
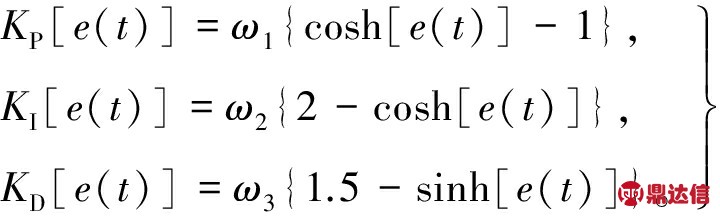
图6 双极性SPWM调制原理
Fig.6 Bipolar SPWM modulation principle
2.3 闭环稳压控制策略
电压闭环调节采用输出线电压有效值反馈的方式,原理如图7所示,主要分为补偿电压相位调节、补偿电压幅值调节和调制驱动三部分。
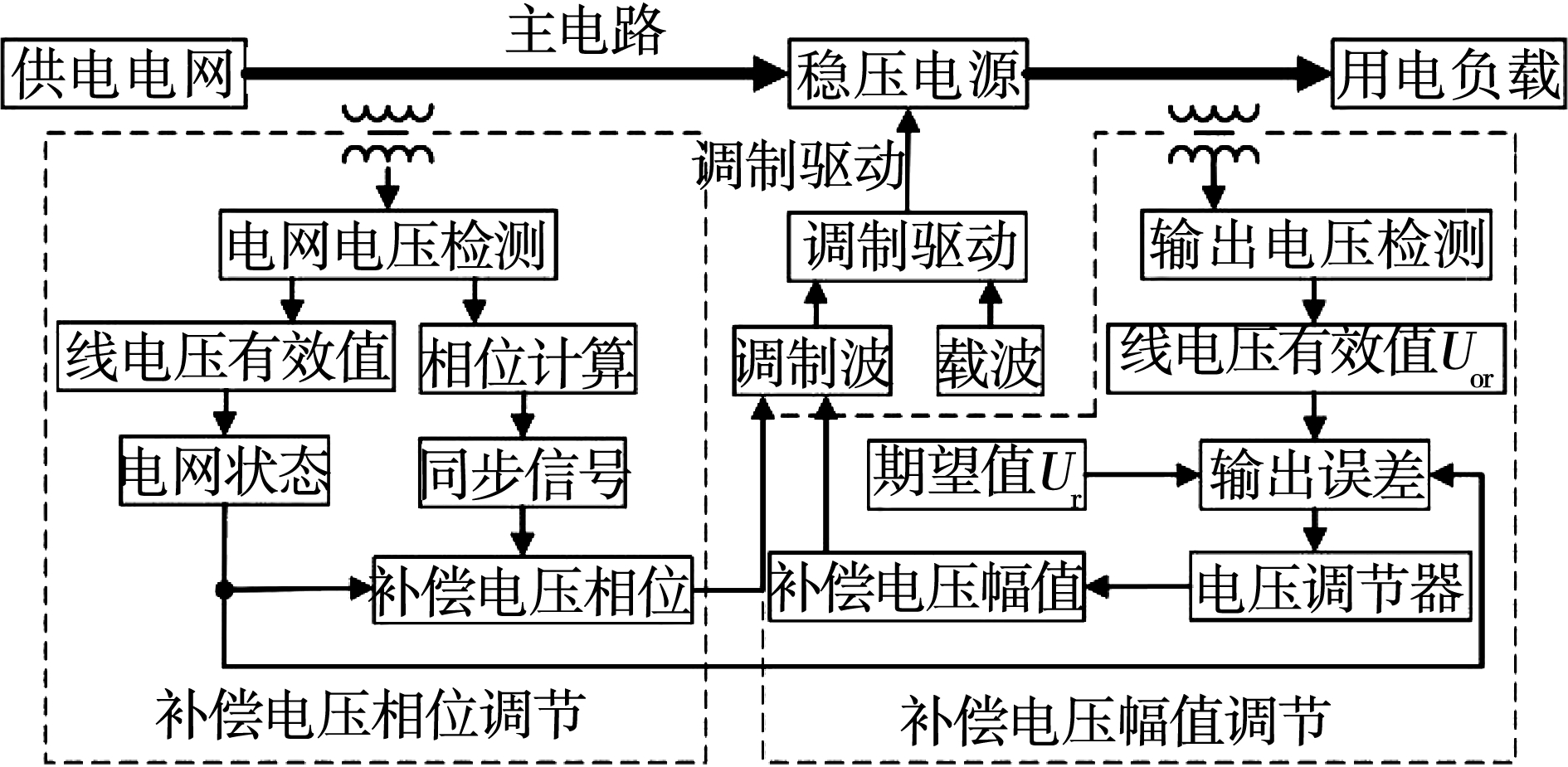
图7 电压闭环调节原理图
Fig.7 Diagram of closed-loop voltage regulation
principle
以A相为例,设相电压同步信号为sin(ωt+φ),Usl为补偿前电网线电压有效值,Ur为期望值,Uor为补偿后输出线电压有效值,UcpA为补偿电压幅值,h1为输出电压期望波动范围,h2为最大可补偿电网电压波动范围,电网电压状态系数α=Usl/Ur-1,则补偿电压ucpA(t)的表达式为
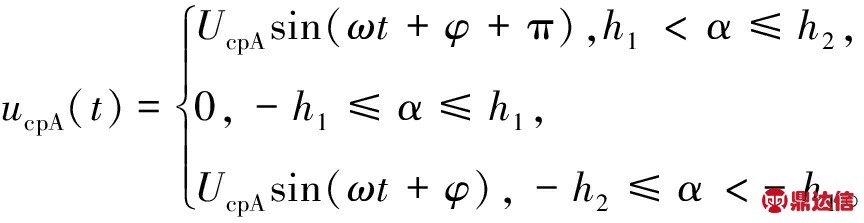
(9)
单相全控逆变桥输出电压基波幅值与SPWM调制的调制比近似成正比关系,放大系数为直流母线电压。令电压调节器的输出作为逆变电路SPWM调制的调制比,则补偿电压幅值的表达式为
![]() 。
。
(10)
式中:ω为工频角频率;N1、N2分别为补偿变压器初级、次级绕组匝数;u(t)为电压调节器的输出量,可表示为
![]() 。
。
(11)
式中:KP、KI、KD分别为PID调节的比例、积分、微分系数,E(t)为调节器的输入误差,表达式为
(12)
3 神经网络PID控制器设计
3.1 控制器模型
用比例阈值函数对误差信号E(t)进行归一化处理,设比例系数为β,则
(13)
在PID控制器中,比例系数KP的作用是加快响应速度,当误差|e(t)|较大时,增大KP可增加调节的快速性;|e(t)|较小时,减小KP可防止超调。积分系数KI的作用是累积系统误差,减小静态偏差,故当|e(t)|较大时,减小KI可防止超调;而若|e(t)|较小,KI取较大值可保持系统稳定。微分系数KD的作用是提前校正以改善系统动态性能,超调多时可取较大值,欠调多时取值小,在|e(t)|的零值附近应取中间值[12]。因此,在电压闭环调节过程中,系数KP、KI和KD与误差e(t)的理想非线性关系如图8所示。
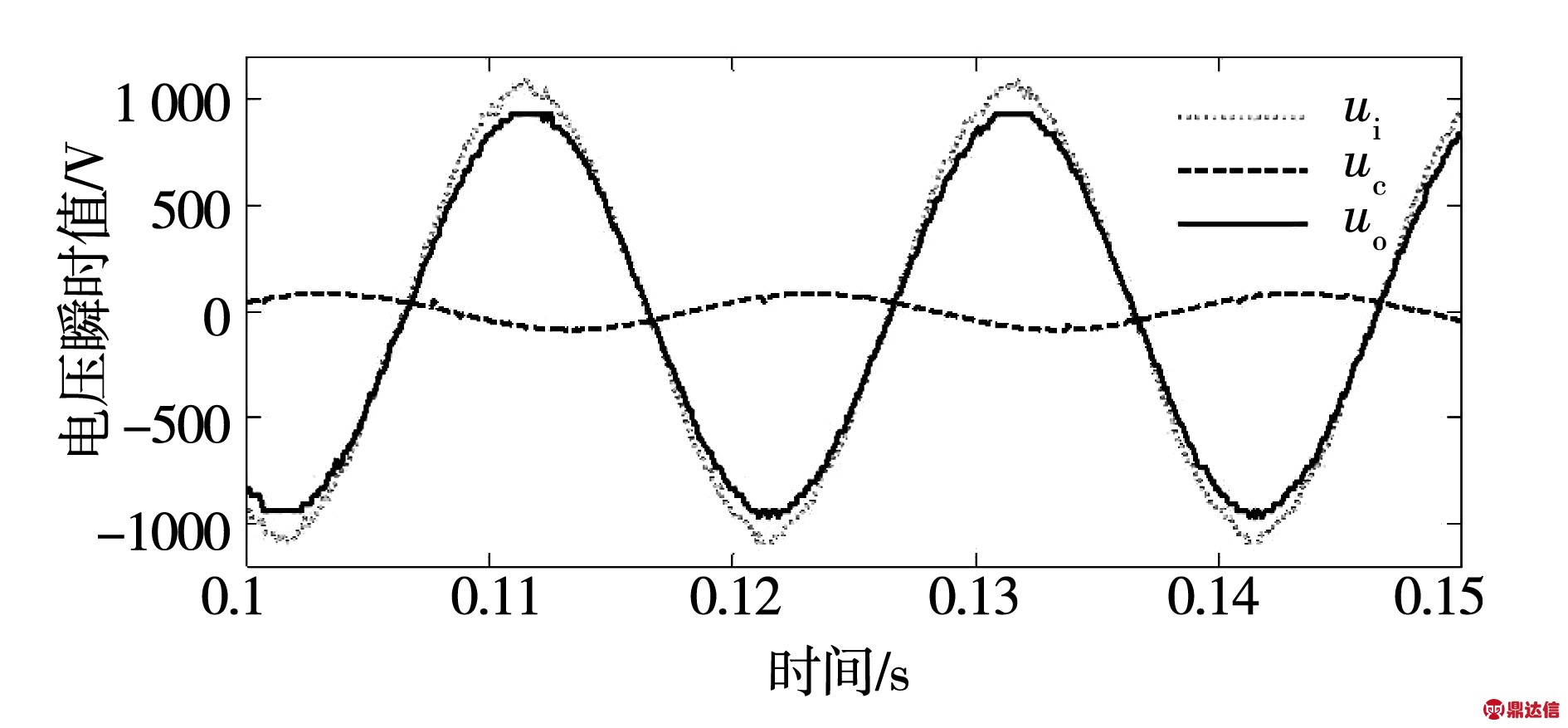
图8 系数KP、KI、KD与误差e(t)关系曲线
Fig.8 Relationship between KP,KI,KD with e(t)
将系数KP、KI和KD与误差e(t)的非线性关系进行函数拟合,可得如下表达式
(14)
式中:ω1、ω2、ω3为动态调整系数。将式(14)带入式(11),并进行离散化,可得

![]() 。
。
(15)
式中:T1为采样周期;Δe(k)=e(k)-e(k-1)。
PID控制器的控制效果取决于KP、KI和KD的整定情况,而对于交流稳压电源这样具有严重时变非线性特性的控制对象,难以建立精确数学模型导致调节系数整定不佳,同时,一次性整定得到的参数也未必能适应整个调节过程。本文在经典PID控制器的基础上,引入BP神经网络,形成一种自适应能力很强的参数可调型神经网络PID控制器。该控制器保留了经典PID控制器结构简单、易于实现的优点,且不依赖于被控对象的精确数学模型,对负载扰动和参数变化有较强抗扰能力。将式(14)拟合的非线性关系融入隐含层,利用神经网络良好的非线性逼近能力,在线对系统结构和参数进行自学习,及时调整KP、KI和KD,具有良好的鲁棒性和适应性,能够极大地提升电压闭环调节器的性能。
本文设计的神经网络PID控制器模型如图9所示,其中BP神经网络的拓扑结构为6×3×1。神经网络输出层节点输出控制量u(k),对非线性函数cosh[e(k)]和sinh[e(k)]在e(k)=0的邻域进行泰勒展开,以ω1、ω2、ω3作为隐含层到输出层的连接权值,则隐含层的激活函数s1(k)、s2(k)、s3(k)可表达为
(16)
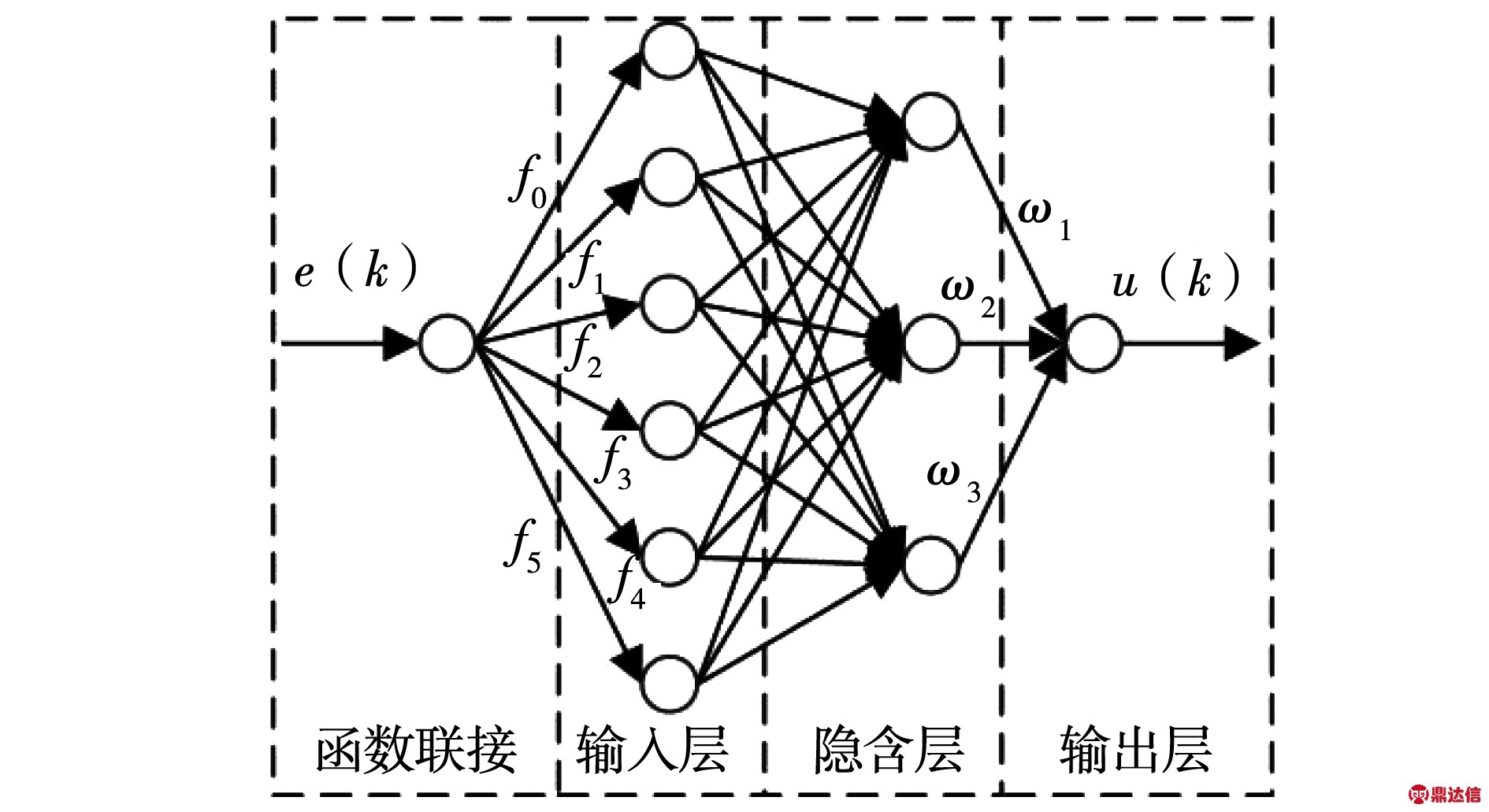
图9 神经网络PID控制器模型
Fig.9 Neural network PID controller model
采用函数联接网络[13]作用于神经网络输入层的输入矢量[i0、…、in],产生一组独立函数[f0(i0)、…、fn(in)]。函数联接网络可以增强网络学习,不易陷入局部极小解。取fn(in)=(in)n,输入矩阵为{1 e(k) [e(k)]2 [e(k)]3 [e(k)]4 [e(k)]5}T,可得输入层到隐含层的连接权值矩阵为
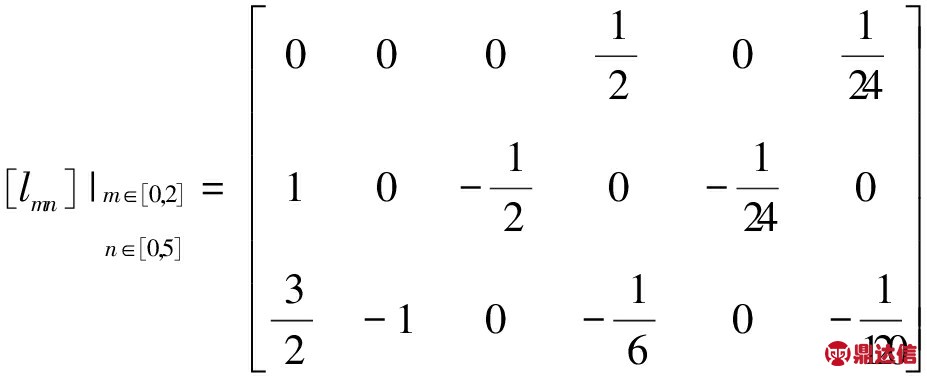 。
。
(17)
式中:矩阵元素lmn为输入层节点n与隐含层节点m之间的连接权值。
3.2 神经网络的迭代算法
Levenberg-Marquardt(L-M)算法提供了保证速度的高斯-牛顿法和保证收敛的最速下降法之间的折中,比BP算法及其改进算法迭代次数少,收敛速度快,同时还能够保证权值和阈值的每次调整都使误差减小,避免网络振荡[14-16]。
误差函数e(k)的雅克比矩阵为
![]() 。
。
(18)
不论电网欠压或过压,误差函数e(k)对隐含层与输出层间连接权值ω1、ω2、ω3的偏导数均为
![]() 。
。
(19)
式中:j=1,2,3。连接权值的更新矩阵为
![]() 。
。
(20)
式中:Δω1、Δω2、Δω3为连接权值的更新量;μ为自适应因子;I为单位矩阵。在求解过程中,性能指标V=[e(k)]2较大时,μ值取较大值;随着V的降低,μ值逐渐减小。
3.3 对传统L-M算法的改进
传统L-M算法对初始值的依赖性强,若初始值离最优解较远,迭代过程可能收敛于鞍点或局部极小点。本文设计的改进算法,其核心思想是在传统L-M算法得出连接权值的更新量后,对当前解施加一个随机扰动,扰动以一定概率保留,可使性能指标V朝增大方向移动,有助于求解过程摆脱局部极小点。具体实施步骤如下:
步骤1):对由式(20)计算得出的连接权值更新量Δωj施加随机扰动量,表达式为
δj=λ|e(k)|[rand-0.5]。
(21)
式中:δj为Δωj的扰动量,rand为0~1间的随机数,λ为调整系数。误差值|e(k)|较大时,施加大扰动值,使调节过程快速脱离局部极小点;在误差值|e(k)|逐渐减小时,扰动量也趋于零,维持系统稳定。
步骤2):计算随机扰动量的保留概率,概率生成函数:
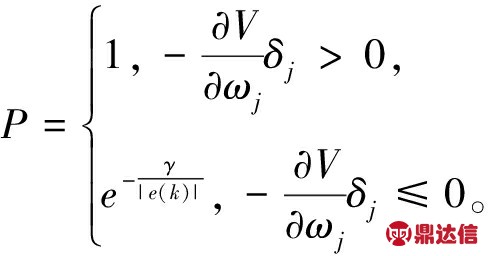
(22)
式中:P为扰动的保留概率;γ为调整系数;-∂V/∂ωj代表性能指标最速下降方向。保留概率值随误差值减小而降低,抑制稳态波动。
步骤3):判断随机扰动是否保留。随机数发生器产生一个0~1间的阈值,若保留概率大于随机阈值则保留扰动,反之则放弃,令本次扰动值为零。
步骤4):连接权值的迭代公式:
ωj(k+1)=ωj(k)+Δωj(k)+δj(k)。
(23)
在计算随机扰动量的保留概率时,本文将随机扰动方向与最速下降法的搜索方向进行比较,若二者一致则令保留概率为1,若二者不一致则按式(22)计算保留概率,不需要计算引入随机扰动后系统的输出误差,大大降低了学习训练的计算量,进一步提高系统动态响应速度。
4 仿真与实验验证
4.1 系统仿真结果分析
系统函数(System Function)简称S-函数,是Matlab提供的内置模块,可编写程序与Simulink模型进行交互仿真。本文利用S-函数构建神经网络PID控制器的仿真模型,并将采用改进L-M算法的神经网络PID控制器的动态过程与经典PID控制器、应用传统L-M算法的神经网络PID控制器进行对比,仿真结果如图10~13所示,其中,uI代表补偿前电网线电压uAB,uc代表A相补偿电压,uo代表输出端A相和B相之间的线电压。
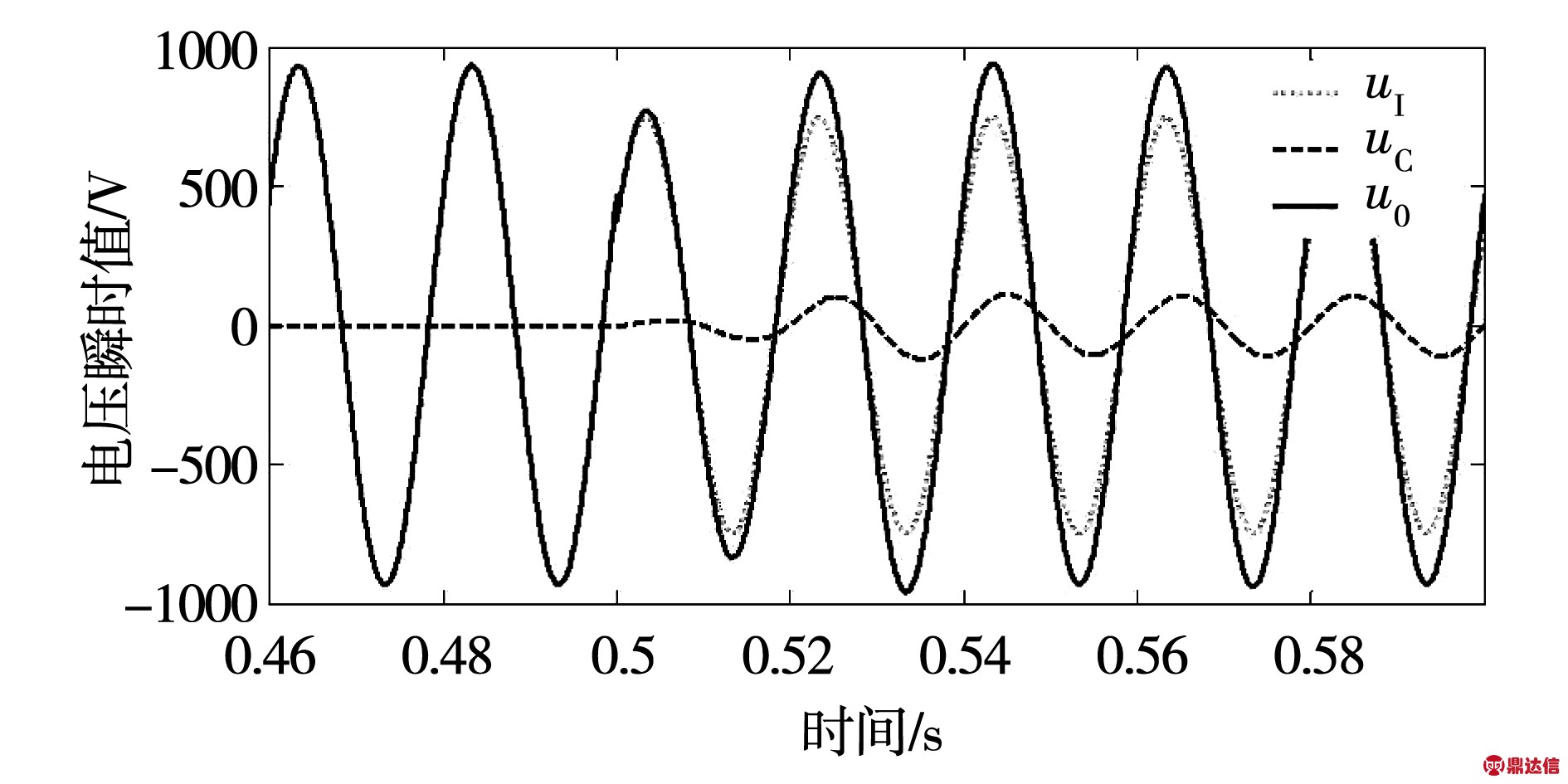
图10 电网电压跌落瞬态过程波形
Fig.10 Transient waveforms at grid voltage drop
图11 电网电压跃升瞬态过程波形
Fig.11 Transient waveforms at grid voltage rise
在t=0.46~0.5 s电网电压正常,uI幅值933 V,补偿电压为零,负载由电源直接供电。在图10中,t=0.5 s时uI幅值下降20%,uc正相补偿,滞后uI相位30°。uo与uI相位一致,其幅值经过一个周波基本恢复正常。在图11中,t=0.5 s时uI幅值增大20%,uc负相补偿,滞后-uI相位30°。uo与uI相位一致,其幅值经过一个周波基本恢复正常。
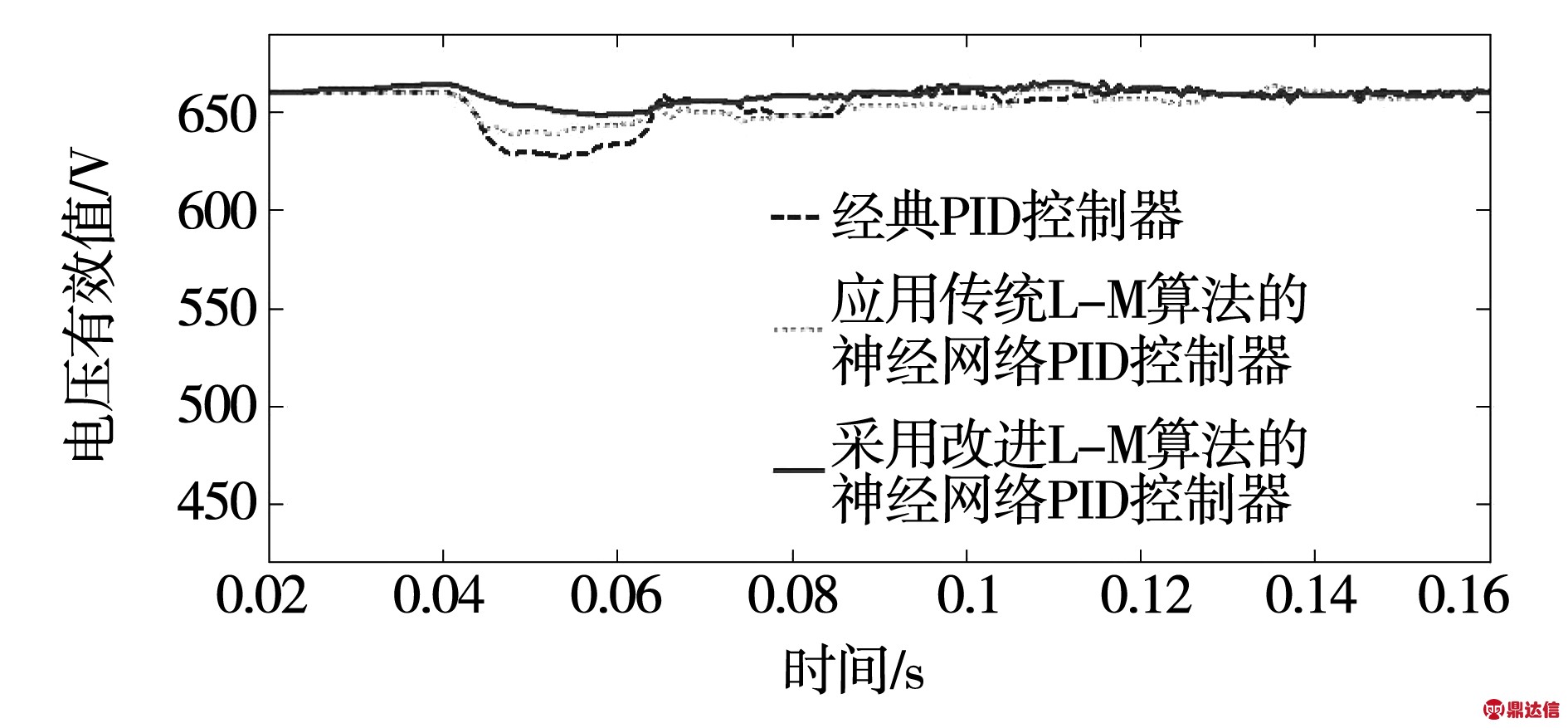
图12 电网电压跌落时输出电压有效值波形
Fig.12 Output RMS voltage waveforms at grid
voltage drop
在图12中,t=0.02~0.04 s时电网线电压有效值维持在额定值660 V;t=0.04 s时有效值跌落20%,降到528 V。在电压跌落的瞬态调节过程中,经典PID控制器和应用传统L-M算法的神经网络PID控制器得出的输出线电压有效值最大跌幅分别达到约4.9%和3.2%,而采用改进L-M算法的神经网络PID控制器的跌幅仅1.6%,仍在±2%的期望波动范围内。经典PID控制器调节时间最长,达到约3个周波,神经网络PID控制器的结果在一个周波内基本稳定。
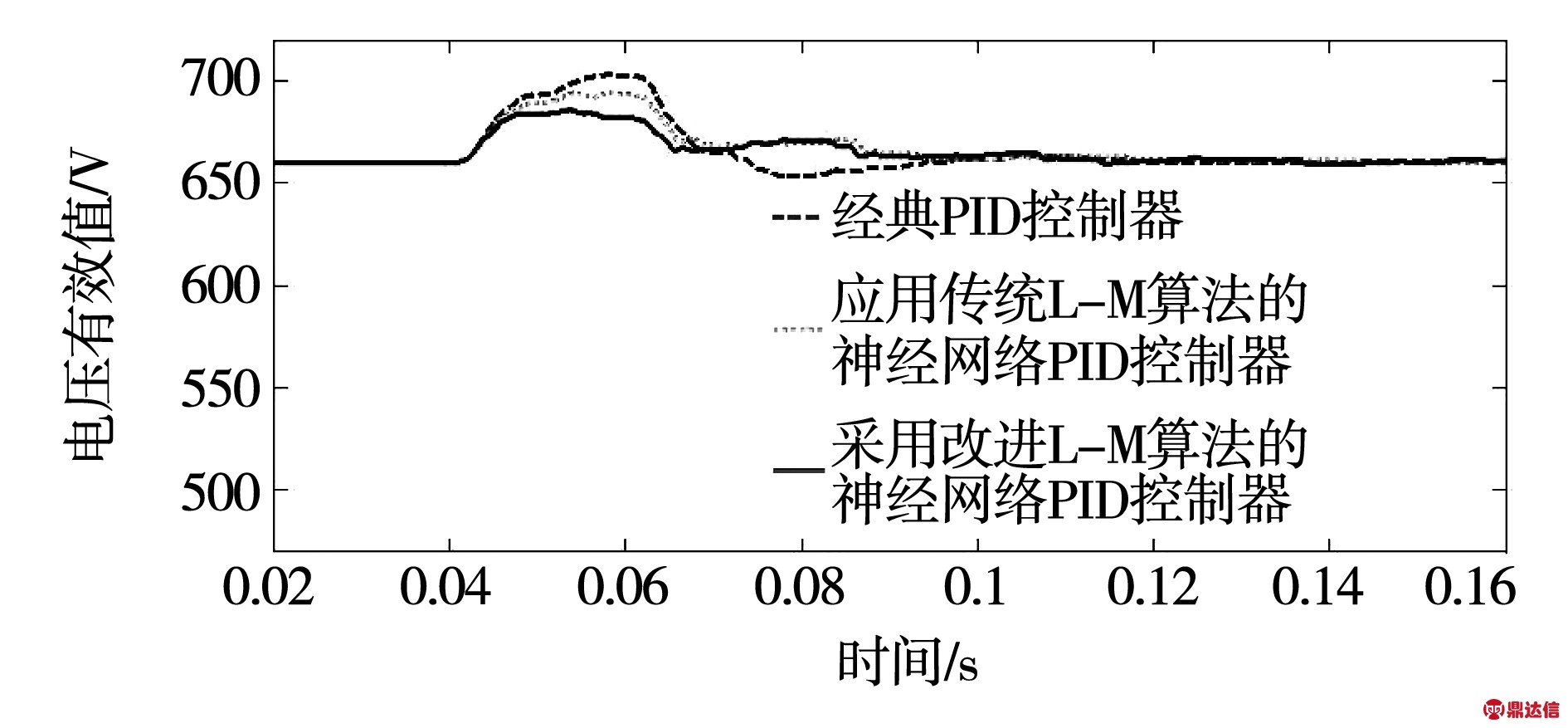
图13 电网电压跃升时输出电压有效值波形
Fig.13 Output RMS voltage waveforms at grid voltage rise
在图13中,t=0.02~0.04 s电网处于额定状态,线电压有效值为660 V;设定t=0.04 s时有效值跃升20%,达到792 V。在电压跃升的瞬态调节过程中,经典PID控制器和应用传统L-M算法的神经网络PID控制器、采用改进L-M算法的神经网络PID控制器得到的输出电压有效值最大超调分别约为6.6%、4.9%和2.4%。采用改进L-M算法的神经网络PID控制器的瞬态调节在一个工频周波内基本完成,且调节过程平滑,未出现振荡和较大的超调。
4.2 硬件平台与实验验证
为了对理论研究进行验证,本文设计和开发了一套以32位浮点型DSP芯片TMS320F28335为控制核心的实验样机。28335的主频高达150 MHz,运算速度快、存储容量大、编程简单,可实现复杂的控制算法。利用28335丰富的外设模块构建了控制系统的硬件,包括调理电路、模数转换和通信等模块。
稳压电源的基本参数:额定容量400 kVA,补偿容量80 kVA,额定电压660 V,最大可补偿电网电压幅值波动±20%,输出电压期望幅值波动小于±2%,响应时间不长于0.1 s。
三相调压器的输入接380 V电网电源,其输出通过380/660 V变压器给实验样机供电。调节三相调压器的输出电压,模拟电网电压幅值波动。样机包括功率变换器、滤波器和补偿变压器三部分,输出接负载插头,通过660/380 V变压器和空气开关接型号为Y100L2-4的3 kW感应电动机作为负载。
由于现场条件所限,难以对三种控制器进行相同工况下的对比实验,仅给出采用改进L-M算法的神经网络PID控制器的实验结果,如图14~图17所示。
图14 电网电压跌落实验稳态波形
Fig.14 Steady state waveforms at grid voltage drop test
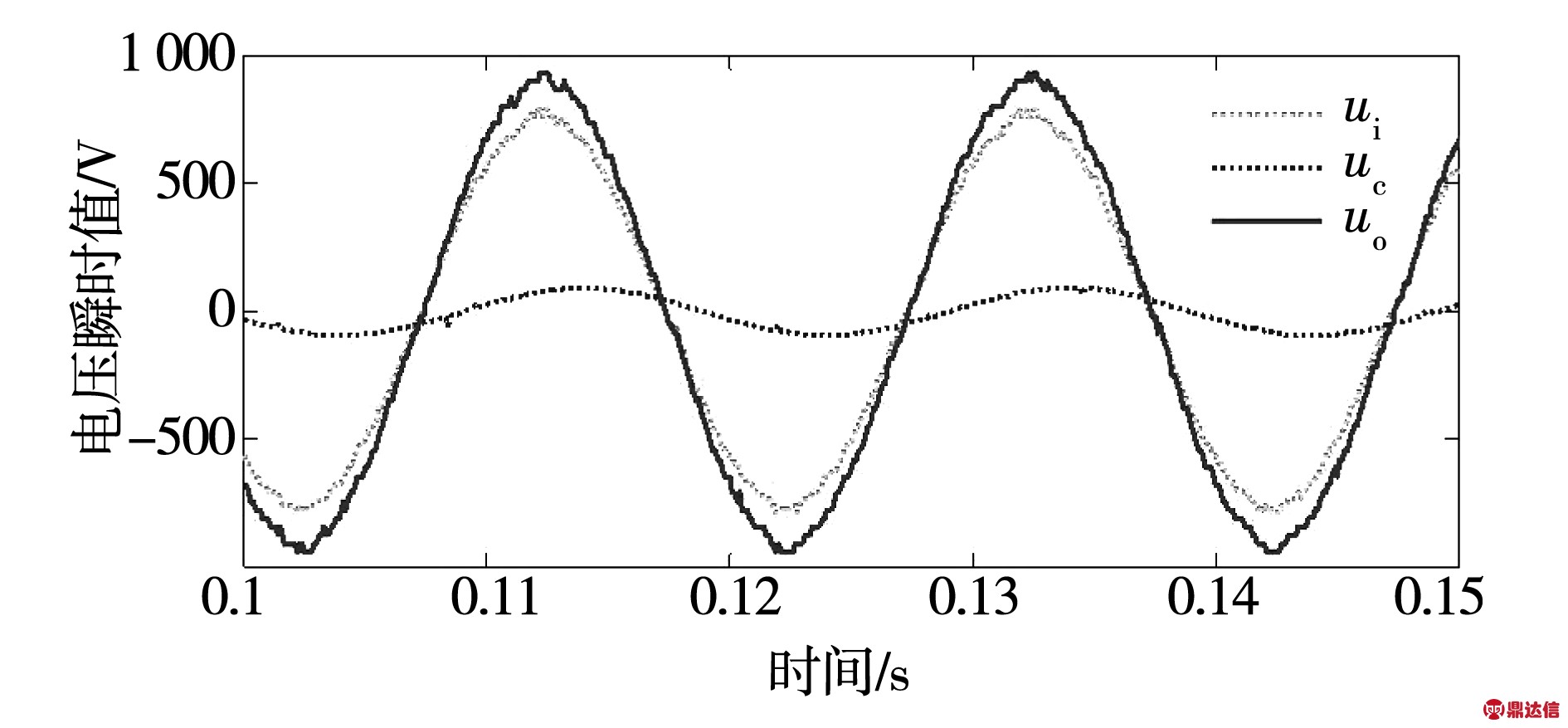
如图14所示,uI代表电网线电压uAB,处于欠压状态,幅值为774 V;uc代表A相补偿电压,有效值为65 V,相位跟踪电网A相电压同步信号,滞后uAB相位32.4°;uo代表输出端A相和B相之间的线电压,有效值为660 V。
图15 电压跃升实验稳态波形
Fig.15 Steady state waveforms at grid voltage rise test
在图15中,uI代表电网线电压uAB,电网处于过压状态,线电压幅值1 082 V;uc代表A相补偿电压,有效值为61 V,滞后-uAB相位34.2°;uo为输出端A相和B相之间的线电压,有效值为659 V。
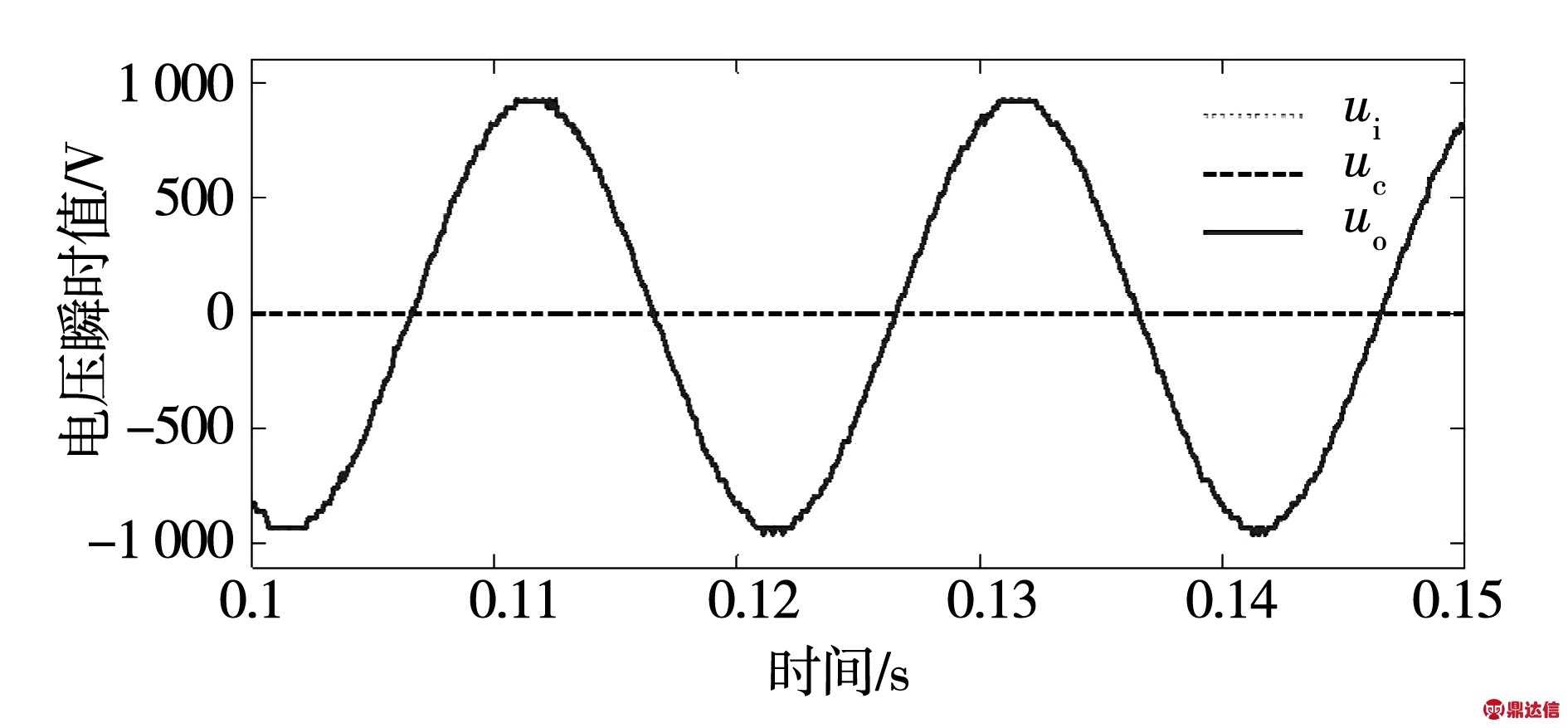
图16 电网电压幅值处于许可范围时的实验波形
Fig.16 Test waveforms when grid voltage is in normal range
在图16中,uI代表电网线电压uAB,幅值929 V,在±2%的许可波动范围内,补偿电压为零。补偿电压与输出电压的正弦度良好,波形畸变较小。
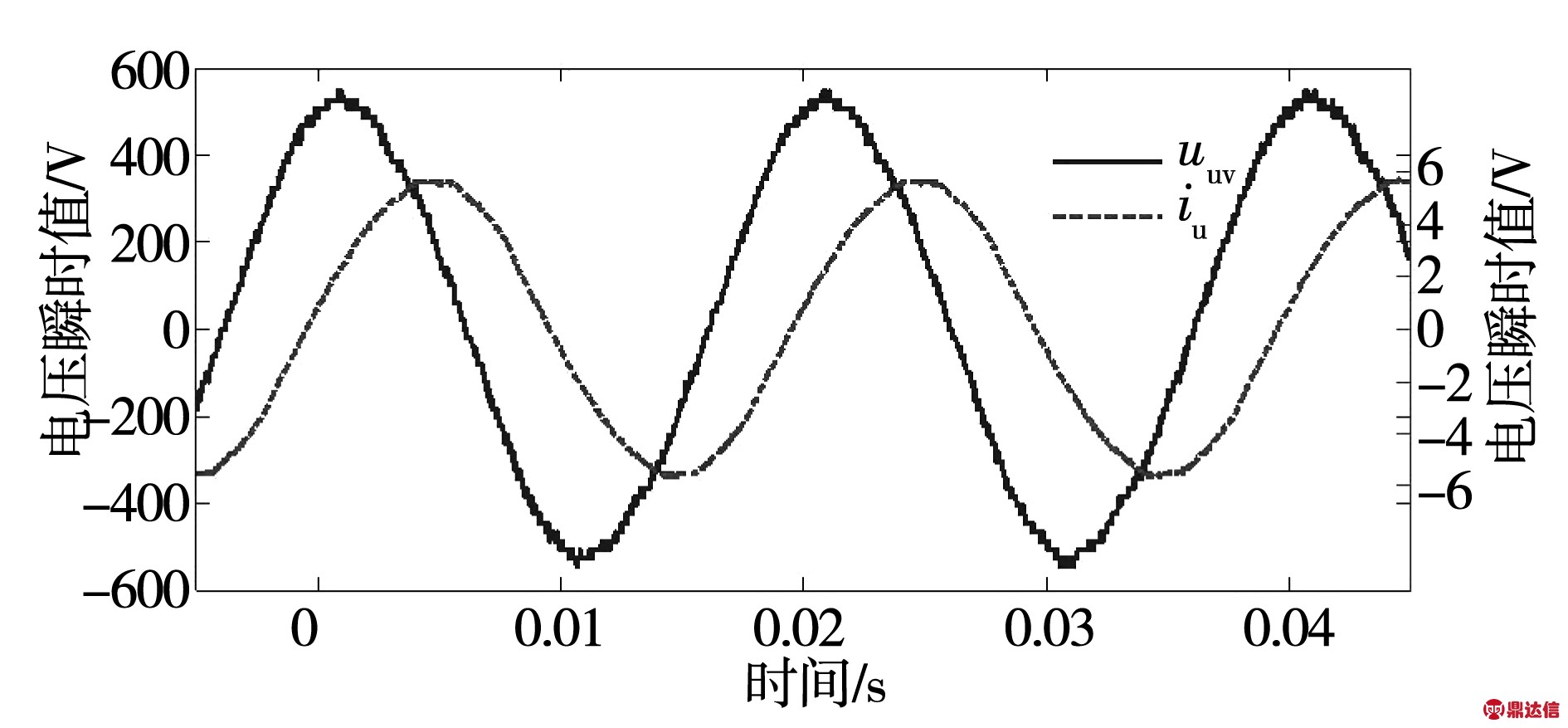
图17 感应电动机电压和电流波形
Fig.17 Induction motor voltage and current waveforms
在图17中,uuv代表感应电动机A相和B相输入端之间的线电压,有效值为383 V,iu代表感应电动机A相绕组电流,有效值为3.96 A,滞后uuv相位63°,三相绕组星型连接。
4 结 论
在供电系统的电源端与负载端之间接入交流稳压电源,通过在输入电压上叠加补偿电压,可以抵消输出电压波动,实现电源电压的稳定。本文建立了主电路各部分数学模型,并分析了各模块的工作原理和闭环稳压控制策略。针对装置表现出的时变非线性,构建了一种不依赖于被控对象精确模型的神经网络PID控制器,充分发挥了神经网络具有的非线性逼近能力和自学习能力,提高了系统的动态性能。为了加快神经网络的收敛速度,采用L-M算法对连接权值进行调整,并施加随机扰动量,加快迭代过程跳出局部最优解。仿真和实验结果证明了本文提出的控制方法取得了较好的控制效果,动态响应快,超调小,稳态精度高,鲁棒性强。


