
摘要:当今世界上先进的深水钻完井装置具有锚泊及动力定位2种方式作业能力,业内推荐做法为水深小于1 500 m都可以使用锚泊方式定位,对于动力定位方式在浅水区的适应性和风险则缺少分析。通过对动力定位方式的原理及其漂移限制进行论述,包括了浅水定位的理论限制以及规避风险的措施,提出如何设定观察圈范围及浅水作业使用动力定位方式时应考虑因素、作业风险及应对措施,除了环境及深水钻井装置应急解脱时间影响因素外,还将考虑隔水管系统极限、水下井口和结构套管强度、通讯系统、定位传感器系统等影响因素,应对措施包括井口设备选择、隔水管系统分析、人员交流培训和使用者和承包商协议等,对浅水区使用定位方式作业有一定的指导意义。
关键词:深水;动力定位;风险;观察圈;应急解脱
进入21世纪,各大油公司开始进入超深水(作业水深大于1 500 m)区域,先进的第五代、第六代大型深水钻井装置逐渐进入人们的视野,其超强的环境适应能力可以在遍布全球海域3 000 m甚至3 500 m水深以内的任何地方作业[1-3]。从经济性方面考虑,业内推荐在水深1 500 m范围内使用锚泊定位方式进行作业,但从机动性方面考虑,先进的第五、六代深水钻井装置可以高效移动至浅水勘探地区,节约了远程作业时间和建井成本,浅水区作业者通常也会选用动力定位方式[4]。动力定位平台在浅水区作业存在风险,作业者需与钻井承包商建立浅水区动力定位系统安全操作机制。
1 动力定位基本原理
动力定位系统是一种闭环的控制系统,其采用推力器来提供抵抗风、浪、流等作用在船上的环境力,从而使船尽可能地保持在海平面上要求的位置上,其定位成本不会随着水深增加而增加,并且操作也比较方便。动力定位系统的组成包括3个分系统:动力系统、推力器系统和动力定位控制系统,基本原理是利用计算机对采集来的环境参数(风、浪、流),根据位置参照系统提供的位置,自动地进行计算,控制各推力器的推力大小,使船舶保持艏向和船位的固定。当采用动力定位的深水钻井装置遭遇到强的环境影响力及动力定位3个系统中某一系统的失效,或者人为原因的操作失误就会导致钻井装置的漂移,给作业带来极大的风险。
2 深水钻井动力定位装置漂移极限
深水钻井动力定位装置发生漂移由海洋环境或自身设备情况引起,出现强大的自然力或平台断电、推进器和动力定位系统失效时,平台将会发生失控漂移。大的漂移范围将对钻井作业带来防喷器组和张力器系统损坏、无法解脱井口、井口损坏和油井失控等安全风险。钻井作业时通过在以井位为中心设定多组漂移范围警戒圈来指导平台动力定位作业,在安全操作范围内对浅水、深水井完成相同警戒级别的反应时间使用的方法是相同的,这种计算根据钻井装置在普通环境下的漂移速度及漂移过程设备承载、应急解脱反应时间等确定钻井装置必须安全解脱条件,以此反推各阶段的反应时间和相对各阶段漂移距离。
早在1974年,Sedco 445深水钻井动力定位装置在600 m水深进行作业时,对装置漂移设定了3个阶段。第1阶段边界设定装置漂移范围为水深的3.0%,黄圈表明动力定位已失去部分保持位置的能力,非常可能需要解脱操作;第2阶段边界设定装置漂移范围为水深的5.0%,红圈表明隔水管角度不能保持正常操作范围,需要立即采取解脱作业,以避免人员受伤及对设备环境的损坏;第3阶段边界设定装置漂移范围为水深的8.7%,蓝圈表明装置在此处须完成解脱作业,如果在此处不能完成解脱作业,将会造成隔水管挠性接头、伸缩节和张力器等设备损坏。该以水深为计算依据的方法一直延续到1995年,后来作业者开始逐渐考虑更多的限制因素。
3 隔水管-水下井口系统的偏移限制
深水钻井装置通过隔水管系统与水下井口连接,隔水管-水下井口系统的受力和变形会对深水钻井装置的漂移产生限制,在确定漂移极限(断开点,POD)时,需要隔水管系统的一些参数,这些参数可以用于预测不同波浪流下的系统响应情况。影响漂移极限的典型限制参数包括隔水管伸缩节和张力器冲程、隔水管上部和下部挠性接头转角、井口头和结构套管抗弯能力。合适的井口和结构套管可以允许隔水管-井口系统的断开点发生足够大的偏移。钻井承包商和服务商应通力合作,确保选择的井口和结构套管能满足在设计最差工况下的强度和弯矩校核。在设计计算整个隔水管-水下井口系统时考虑基础设定很重要,例如分析结构套管时可采用考虑土壤反应或底部固定的方法,当采用考虑土壤反应的方法时,下部挠性接头角度会有明确降低,深水钻井装置漂移范围减小。此外,分析时采用的是时间多域法还是准静态方法对结果的产生也很重要,时间区域计算表明隔水管顶部的非线性响应(角度和失效)不能用准静态分析方法求得。因此,在浅水的动力定位钻井时解释清楚以上因素非常重要。
4 浅水环境下漂移分析
漂移分析包括平台漂移范围和时间。图1给出了一个动力定位钻井装置原理上的案例:图1(a)提供了现在的环境方向和深水钻井装置运动朝向,通过三轴坐标中时间区间程序去衡量深水钻井装置的偏离量和漂移速率用以计算其漂移路线。在图1中,注意到起始点是“上环境”方,钻机将会在漂移过程返回到井位正上方。图1(b)是一个把图1(a)用时间对比于相对井位正中心和定点半径范围位移的二维表示。隔水管系统的偏斜极限10.8%,偏离量(相对于井位正中心),和在动态漂移过程的180 s。减去应急解脱反应时间45 s,剩余接触红警线的时间为135 s对应的隔水管系统偏斜为6.8%。由于环境方向和强度变化,范围可以被改变以适应新的情况和确认各层次的反应时间。
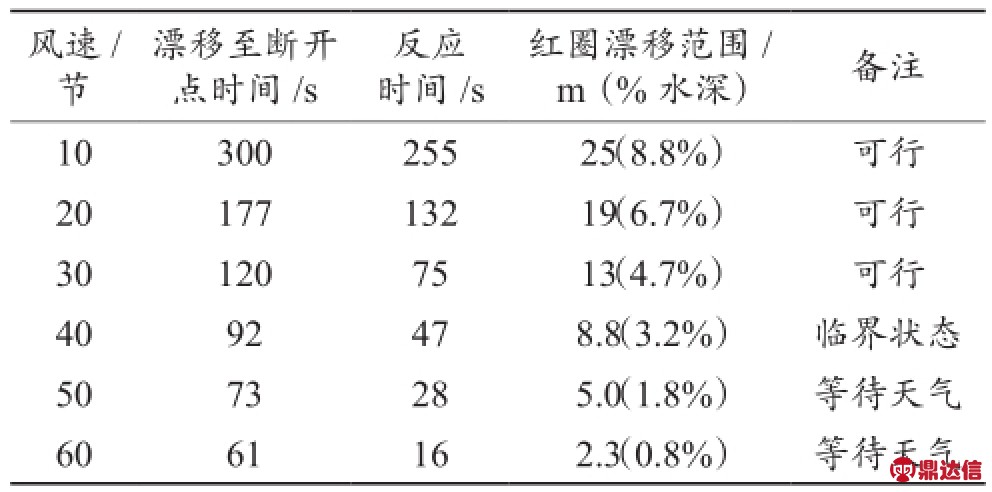
表1给出了一个计算警示圈和反应时间与环境的增量对比的例子,这个例子说明增加风速时,相关联的反应时间的降低。如果要求的应急反应时间为60 s,那么当风速达到大约当前环境风速为35节时,不适合继续进行作业,应尽快做好应急解脱准备工作。作业区域的风速、风向变化范围及年度最大概率性风速须作为设计考虑依据。

图1 深水钻井动力定位装置漂移分析图
表1 平台漂移反应时间与风速的关系对比表
5 浅水钻井作业风险及应对措施
5.1 存在的风险
(1)应急反应时间不够。相对于深水井位,水深较浅的井位同样的下部挠性接头偏移角度,船位允许偏移量将减少;漂移限制中对应的绿圈、黄圈、红圈相对减小,预解脱和解脱的反应及采取相应措施可支配的时间都相应减少。如海洋石油981平台在白云某水深小于700 m的井位作业时,经计算得到的应急反应时间为49 s,也就是准备解脱的时间只有49 s可支配。这在一些作业工况下反应时间就不够,比如下部钻具过防喷器期间、下套管期间等。
(2)增加了应急解脱的几率,使得复杂情况变得不可预测,增加了作业难度,无形中加大了队伍的操作压力,也是潜在的危险源。
(3)作业过程中也增加了扰性接头和隔水管磨损的概率。大尺寸井下工具如回收抗磨补心工具、套管头等通过防喷器可能损坏防喷器及井下工具。
(4)应急解脱属于极端情况下的操作,可以保护井口、实现对井的控制,但是对设备的损坏程度都是无法预估的。
5.2 应对措施
(1)获取准确的应急反应时间。深水动力定位钻井装置在新井位作业时,需要模拟不同的作业工况和海洋环境条件下的应急反应时间 ,并对比钻井装置在钻进、下套管和下防喷器组等作业工况下所需的应急解脱时间,以确定水深能否满足深水钻井装置的安全作业要求;(2)设备选择及系统测试。选用合适的结构套管,保证具有足够的强度和抗弯能力,若套管强度太弱,最大偏移量将会减少,同时产生一个限制性的警戒区,由于缺乏足够的时间拆卸而导致作业暂停,增加了与天气相关的停机时间。对套管和对井口系统进行核查,确保满足详细的隔水管分析。动力系统系统应该进行彻底地检查。建立一个差分全球定位系统天线,以确保吊车工作时不会有信号遮蔽。确保声学定位系统的安装和运作期间的精度;(3)建立动力定位安全操作规程。深水动力定位钻井装置开始作业前,作业者和装置使用者之间建立动力定位安全操作规程。动力定位安全操作规程须明确在平台漂移范围到达限值、失去动力、断电和失去通讯联络等多种情况下的应急操作方案。
6 结论
深水动力定位钻井装置由于其良好的机动性和环境适应能力,在某些特定浅水钻井项目中也得到了应用。为有效克服浅水区水深对动力定位装置漂移范围和时间的限制,需要对隔水管-水下井口系统进行合理设计,以满足在最恶劣工况下水下井口和结构套管的强度和抗弯能力要求。此外,获取准确的应急反应时间、合适的设备选择及钻前系统测试和建立动力定位安全操作规程被证明能有效降低深水动力定位钻井装置在浅水区作业的风险。


