
摘要:随着可穿戴柔性电子技术的发展, 高灵敏度和宽感应范围的柔性力敏传感器的需求量逐渐增大, 如何选择兼具高导电性和良好柔性的材料作为传感器的敏感材料是获得高性能传感器的关键。近年来, MXene材料因其导电性好、柔韧性高、亲水性好以及合成可控等优点成为一种极具潜力的导电敏感材料。本文就MXene基柔性力敏传感器的类型、敏感材料的微结构设计方式、传感性能及传感机理等方面的研究进展进行了阐述和总结。
关 键 词: MXenes; 柔性力敏传感器; 材料微结构设计; 多相复合; 综述
近年来, 随着柔性电子学的发展, 可穿戴电子设备逐渐吸引了国内外的广泛关注, 其中, 柔性力敏传感器作为可穿戴电子设备的核心器件, 在医学监测治疗、运动健身、通信娱乐和航空航天等领域均有着巨大的应用前景[1-6]。柔性力敏传感器可将器件承受的力转换成电信号输出, 将其贴敷到人体皮肤上或者组装到衣物表面, 可以实时感应和监测人体的各项活动信息[7]。按照信号转换机理可以将柔性力敏传感器分为电阻式、电容式和压电式[3,8]。其中, 电阻式力敏传感器因其结构简单、成本低、集成以及信号采集相对容易等特点而备受关注, 其基本工作原理是通过对传感器施加外力使柔性传感器发生形变, 导电通路同时发生变化, 从而导致电阻值发生变化[9-11]。根据承受力的信号的不同, 又可以将电阻式传感器分为应变式和压阻式, 分别对应于拉力和压力信号。一个理想的电阻式柔性传感器需要具备高灵敏度(通常用Gauge Factor (GF)表示, 即相对电阻变化与应变变化(或压强)的比值来表示)、宽的感应范围、极短的响应时间、极低的检测限以及良好的线性度和循环稳定性等优异的性能[12-14]。其中, 灵敏度和感应范围是衡量传感器性能优劣最关键的两个参数。为了获得高的灵敏度, 要求传感器在极小的形变下发生显著的结构变化, 从而引起导电网络发生大的变化, 传递出变化明显的电阻信号; 而获得宽的感应范围则要求传感器在很大的形变下仍保持导电结构的连通性[15-16]。通常这二者互为矛盾, 难以兼顾。因而, 制备兼具高灵敏度和宽感应范围的柔性力敏传感器是该领域重要的研究方向之一。
电阻式柔性传感器通常由柔性衬底和导电材料两部分构成。为了兼顾传感器的灵敏度和感应范围, 通常有两种制备策略, 分别是从衬底和导电材料入手。第一种策略是采用特殊的传感器构型, 目前用于传感器柔性衬底的通常有聚二甲基硅氧烷(PDMS), 氢化苯乙烯–丁二烯嵌段共聚物(SEBS)和硅橡胶(Ecoflex, Dragon skin)等高弹性高分子材料[17-20]。利用柔性材料延展性好, 硬度低等特点, 通过预聚合、预拉伸、激光刻蚀等技术在器件结构中引入网格、螺旋结构或仿生结构等特殊的构型设计[21-25], 能够提高传感器的综合性能。但是构型设计的复杂化对制作工艺提出了更高的要求, 而且耗时耗力, 很难实现大面积制备, 极大地限制了柔性传感器的批量化研制。另一种策略是选择新型的导电敏感材料, 利用材料自身的微结构来使传感器获得高性能, 这要求材料本身具有良好的导电性和柔性。目前, 常用的柔性力敏传感器敏感材料有金属材料(金属颗粒, 金属纳米线以及金属纳米片)和碳材料(碳黑, 碳纳米管以及石墨烯)等[9,26-31]。然而, 基于单一形貌敏感材料的柔性传感器通常由于自身结构的限制无法兼具高灵敏度和宽感应范围。例如, 零维材料如金属颗粒等由于它们短的长径比, 受力时容易彼此分离而无法具有很大的感应范围[26]; 而银纳米线, 碳纳米管等一维材料制备的传感器则通常具有很宽的响应范围, 其灵敏度却很低, 这主要是因为它们自身的高长径比使纳米线之间容易相互缠绕, 即使在大形变下电阻变化也并不明显[32-33]。对于二维材料, 由于相邻片层之间的紧密堆叠和相互作用, 受力时无法产生有效滑移, 容易产生大裂纹切断导电通路, 导致传感器通常只能在很窄的感应范围内具有很高的灵敏度[14,34]。由此可见, 敏感材料的微结构设计和形貌调控是影响传感器性能至关重要的因素, 如何寻找一种适合的、形貌结构可调控的材料是其中的关键。
MXenes, 即二维过渡金属碳化物或碳氮化物, 是一种类石墨烯的新型层状二维晶体材料, 其化学式为Mn+1Xn, n = 1、2、3, M 为早期过渡金属元素, X为碳或/和氮元素, 常见的有Ti3C2、Ti2C、Ta4C3、(Ti0.5, Nb0.5)2C、(V0.5, Cr0.5)3C2、Ti3CN等[35-40]。MXenes通常是通过强酸或强碱选择性刻蚀三维层状化合物MAX相(化学式为Mn+1AXn, 其中M、X、n 与上述一样, A 为主族元素, 最常见的为Al, Si)陶瓷的A原子层制备得到的[41-44]。2011 年, Naguib 和Barsoum 等[35]利用氢氟酸(HF)选择性刻蚀掉Ti3AlC2中的Al原子层得到了Ti3C2, 成功制备了第一种MXene材料。MXenes具有很多优异的特性, 如与石墨烯相媲美的导电性和弯曲强度, 以及优于石墨烯的抗氧化性和耐电子辐照能力[45-47]。此外, 化学液相刻蚀法制备的MXene表面通常带有–OH, –F, –O等基团, 具有很强的亲水性且易于进行化学修饰, 被广泛应用于储能[43,48-51]、催化[40,52]及电磁屏蔽[53-54]等领域。同时, MXene材料具有优良的导电性和机械柔性, 完全符合柔性力敏传感器对导电敏感材料的要求, 因而MXenes在柔性电子领域也逐渐受到了越来越多的关注。
1 MXene基柔性应变传感器
柔性应变传感器是将器件的拉伸应变变化转变成电阻信号输出, 从而用于监测引起应变的应力信号(灵敏度GF=(ΔR/R0)/ε, 其中R0为传感器的初始电阻, ΔR=R–R0, 表示传感器在一定应变下的电阻与初始电阻的差值, ε为拉伸应变)。MXenes作为二维材料, 在将其用作传感器的敏感材料时, 同样存在其拉伸过程中因相邻片层紧密堆叠而无法实现有效滑移的情况, 导致传感器的导电网络迅速被破坏而无法获得较宽的感应范围。为了克服这个问题, 通常通过在MXene材料中加入第二相或者对MXenes自身的形貌进行调控的方式来实现。
1.1 基于MXene/复合物的柔性应变传感器
基于二维材料的导电网络通常由二维片层紧密堆叠而成, 相邻片层之间还可能存在范德华力等相互作用力, 因而在外部应力作用下片层通常无法实现有效滑移而只能通过产生容易阻断导电通路的大裂纹来分散应力, 对导电网络破坏较大, 极大地限制了传感器感应范围的扩大和稳定性的提高。在二维材料中加入不同维度的第二相或者第n相材料来减弱二维材料片层之间的相互作用并构建新的导电网络是常用的方法。2017年, Dong等[55]通过逐层喷涂技术将Ti3C2Tx(T表示T3C2的表面端基, x表示端基的数量)片层和一维材料单壁碳纳米管(SWCNTs)复合构建了一个三明治结构的Ti3C2Tx/CNT导电敏感层。如图1所示, 在Ti3C2Tx/CNT三明治结构中, Ti3C2Tx片层呈有序堆叠状态, 高长径比的CNTs无序地分布在Ti3C2Tx片层之间, 将片层编织起来共同构成一个完整的导电网络。基于该复合结构的柔性应变传感器在0~30%应变范围内的灵敏度可以达到64.6, 在40%~70%范围内可以达到772.60, 其应变感应范围可以通过控制Ti3C2Tx和CNTs的浓度和喷涂层数在30%~130%之间进行调控, 检测限低至0.1%, 并且传感器还具有优异的循环稳定性, 在20%的应变下循环5×103次后电信号几乎无衰减。通过观察Ti3C2Tx/CNT基传感器的导电层在一个完整拉伸–释放过程中的形貌变化(如图 2)可以发现, 该传感器的传感机理与常见的基于二维材料(如石墨烯, 金属纳米片)的传感器相似, 同样符合裂纹扩展机制, 随着拉伸应变的增大, 导电敏感层通过裂纹的产生和扩展来实现高度灵敏的刺激–响应过程, 而CNTs的存在连接了裂纹的两端, 保证了导电通路在很宽的应变范围内能够保持连通, 使传感器在获得高灵敏度的同时获得较宽的感应范围。
2018年, Chen等[56]在Ti3C2Tx中除了加入一维材料银纳米线(AgNWs)来提高材料的导电性和机械性能外, 还添加了多巴胺(PDA)和镍离子(Ni2+)共同构筑了一个仿珍珠层的“brick-mortar”结构(如图3)。其中Ti3C2Tx片层和AgNWs作为“砖块”赋予了整个复合体系很高的导电性和机械脆性, 而PDA/Ni2+作为“泥浆”通过各种界面相互作用将“砖块”连接起来。在这个仿珍珠层结构中, PDA相当于贝壳的蛋白质粘结剂, 其邻二苯酚和胺基官能团可以与Ti3C2Tx的–F和–OH端基形成氢键, 而NiCl2可以作为渗入有机基质的矿物质桥连剂, Ni2+与PDA和Ti3C2Tx之间存在螯合作用, 两者都对增强复合体系的机械强度起到了很大的作用。此外, PDA/Ni2+的存在有效地减小了Ti3C2Tx片层之间的摩擦力, 能够促进片层的有效滑移, 再加上PDA分子链自身的拉伸性, 使体系中的各基元发挥了很强的协同增强作用。基于Ti3C2Tx-AgNW-PDA/Ni2+复合结构的柔性应变传感器在0~15%、15%~35%、35%~60%、60%~77%和77%~83%应变范围内的灵敏度分别为256.1、433.3、1160.8、2209.1和8767.4, 最大感应范围超过了50%并且在整个范围内灵敏度均高于200, 超过了大多数目前已报道的柔性应变传感器。此外, 该传感器还具有良好的循环稳定性, 在60%的应变下循环5000次后电信号依然很稳定。由此可见, 在拉伸过程中, Ti3C2Tx、AgNWs、PDA和Ni2+之间存在着良好的相互协同作用, 赋予了传感器优异的综合传感性能。
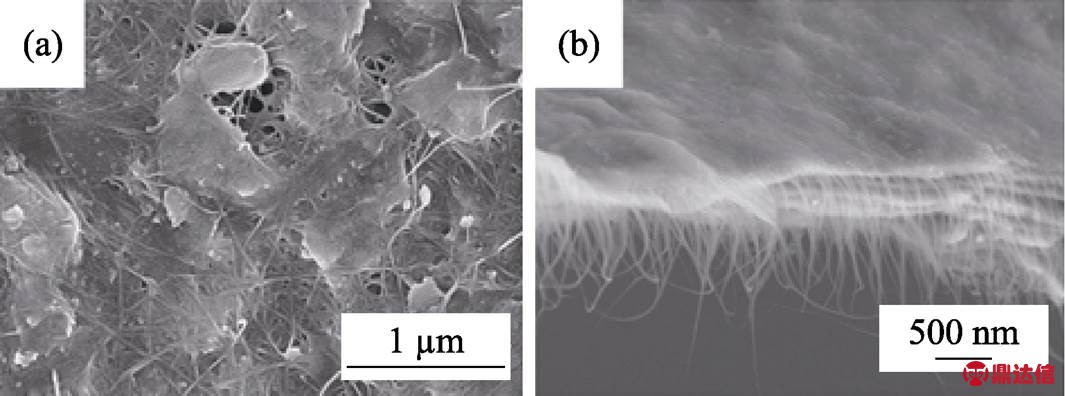
图1 Ti3C2Tx/CNT导电层的扫描电镜照片[55]
Fig. 1 SEM images of sandwich-like Ti3C2Tx/CNT layers[55]
(a) Top-view; (b) Cross-sectional
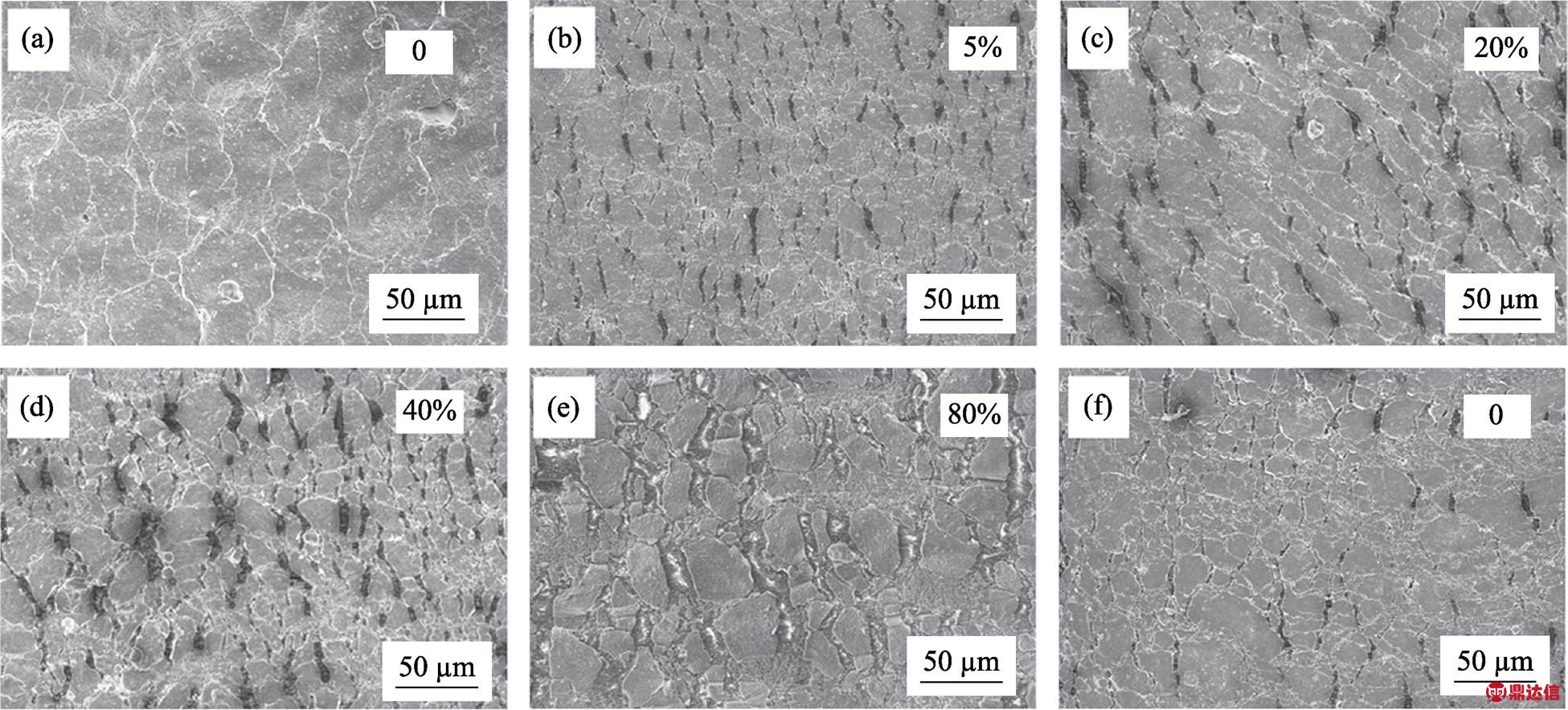
图2 Ti3C2Tx/CNT导电层在一个拉伸–释放循环中处于不同应变状态下的扫描电镜照片[55]
Fig. 2 Surface SEM images of the Ti3C2Tx/CNT film at various stretching states during the first strain−release cycle[55]
(a) 0; (b) 5%; (c) 20%; (d) 40%; (e) 80%; (f) Back to 0
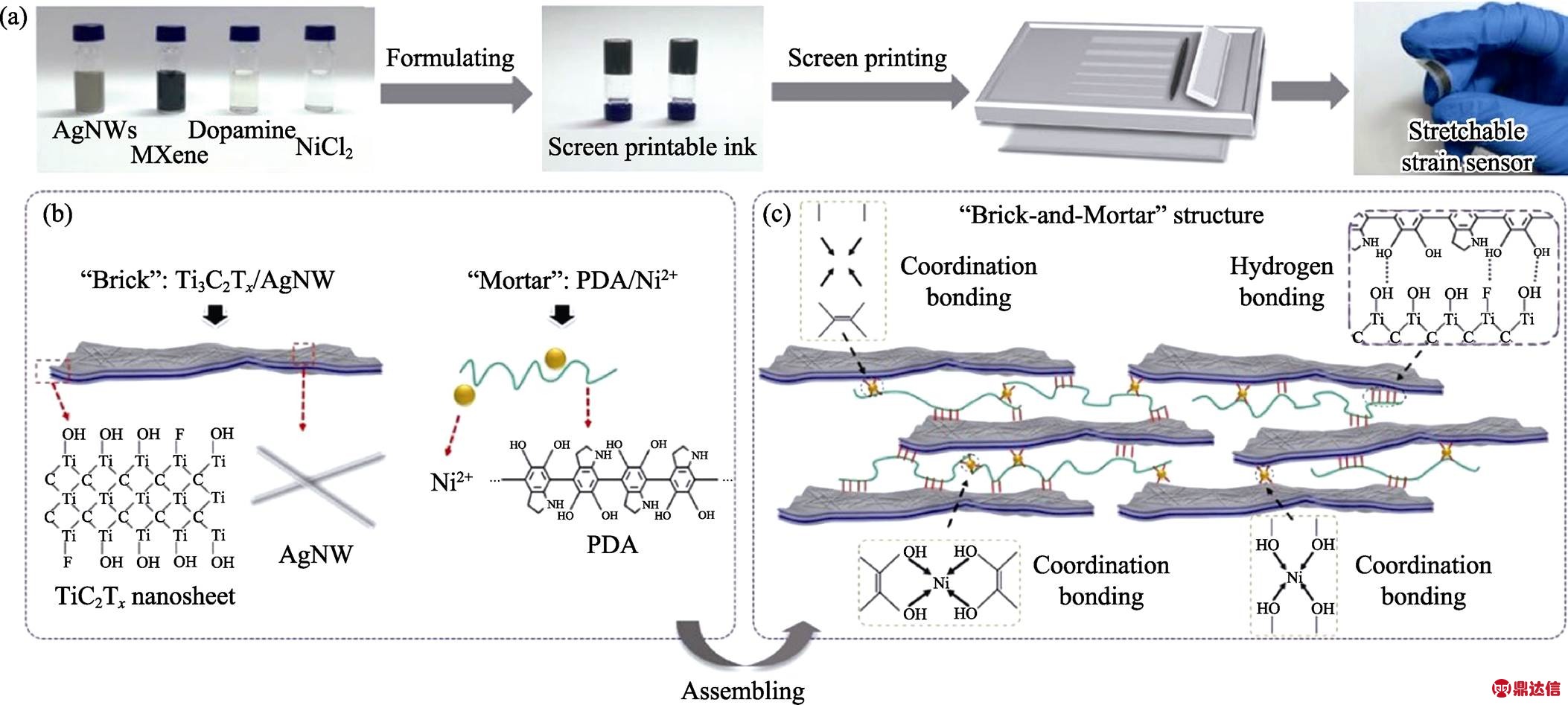
图3 (a)Ti3C2Tx-AgNW-PDA/Ni2+基柔性应变传感器的制作流程图; (b) “brick”材料(Ti3C2Tx和AgNWs)和“mortar”材料(PDA/Ni2+)的结构示意图; (c)Ti3C2Tx-AgNW-PDA/Ni2+复合结构的示意图[56]
Fig. 3 (a) Schematic of the fabrication process for the bioinspired Ti3C2Tx-AgNW-PDA/Ni2+ sensor fabricated through the screen-printing method; (b) Schematic illustration of the structures for the “brick” materials (Ti3C2Tx and AgNWs) and “mortar” material (PDA/Ni2+); (c) Schematic illustration of the Ti3C2Tx-AgNW-PDA/Ni2+ sensor based on the “brick-and-mortar” architecture[56]
由于MXenes具有很好的亲水性, 通过直接滴涂或者旋涂的方式将MXenes负载到疏水的衬底上通常会导致导电薄膜膜厚不均匀等问题。Hyosung等[57]将MXene与PDAC(聚二烯丙基二甲基氯化铵)层层自组装形成复合薄膜, 该薄膜导电率可达到2×103 S/m, 并能够均匀地负载到硅片、PDMS、聚对苯二甲酸乙二醇酯(PET)、氧化铟锡(ITO)玻璃等衬底上。将该MXene/PDAC复合膜负载到PDMS上制成应变传感器, 应变可以拉伸到40%, 将该复合膜负载到PET上制成弯曲传感器, 弯曲角度可以达到35°, 灵敏度约11.5, 两种传感器均可以循环到2×103次以上, 具有良好的稳定性。
除了上述常见的将导电材料直接负载到柔性衬底表面的柔性应变传感器, 水凝胶因其自身优良的可拉伸性和自修复能力也常被用于柔性应变传感器敏感材料的弹性载体, 而这种情况下导电材料通常进入水凝胶内部与其复合形成导电水凝胶。Alshareef等[58]将Ti3C2Tx与聚乙烯醇(PVA)水凝胶复合形成导电的MXene基水凝胶(M-hydrogel)。由于Ti3C2Tx的表面端基与PVA水凝胶之间发生了二次交联, 因而该水凝胶的可拉伸性高达3400%, 远高于纯PVA水凝胶(2200%), 并且具有良好的自修复能力。如图4所示, 将MXene基水凝胶制作成柔性应变传感器, 当受到拉伸应变时, 随着MXene含量的逐渐增加(0~4.1wt%), 传感器的灵敏度从2增大至25; 当受到压缩应变时, 传感器在0~0.5%和0.5%~3.0%的应变范围内灵敏度分别为60~80和21, 与已报道的水凝胶型传感器相比性能较为优异。该传感器的工作机理主要是通过施加外力时水凝胶形变引起Ti3C2Tx片层之间的接触电阻发生改变来实现力学到电学的信号转变。
综上所述, 在MXene材料中添加其他材料来构建新的导电网络结构, 结合各材料的特性实现复合体系中材料之间的协同最大化是一种十分有效的制备兼具高灵敏度和宽感应范围的柔性应变传感器的途径。
1.2 基于纯MXene的柔性应变传感器
除了掺杂其它相材料外, 通过对MXene材料进行形貌调控构建新型的微结构也是一种有效的方法。Sun等[15]采用常见的化学液相刻蚀法制备Ti3C2Tx材料, 通过调控刻蚀过程中的刻蚀剂(氢氟酸(HF)和四甲基氢氧化铵(TMAOH))、刻蚀时间(6, 18和24 h)和超声过程中的超声时间(20 min, 1~4 h), 对Ti3C2Tx的形貌进行了有效地调控, 制备得到了三种形貌差异较大的Ti3C2Tx材料, 分别是以Ti3C2Tx纳米颗粒为主的HF6h-d3h-Ti3C2Tx, 以Ti3C2Tx纳米片为主的TMA-Ti3C2Tx和以Ti3C2Tx纳米颗粒–纳米片混合网络结构为主的HF18h-d20min- Ti3C2Tx。其中, Ti3C2Tx纳米颗粒–纳米片混合网络结构可以实现最大化协同效应的, 基于该结构的柔性应变传感器具有很优异的综合性能, 在0~5%, 5%~ 35%和35%~53%的应变范围内灵敏度分别高达178.4, 505.1和1176.7, 其最大感应范围为53%, 满足了人体全身范围内各项活动对传感器的要求, 检测限低至0.025%, 循环5×103次仍能保持很好的稳定性。图5展示了基于Ti3C2Tx纳米颗粒–纳米片混合网络结构的柔性应变传感器的工作原理。在小应变范围内, Ti3C2Tx不规则颗粒通过无规运动产生孔洞, 使传感器在该范围内灵敏度就达到了100以上, 之后随着应变增加, 导电薄膜通过产生微裂纹以及片层撕裂来进一步提高灵敏度, 而同时片层通过包裹颗粒形成导电簇来抑制裂纹的扩展并连接导电通路, 使传感器具有较大的感应范围。因而, 不规则Ti3C2Tx颗粒和纳米片的协同作用和片层的抑制裂纹扩展作用赋予了传感器优异的性能。
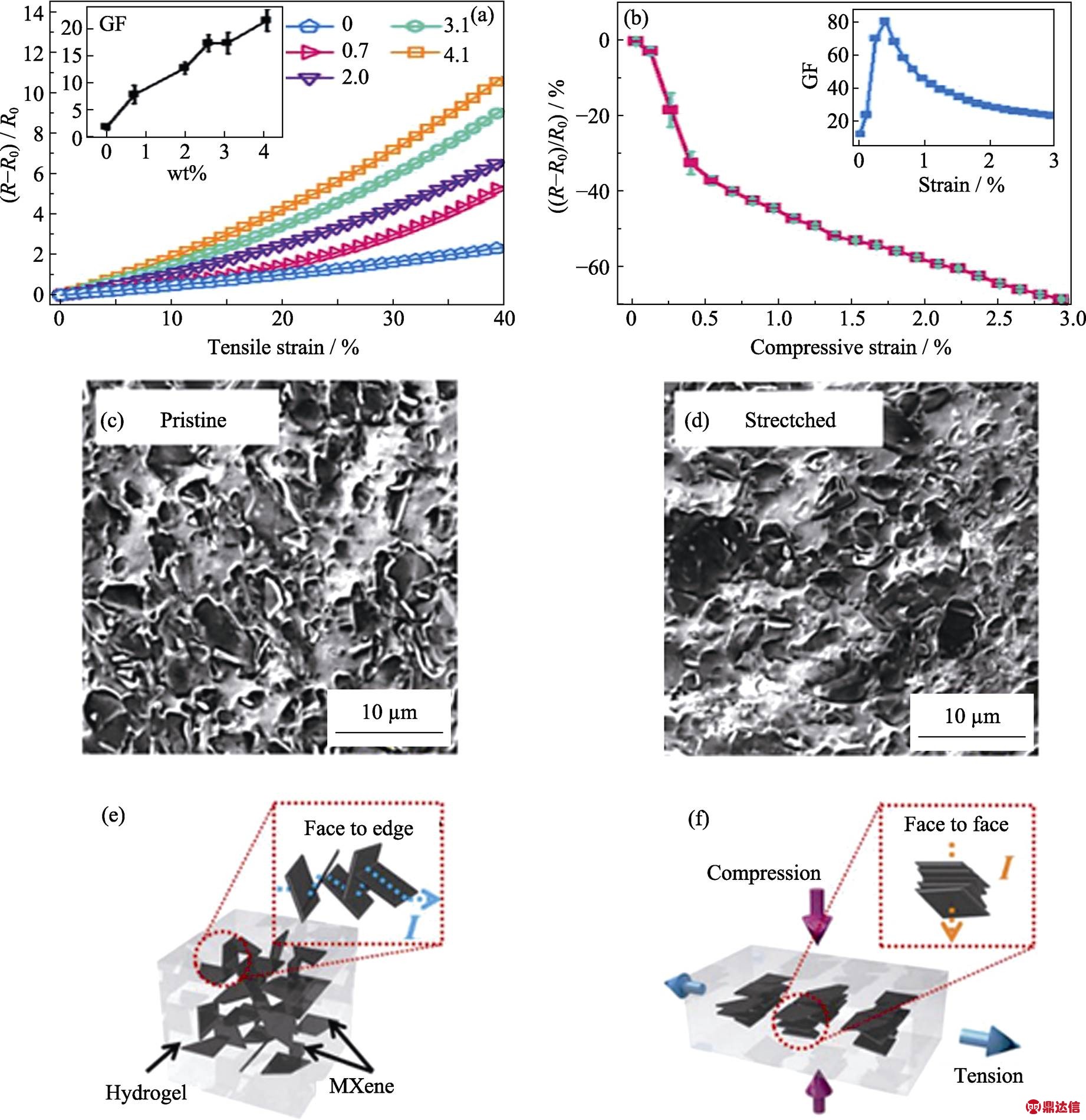
图4 MXene基水凝胶传感器在(a)拉伸应变和(b)压缩应变下的电学响应; (c)拉伸前和(d)拉伸后MXene基水凝胶表面的扫描电镜照片; (e~f)MXene基水凝胶的机电响应原理图[58]
Fig. 4 Electromechanical properties of M-hydrogel composite and mechanisms Electrical response of M-hydrogel to (a) tensile strain and (b) compressive strain, with insets showing the corresponding GFs; Scanning electron microscopy (SEM) images of M-hydrogel surface (c) before and (d) after stretching; (e-f) Schematic illustration for the mechanism of the electromechanical responses from M-hydrogel[58]
2 MXene基柔性压阻传感器
柔性压阻传感器是器件在受到压力时通过形变将压力信号转换成电阻信号进行输出的传感器, 其灵敏度GF=(ΔR/R0)/P, 其中P表示压强, 灵敏度单位通常用kPa–1表示。手风琴形状的多层MXene和二维的MXene单片层都曾被用于柔性压阻传感器的敏感材料。
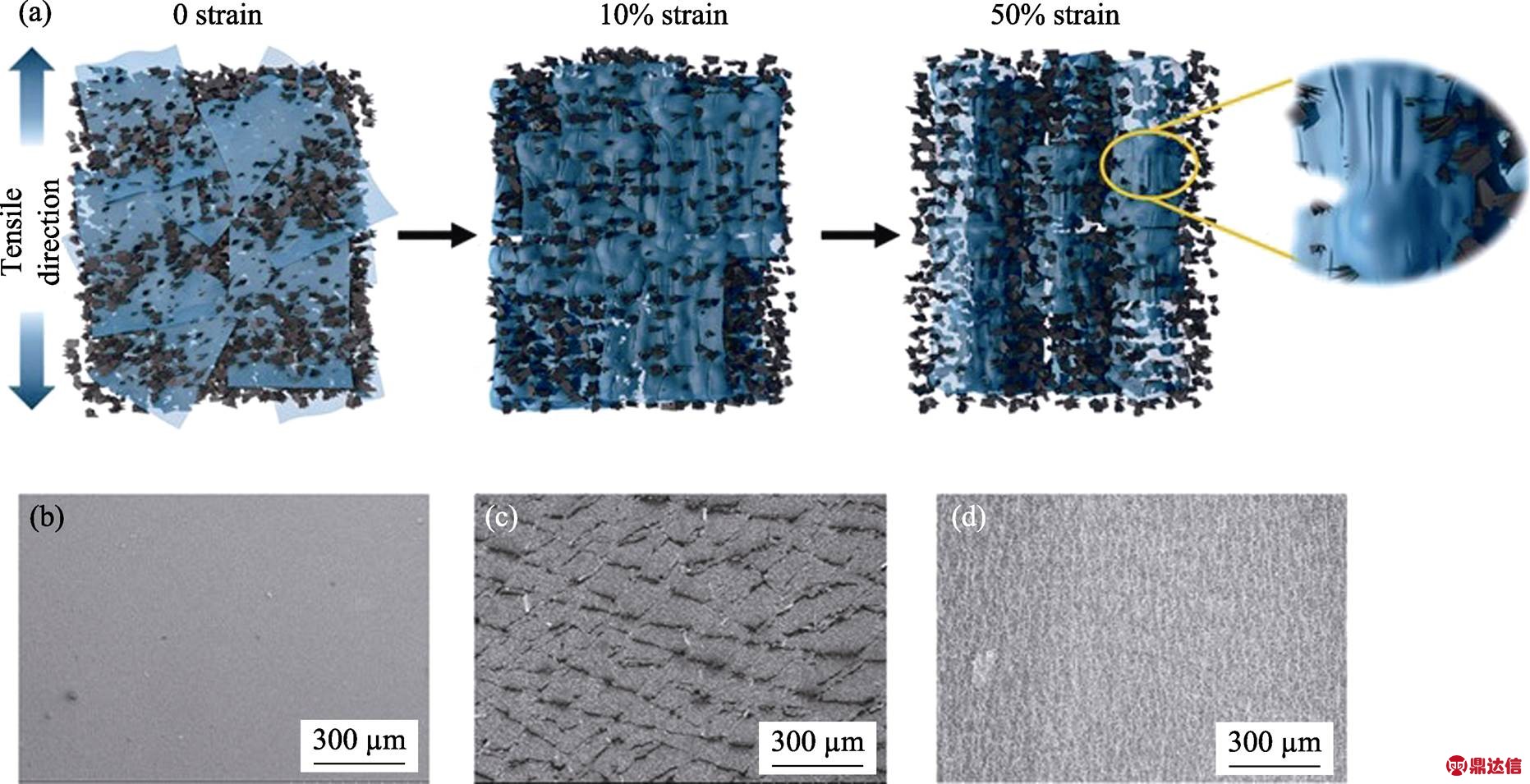
图5 (a)HF18h-d20min-Ti3C2Tx导电薄膜作用机理示意图; 基于(b)HF6h-d3h-Ti3C2Tx, (c)TMA-Ti3C2Tx和(d)HF18h-d20min-Ti3C2Tx导电薄膜的传感器处于最大拉伸状态的SEM照片[15]
Fig. 5 (a) Schematic diagram of the HF18 h-d20 min-Ti3C2Txconductive film at various stretching states during the first stretching-releasing cycle. Top-view SEM images of (b) HF6h-d3h-Ti3C2Tx-, (c) TMA-Ti3C2Tx-, and (d) HF18h-d20min-Ti3C2Tx-based strain sensors in the maximum tensile state[15]
2.1 基于多层MXene的柔性压阻传感器
将MAX相块体用一定浓度的氢氟酸刻蚀去除A原子层后会得到手风琴形状的多层MXene块体, 每一个块体都由若干MXene单片层组成。Gao等[59]将多层Ti3C2Tx的乙醇分散液滴涂到聚酰亚胺(PI)集成电极上, 封装后制成柔性压阻传感器, 其传感机理为在传感器受到压力时, 多层Ti3C2Tx块体上的相邻片层的间距发生改变, 使得接触电阻发生相应改变, 从而实现压力到电信号的转换(如图6所示)。该传感器在0.19%~0.82%和0.82%~2.13%的压缩应变范围内其灵敏度分别达到了180.1~94.8和94.8~45.9。在0.19%~0.82%应变区域内, 随着压强的增加, 多层Ti3C2Tx块体上的片层间距逐渐减小, 电阻也逐渐减小, 灵敏度较大, 而当应变达到0.82%以上时, 片层间距已接近饱和, 无法继续减小, 因而灵敏度下降。此外, 该传感器还具有较低的检测限(351 Pa), 较短的响应时间(30 ms)和稳定的循环性能(4×103次以上), 具有较好的综合传感性能。
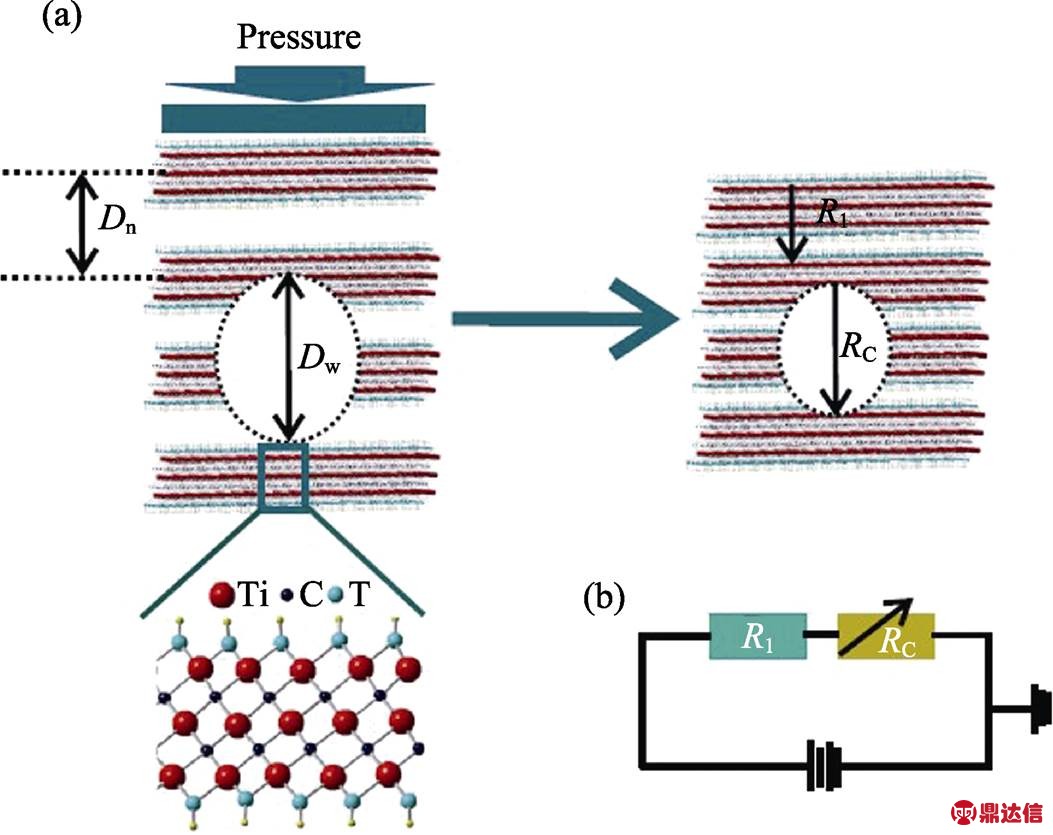
图6 MXene基压阻传感器的(a)传感器机理示意图和(b)等效电路图[59]
Fig. 6 (a) Working micromechanism and (b) the equivalent circuit diagram of MXene-material for piezoresistive sensor[59]
2.2 基于三维MXene/复合物的柔性压阻传感器
由于二维片层MXenes是从陶瓷相MAX相中剥离而来, 其本身存在一定脆性, 无法承受较大的压力, 因而, 通常需要在MXenes中加入机械强度大的材料作为骨架来支撑传感器的反复受力和回弹。目前常见的MXene基柔性压阻传感器主要有两种, 分别是气凝胶类传感器和MXene/弹性基体传感器。
气凝胶通常由连通的多孔结构构成, 具有高孔隙率, 超轻, 超弹性的特点, 可形变量极大, 能够满足柔性压阻传感器通过形变实现力学信号到电学信号转变的要求。MXene片层由于其自身的脆性通常无法独立形成气凝胶, 需要加入其它高韧性高弹性的材料来提高MXene基气凝胶的机械强度。Gao等[60]将氧化石墨烯与Ti3C2Tx复合并还原制备了MXene/rGO气凝胶(MX/rGO aerogel), 其制备流程如图7所示。当施加外力时, 气凝胶发生形变, 内部的连通孔被压缩, MXene和rGO的接触面积增大, 导电通路增多, 电信号随之发生变化, 从而实现传感。其中, 比表面积较大的rGO片层为气凝胶提供了高机械强度的骨架, 而导电性较好的Ti3C2Tx增强了压力传感器的电阻效应, 两者之间的协同交互作用赋予了传感器优异的传感性能。基于MX/rGO气凝胶的柔性压阻传感器的灵敏度达到了22.56 kPa–1,响应时间短于200 ms, 循环104次仍表现出很好的稳定性。
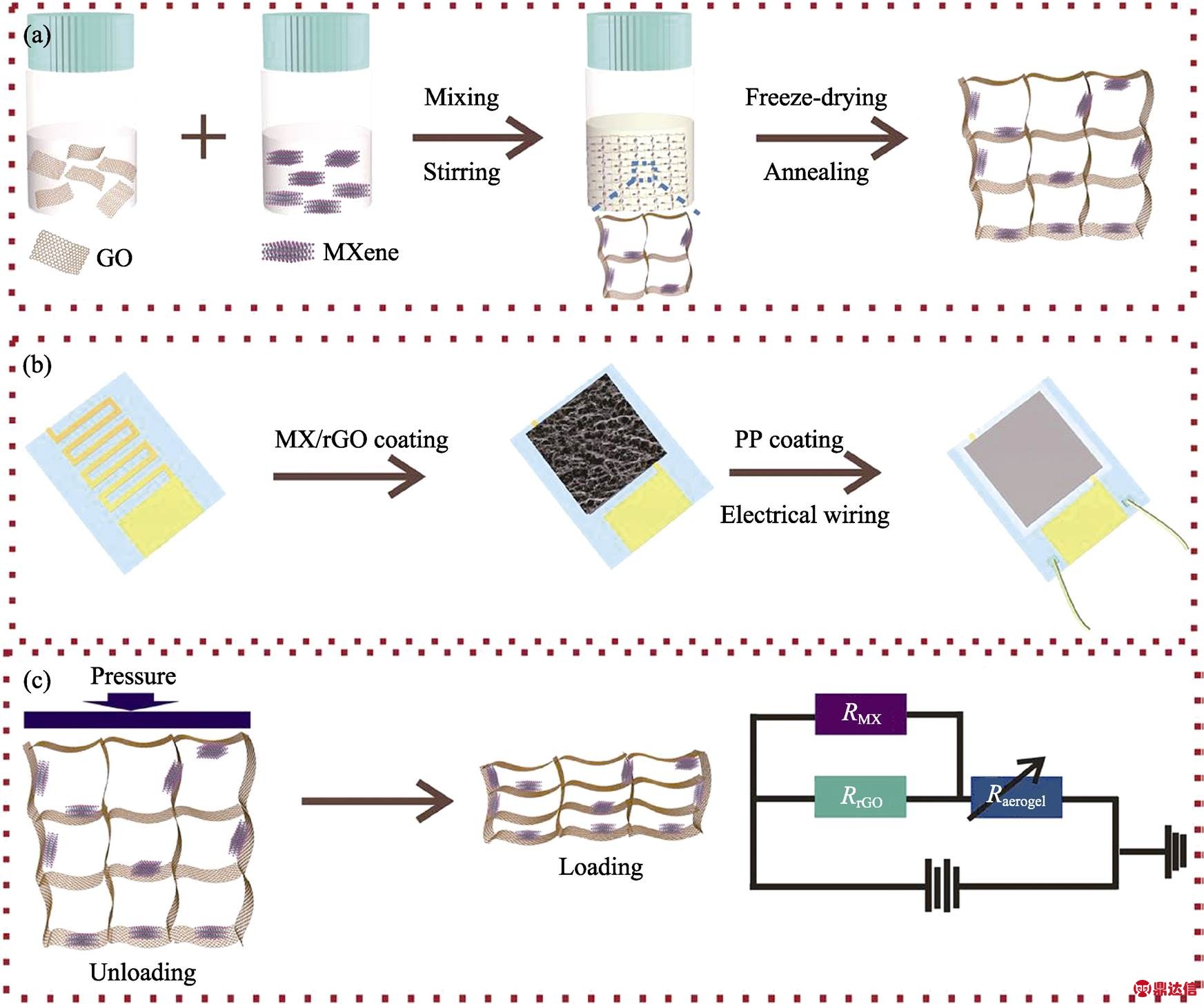
图7 (a)MX/rGO气凝胶的制备流程图; (b)基于MX/rGO气凝胶的传感器的制作流程图; (c)传感机理示意图[60]
Fig. 7 (a) Schematic illustration of fabrication of MX/rGO aerogel, (b) fabrication of MX/rGO aerogel-based sensor and (c) the sensing mechanism[60]
近似地, Yu等[61]将Ti3C2Tx分散液与聚酰胺酸(PAA)均匀混合, 冷冻干燥和煅烧后得到了MXene/聚酰亚胺气凝胶(MXene/PI aerogel)。该气凝胶通过PAA长链连接MXene片层, 具有高弹性和低密度, 可承受压缩、弯曲和扭转等形变, 具有较好的压力传感性能。Zhong等[62]将MXene与纤维素纳米晶(CNC)复合, 利用两者表面所带的羟基等官能团形成的氢键构筑了超弹性的MXene/CNC气凝胶(MX/CNC aerogel)。其中, CNC主要作为分散剂和支撑骨架, 而MXene提供了有序的片层结构。高温退火碳化后, CNC皱缩, MX/CNC气凝胶中的片层呈现波浪状(C-MX/CNC aerogel), 其传感机理如图8所示。当传感器受到压力时, 有序的波浪形片层铺平展开, 片层之间的接触面积增大, 电阻减小, 压力释放后片层恢复原状, 使传感器实现了良好的传感性能。其灵敏度达到了114.6和45.5 kPa–1, 压缩应变检测范围为10%~90%, 检测限低至1 Pa, 线性度高且具有优异的循环稳定性。同样地, Sun等[63]将MXene与细菌纤维素纤维复合形成了波浪形、片层结构的气凝胶传感器, 其传感机理与上述相同。该气凝胶也具有超弹性和较好的传感性能, 在99%的压缩应变下可循环100次, 在50%的应变下可循环105次, 在0~10 kPa压强范围内可实现线性传感, 灵敏度为12.5 kPa–1。由此可见, 将MXene与石墨烯和纤维素等机械强度大的材料复合, 原位生长成同时具有高弹性和高导电率的气凝胶是制备高性能MXene基柔性压阻传感器的有效途径。
除了原位生长的MXene基气凝胶外, 还有一种常见的MXene基压阻传感器, 是将MXene片层直接负载到已成型的高弹性基体上形成的, 同样利用了MXenes的高导电性和弹性基体的高机械性能来满足柔性压阻传感器对电阻效应和几何特性的要求。Gao等[64]将高孔隙率(97%)、高弹性的三聚氰胺海绵浸渍到一定浓度的Ti3C2Tx分散液中, 利用海绵的多孔结构和与MXene之间的范德华力, 使MXene片层紧紧吸附在海绵的骨架上, 形成一层均匀的导电薄层(如图9)。当MXene海绵承受压力而发生形变时, 海绵内部的纤维网络之间的接触面积显著增大, 从而引起电信号的变化, 实现传感。该Mxene海绵压阻传感器具有超高的灵敏度, 在0~5.37 kPa和5.37~18.56 kPa压强范围内的GF分别高达147和442 kPa–1, 它同时还具有很低的检测限(9 Pa), 较快的响应时间(138 ms)和优异的循环稳定性(104次以上), 充分体现了这种传感器结构的优越性。Yu等同样使用浸渍法将MXene片层负载到了壳聚糖(CS)处理的聚氨酯海绵(PU)的骨架上[65], 由于MXene片层表面带负电, 而壳聚糖带正电, 根据正负电荷相吸的原理, MXene片层能够均匀紧密地吸附在海绵上。该传感器的灵敏度可以分为三个阶段, 在0~6.5、6.5~85.1和85.1~245.7 kPa范围内的灵敏度分别为0.014, –0.015和–0.001 kPa–1, 在第一段压强范围内MXene海绵骨架上的MXene片层由于受力而产生微裂纹导致电阻增大, 而此时的微小形变还不足以使海绵骨架之间的接触面积增加, 因而在该阶段整个体系的电阻增大。在第二和第三阶段, 海绵受到了足够大的压强使其内部的纤维之间的接触面积增加, 形成了更为致密的电子传输路径, 因而导电性提高。相比于其他柔性压阻传感器, 该传感器的灵敏度虽然不够出色, 但其大于200 kPa的感应范围超过了大多数目前已报道的传感器, 适用于活动范围较大的运动监测。此外, 该传感器还具有超快的响应速度(19 ms)以及很低的检测限(9 Pa), 展现出了较为优异的综合性能。近期, Yu等[66]将MXene片层浸渍到多孔织物上, 并将其与两层可降解的聚乳酸(PLA)薄片构筑成三明治结构, 组装成瞬态压力传感器。施加/释放压力时, MXene/多孔织物和带有电极的聚乳酸薄片之间的接触面积发生改变, 电信号也相应发生变化, 实现传感。该传感器在23~982 Pa、982 Pa~10kPa和10~30 kPa压强范围内的灵敏度分别为0.55、3.81和2.52 kPa–1, 响应时间极短, 仅为11 ms, 检测限为10.2 Pa, 循环稳定性达到104次以上。此外, 该传感器还具有可降解的特性, 在氢氧化钠中浸泡14 d以上可完全降解, 增加了其实用性。
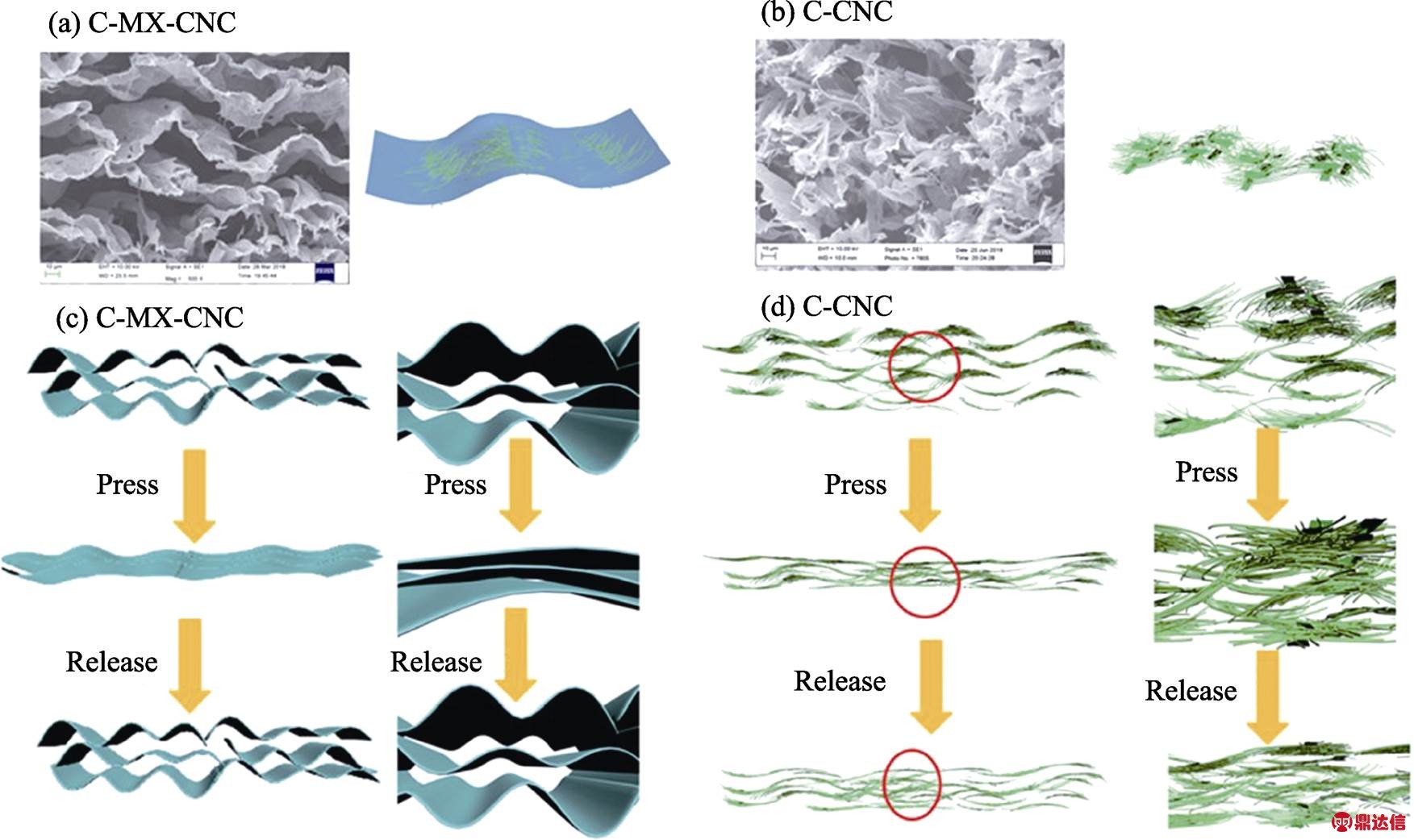
图8 (a)C-MX/CNC气凝胶, (b)C-CNC气凝胶的扫描电镜照片和结构示意图, (c)C-MX/CNC气凝胶, (d)C-CNC气凝胶的弹性机理[62]
Fig. 8 SEM images and schematic structures of (a) C-MX/CNC and (b) C–CNC; Schematic elasticity mechanisms of (c) C-MX/CNC and (d) C–CNC[62]
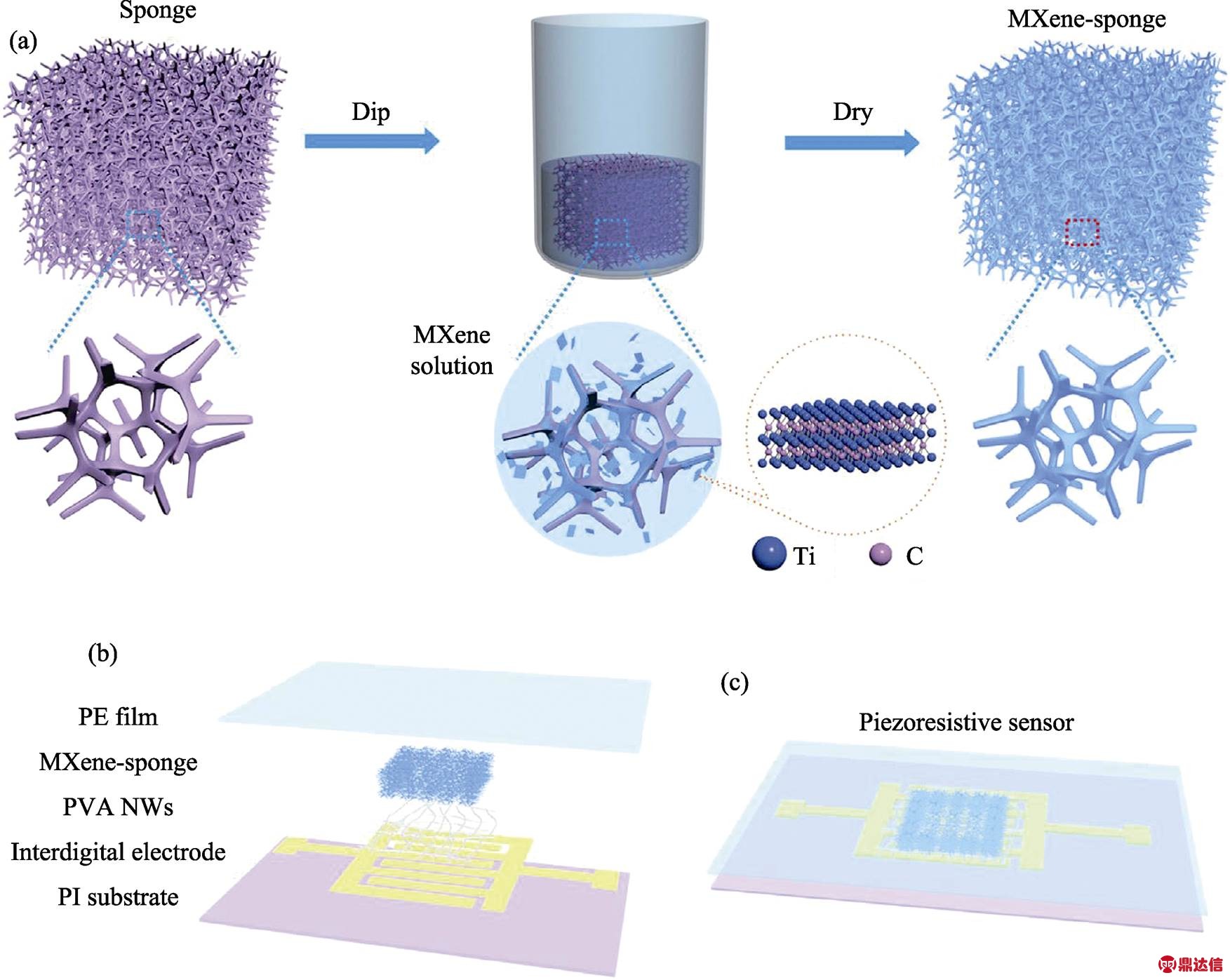
图9 (a)MXene海绵和(b~c)MXene海绵/PVA纳米线传感器的制作流程图[64]
Fig. 9 Schematic illustrations of fabrication procedure of (a) MXene-sponge and (b-c) fabrication of MXene-Sponge/PVA NWs based sensor[64]
综上所述可以发现, 虽然均采用浸渍法将MXene片层负载到多孔弹性基体的骨架上形成导电网络, 但由于弹性基体的种类不同, 其弹性模量等机械特性也不同, 导致制备的压阻传感器在传感性能上有很大的差异, 根据其不同的性能优势可以将传感器应用于不同的人体活动上。
3 总结与展望
MXene材料因其良好的导电性、机械性能、亲水性以及易于进行形貌调控的优点逐渐在柔性电子传感器领域占领一席之地。近年来基于MXene材料的电阻式柔性力敏传感的研究揭示, MXene基柔性应变传感器和MXene基柔性压阻传感器的导电敏感材料结构, 以及传感器机理和传感性能的分析方面, 取得了较好的进展。通过充分考虑MXene材料自身的优势以及器件的目标需求, 将MXene材料与其他合适的材料进行复合形成新的传感体系, 能够使MXenes和其他相材料之间的协同效应得到最大化, 从而得到灵敏度高和响应范围宽的高性能柔性力敏传感器。
然而, 若要真正实现MXene基柔性力敏传感器在医疗检测、电子皮肤和国防安全等领域的应用要求, 仍存在诸多问题亟待解决:
1) MXenes 材料本身的抗氧化性并不理想, 从而影响基于该材料的柔性传感器的稳定性, 亟需探究提高MXenes的抗氧化性的方法以便进行后续探索。
2) MXenes材料的制备过程中通常需要使用含氟试剂, 危险性较大, 对于实现批量化生产过程中的安全性和废液处理有很高的要求, 因而如何实现无氟制备是使MXenes实用化的关键问题。
3) 目前的MXene基柔性传感器存在电阻式传感器共同的弊病, 即无法在较大的应变范围内实现线性感应, 从而影响传感器在实际应用中的程序化设置, 因而需要对MXenes材料及其复合材料的微结构进行进一步的设计以提高传感器的线性度。
4) 目前已有的MXene基压阻传感器均是基于气凝胶等多孔结构, 微结构较为单一, 使传感器未能同时满足高灵敏度和宽响应范围的要求, 亟需丰富MXenes材料的三维结构以提高传感器的综合性能。


