
摘要 基于非线性压磁方程,通过COMSOL有限元仿真平台,分析了片状铁镓合金的压磁效应。仿真研究了不同偏置磁场和不同应力下铁镓合金动态压磁系数的变化。参考悬臂梁特性,利用铁镓合金设计并制作了一种新型的磁致伸缩力传感器。根据电磁学理论和压磁效应,建立了力传感器的测试模型。搭建磁致伸缩力传感器实验平台,通过实验研究了偏置磁场和力对输出特性的影响。通过仿真和实验结果可知,偏置磁场强度为4.5 kA/m时,压磁系数最大值为17.5 T/GPa。传感器的测力范围为0~4 N,在0~2 N内传感器有较高的灵敏度。该传感器具有结构简单,灵敏度高等优点,可满足对力精确感知的要求。
关键词:压磁系数 磁致伸缩 非线性本构模型 力传感器
0 引言
式中,ɛ为应变;M为磁化强度;Ms为饱和磁化强度;λs为饱和磁致伸缩应变系数; 为初始磁化率;σs为饱和预应力;μ0为真空磁导率;E为杨氏模量。根据电磁学原理,结合式(3)可得压磁系数为
为初始磁化率;σs为饱和预应力;μ0为真空磁导率;E为杨氏模量。根据电磁学原理,结合式(3)可得压磁系数为
压磁系数是指单位应力引起磁致伸缩材料磁感应强度的变化量,因而压磁系数与磁致伸缩压力传感器的灵敏度密切相关[8-9]。阳昌海等利用磁致伸缩非线性本构模型推导了零应力下的压磁系数与偏置磁场的关系,确定了偏置磁场对磁致伸缩/弹性/压电层状复合材料的磁电效应和谐振频率的影响规律[10]。周浩渺等基于等效电路法建立了非线性磁电系数模型的本构关系,研究了在预应力和偏置磁场作用下磁致伸缩/压电/磁致伸缩层状磁电复合材料的磁电效应[11]。文献[12]通过实验研究了压应力和拉应力对压磁系数的影响,通过拟合得到压磁系数对应力的变化曲线。文献[13]设计的磁致伸缩压力传感器采用悬臂梁结构,可测试0~6 N的动态力,并通过实验得到了传感器的输出特性,确定了偏置磁场为4.8 kA/m时,传感器输出峰值达到最大。可见压磁系数与偏置磁场和应力之间存在复杂的非线性关系,因此研究偏置磁场和应力对压磁效应的影响,对磁致伸缩传感器的设计及结构优化具有重要意义。
本文基于非线性压磁方程,利用COMSOL有限元仿真软件研究了应力和偏置磁场对压磁效应的影响,分析了压磁系数随应力和偏置磁场的变化规律,得出小应力下最大压磁系数对应的偏置磁场。参考悬臂梁结构特点,应用铁镓合金设计制作了一种新型的力传感器,用于机械手对抓取力的测量。结合非线性本构模型和JA模型,推导了传感器测试力的输出模型。搭建了磁致伸缩力传感器的实验平台,验证了应力和偏置磁场对压磁系数的影响,同时验证了传感器输出模型的有效性。
1 压磁效应原理及模型
压磁效应是指材料受外力作用时,其内部产生的应力使材料磁化强度发生变化的现象。磁致伸缩材料的这种特性可用于将机械信号转换为磁信号。
片状铁镓合金悬臂梁自由端在受到垂直于片表面的力时,其内部磁畴分布如图1所示。通入直流电流的线圈为片状铁镓合金提供沿长度方向的偏置磁场。图1a为铁镓合金未受力时,合金中性面截线(虚线)上下的磁畴方向均沿偏置磁场方向排列。图1b为铁镓合金受力大小为F时,合金中性面截线上方磁畴基本上未发生偏转,下方的磁畴向垂直于偏置磁场的方向发生偏转。这是由于铁镓合金中性面截线上方受到拉应力,下方受到压应力。拉应力使合金中的磁畴向与磁场平行的方向转动,压应力使合金中的磁畴向与磁场垂直的方向转动,但是当偏置磁场较高时,偏置磁场足以使合金内所有的磁畴均转到与磁场平行的方向,拉应力对磁畴的偏转影响较小[1]。当片状铁镓合金悬臂梁自由端受力时,其内部平均磁感应强度减小。
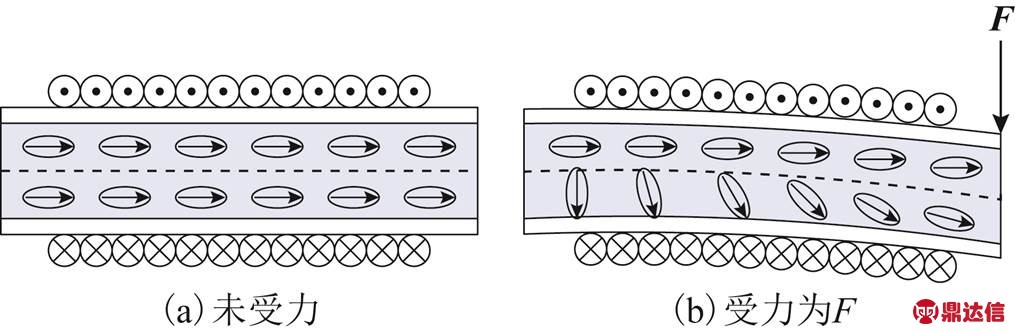
图1 未受力和受力时铁镓悬臂梁内部的磁畴分布
Fig.1 Magnetic domain distribution in Galfenol cantilever beam without and with force
磁致伸缩材料铁镓合金(Galfenol)具有在低磁场下应变高、滞后小和应力灵敏度高等优点[1]。相比于稀土磁致伸缩材料(Terfenol-D)和压电材料,铁镓合金具有脆性小、抗拉强度高等良好的机械性能[2-4],可广泛应用于换能器、传感器和振动能量采集器等领域。利用Galfenol的压磁效应可研制磁致伸缩位移传感器[5]、磁致伸缩应变传感器[6]和磁致伸缩压力传感器[7]等。
 (1)
(1)
式中,B为铁镓合金内的磁感应强度; 为压磁系数;σ为应力;μ为磁导率;H为偏置磁场强度。磁感应强度B受偏置磁场强度为H的磁场和应力σ的共同影响,压磁系数也受偏置磁场H和应力σ的共同影响。
为压磁系数;σ为应力;μ为磁导率;H为偏置磁场强度。磁感应强度B受偏置磁场强度为H的磁场和应力σ的共同影响,压磁系数也受偏置磁场H和应力σ的共同影响。
压磁系数可直观地体现铁镓合金的磁机转换效率,影响传感器的输出特性[2]。压磁系数越大,单位应力引起铁镓合金磁感应强度的变化量越大。为了得到压磁系数与偏置磁场H和应力σ的关系,采用文献[14]提出的非线性本构模型,即
 (2)
(2) (3)
(3)
其中

基于磁致伸缩材料的压磁方程,磁感应强度可表示为
 (4)
(4)
文献[10]根据式(2)和式(3)推导出Terfenol-D的动态杨氏弹性模量、动态压磁系数与偏置磁场的关系。式(2)和式(3)表明,磁致伸缩和磁化强度与应力和磁场存在复杂的耦合关系,故本文通过COMSOL仿真软件对动态压磁系数进行求解。
2 仿真结果与分析
采用COMSOL仿真软件对片状铁镓合金悬臂梁三维建模,悬臂梁为35 mm×5 mm×1 mm的薄片,其左侧固定端长度为5 mm,励磁线圈的匝数N=140,线圈电流为3 A。在COMSOL软件中,定义式(2)、式(3)中参数[15]为:Ms=1.4×106 A/m,λs=200×10-6, =200, σs=55 MPa, μ0=4π×10-7T·m/A,E=76×109 Pa。
=200, σs=55 MPa, μ0=4π×10-7T·m/A,E=76×109 Pa。
图2为铁镓合金悬臂梁的仿真磁场分布。由图2可知,片状铁镓合金中心处的磁感应强度最大,可达到1.2 T。
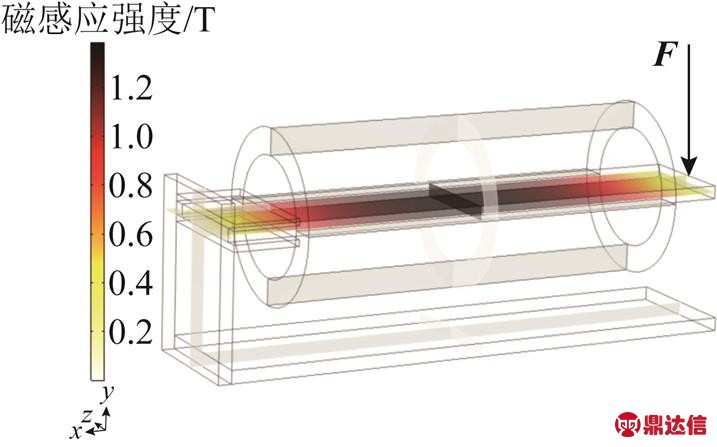
图2 铁镓合金悬臂梁仿真磁场分布
Fig.2 Simulation magnetic field distribution of Galfenol cantilever beam
悬臂梁的受力点如图2中箭头所示,通过调整线圈电流和施加力的大小对悬臂梁施加不同偏置磁场和应力。磁感应强度与偏置磁场和压应力的仿真关系如图3所示。当励磁线圈通入0~5 A电流时,悬臂梁下表面中心处的磁场强度为0~47.39 kA/m,在悬臂梁受力点施加0~8 N的力,梁下表面中心处产生0~ -72 MPa的压应力。
图4为不同偏置磁场下磁感应强度与压应力的关系。当偏置磁场强度小于1.11 kA/m时,磁感应强度随压应力的变化率较小,这是因为弱磁场下应力对磁畴偏转影响很小。当偏置磁场强度在1.11~ 18.69 kA/m区间时,磁感应强度的变化率较大,且随着压应力的增大磁感应强度逐渐减小。当偏置磁场强度大于18.69 kA/m时,磁感应强度随压应力的变化率较小,主要是由于磁场强度过大导致应力对磁畴偏转影响变小。
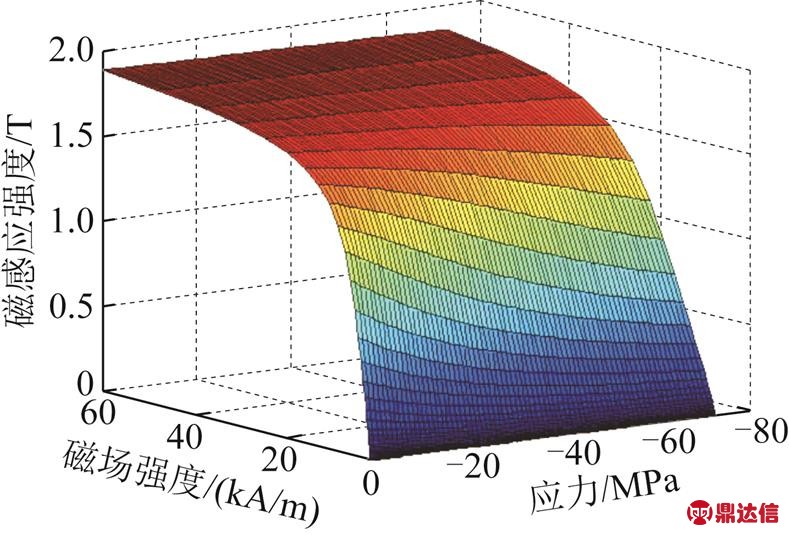
图3 磁感应强度与偏置磁场和压应力的仿真关系
Fig.3 Simulation relationship between magnetic induction intensity and bias magnetic field and compressive stress
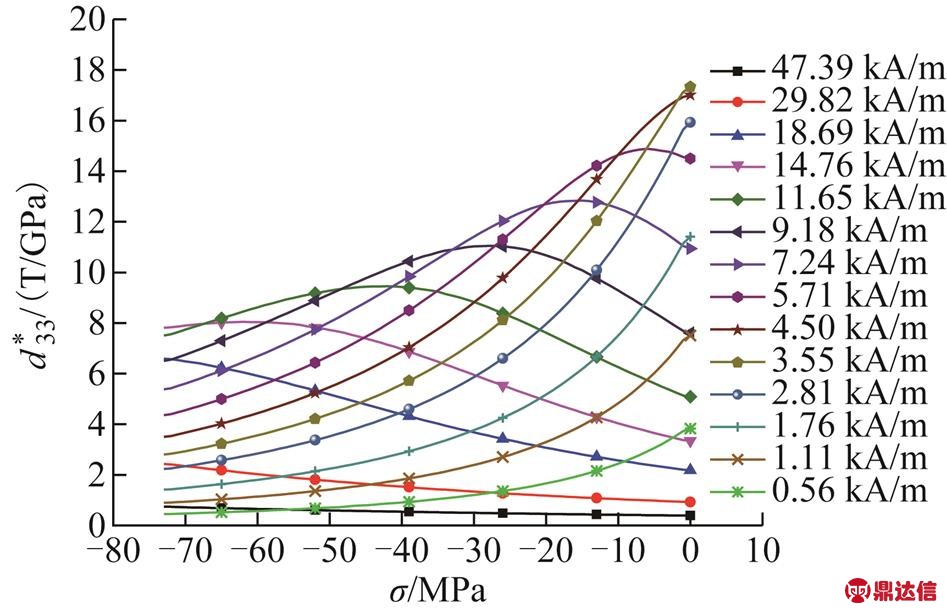
图4 不同偏置磁场下磁感应强度与压应力的关系
Fig.4 Relationship between magnetic induction intensity and compressive stress under different bias magnetic fields
对图4中各条曲线进行求导,可得到在不同偏置磁场下的压磁系数与压应力的变化曲线,如图5所示。是一个与偏置磁场和应力相关的函数。通过提取图5中不同应力下的压磁系数,绘制不同应力下与偏置磁场的关系曲线,如图6所示。
通过分析图5和图6可知,随着磁场强度的增大,压磁系数先增大再减小最后趋于稳定;随着压应力的增大,压磁系数最大值逐渐减小且向右偏移。当应力为0 MPa、偏置磁场强度为4.5 kA/m时,压磁系数达到最大值17.5 T/GPa。当应用铁镓材料设计悬臂梁式传感器时,为增加传感器的灵敏度,应选择压磁系数最大值对应的偏置磁场,即4.5 kA/m。
图5 不同偏置磁场下压磁系数与压应力的关系
Fig.5 Relationship between piezomagnetic coefficient and compressive stress under different bias magnetic fields
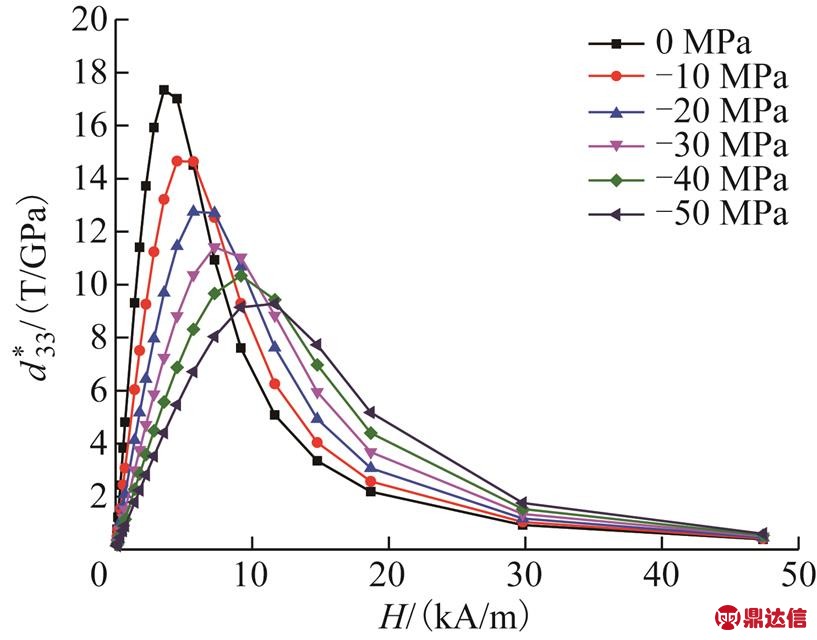
图6 不同压应力下压磁系数与偏置磁场的关系
Fig.6 Relationship between piezomagnetic coefficient and bias magnetic field under different compressive stresses
3 磁致伸缩力传感器设计
3.1 传感器结构
基于铁镓合金的压磁效应设计了一种磁致伸缩力传感器,结构如图7所示。传感器由硬质触杆、铁镓悬臂梁、线圈、霍尔元件、骨架、硅胶封装等组成。悬臂梁为铁镓合金单层结构,其长度l、宽度w和高度h分别为35 mm、5 mm和1 mm。线圈通入直流电流,为铁镓悬臂梁提供沿长度方向的偏置磁场H。硬质触杆为圆柱状结构,作为力的传递元件引起悬臂梁发生形变。霍尔元件为信号的采集单元,放置在靠近悬臂梁固定端的端部。传感器可使用固定螺栓安装到机械手指上。传感器为圆柱形结构,直径为10 mm,长度为40 mm。传感器的工作原理为:硬质触杆接受到竖直方向的力,引起悬臂梁发生形变,由于压磁效应,铁镓合金内部磁畴发生偏转,导致磁感应强度B发生改变,使霍尔元件的输出电压变化。

图7 传感器结构
Fig.7 Sensor structure
3.2 磁致伸缩力传感器输出电压与施加力关系
霍尔元件可用于测量悬臂梁受力后的磁感应强度的变化,检测磁感应强度幅值,灵敏度不受施加力的频率影响。结合电磁学原理可得霍尔元件输出电压V与铁镓悬臂梁内磁感应强度B的关系为
 (5)
(5)
式中,KH为霍尔系数;Kc为磁感应强度传递系数。
M. J. Dapino等基于磁机械效应建立了应力与磁化强度关系的模型[16]。在理想条件下,参考文献[16]并应用变形的Langevin方程[17],可得到与应力相关的无磁滞磁化强度为
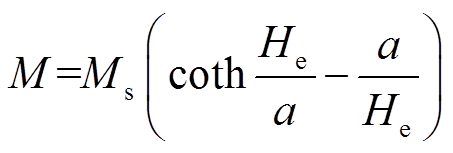 (6)
(6)
式中,Ms为材料饱和磁化强度;He为材料有效磁场强度;a为无磁滞磁化强度M的形状系数。He可表示为
 (7)
(7)
式中,α为磁畴作用系数;Hσ为等效应力场,可表示为
 (8)
(8)
结合式(2),将式(7)代入式(6),进行泰勒展开并忽略高次项,可得磁感应强度M为
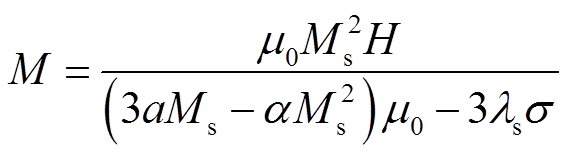 (9)
(9)
悬臂梁在力的作用下,挠度变化较小,主应力平行于中性轴,其应力分布符合欧拉-伯努利梁理论,其截面惯矩I=wh3/12。悬臂梁受到力F产生弯曲时,在厚度为z处的x轴向应力与受力点力F的关系为σ=F(x-l)z/I,悬臂梁的平均压应力为
 (10)
(10)
通过计算可得悬臂梁平均压应力σave=mF,其中m=-9×106 Pa/N,结合式(9)和式(10),取F=0时的霍尔元件输出电压为参考电压Vref,可知传感器输出电压为
 (11)
(11)
式(11)为力传感器的输出电压模型,可使用该模型计算U与F的关系曲线。计算中使用的参数为[15]:μ0=4π×10-7 N/A2,Ms=1.4×106 A/m,λs= 200×10-6,α=0.008,a=7012 A/m。霍尔元件的KH=417 mV/mT,通过实验测量Kc=0.002 61。
4 实验结果与分析
搭建的磁致伸缩力传感器测试平台如图8所示。测试平台由压力调节装置、磁场调节装置、传感器和示波器等组成。压力调节装置采用立式压力测试平台,通过加压装置向传感器提供0~4 N的力。磁场调节装置为可控直流电源,通过改变励磁线圈中的电流产生不同的偏置磁场。霍尔传感器SS491b用来测量铁镓薄片的漏磁通分量,获得传感器的输出信号。通过示波器测量传感器受到力时输出电压的波形。为保证实验数据的可靠性,每点进行3次测量并取平均值。
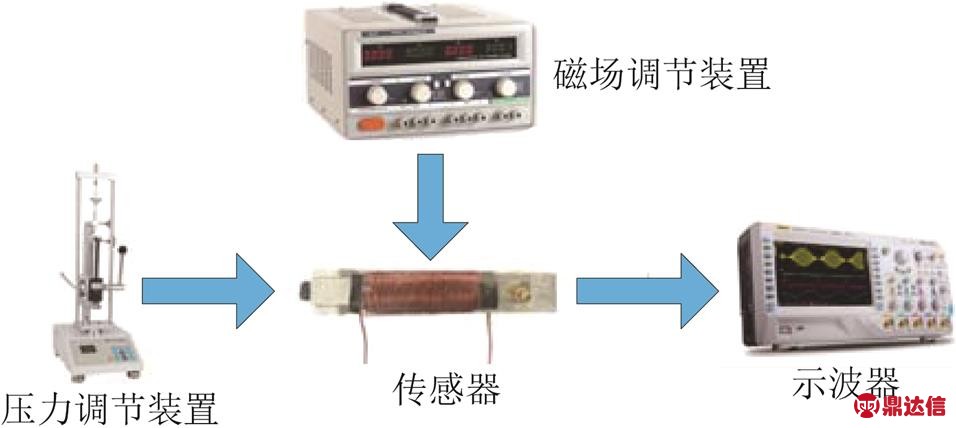
图8 传感器测试平台
Fig.8 Sensor testing platform
应用测试平台在不同的偏置磁场下测量了霍尔传感器输出电压和力的关系曲线。由于霍尔传感器的量程限制,测试中偏置磁场从1.1 kA/m增加到7.9 kA/m。不同偏置磁场下霍尔传感器输出电压与力的关系如图9所示,同时数据进行线性拟合。可以看出,当力从0 N增加到4 N时,霍尔传感器的输出电压随力增加而减小。但是在偏置磁场为1.1 kA/m和7.9 kA/m时,电压的变化率较小。由图6可知,当磁场为1.1 kA/m和7.9 kA/m时,铁镓合金的压磁系数较低,从而导致电压的变化率较小。
求解图9中拟合曲线的斜率,可得到在不同偏置磁场下的传感器灵敏度实验值s。依据传感器灵敏度的定义,应用式(5)可得到传感器灵敏度为 。根据图5可确定平均压磁系数,得到的压磁系数和传感器的灵敏度计算值与实验值列于表1。可见传感器灵敏度的计算值与实验值基本符合,最大误差为5.3%。偏置磁场为4.5 kA/m时,传感器灵敏度最大,具有最佳的输出特性。
。根据图5可确定平均压磁系数,得到的压磁系数和传感器的灵敏度计算值与实验值列于表1。可见传感器灵敏度的计算值与实验值基本符合,最大误差为5.3%。偏置磁场为4.5 kA/m时,传感器灵敏度最大,具有最佳的输出特性。
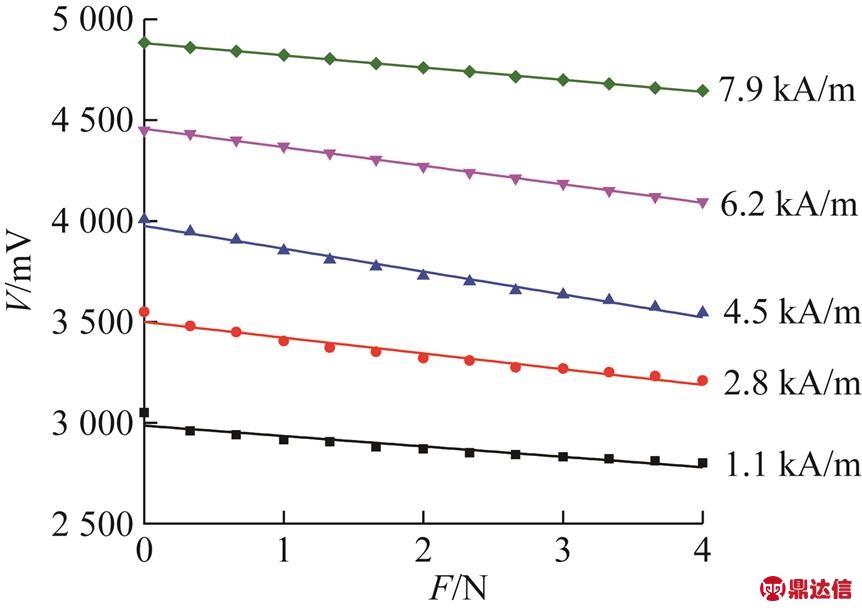
图9 不同偏置磁场下霍尔传感器输出电压与力的关系
Fig.9 Relationship between output voltage and force of Hall sensor under different bias magnetic fields
表1 压磁系数和传感器的灵敏度计算值与实验值
Tab.1 Piezomagnetic coefficient, calculation and experiment value of sensor sensitivity

在4.5 kA/m的偏置磁场下,使用压力测试平台测试了磁致伸缩力传感器的输出电压U与施加力F的关系,传感器的测力范围为0~4 N,测量4 N的力时输出电压达到最大,为445 mV。图10为偏置磁场为4.5 kA/m时传感器的输出电压与力的关系,计算值由式(11)得到。图10表明输出电压与力呈非线性关系,测试力在0~2 N内,研制的传感器具有较高的灵敏度;测试力在2~4 N内,传感器的灵敏度略微降低。从图10可知,计算值与实验值基本一致,表明可用式(11)计算传感器的输出电压与测试力。
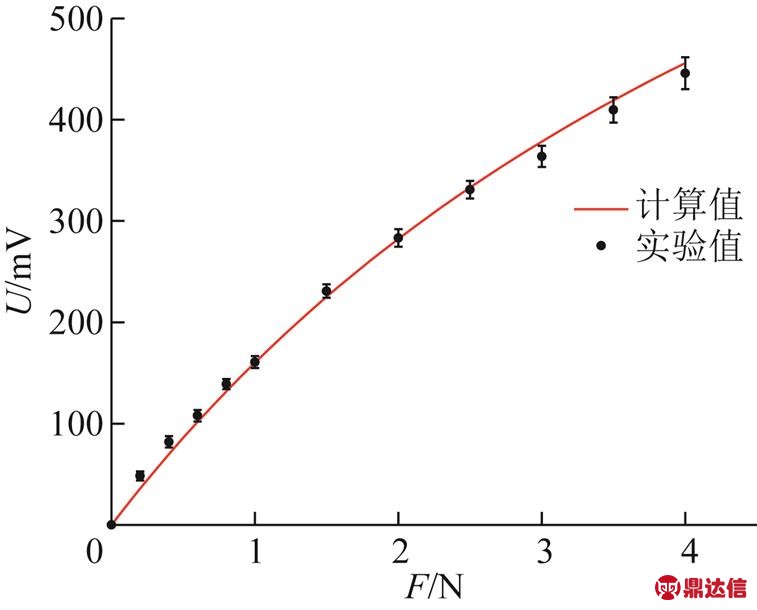
图10 偏置磁场为4.5 kA/m时传感器的输出电压与力的关系
Fig.10 Relationship between output voltage and force at the bias magnetic field of 4.5 kA/m
5 结论
基于非线性压磁方程,采用COMSOL有限元仿真软件对片状铁镓合金悬臂梁进行建模,研究了偏置磁场和应力对压磁系数的影响规律。设计制作了一种新型力传感器,应用电磁学理论、压磁效应,建立了传感器测试力的输出电压模型。计算结果与实验结果基本一致,表明建立的模型可描述力传感器的输出特性。由仿真和实验结果可知,偏置磁场强度为4.5 kA/m时,压磁系数达到最大值17.5 T/GPa。传感器的测力范围为0~4 N,在0~2 N范围力具有较高测试灵敏度,在2~4 N范围力的测试灵敏度略微低。该传感器具有结构简单、灵敏度高等优点,可满足对力精确感知的要求。


