
摘 要: 提出一种可用于气动微流控芯片气压控制的PDMS电磁微阀。阐述了PDMS电磁微阀的工作原理与结构,给出了电磁驱动器数学模型。建立了自感系数、线圈电流、阀芯运动电压、机械运动和电磁吸力的仿真模型;建立了PDMS电磁微阀电磁力、阀膜弹性变形力与微流道内气、液作用力之间的多物理场耦合数学模型。利用MATLAB/Simulink软件建立PDMS电磁微阀阀膜形变模型、出口流量模型,并与5个电磁驱动器子模块连接。对电磁驱动器动态响应特性和PDMS电磁微阀流量动态特性进行仿真分析,给出了PDMS电磁微阀阀芯驱动力、阀芯响应特性和动态流量特性分析结果。
关键词: PDMS电磁微阀;数学模型;响应特性;流量特性
Abstract: A novel PDMS electromagnetic microvalve which can be used in the pneumatic pressure control for lab-on-a-chip applications is presented. The structure and the working principle of the pneumatic electromagnetic microvalve are introduced. The mathematical models of the electromagnetic actuator are given, and the simulation models of the self-inductance coefficient, the coil current, the motion voltage, the mechanical motion, and the electromagnetic force are researched. The multi-physical field coupling mathematical models of the electromagnetic force, the elastic deformation force of the valve-membrane, the flow force of gas and liquid in pneumatic microchannels are developed. The deformable model of the valve-membrane, the outlet flow rate model of the PDMS electromagnetic microvalve, and the five sub models of the electromagnetic actuator are given by the software MATLAB/Simulink. The simulation of the dynamic response of the electromagnetic actuator and the dynamic flow rate of the PDMS electromagnetic microvalve is carried out. The predicted characteristics of the valve-spool driving force, the valve-spool response time, and the dynamic flow rate of the PDMS electromagnetic microvalve are given.
Key words: PDMS electromagnetic microvalve, mathematical model, response time, flow rate
引言
近年来,微流控芯片实现了由简单的单元操作到大规模集成芯片的飞跃,在生物和化学分析中得到了越来越多的成功应用[1-2]。气动微流控芯片外部气路控制系统中常规尺寸电磁阀组的体积远大于微流控芯片本身,且所需的数量繁多,价格昂贵,结构复杂,其所使用的硬质材料也很难与气动微流控芯片进行集成,使得微流控芯片没有实现真正意义上的微型化和集成化[3-4]。因此,设计体积小、便于携带且能作为微流控芯片外部控制模块的电磁微阀是十分必要的。
方法2:加热鉴别法。取等量水样于两支洁净试管中,加热,在管壁内留下较多水垢的水样是硬水,水垢较少的水样是软水。
为了避免使用外部常规伺服阀,研究人员对外部气压控制微阀进行了研究。Whitesides课题组设计了转矩控制微阀,该阀利用微流道上方安装的能够旋入和旋出的螺钉来控制微流道的开启和关闭,取代外部庞大的气路控制系统[5-6],这种微阀结构简单,但难以实现自动化。ZHENG和CHEN提出一种螺钉驱动的气动微阀,利用螺钉旋入旋出控制阀膜位移[7-8],但该种设计方法不但很难实现自动化,而且不能重复使用。SIA也利用控制层充水的方法来取代充入气体,而且用一个改进的伺服阀作为动力源,自动化程度大大提高[9]。CHIA提出一种PDMS热气动微阀,缺点是产生较高的温度,容易破坏生物试剂的活性[10]。BURNS利用石蜡遇热融化受冷凝固的特点设计了相变微阀,但原理较为复杂,且难以重复使用[11]。TAKAYAMA提出了利用多层软刻蚀技术和喷墨式打印机针头来代替Quake阀气动驱动器[12-13],但微阀的位置不灵活,对微流控芯片的设计不利。WIEDERKEHR提出了一种聚偏二氟乙烯微阀,缺点是该阀压电驱动器需要DC300V电源[14]。
本研究针对目前气动微流控芯片控制系统的需求,结合微流控系统微阀的发展现状,提出一种微型化、结构简单,且易与气动微流控芯片集成的PDMS电磁微阀。由于PDMS电磁微阀结构尺寸小,其软蚀刻封装过程对环境要求较高,且极易封装失败。因此采用动态模型对新型电磁微阀动态特性进行仿真分析,从理论上研究该微阀是否能够满足响应速度和流量稳定性等要求,节省反复封装和多次实验成本。建立电磁驱动器动态响应模型和阀膜受力多物理场耦合数学模型,利用MATLAB/Simulink软件对电磁驱动器反向电动势、电磁吸力和阀芯响应时间,以及PDMS电磁微阀出口流量进行仿真、分析,给出PDMS电磁微阀阀芯驱动力、阀芯响应特性和动态流量特性分析结果。
1 工作原理及结构设计
PDMS电磁微阀由上层PDMS平膜(阀膜)、带微流道的下层PDMS厚膜和电磁驱动器组成,如图1所示。工作原理如下:当电磁驱动器未通电时,由于弹簧的预紧力推动阀芯,阀芯压向上层PDMS阀膜,阀膜向下变形,堵塞阀口,微阀处于关闭状态;当电磁驱动器通电时,产生的电磁吸力克服弹簧力,将阀芯吸起,阀膜形变恢复,流道导通;当电磁驱动器断电时, 电磁吸力消失,阀芯在弹簧力作用下向下运动,迫使阀膜向下变形,流道关闭。电磁驱动器采用电压DC24 V,电流42 mA,功耗1 W。
由于志书的总体结构是按事物的科学分类和社会分工的实际,横分门类,纵述史实,大事记就像历史的缩写,贯通全志,起到了纵贯全志之经的作用。在20世纪80年代第一轮修志中,一些志书把大事记置于志尾,作为附录的一部分,只起备查作用,失去了大事记作为全志之经的重要地位。在第二轮修志中,大事记被置于全志之首,在概述之后。概述与大事记,一横一纵,共同起到了总揽全志的作用。近年,一些年鉴,如 《河南水利年鉴》(1995—2012卷),一直把大事记置于卷尾,和综合统计、附录放在一起,从2013卷开始把大事记提到了卷首,放在综述、市县水利等主要内容前面,加强了大事记提纲挈领的作用。
以上5个子系统组成了总的余热回收系统(缸套水及烟气换热器系统)。本系统的特点是将不同性质的热量加以综合利用:①缸套水的利用,采用了较高性价比的温差换热设计,板式换热器采用了不锈钢材料,传热效果好、防结垢。②烟气的利用,采用了防露点腐蚀的换热设计,换热器采用强化传热翅片管结构,传热效果好、无露点腐蚀。③系统设计的安全冗余度高,任何一台发动机故障都不影响系统的整体运行,任何一子系统的故障也不影响热水循环发电系统的运行。
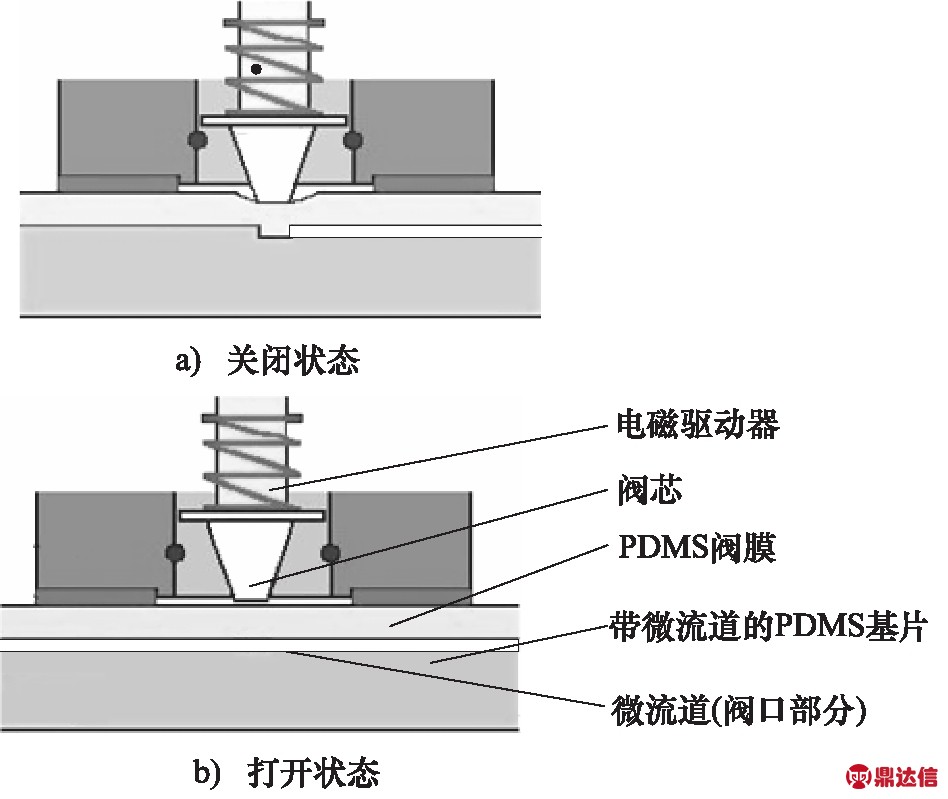
图1 PDMS电磁微阀结构示意图
PDMS电磁微阀驱动装置属于吸入式电磁铁,具有寿命长、径向无抖动、响应时间短、噪音低、动作平稳和可靠性高等特点[15-16]。通电时,衔铁与铁芯之间气隙的磁压降在整个磁通路中占主导地位,该电磁驱动器的结构如图2所示。
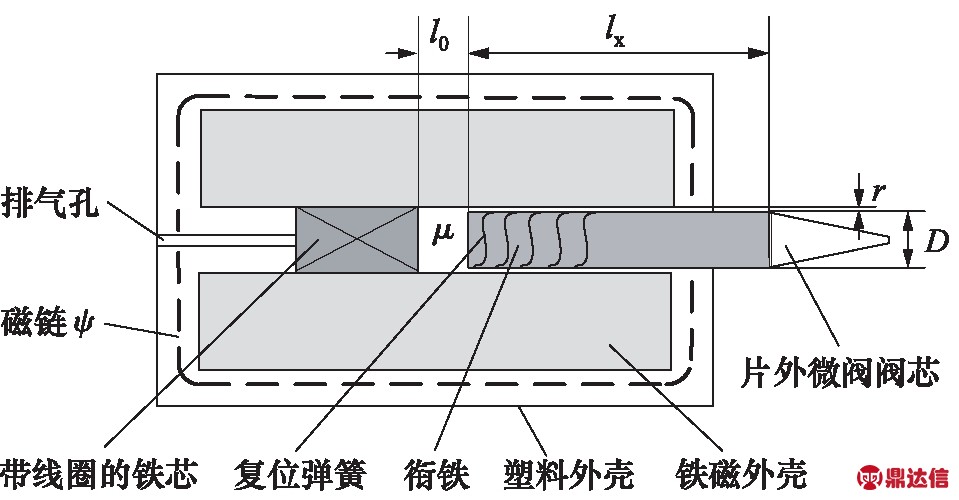
图2 电磁驱动器磁路示意图
2 电磁驱动器动态数学模型
根据电磁场基本理论,可得到电磁线圈电流i的表达式:
i=ψ/L
(1)
式中, ψ —— 磁链,Wb
L —— 线圈电感量,H
线圈的电感量L可表示为:
L=![]()
总之,在计算教学这条看似崎岖的路上,作为执教者的我们还有许多待探索的问题。提高学生的计算能力是我们数学教学的重中之重。教师需要在平时的交流中总结教学策略,创新教学方法。希望本文的总结与论述对小学数学计算教学的发展具有一定的帮助。
(2)
式中, μ0 —— 空气磁导率,H/m
D —— 衔铁直径,m
采用目的抽样法选取本院22名护理专家参与德尔菲咨询,两轮咨询专家相同。专家入选标准:①具有本科及以上学历;②具有副高级及以上专业技术职称;③从事护理管理工作 5年以上;④知情同意。入选的22名专家均为女性,年龄38岁~53岁 (42.87岁±3.72岁); 硕士2名,本科20名;主任护师3名,副主任护师19名;工作年限均>15年。
N —— 线圈匝数,T
lx —— 衔铁长度,m
金融区域化视阈下“一带一路”国际区域金融合作问题探 讨 …………………………… 王学信,刘 佳(59)
l0 —— 工作气隙最大长度,m
δ —— 弹簧变形量即衔铁位移,m
r —— 非工作区域气隙平均宽度(非工作区域气隙为圆环形柱面),m
对L求导可得:
![]() =
=![]()
(3)
电磁吸力F方程为:
(1)构建完善的维修保养制度。在施工中应对现有机械设备进行合理调度,挖掘机械设备潜力,尽可能提高利用率,增大维修与保养管理力度,保证随坏随修,杜绝带病和带伤作业,同时根据施工的实际情况,充分利用间隙的时间保养机械设备,及时发现与解决潜在的问题,使机械设备处于正常运行状态。
F=![]() i2
i2![]()
(4)
电磁驱动器工作时电路中电压平衡方程式为:
u=iR+L![]() +e
+e
(5)
式中, u —— 线圈励磁电压,V
R —— 磁路等效电阻,Ω
e —— 铁被吸动时产生的运动反电动势![]()
v —— 衔铁(阀芯)运动速度,m/s
衔铁(阀芯)运动过程中,线圈产生的电磁吸力F克服弹簧力、摩擦力和PDMS电磁微阀阀膜阻力,最终吸引衔铁向线圈方向运动,因此衔铁运动方程为:
F-k1(δ+δ0)-(Cv+Cf)![]() +k2(h0-δ)
+k2(h0-δ)
=m![]()
其次,科学亦有自身的价值取向和精神追求。科学的精神追求主要体现在对于真理和人类福祉追求。科学本质上是不断探索真理的过程,这主要体现在科学家对于真理的追求和捍卫。比如,布鲁诺为了坚持日心说,宁愿被烧死,也要捍卫真理,便是对科学家追求真理的最好证明。真正的科学还关心人类的福祉。
(6)
式中, F —— 电磁吸力,N
k1 —— 复位弹簧系数,N/m
δ0 —— 弹簧预紧量,m
Cv —— 电磁驱动器速度阻尼系数
Cf —— 工作介质黏性阻尼系数
k2 —— 阀膜变形系数
h0 —— 阀腔深度,m
根据所获的电磁驱动器的数学模型,可建立由5个系统模块组成的仿真模型,这些模块分别为自感系数、线圈电流、阀芯运动电压、机械运动和电磁吸力的仿真模型,将这5个子系统模块封装并连接,就形成了电磁驱动器动态特性仿真模型。利用该仿真模型可计算电磁驱动器工作过程中重要的参数,例如线圈电流、运动反向电动势、电磁吸力、电感量、阀芯运动位移、速度、加速度等。在仿真的求解器设置中,积分采用固定时间步长Δt=0.0001 s。
3 PDMS电磁微阀阀膜受力模型
根据目前气动微流控芯片控制系统的需求,电磁微阀阀口长度、宽度、深度设计尺寸分别为1000、 500、 100 μm,因此PDMS阀膜长度和宽度设计尺寸分别为1000 μm和500 μm,厚度则设计为100 μm,远小于长度和宽度,因此可将阀膜简化为弹性薄板,阀膜的运动看作是此弹性薄板在多种作用力的合力作用下,沿z轴轴向作整体往复运动。阀膜运动位移量一般为在微米数量级,由于位移量十分微小,因此可将阀膜简化为弹性薄板。
wv为PDMS电磁微阀宽度,lv为PDMS电磁微阀长度,图3中,阀膜沿z轴方向作垂直往复运动,以开启或关闭PDMS电磁微阀阀门。根据电磁微阀的结构及阀芯、阀膜的运动特征,可确定模型运动边界条件,具体设定为:x,y坐标轴在阀腔内壁固定,边界处不存在滑移;z坐标轴在阀腔底面固定,阀腔深度设为h,并满足当边界条件z=0和z=h时,流速沿x方向和y方向均满足u=v=0。
从生产实际出发,结合不同烟梗的加工特性的研究结果,进行了烟梗分组加工工艺方法和工艺流程设计,经过多次试验和测试论证,设计出了合理的烟梗分组加工预处理路线,最终确定了烟梗预处理工艺流程为:定量喂料—浸梗—贮梗,省去了润梗环节,简化了工艺路径,同时可以针对不同的烟梗采用不同的处理条件,从而达到精细化加工的目的。
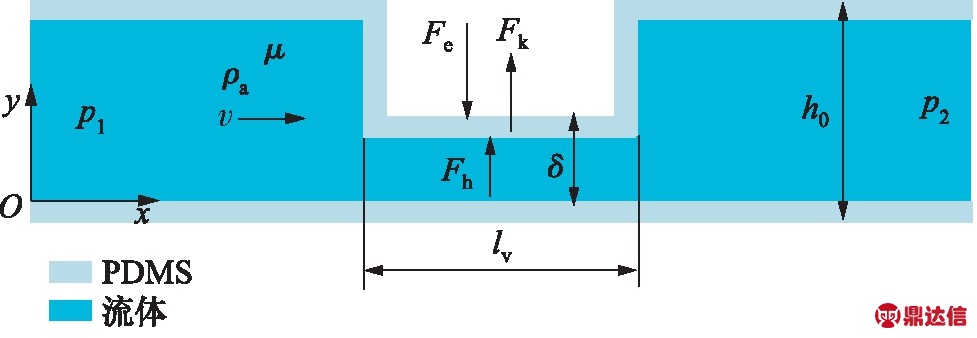
图3 PDMS电磁微阀阀膜受力模型
本研究中仍将工作介质(氮气)视为不可压缩,且不考虑气-固界面的表面张力。对于黏性不可压缩流体而言,简化的纳维-斯托克斯方程和连续性方程[17]如下:

(7)
![]() +
+![]() +
+![]() =0
=0
(8)
式中, u —— 气体流速在x方向的分量,m/s
v —— 气体流速在y方向的分量,m/s
w —— 气体流速在z方向的分量,m/s
pa —— 气体压力,Pa
μ —— 气体动力黏性系数,Pa·s
在GPR测量过程中,由发射天线向外发射一定中心频率的电磁脉冲波,电磁脉冲波不同性质的介质中传播时,遇到介质中电磁性(电阻率、介电率及磁导率)差异分界面会发生反射、透射和折射,由接收天线接收。接收天线所接收的信号经过处理转换成时间序列信号,每一测点上的这种时间序列经处理后即可提取出雷达波在介质中的传播速度,进而确定该介质的介电常数。
式(7)第三项中![]() =0,则表明pa只是x,y,t的函数,pa=pa(x,y,t)。为了获得x方向和y方向流体流速,将式(7)中的前两项方程分别对z进行两次积分,并利用边界条件z=0和z=h时,u=v=0,确定积分产生的未知常数项,最后整理为:
=0,则表明pa只是x,y,t的函数,pa=pa(x,y,t)。为了获得x方向和y方向流体流速,将式(7)中的前两项方程分别对z进行两次积分,并利用边界条件z=0和z=h时,u=v=0,确定积分产生的未知常数项,最后整理为:
(9)
对式(8)进行积分得:

(10)
阀腔内流体高度h=δ(其中δ为阀芯位移)分布均匀,不随x方向与y方向变化,仅为时间t的函数。根据式(10)得:
(11)
在本研究中,压力p在空间域上只是x方向的函数,根据经典摩擦理论[18],对式(11)进行面积积分得流体动力Fhydro:

(12)
根据胡克定律,阀膜变形受力关系为:
取对数生长期K562和KG1a细胞,以1×108/L的密度接种。加入60 μmol/L Rh2-S诱导细胞24 h,收集各组细胞,预冷PBS洗涤2次,按照Annexin V-FIT-C/PI双染细胞检测试剂盒说明书进行操作,用流式细胞仪分析细胞凋亡。实验重复3次。
k2(h0-δ)=-Factu+Fhydro
(13)
本研究中的电磁微阀阀口尺度为微米级别,宏观流体力学的流体连续性方程和纳维-斯托克斯方程仍然适用[19]。气体在低流速情况下通常采用不可压缩模型。将通过PDMS电磁微阀阀口的气体流动过程近似看作理想气体通过收缩喷管的一维等熵流动气体质量流量Q采用Sanville公式[20-21]。
为什么我国青少年近视率居世界第一?复旦大学附属眼耳鼻喉科医院副院长、上海眼视光学研究中心主任周行涛分析认为:“近视成因分为先天因素和环境因素,由先天因素为主导致的高度近视,其患病率较为恒定。而后天环境因素中,生活方式特别是户外活动不足、学业负担过重等引起的近视,这些年来明显增多。”原来户外活动不足、学业负担过重等原因是青少年视力下降的原因,而户外活动不足的原因又是学业负担过重,压得孩子不能去户外活动,也不敢去户外活动。原来学业负担过重是罪魁祸首!
Q=kv1kx1Ap![]() ·
·![]() ·φ(ε)
·φ(ε)
(14)
式中, φ(ε) —— N2流入函数
kv1 —— 阀口流量系数, kv1=0.68
kx1 —— 节流口前后微尺度修正系数, kx1=0.15
ε —— 压力比, ε=p2/p1
Ap —— 雍塞流下的有效面积,Ap=wvδ,m2
Rair —— 气体常数
TS —— 气源温度,K
K —— 绝热指数,双原子气体K=1.41
wv —— 阀口宽度,m
利用MATLAB/Simulink建立阀膜形变、电磁微阀出口流量模块,电磁微阀阀膜形变模型、出口流量模型与前述的5个电磁驱动器系统模块相对应的端口封装并连接,构成电磁微阀动态仿真模型。
4 仿真结果分析
4.1 电磁驱动器动态特性仿真结果
电磁驱动器参数如表1所示,反向电动势、阀芯的驱动力、响应(吸合、断开)时间的仿真分析结果如图4所示。从图中可以看出,电磁驱动器在断电瞬间有动态的反向电动势,最大为24 V,阀芯最大驱动力为0.881 N,电磁驱动器阀芯从0到第一次达到稳态值的吸合时间约为4 ms,从稳态值到第一次到达0值的释放时间约为3.5 ms,在打开或关闭的瞬间,均有约1 ms 因电磁转换而引起的滞后,因此,所选用的电磁驱动器具有良好的动态响应特性和较宽的工作频率,至少可以达到100 Hz。
表1 电磁驱动器仿真参数
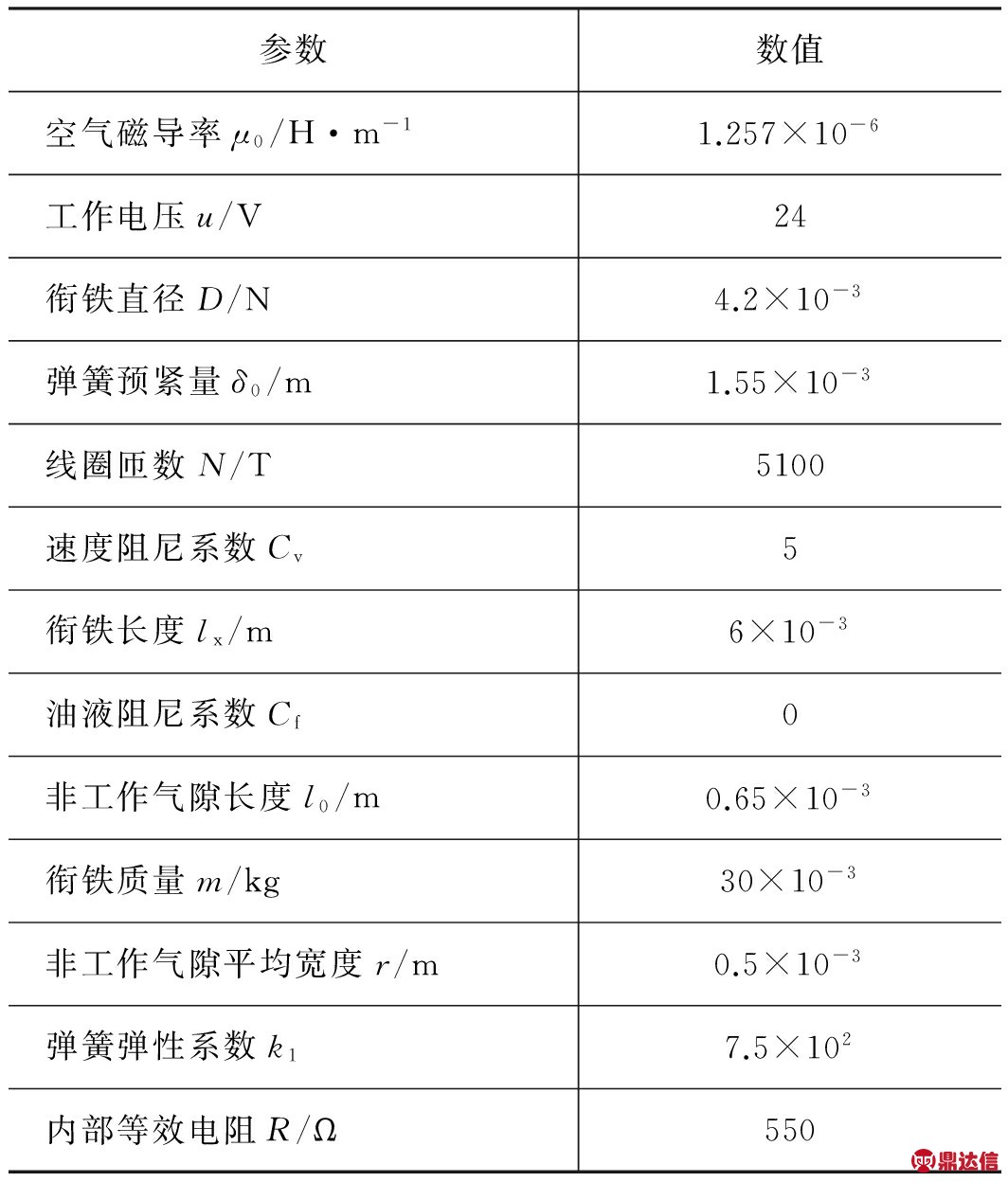
参数数值空气磁导率μ0/H·m-11.257×10-6工作电压u/V24衔铁直径D/N4.2×10-3弹簧预紧量δ0/m1.55×10-3线圈匝数N/T5100速度阻尼系数Cv5衔铁长度lx/m6×10-3油液阻尼系数Cf0非工作气隙长度l0/m0.65×10-3衔铁质量m/kg30×10-3非工作气隙平均宽度r/m0.5×10-3弹簧弹性系数k17.5×102内部等效电阻R/Ω550
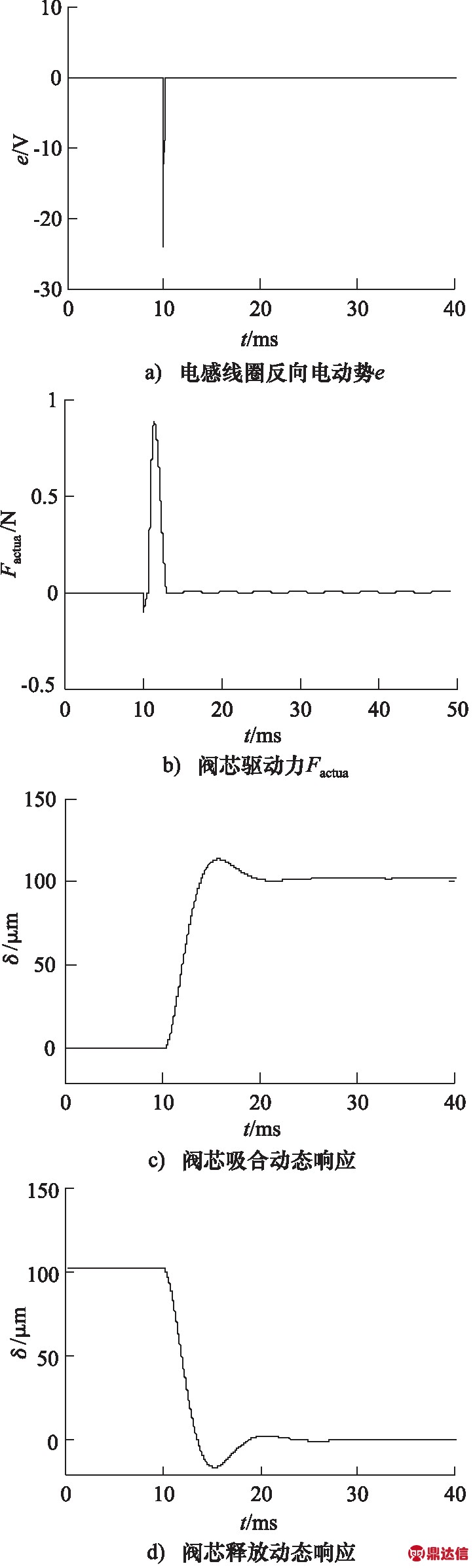
图4 电磁驱动器动态特性仿真结果
4.2 PDMS电磁微阀流量动态特性仿真结果
上述参数不变的情况下(表1),取p1为100 kPa、p2为环境气压,PDMS电磁微阀打开和关闭过程中流量动态特性仿真结果如图5所示。
本文的理论贡献主要在于:(1)对财务冗余的研究细化到现金冗余部分,集中分析现金冗余与研发投入的关系,有利于明确现金冗余在企业创新方面存在的作用,也充实了财务冗余领域的研究。(2)在现金冗余与研发投入关系方面探讨了实施股票期权激励对高管认知和行为的影响,既丰富了冗余资源与企业创新领域有关内部治理因素的研究,也拓宽了激励理论的应用范围。(3)进一步分析了高管在股票期权激励草案公告前和行权等待阶段其通过控制现金冗余用于研发投入的水平进行盈余操纵的行为,延伸了盈余管理相关研究在冗余资源与研发投入领域的应用。
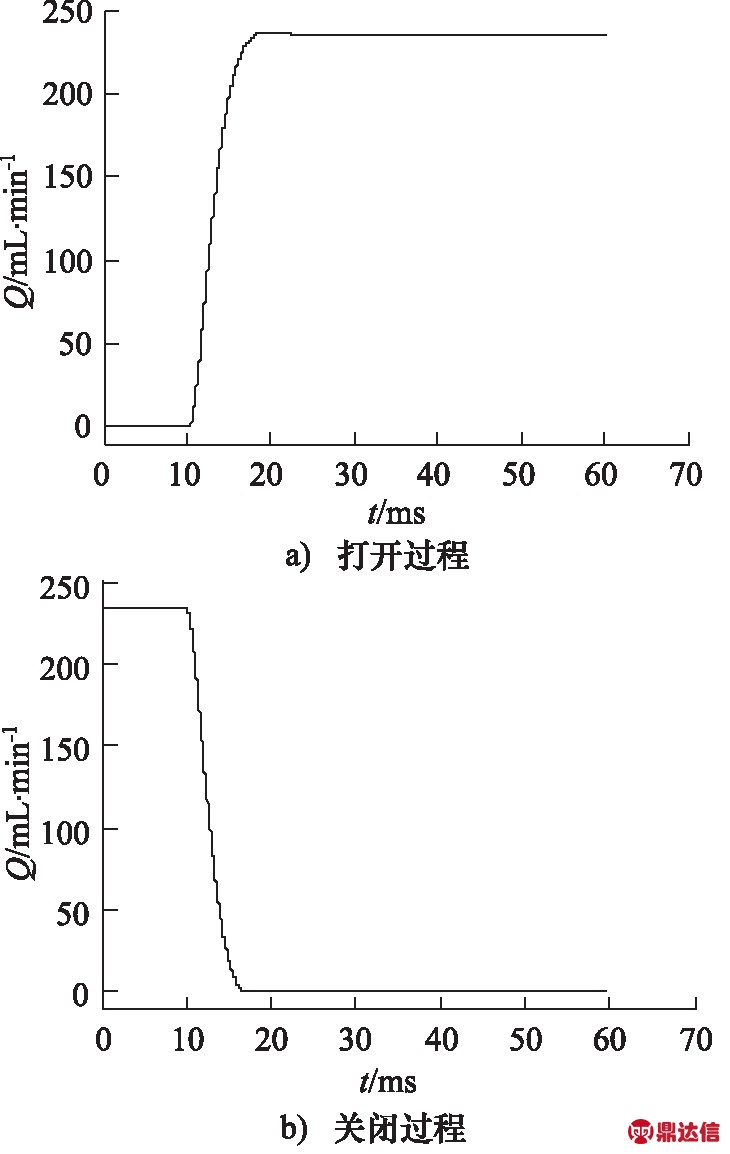
图5 PDMS电磁微阀动态流量特性仿真结果
5 结论
与常规尺寸的传统电磁阀相比,新型电磁微阀具有以下优势:
(1) 阀芯位于阀腔外部,不与工作介质直接接触,消除了阀芯上的液压卡紧力,降低了噪音和阀芯磨损,延长了其使用寿命;
(2) 从结构设计上减少了液动力的影响,提高了其工作稳定性;
(3) 响应时间短,具有良好的动态响应特性,直接影响气动微流控芯片上气动功能部件的动态性能;
(4) 流量稳定性高、功耗低和工作温度范围宽等,且PDMS阀膜能够充当弹垫的作用,泄漏率非常低。
本研究提出了易与气动微流控芯片集成的片外PDMS电磁微阀,给出了电磁驱动器及PDMS阀体结构和PDMS电磁微阀工作原理,并利用MATLAB/Simulink软件对电磁驱动器响应特性和PDMS电磁微阀动态流量特性进行仿真得出,阀芯最大驱动力为0.881 N,PDMS电磁微阀打开时间和关闭时间分别为4 ms和3.5 ms,动态出口流量随阀芯位移的变化而变化。研究结果从理论上验证了新型PDMS电磁微阀能够满足响应时间快和流量稳定性高等性能设计指标,并且该研究对PDMS电磁微阀的进一步研究和应用提供了一定的理论指导。


