
摘要 针对电磁法观测系统在使用过程中的开机自检要求,分析常用测量系统及地球物理仪器的检测信号特征,通过对已有机制进行研究和对比,结合现有信号产生电路的优势,提出一种功耗低、精度高、设计简单的自检信号发生器实现方案. 基于该方案设计了一套实现电路,其以CPLD为核心,由精密参考电压源、模拟开关及运算放大器等器件构成,并对该电路进行仿真与测试. 通过系统稳定性分析,采用波特图与奈奎斯特图表明信号发生电路的稳定性符合设计要求. 经仿真与测试,能够通过换挡开关产生幅值为20 μV~2 V、频率范围在1 Hz~100 kHz的自检脉冲信号,频率稳定在1%,重复测试相位稳定度小于1.5%,幅值误差可以优化到1%以内,且能通过其稳定的谐波分量来获取该系统带宽更宽的通道测试响应. 测试结果表明,该自检信号发生器电路实际功耗小于0.3 W,20 μV~2 V幅值范围和1 Hz~100 kHz频率范围内性能指标的测量结果和仿真结果相符,并成功应用于某监控系统. 利用该信号发生器电路实现自检具有操作方便、成本低、易于设计等优点,能够有效的弥补其它自检模式的缺陷.
关键词 观测系统; 自检信号; 低功耗; CPLD
1 引言
为确保测试功能的完整和稳定,测量系统每次使用前必须开机自检(王瑞,2013).常规测量系统自检一般采用通用信号源或内置的简易电路产生波形信号,其精度有限,如示波器采用内置方波信号产生电路产生的5 V或者3.3 V方波信号进行人工自检(卢燕涛等,2007; Deyst et al., 1998; Paulter and Larson, 2001),高精度的测量系统需要采用高精度的信号发生器,如采用专用矢量信号源产生的信号进行检验或采用DDFS技术及复杂控制系统(Atherton, 2010; Fu et al., 2010),或者采用阶跃信号自检与自校(张秀成,1989).地球物理仪器是一类非常重要的精密测量仪器设备,特别是针对电磁法仪器、地震仪等观测系统,标定和自检是一项重要功能,因此可靠有效的开机自检信号发生器直接决定了开机自检的成败(张爽等,2014).
在国内,电磁法仪器研究一直是热点问题,因此自检及标定信号的产生也受到许多研究者的关注(李建华等,2012; 2015).中南大学何继善院士团队从70年代末开始研制双频激电仪,经与湖南继善高科进行成果转化,目前流行的SQ系列双频激电仪(浦慧如和白宜诚,1994;白宜诚等,2002;何继善,2006;湖南继善高科技有限公司,2017)、伪随机电法仪(陈儒军,2003)、广域电磁仪(蒋奇云,2010;何继善,2010)等,前两者可分别通过发送机发送的标准信号源及接收机内部自带的信号源进行外校正与自检,广域电磁法系统则利用其自主研制的发送机控制IGBT来产生幅值约12 V的伪随机信号(裴婧,2010),结合分压的方式来进行室内环境的一致性测试,同时与Agilent公司的动态信号分析仪35670A进行比对,获得了较好的结果.葛健在多通道电磁法数据采集系统中采用FPGA控制16 bit DAC产生自检信号(葛健,2011),输出同频率同幅度的正弦波进行通道间的一致性与同步性测试.较早的DCX-1有源电磁差分仪采用2 MHz晶振与分频电路及逻辑合成电路产生16 Hz、4 Hz、1 Hz、0.25 Hz等4种可调幅度的自检同步触发信号(吴嘉谷和豆会平,1996),同时产生相应频率的可调幅度自检模拟电磁信号,进行工作状况与某些指标测试.中国科学院地质与地球物理研究所研发的SEP地面电磁探测系统采用FPGA来控制VCOCXO (底青云等,2013),并生成相应的标定信号进行自检与标定.尹炳琪采用STM32F103为控制核心(尹炳琪,2013),基于20bit的DAC设计满足瞬变电磁观测系统测试的e指数信号源.申瑞杰等采用基于FPGA与GPS设计的信号发生器电路作为大地电磁观测系统的标定信号电路(申瑞杰等,2013),产生与GPS同步的5种方波信号用于电磁法仪器的自检与校正.陈凯等采用一个自检盒专门放置自检电路(陈凯等,2015),实现MT观测系统的开机自检与标定.感应式磁传感器对MT等仪器起着决定性作用,吉林大学张爽教授课题组采用信号发生器产生正弦波信号来测试其研制的0.003 Hz~10 kHz感应式磁传感器的特性 (赵靖,2013),并由信号发生电路和反馈线圈组成标定系统,完成系统的标定;该团队在TEM标定系统基础上(张爽等,2014),讨论了一次互感响应与高次互感响应的内在联系以及地面和航空TEM标定系统中高次互感响应对标定的影响规律,为优化TEM标定系统的参数、更准确地评价TEM系统早期信号的畸变程度提供理论指导.吉林大学林君教授团队在电磁法观测系统研制上取得了大量的成果,该团队采用6个固定频率方波及其谐波信号作为混场源电磁法的标定信号(王言章等,2008),具有较高的效率;张文秀等以FPGA为核心设计了多频标定信号产生电路(张文秀, 2012;张文秀等,2012),实现频率为0.04~8192 Hz、幅度误差优于2%标定信号的产生,用于标定与开机自检;刘立超等介绍了一种利用逆重复m序列的仪器标定方法(刘立超等,2014), 并给出了双极性逆重复m序列的信号产生电路,可用于开机自检和标定;祁晶以泰克公司的AFG302XB及ArBExpress软件为基础设计MRS-TEM联用仪室内测试与标定平台,从而降低了测试与设计成本(祁晶,2014);王腾龙利用DDS双通道函数信号发生器EMS32030、泰克公司的示波器TDS1012B-SC、吉林大学研制的瞬变电磁发射机ATEM-II等对其研制的多功能电磁探测接收机进行了性能测试,获得了接收机的动态范围、滤波性能及采集一致性等性能指标(王腾龙,2014).王绪本教授团队提出了基于DDS原理(王鼎鸿,2015;熊静,2016),以SOPC与Labview为处理平台,利用DAC及相关电路产生e指数信号,用于测试瞬变电磁仪及半航空瞬变电磁接收机.邓明教授课题组提出了一种海底电磁接收机陆地测试方法(汪海峰等,2016),选择人文干扰弱的地区,采用凤凰公司专业大地电磁观测仪器MTU5对其课题组新研制的5台海底电磁接收机采集电路进行陆地MT模式下的一致性及重复性对比试验, 可以实现对海洋电磁接收机的性能测试与评估.
在国外, EMI公司于上世纪80年末推出便携式MT-1大地电磁测深系统(李来顺,1993),采用该系统内部的同一个正弦波和余弦波输入到所有的通道中进行测试,通过测试结果对响应与偏差加以校正;随后的Stratagem EH4仪器是一种常用的MT仪器(Geometrics, Inc.,2000),其信号校正需要观测Ey与Hx、Ex与Hy等两组数据的幅度与相位相似度,进而确认仪器是否能正常工作,然后进行并联传感器测试,利用谱相关系数判定观测系统的正常与否.美国Zonge工程公司的第4代可控源和天然场源电法和电磁法探测多通道接收机GDP-32Ⅱ(Zonge International Inc.,2002)及后续的ZEN多功能电磁系统(耿启立,2016;Zonge International INC,2017),采用母板MPU控制16 bit DAC产生-2.5 V~ +2.5 V范围的直流校正电压信号,同时结合自带欧姆计进行自检.德国Metronix公司推出以大地电磁测深为主的GMS-05、GMS-06后,又推出以ADU-07为主机的多功能综合电磁法系统(Metronix Geophysics Inc.,2017;北京欧华联科技有限责任公司,2011),并成为主流电磁法观测系统,ADU-07具有专门的标定与自检模块,产生高精度、高稳定性的双极对称的±2.5 V矩形信号,可衰减至1/8,且其时钟与ADC的采样时钟同步,频率范围为0.125~16384 Hz.加拿大凤凰公司于上世纪80年代中期, 推出了以可控源音频大地电磁测深为主的V-4系统(PHOENIX Geophysics Limited,2017), 随后又相继推出V5-2000、 V-6及V-8系统,其系统标定采用仪器系统内部的标定电路及专用白噪声盒子产生的波形信号及白噪声进行自检与标定.
地震仪和电磁法观测系统一样,也属于非常重要的地球物理仪器,自检及标定极为重要.地震仪具有热噪声与其他干扰噪声(Byrne,1961),1970年White结合Willmore桥电路与置换法来校准地震仪(White,1970),并给出了改进方案.在相对标定领域,Berger 等人提出采用随机二进制信号进行地震仪的自检与校准,精度优于1%(Berger et al., 1979).Duennebier等人采用商业信号发生器、白噪声发生器或磁带输出组成地震仪的自校准电路系统(Duennebier et al.,1984).Sauter与 Dorman提出利用一个已知宽度的方波序列对海底地震仪进行标定,在0.1~32 Hz范围内有较高的精度(Sauter and Dorman,1986).国内80年代初就开始了地震仪的标定研究,倪学诗提出了采用模拟器件搭建的振荡器电路产生正弦波,进行地震仪的标定(倪学诗,1982).DD-1等地震仪使用模拟信号发生器产生正弦波作为标定信号(徐扬和郝恩元,1983),标定过程比较复杂.周云耀提出由计算机控制DAC产生正弦波来进行地震仪的频域标定与开机自检(周云耀,2004a,2004b).为满足中国地震局地球物理研究所研制的BKD-2A型便携式宽频带地震计的测试要求,王晓美等以单片机为核心控制信号发生器驱动BKD-2A的三分量标定线圈(王晓美等,2005),达到测试要求的同时简化了工作流程并缩短了工作时间.李淑清等利用DDS芯片AD9833与MSP430单片机实现地震检波器测试仪信号源的设计(李淑清等,2015).绝对标定时,需对地震仪进行自由落体或振动台作为运动激励(Canuteson et al., 1997; Wielandt, 2002;Havskov and Alguacil,2005;He et al., 2014;苏文和陈祖斌,2014).张晓鹏等人采用NE555及运放设计了阶跃加速激励进行负电阻反馈式地震仪标定(张晓鹏等,2016),相对误差达到了5%以内.
上述电磁法观测系统及地震仪的自检与标定信号发生器各有千秋,软硬件设计基于特定的仪器系统进行设计的.针对自主研发的地球物理仪器,特别是针对自主的电磁法观测系统,信号的分辨率在亚微伏级,采用通用信号源设备或者模拟器件搭建的常规电路已经不能满足小体积、低功耗、便携性的要求,同时维护较为麻烦、成本较高,因此结合已有或较为成熟的自检与标定信号产生电路,本文针对电磁法观测系统提出一种满足开机自检的通用高质量信号发生器,可采用CPLD进行编码或频率设定,组成不同的频率与码流输出,在完成仪器开机自检的基础上为下一步的标定做基础.
2 自检原理
电磁法观测系统在自检时需要精度高、频率准确的信号,且电磁传感器通道的相位一致性要求高,因此采用同一信号,对多个通道进行自检.
在系统中,设系统频率响应模型为h(t),待测输入信号为f(t),输出信号为y(t),则在频率域有(Cerna and Harvey, 1993):
H(jω)=![]() ,
,
(1)
若把自检信号分成不同的频段,则可以根据不同的频段得到不同的频率域响应H(jω),由该模型参数可用于校准测量系统,变换式(1)经过频域反变换获取实际使用时采集的真实信号f(t),实现自检功能.
为得到精确的频率和相位,设f(t)为自检信号函数,含有丰富谐波频率的方波信号,则有(王彪和姬虹,2011):
f(t)=AΓ(ωt+φ)+n(t),
(2)
其中A为测量系统自检信号幅度值,Γ为方波产生函数,ω为信号角频率,φ为初始相位,n(t)表示噪声.
式(2)中,参数A、ω、φ、n(t)是自检信号的关键,参数A的精确度决定了自检信号是否能真实反映电磁法观测系统开机后的系统性能,参数ω则真实的反映了电磁法观测系统本身对该频率的响应,参数φ表明各个测试通道是否真正同步,n(t)则代表了自检信号产生过程中带来的噪声,该噪声的大小直接决定了自检信号的好坏与自检可重复度.因此要满足式(2)提出的各种要求,频率源输出必须要稳定,信号产生幅值精确,而且自检信号产生通道噪声小.这就要求选用尽量少的器件满足自检系统设计,在保证自检信号各个参数达标的基础上使其引入的噪声尽量小.
在电磁法观测系统中,如图1所示,以中心处理平台为控制中心,设计一个自检信号发生模块,在电磁传感器通道之前各采用一个低噪声的模拟开关来选择不同的输入信号(自检信号和传感器信号).该模块主要包含自检电源、信号控制、自检信号产生和自检信号调理等功能.该模块主要完成精度高、频率准的自检信号输入.
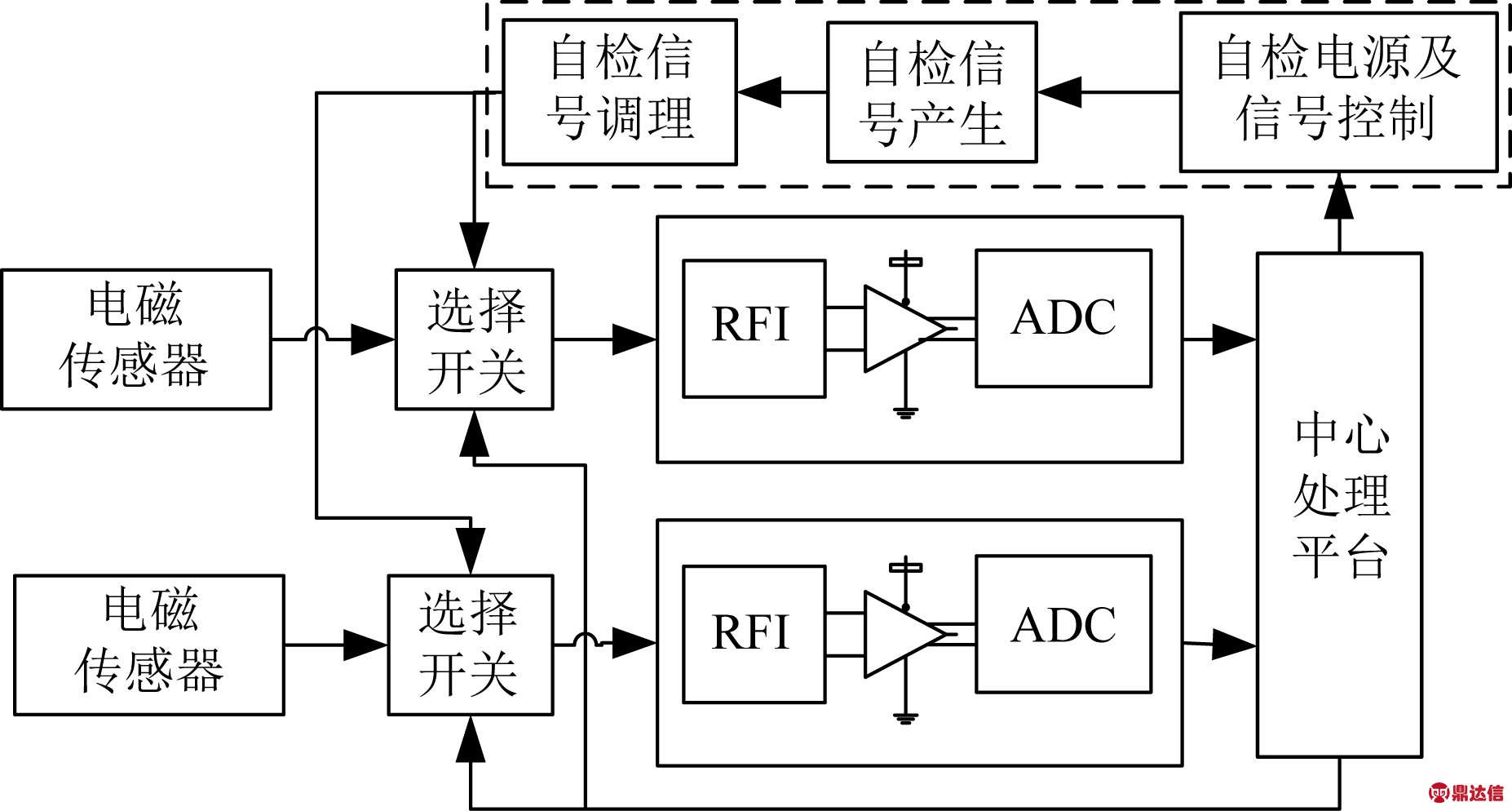
图1 电磁法观测系统自检原理(以两通道为例)
Fig.1 Self-test principle of electromagnetic prospecting systems(2 channels for example)
该自检信号电压峰值范围从伏级到毫伏级,甚至微伏级,精确度高.频率一般在Hz级到上百kHz,跨度大,易获取宽频范围的传递函数响应,同时还可以采用谐波实现更多频点测量.
3 自检模型
图2为自检模型,主要由高精度电压参考电路、单刀双掷开关电路、精密电阻衰减选择电路、低噪声运放信号调理电路、中心处理平台中的CPLD与GPS构成.
当需要自检时,关断传感器信号输入而选择自检信号输入,即经过精密电阻衰减选择电路后的信号输入到电磁法观测系统中.其中,CPLD的主要功能如下:控制电源开关为整个自检模块供电;接收GPS信号,获取精确的同步信息;产生时钟信号.经过电源转换的电压输入到高精度电压参考电路中,得到稳定的低噪声与低温漂恒定电压,单刀双掷开关一端接地,一端接电压参考电路的输出信号,由CPLD控制单刀双掷开关,即可产生所需频率的方波信号,通过CPLD控制精密衰减电路的衰减与低噪声运放信号调理后,使得方波信号成为精度高、频率准的自检信号,且该信号源输出电阻小,可产生稳定的自检信号.
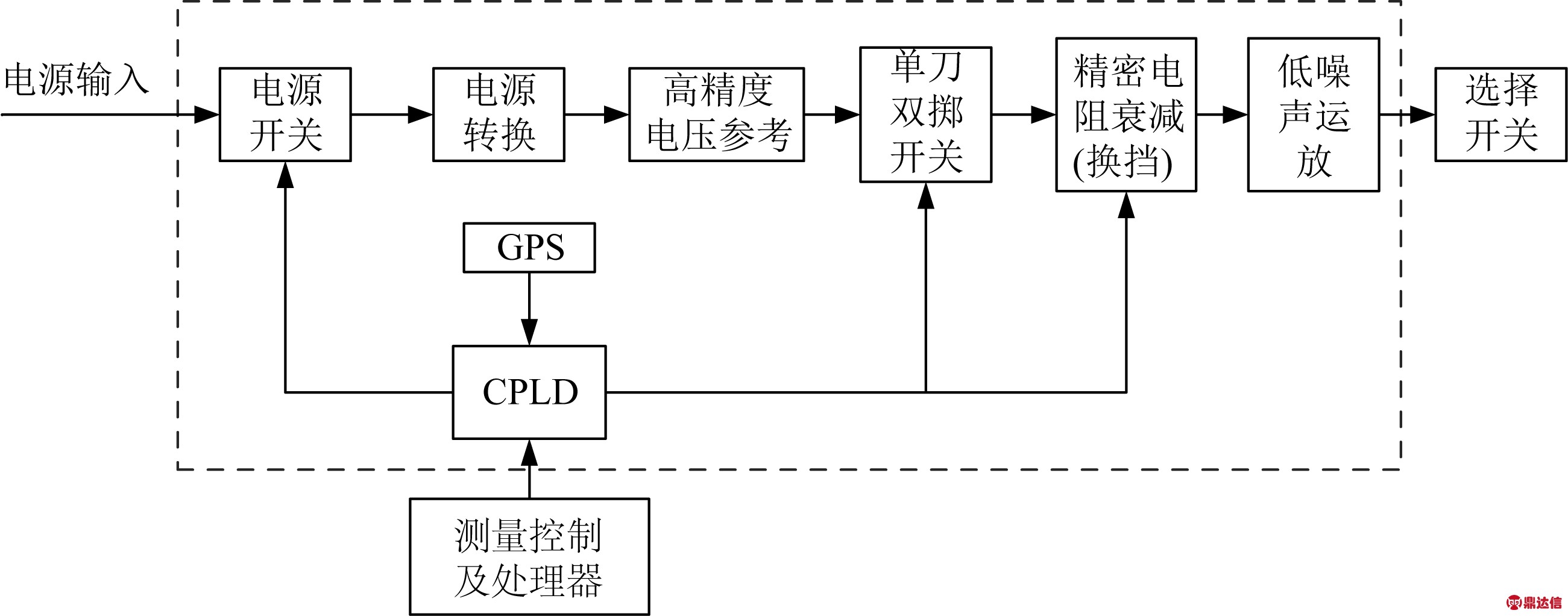
图2 电磁法观测系统自检模型
Fig.2 Self-test model of electromagnetic prospecting systems
为使自检信号频率精准和每次产生的自检信号相位精确一致,由GPS产生的PPS信号和根据GPS输出波形得到10 MHz稳定时钟信号非常关键.采用PPS信号的上升沿来对10 MHz的时钟信号进行触发分频,可以得到相位一致、频率精确的信号源.
在图2中,自检信号幅值A由高精度电压参考提供,因此选用何种指标的电压参考将会直接影响幅值A的参数指标,由GPS提供的时钟信号保证所需频率ω的参数指标,由CPLD保证相位一致性对应的相位φ的参数指标,自检信号产生的系统噪声n(t)将会由高精度电压参考、单刀双掷开关、精密电阻衰减(换挡)、低噪声运放与选择开关等模块的噪声决定.在设计过程中,高精密电压参考、精密电阻衰减等模块的噪声若在允许范围内可以忽略,因此,主要考虑开关噪声和运放噪声,选择运放时要注意运放的电压噪声参数要尽量小,单刀双掷开关和选择开关要选择寄生电容小、导通电阻一致性好的芯片,在PCB设计的时候要注意减少寄生电容和电感的出现,从而降低高频谐波衰减.
4 电路实现和参数分析
根据图2可采用不同的器件进行设计,所选器件构成的电路图如图3所示.省掉电源开关和电源转换等常规设计后,选择精密、微功耗、基准电压芯片ADR5040作为高精密电压参考,利用该芯片产生一个2.048 V的电压参考,然后接入单刀双掷开关ADG819的S1脚,且S2脚接地,其控制管脚接入中心处理平台CPLD,控制管脚输入信号频率为1~100000 Hz占空比为50%的方波信号,使得单刀双掷开关输出信号频率与控制管脚输入频率一样,而输出峰值为2.048 V(Analog Devices, Inc., 2015a, 2015b).R2与R1电阻阵列构成电压衰减电路,通过模拟开关ADG1604组成的衰减阵列选择合适的R1值构成需要的衰减系数,即R1/(R1+R2),R2与R1阵列的值可根据实际需要选择.信号经过R1阵列与R2构成的衰减电路衰减后,送入低噪声运放ADA4898-1组成的放大缓冲器中,此处通过R3和R4的值来设定其放大倍数,电容C用来做带外滤波,滤除不需要的高频信号(Analog Devices, Inc., 2015c, 2015d).最后信号输入至由ADG819组成的自检与信号选择开关中,用来选择正常测量还是自检.
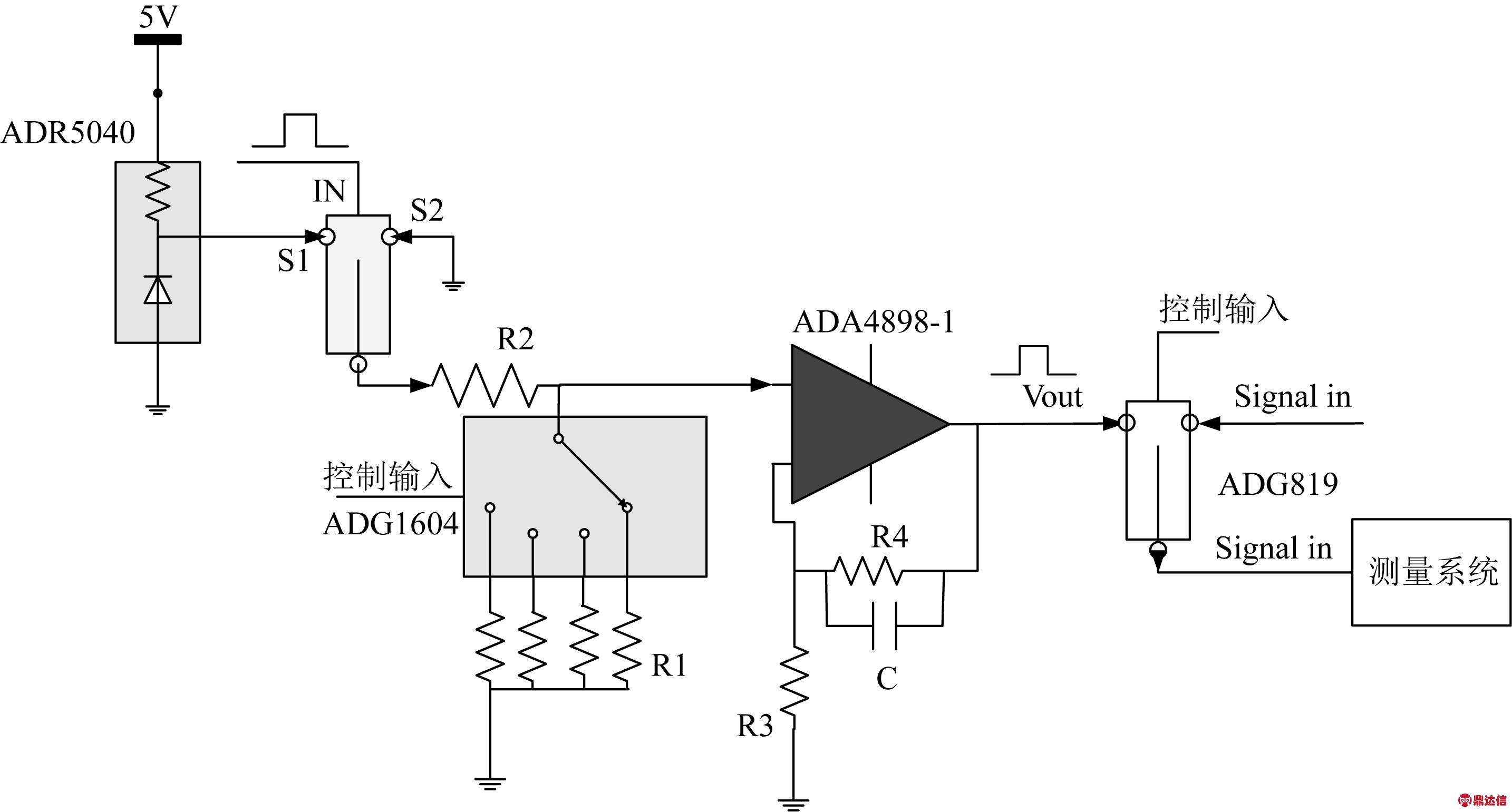
图3 仿真与实验电路
Fig.3 The circuit of simulation and experiment
为了保证相位的一致性,采用授时原理,先将10 MHz信号准备好,当下一个PPS信号到来时利用该信号的上升沿触发10 MHz时钟信号进行分频,同时开启所有的开关信号,开始数据采集,这样每次信号被采集的相位误差将会是PPS的误差与10 MHz时钟信号抖动误差之和,因此保证了自检信号相位的一致性,也保证了自检信号频率的稳定性.
参数如图3,自检信号产生的传递函数公式如下:

(3)
式中C、R1、R2、R3和R4如图3所示,在实际电路中,C为滤波电容,R1、R2分别为分压电阻,此处根据其缩减倍数1、0.01、0.001、0.0001和0.00001选择对应的R1/(R1+R2),为兼顾电阻噪声和精度R2选择99 kΩ,则ADG1604在缩减倍数为1时断开,缩减倍数为0.01时ADG1604选择R1阵列中的1000 Ω、0.001时ADG1604选择R1阵列中的100 Ω、0.0001时ADG1604选择R1阵列中的10 Ω、0.00001时ADG1604选择R1阵列中的1 Ω,误差部分可以在后期数据处理中进行系数补偿即可.R3和R4为运放的反馈电阻,可以根据需要进行放大设置,此处R3断开,R4取值10 Ω.电容C可以由RC电路取值进行滤波设计,此处取1 nF.由图3可知,信号发生电路全功率带宽设计为0~100 kHz,可满足绝大多数电磁法观测系统使用.输出幅值为2 V、0.02 V、0.002 V、0.0002 V及0.00002 V,由于电阻值固定,因此会有一定的偏差,但该偏差固定且可以用系数补偿.整体噪声谱需要小于10-13 V2/Hz,以保证自检及标定的准确性.
式(3)中电阻参数不会转移电路的相位与频率特性,除去该系统的稳定部分,可以简化为
Gsh1(s)=![]() ,
,
(4)
式中x为R4C的简化值,式中x取值范围约在10-6~10-3,可根据需要输出的频率调整该参数,一般取10-5.进行Bode和Nyquist分析,得出图4和图5.
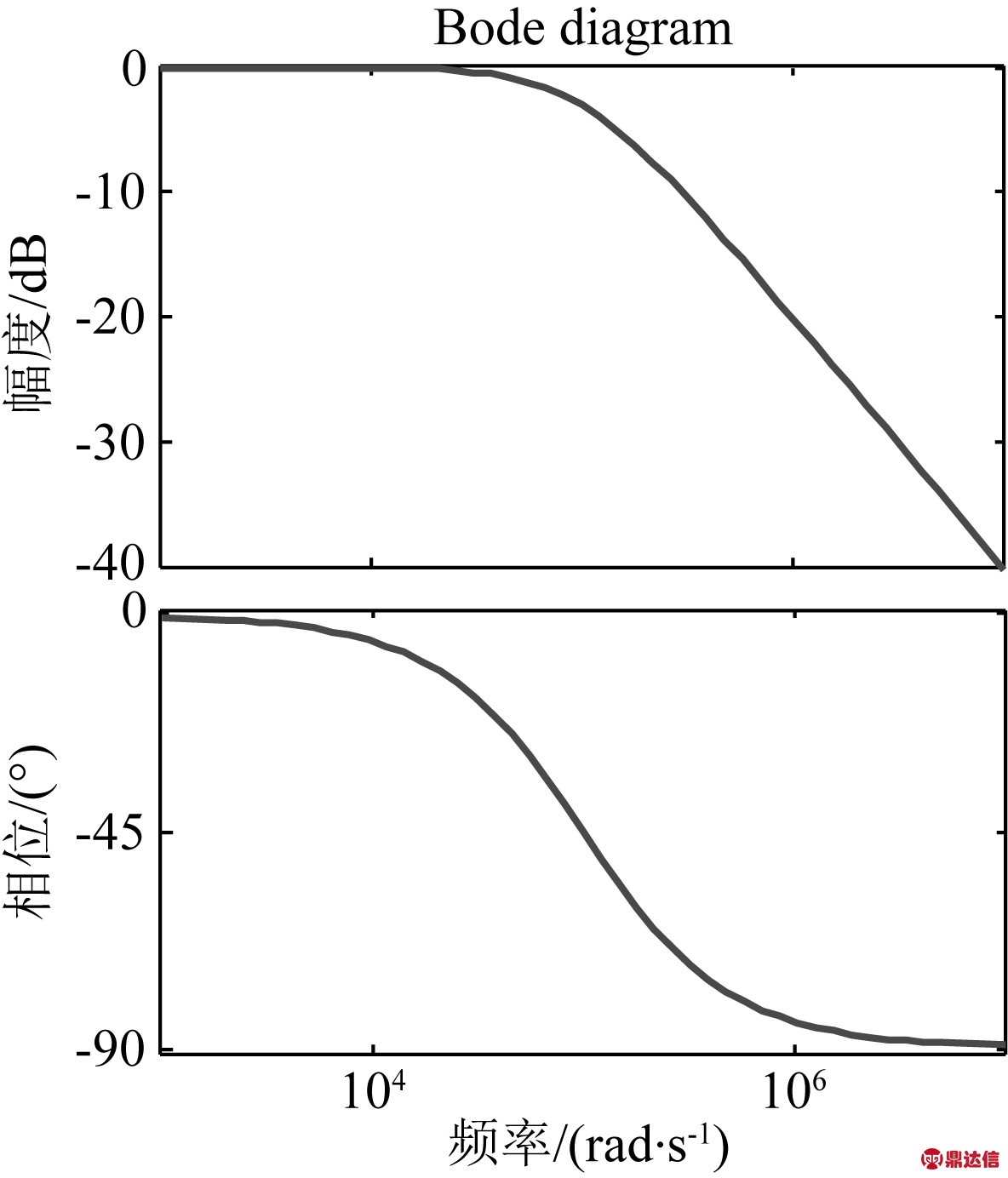
图4 电路的幅相波特图
Fig.4 The Bode diagram
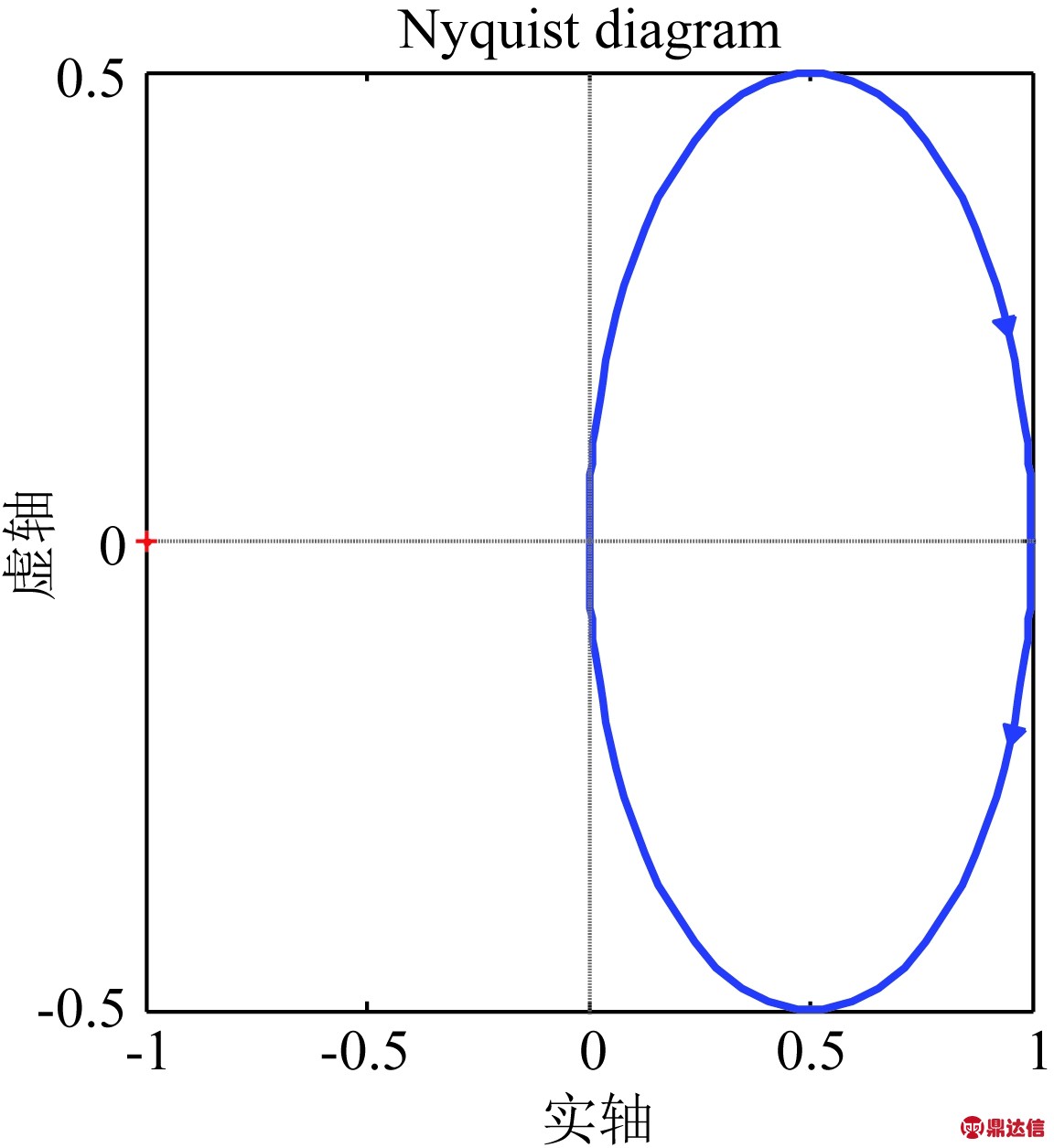
图5 电路的Nyquist图
Fig.5 The Nyquist diagram
如图4所示,在增益值为-10 dB以上时,其相位转移特性一直小于90°,即该电路相位延迟不会超过90°,即系统稳定.从图5中系统稳定的判定条件来看,从两个角度而言该电路都满足系统稳定的条件,因此,该电路在0~100000 Hz之间是极其稳定的.

图6 自检电路噪声谱图
Fig.6 The noise spectrum of the self-test circuit
如图6所示,该自检方案的噪声谱图,在小于10 kHz时,噪声谱为10-14至10-13 V2/Hz,在10 kHz至1 MHz区间时,噪声谱小于10-14 V2/Hz,总体而言,该自检方案的噪声谱曲线较小,与测试过的信号发生器相比,从噪声谱上而言,信号质量较优.
仿真与实验选择的频率分别为1 Hz、10 Hz、1000 Hz、10000 Hz、50000 Hz和100000 Hz等,衰减倍数选择1、0.01、0.001、0.0001和0.00001等.如图7所示,在仿真获得的频率为100000 Hz的基础上,图(a)、(b)分别对应衰减系数为1和0.00001时的波形图,该电路主要考虑频率较高时的带宽问题,因此保证100000 Hz能够正常运行,则能保证电路整个带宽范围功能和性能正常.由仿真图可知,频率和相位完全一致,幅度在1.5%左右,满足自检测试要求.从图中可以看出,方波波形完整,上升沿和下降沿陡峭,没有过冲和谐振,可以利用谐波进行测试.
表1是在不同的时间,利用示波器、频率计、高精度数字毫伏表、24 bit采集仪器等测试的10次频率、相位偏差值、幅度值的平均值.由表1可知,除了衰减系数为0.00001时误差较大外,其余衰减系数的响应参数都满足响应要求.由于电阻本身误差、电路内部噪声与外部耦合噪声等原因,导致衰减系数为0.00001时自检信号幅值为20 μV左右.参数误差稍大,实际工作时可利用偶数周期测量求取平均值,再把该平均值作为有效真值,自检时采用该有效真值可有效检测电磁脉冲测量系统的电路响应.在相位上,对多套自检信号产生电路进行比较并平均后相位误差时间都在150 ns内,即当频率为100000 Hz时相位稳定度最差,为1.5%.虽频率计本身有误差,但根据表1中测试频率值和利用时钟源GPS的波形转换得到10 MHz信号特性,可知自检信号的频率稳定度误差肯定在1%以内.经开关自检模块测试,增加功耗小于0.3 W,即该自检电路的功耗为0.3 W以内.
由表1可知,实验结果的各项指标要优于普通信号发生器,特别是小信号,很多信号发生器不具备该功能.和高精度信号源相比,频率稳定度和相位一致性指标较高.
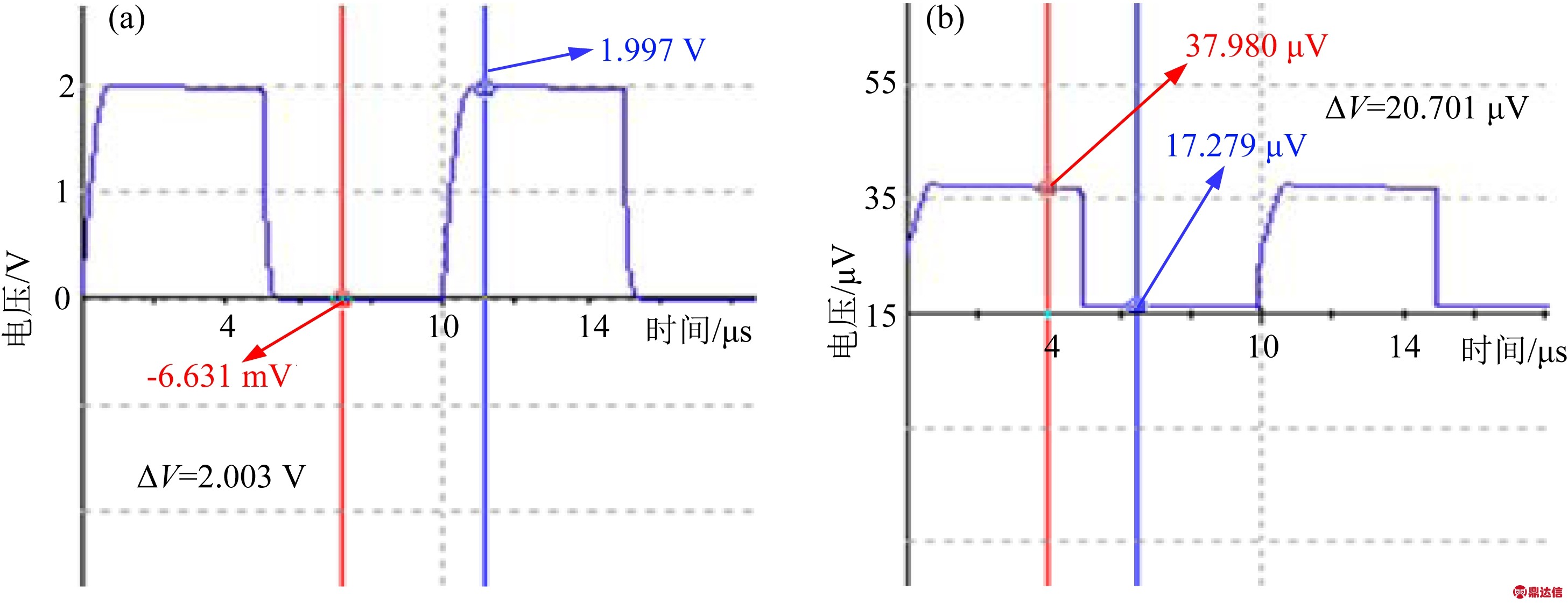
图7 100000 Hz的仿真结果
(a) 衰减系数为1; (b) 衰减系数为0.00001.
Fig.7 Simulation results of 100000 Hz
(a) Attenuation coefficient=1; (b) Attenuation coefficient=0.00001.
表1 自检测试结果
Table 1 Test results

得到的高性能、低功耗自检电路,其频率范围为1~100000 Hz,幅度范围为20 μV~2 V,重复测量频率稳定度、相位一致性、幅度稳定性等都在1.5%以内,明显优于一般自检信号源,相比高精度信号源很多性能指标也有所超越,满足电磁法观测系统的自检,为观测系统的幅相标定奠定基础.
采用CPLD的低延迟使得该自检信号与GPS或北斗的PPS同步.在满足幅相要求的基础上,可以根据实际需要设置成单频点输出、多个频率进行扫频输出、m序列与逆m序列输出等功能,同时还可以根据不同的仪器要求进行幅度调节.相对于国外V8、GDP-32及国内同类仪器的开机自检信号发生器电路,采用的信号产生器电路更为简洁、功耗更低、可靠性更高、输出频率范围及幅度更宽,成本也更低,可以作为一个电路模块安装于某个观测系统内部也可以将该模块进行整体设计如观测系统中,便于进一步进行开发.
5 结论
本文讨论了已有常规电磁法观测系统及地震仪的开机自检、标定的技术和方法,根据电磁法观测系统的原理,结合现有观测系统自检与标定信号产生电路的优势,提出并建立了能够用于电磁法观测系统自检的信号产生与自检模型.根据该模型选择合适的高精度电压参考、模拟开关及低噪声运算放大器组成自检信号产生电路.对该电路进行了理论分析与仿真,并利用GPS与CPLD组成时钟与相位保持电路,得到能够用于电磁法观测系统的高性能、低功耗自检电路,其频率范围为1~100000 Hz,幅度范围为20 μV~2 V,重复测量频率稳定度、相位一致性、幅度稳定性等都在1.5%以内.该电路已经成功用于某研究所监控系统实时自检,在工程中,可以利用差分模式进一步提升该自检模型的抗干扰和降噪能力,可进一步进行伪随机编码、频率控制等功能实现,从而广泛用于地球物理仪器中及一些光电跟踪系统中.


