
【摘要】近年来,随着科学技术水平的不断提高,智能机器人技术发展迅速,智能循迹小车逐步被运用到社会的多个领域。而智能循迹小车研发的核心在于运动控制和功能设计两方面。本文综合运用多传感信息融合技术基于这两方面展开研究。本文根据多传感器小车的功能,给出了各模块的设计方案及工作原理,阐述了硬件设计和软件设计实现方法。实验结果表明,本文设计的基于光电传感器的三轮小车性能良好,在低速时稳定性高,符合系统的设计要求。
【关键词】多传感器小车;自主循迹;运动控制;功能设计
1 引言
随着人类对人工智能、自动化、信息化等学科的不断完善,作为多学科融合领域的智能车技术也在蓬勃发展。由于智能车的应用前景十分广阔,在不久的将来智能车行业必定迎来它的繁荣期,因此加快对智能车的研究显得尤为必要。在过去的几十年中,国内外专家和学者都在积极开展有关智能车循迹的研究工作,也出现了大量的成果。但这些研究中存在的主要缺点是大多数技术都是在特定的数学模型与环境中完成,并没有形成一套关于智能车识别的完整理论,很多设备成本高、体积大,不具有实用性。在满足低成本,小体积的前提下,选择合适的硬件系统,并设计出满足系统性能要求的算法软件,成为智能车自主循迹设计的研究趋势。
本文采用多传感信息融合技术,并通过c语言编程系统和三维模拟技术相结合,设计了一种基于光电传感器的三轮小车,具有良好的自主循迹功能和较好的实用性,有着广阔的应用前景。
2 系统总体设计
本系统由改装的模型小车、红外遥控模块和红外控制端三部分组成。其中模型小车是执行机构,该小车采用的核心硬件平台是美国STC公司的STC89C516微控制器,便捷的操作、强大的内核、充足的存储单元使得它非常适用于智能小车的设计与实现。主要功能是接受控制指令,完成信息数据与控制策略的处理,执行小车行驶指令并发送运动状态数据;红外界面控制端主要用于发送控制指令,实现基于光电传感器的自主控制;红外控制模块是红外控制端与循迹小车的通讯桥梁,负责传送停止、启动等用户指令。本文之所以选用红外遥控,在于其编解码更加便捷,成本较低,信号在传播过程中抗干扰能力强。具体工作流程为:通过红外遥控控制端发送指令,经红外接收模块传递至单片机控制小车动作,让其按照指定轨迹自主循迹或者红外遥控行驶。在小自主循迹时,通过光电传感模块探测并传回前方道路信息,经STC89C516微控制器处理,结合PID调速及模糊控制算法,实现小车的自主循迹。
本智能小车控制系统是一个软硬件密切结合的嵌入式系统,硬件部分包括以下几个模块:中央控制模块(STC89C516微处理器)、红外遥控模块、循迹模块、速度检测模块、电机驱动模块以及电源模块,系统的整体框图如图1所示:
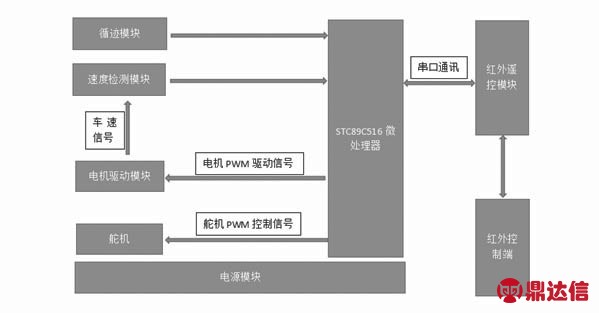
图1 系统整体框图
循迹模块负责采集前方路径的信息,返回一定的电压值并存储在单片机的内存中。速度检测模块负责为电机提供实时准确的速度反馈,将速度信号传递给单片机。中央控制模块负责对循迹模块返回的电压值进行AD转换,最后计算出小车相对于黑线的位移量,并输出舵机PWM控制信号至舵机控制模块,实现小车根据当前路况进行的角度调整。同时中央控制模块根据速度检测模块传递的速度信号采用模糊控制算法计算出小车接下来的速度调整,并输出电机PWM控制信号电机驱动模块,实现小车按照预定的速度进行循迹。红外遥控模块可以满足用户对小车的精确操控,也可以发出指令,让小车自主循迹。电源管理模块负责调解电源电压,适应于各模块所需电压,保证各模块正常工作,是小车的“心脏”。
3 系统硬件设计
本文采用的主控制器是美国STC公司推出的STC89C516单片机,STC89C516在内核方面采用的是经典的51内核,具有便捷的操作、强大的内核和充足的存储单元,支持在线编程存储。贴片封装,拥有四组IO口,INTO,INT1,TO,T1中端口,采用12M晶振。内部存储器128KB Flash,8KB RAM,2KB EEPROM;外围设备:2个增强型串行通讯接口SCI,2个串行外设接口,2个MSCAN模块,能够实现高低速CAN网络的网关节点功能;2个8通道10位A/D,实现外部出发转换功能;8通道16位增强型捕捉定时器ECT;8通道8位PWM,可编程周期及占空比,并且各通道相互独立控制,这些丰富的内部资源及外部的接口满足了MCU对各种数据的处理、CAN网络数据的接收和发送要求。
智能小车采用的是蓄电池放电,充放电次数有限,为了延长电池的使用寿命,提高使用效率,电源管理模块采用LM2940稳压芯片来输出稳定5V电压。LM2940是一种低压差稳定芯片,最低压降为0.8V,且输入输出的压差越小效率越高。共采用三片稳压芯片,分别供应微控制器STC89C516、光电传感器识别电路,测速电路和红外通讯模块。
单片机与红外控制端之间的通讯采用红外通讯来实现。通过红外控制端发射红外遥控信号,也就是一连串的二进制脉冲码,为了避免干扰,先将其调制在特定的载波频率上,小车上的红外接收装置滤除其他杂波只接受该特定频率的信号并将其还原成二进制脉冲码。根据这种原理,事先根据特定的红外传输协议,设定红外控制端按键与小车行为的一一对应,实现对小车的实时控制。
小车的自主循迹依赖于红外光电传感器。红外光管发出红外光,落在地面反射后被红外接收管接收。在黑白道路中,当发射管发出的红外光遇到黑色路径时,大部分红外光被吸收,接收管接收到极少的红外光,电流变得很小;若遇到白色背景时,大部分红外光被反射至接收管,导致接收管电流增大。通过对于接收管电流或者电压的大小来识别光电传感器检测到的路径信息,由此判断出小车的接下来行驶方向,实现自主循迹。
本小车采用的电机型号为RX201815,配合使用专用直流电机H桥式驱动芯片MC33885,采用PWM脉冲宽度调制方法实现对小车速度的控制。这种控制实现简单,调速性能优良、范围广,调整平滑且过载能力大。
为了实现小车的转向功能,本系统采用的舵机为E3003,通过PWM信号控制,即脉冲宽度调制信号,可用编程来控制信号波形的占空比、周期及相位,广泛用于电机驱动、A/D数模转换等场合。舵机的PWM信号周期为20ms,脉宽范围为0.5ms-2.5ms,0-180°行程,呈线性变化。给舵机连续一个脉宽信号,它的舵盘输出轴角度就会保持在一个固定的对应位置上,除非提供另宽度的脉冲信号,才会改变输出轴角度到新的位置。MCU通过循迹模块传回的道路信号,给舵机输出PWM控制信号,来控制小车前进方向。
4 系统软件设计
小车在行驶过程中,单片机系统需要根据所接受路径识别系统采集的信号,测速传感器的信号,采用某种路径搜索算法进行循迹,进而控制直流驱动电机和舵机进行相应的驱动工作。这种算法设计选用C语言编程,智能车控制系统的软件采用模块化的设计方法,方便后续调试。
4.1 舵机控制算法
在计算出前轮的转角后,由PWM波产生模块计算出相应的PWM波的占空比,调制出PWM脉冲波来改变舵机前轮转角,程序框图见图2。
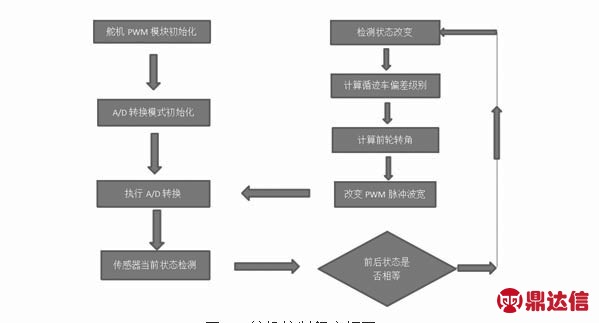
图2 舵机控制程序框图
4.2 速度控制及PID调速算法
对速度的调节主要根据对引导线的偏差和改变前轮的转角。碰到弯道时,小车传感器传回偏差增大的信号,单片机控制舵机调节循迹车前轮转角,同时减少加在直流电动机PWM上的占空比,使循迹车减速,当前轮转角调到一定位置使得偏差减少时,PWM占空比又增加,循迹车又重新加速。由于在弯道上曲率不断变化,偏差也会不断产生,而直道上可以保持偏差为零的状态。控制系统对偏差为零的状态进行计数,计数到给定值时,速度提高一级,后再重新计数,从而使小车完成“循迹”。
PWM调速是通过保持脉冲频率不变,改变输出导通和关断时间的比例,从而改变直流电机两端的电压。在软件上通过将模拟的PID调节器离散化。离散后PID调节器的差分方程为:
偏差值![]() 量化了小车车在行驶过程偏离引导线的程度
量化了小车车在行驶过程偏离引导线的程度![]() 的符号代表了小车偏转的方向,量化后的
的符号代表了小车偏转的方向,量化后的![]() 满足:
满足:
当小车沿引导线行驶时![]() 等于零,右偏时为负,左偏时为正。
等于零,右偏时为负,左偏时为正。
5 实验及结果
为了检验算法的效果,在实验用黑白车道上进行实验,测试结果如图3所示。图中(a)是智能小车红外循迹;图中(b)是智能小车避开障碍物演示。
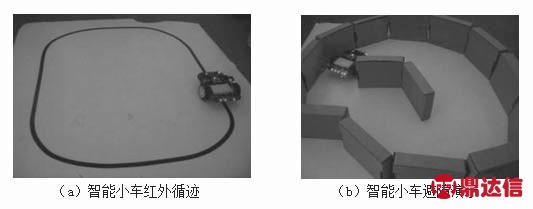
经过实验测试,小车可实现自主循迹,速度达到40cm/s,并且在转弯时,由于独特的设计,小车也不会发生明显减速。
6 结论
本文设计的以PCB电路板兼做车体的三轮小车,以STC89C516为核心,模拟了小车的循迹过程,达到了预期的效果。主要有以下几个优点:硬件充分利用了单片机内部的PWM模块、A/D转换模块,简化了外围电路的设计,车体布局结构合理,便于批量生产;光电传感器的布局新颖,信息利用率高;利用软件有效去除干扰信号,离散PID调节,提高了小车的循迹的流畅性。


