
摘 要:针对在大型构件吊装过程中会出现像碰撞、吊装错位、违规操作、管理不规范等问题,提出了一种基于DSPIC30微控制器的光电传感器设计。在该设计中,以DSPIC30为主控芯片,以nRF24L01作为无线传输模块,可以实现对待测量物体进行精准的定位,定位误差可达到0.2 mm的测量精度,从而保证了对测量物体的精准操作,避免了因碰撞或违规等不准确操作给操作人员及施工人员带来的人生安全性问题。在较大程度上减少了人力和物力的损失,该设计对未来大型构建吊装的精准位置起到有效作用,并具有广泛的应用前景。
关键词:光电传感器;DSPIC30;nRF24L01;构件吊装
随着大型构件吊装在雷达、飞机配件、发电设备等当中的应用广泛。整体吊装、综合整体吊装以及散件吊装被称为大型构件与设备吊装技术[1]。在吊装过程中,随时会有发生意外发生,直接关系到吊装人员的性命安全。因此,为了确保吊件和吊装人员的生命安全,本文设计了基于DSPIC30微控制器[2]的光电传感器设计,该设计将有助于吊装过程中的精确监控和预防。
iGPS[3]是一种用于定位的测量系统,该系统采用了激光发射器[4],其作用是模拟卫星发射器。首先,激光发射器对空间进行扫描探测,然后探测结果被光电传感器接收,最后在通过相应的算法[5]处理即可得到物体的精准坐标,就目前的测量精度可达0.2 m。
1 无线传感器总体设计
1.1 无线光电传感器
如图1所示为无线光电传感器结构示意图,基于DSPIC30的光电传感器通过无线通讯技术将采集的信息发送给上位机[6]进行实时的处理。在该无线光电传感器模块中由传感器、信号处理电路、前端微型处理器和无线发射模块组成。信号处理电路的作用是将传感器检测到的微弱信号进行放大处理[7],然后再传送给微型处理器进行处理,在微型处理器处理后便可通过无线发射模块[8]将信息发射出去。
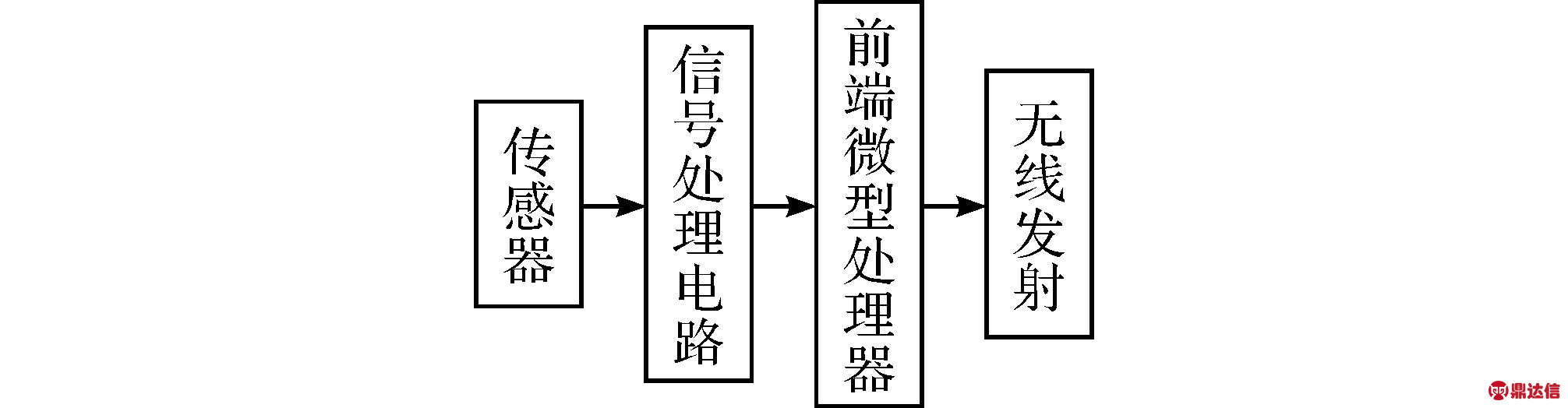
图1 无线光电传感器结构
1.2 传感器
为了能够有电流输出,本文选择可产生伏特效应的硅光电池。该电池具有大面积的PN结,在光照的作用下,电子会发生跃迁过程,跃迁产生的电子聚集在PN结的两端,从而产生电势差,将PN结两端接通之后,就会有电流的输出。在综合考虑传感器的一些特性后,本文选择PC50—6型硅光电池[8],该电池由德国Pacific Silicon Sensor 公司生产,噪声及频率特性均相对稳定,因此可作为本文传感器的选择。
1.3 微处理器
本文的微处理器采用DSPIC30,该微控制器为16位的高性能数字信号处理器,该芯片Flash空间容量大,因此在外围可以连接丰富的部件。该芯片能灵活处理外部中断,方便的实现与外围器件的结合。因为需要对接收到的传感器信号进行算法处理,DSPIC30则有84个基本指令,且为单周期的,因此算法效率较高。
2 光电传感器的硬件电路设计
由于硅光电池的输出信号比较微弱,一般情况均要加上前端电路进行合适的处理才能被微控制器所接收。通常前置电路有前置放大、差分减法、低通滤波以及末级放大等电路。如图2所示为前置放大电路,由于硅光电池输出的是电流信号,而微控制器能处理的是电压信号。因此,该模块能够将电流量转换为电压量进行处理,通常用公式U0=-RI[9]。
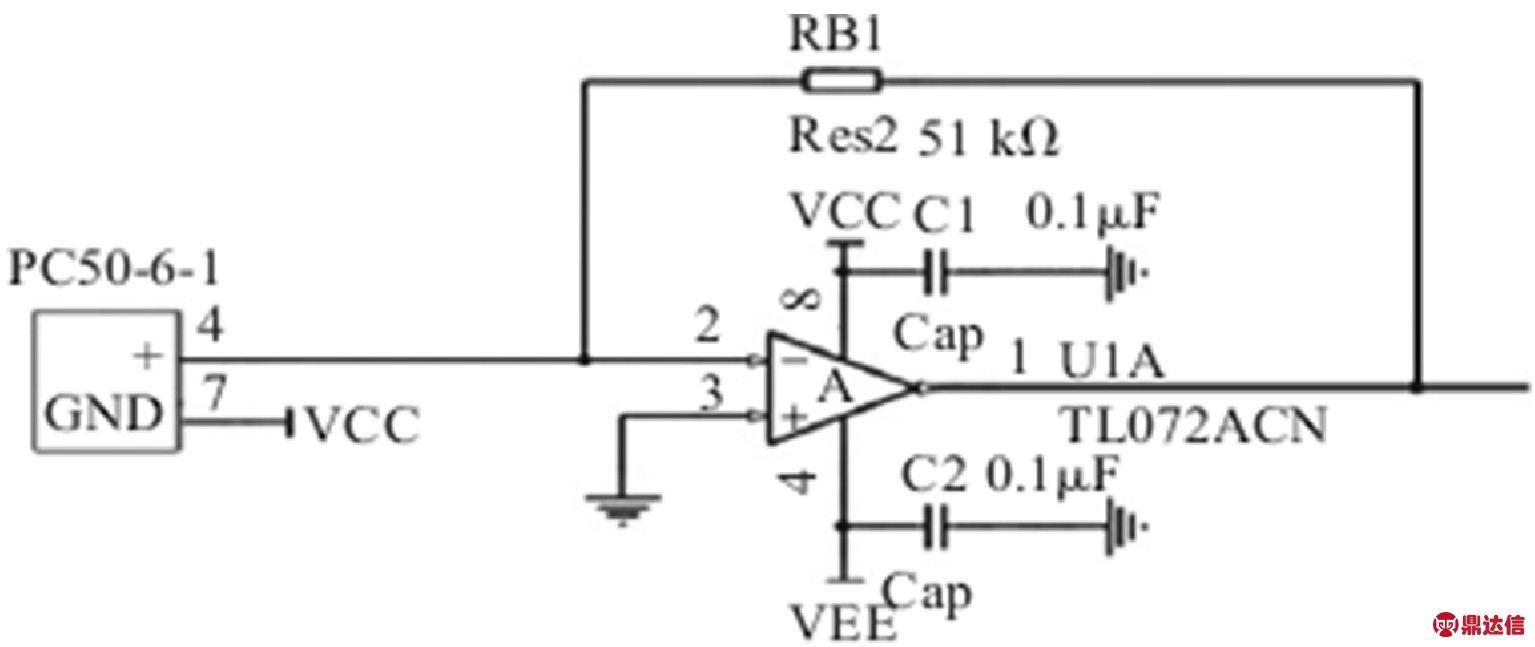
图2 前置放大电路
如图3所示,为差分补偿电路,对于硅光电池的输出信号有可能会被电磁场、外界温度变化以及周围环境所影响[10]。因此,在图3中选用两个硅光电池减少外界环境的影响。
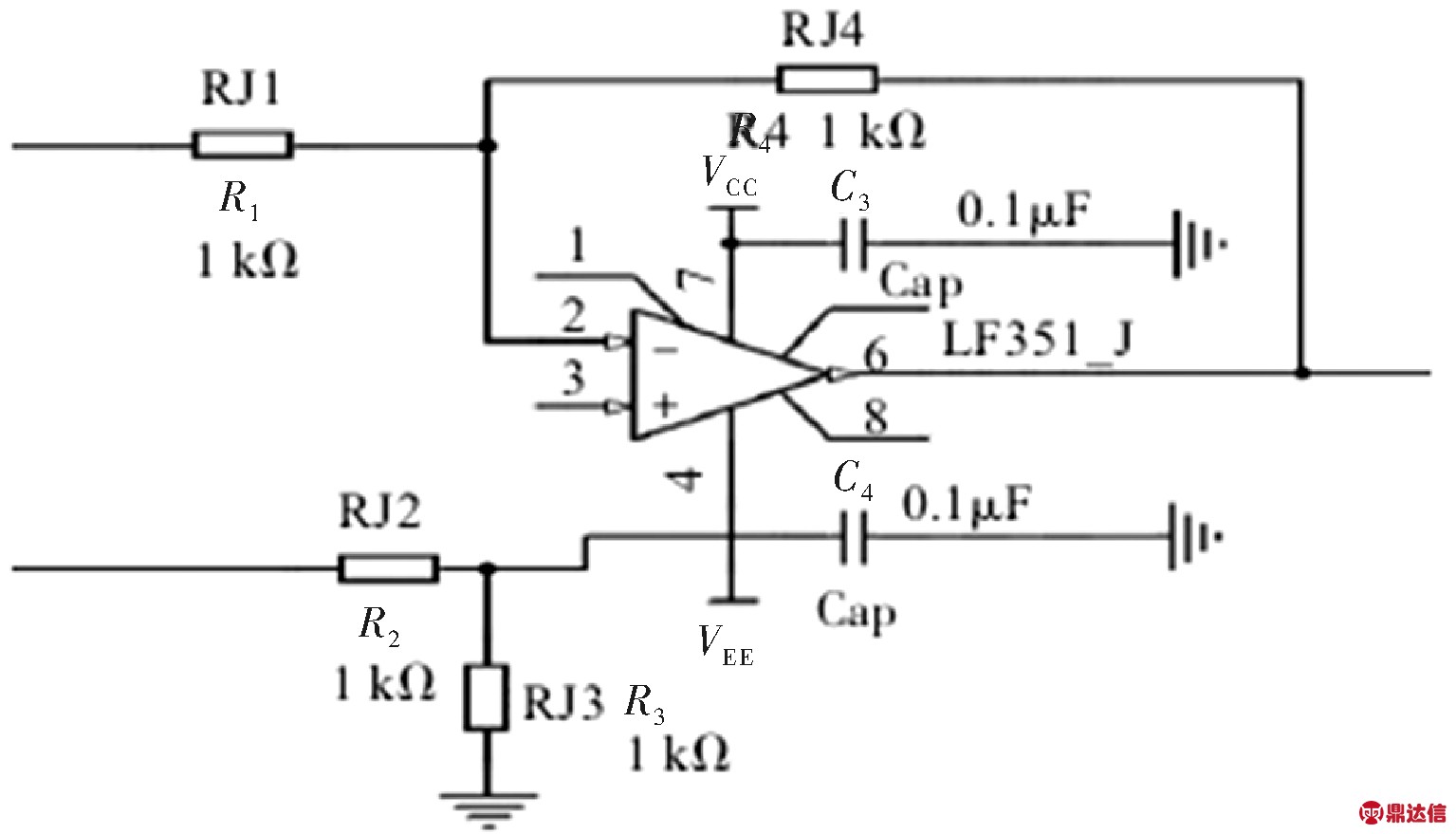
图3 差分补偿电路
图4为低通滤波器电路,该电路的作用是滤除差分补偿电路输出中的高频噪声信号[11],图4中所示为四阶的贝塞尔函数滤波器,在图中经过对有源电路设计手册进行查表可得:R1=0.55 kΩ,R2=2 kΩ,R3=R4=5.1 kΩ,R5=820 kΩ,R6=11 kΩ,R7为开路,电容值C1=C2=C3=0.001 μF,C4=0.000 1 μF。
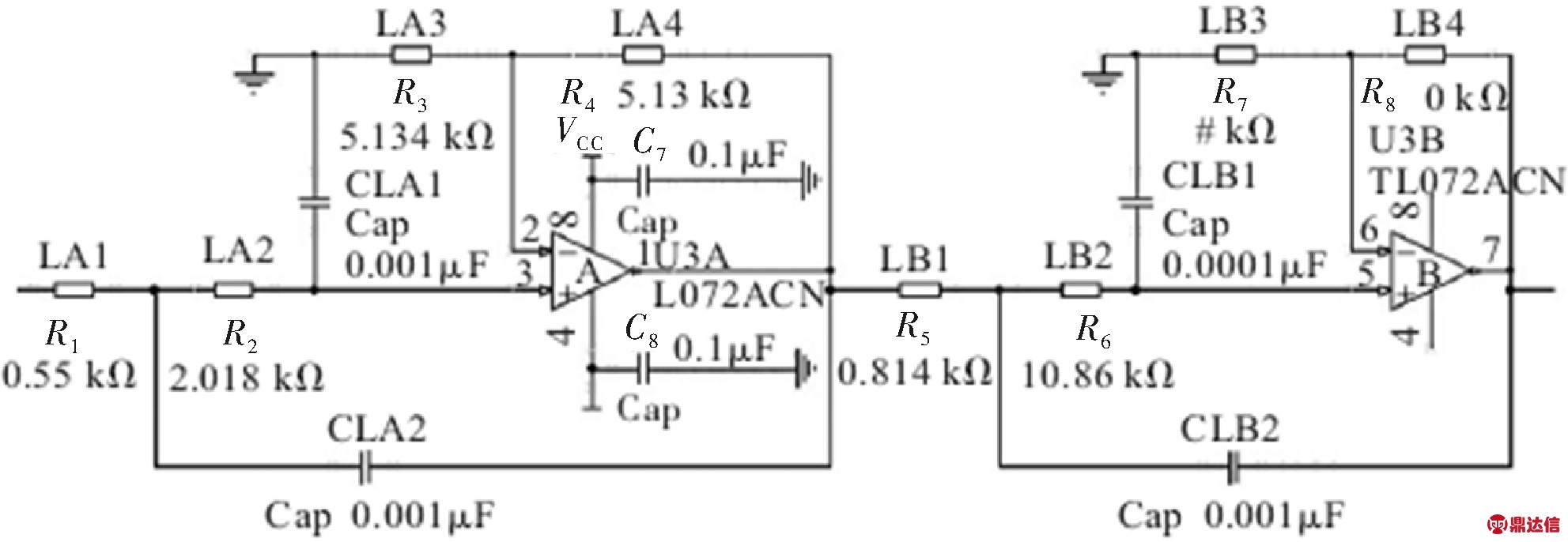
图4 低通滤波器
因DSPIC30的A/D采集参考电压为3.3 V,所以需要在末端配置相应的末级放大电路。图5为末级放大电路,信号在经过该末级放大电路后可放大3.3倍。
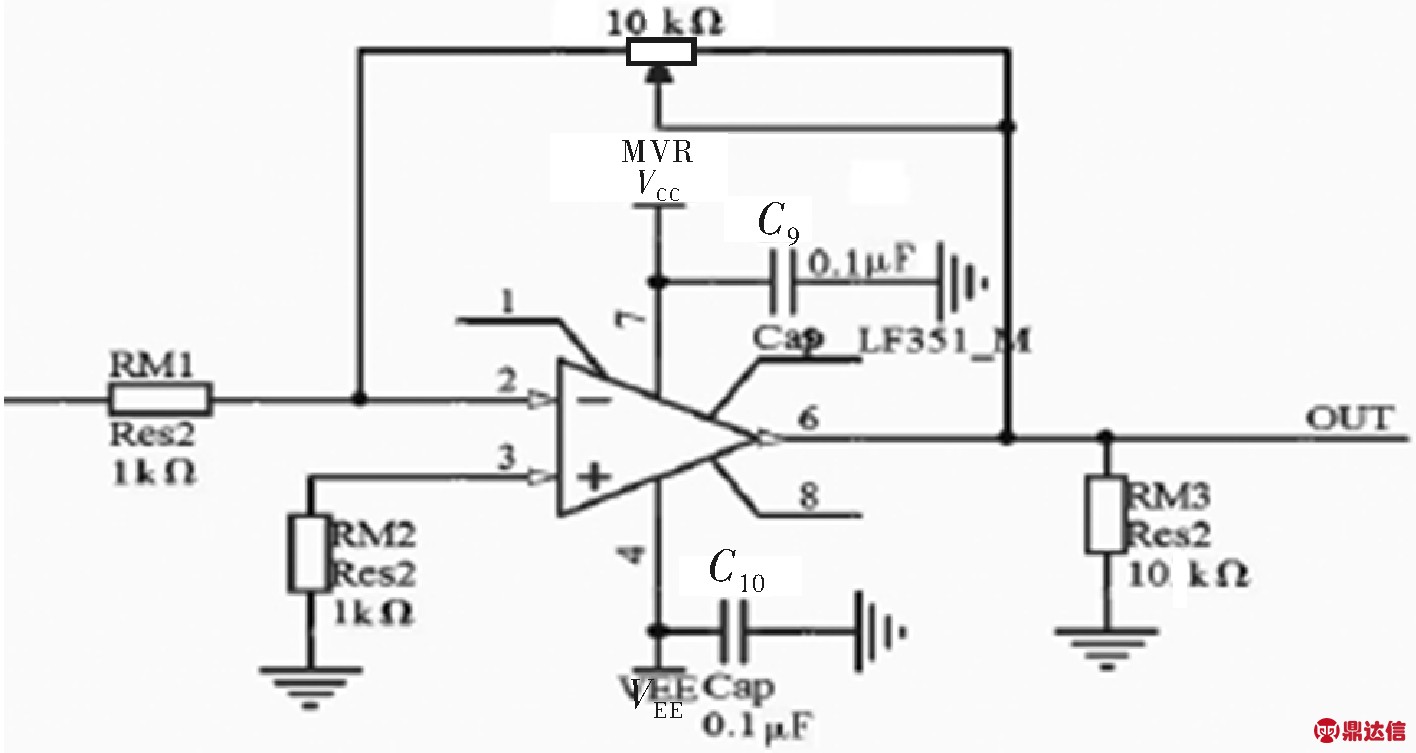
图5 末级放大电路
3 光电传感器的软件实现
3.1 AD 采集
如图6所示为 A/D 转换设置步骤流程图,由于DSPIC30内部具有10位A/D转换器[12],其ADC转换速率最高为1 MSample·s-1,故需要将A/D转换一次设置为1 μs。
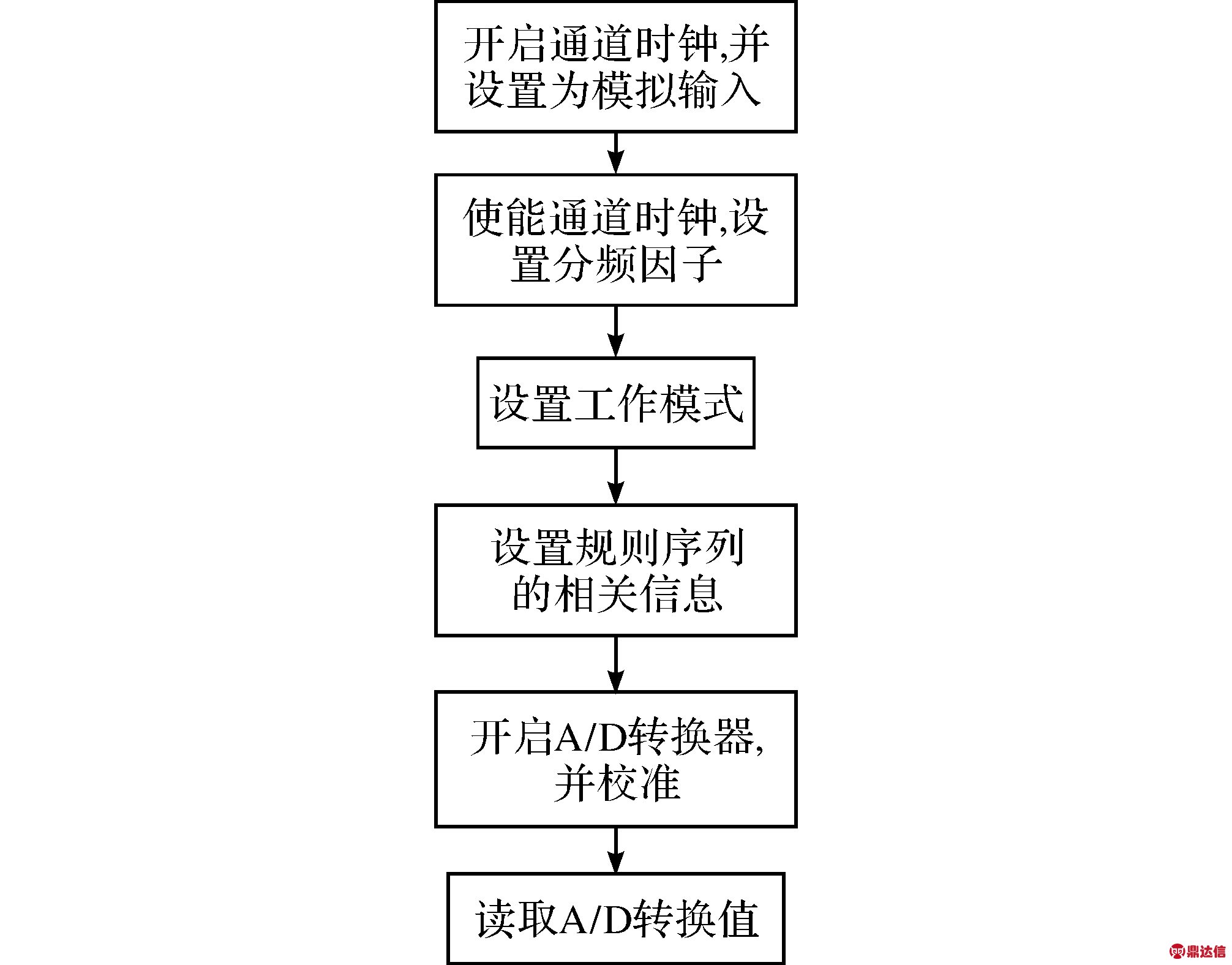
图6 A/D 转换设置步骤
3.2 MCU 软件
图7为主控芯片软件设置流程图,在对芯片进行上电完成后,首先进行初始化设置,初始化的设置包括发送端的地址数据、各个信道的频率设置以及发射次数等[13-15]。当初始化结束后,系统会进入如图7所示的主控流程进行循环运行,因此光电传感器信号就能顺利的进行发射。
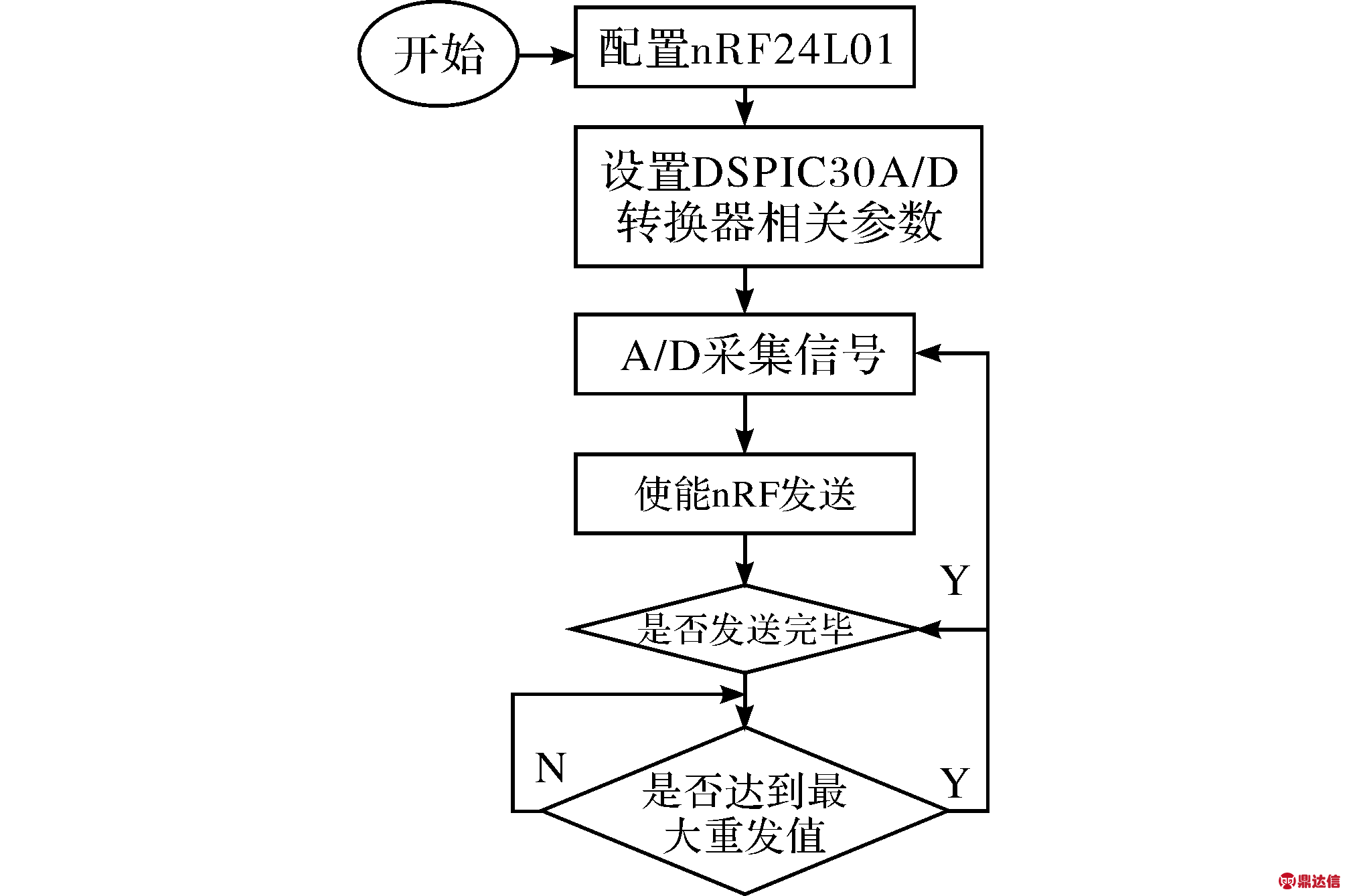
图7 主控芯片流程图
4 系统测试实验
为了验证本系统设计的正确性和实用性,选用了一个无线光传感器,然后用激光平面发射器对该传感器进行照射,将激光扫描频率设置为50 Hz。测试结果表明,AD 采集与无线发送数据速度能达到10 μs。在无障碍物作用下,光电传感器的信号可被传送到50 m的距离处,若加上天线,则光电传感器信号即可穿越障碍物,满足了对于大型吊装场合的需求和应用。如图8所示为测试距离与误差分析图,由该图中可知在距离为4 m时,测试误差达到最小,为0.25 mm。该实验验证了基于DSPIC30的光电传感器设计的实用性,其在未来的应用前景广阔。
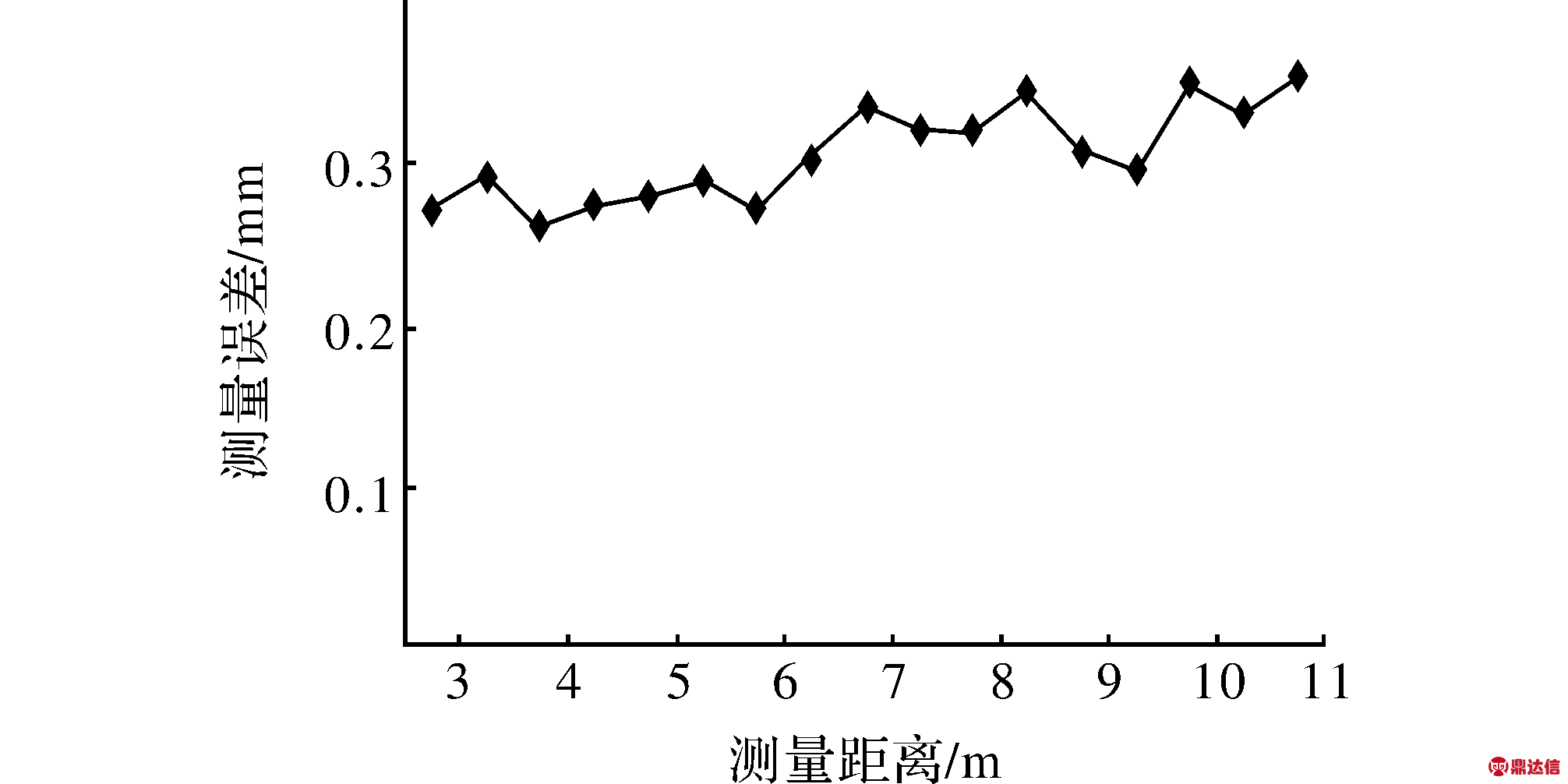
图8 测量距离与误差分析图
5 结束语
本文以大型吊装中操作不准确,环境变换以及错位吊装等会给吊装人员带来安全性问题出发,采用DSPIC30为主控制芯片,设计了光电传感器系统,该光电传感器系统的精确度可达0.2 mm,在未来大型构件吊装中具有重要作用。


