
摘要:光电轴角编码器也叫做光电角位置传感器,它集光、机、电为一体,它是以高精度圆光栅为检测元件,通过码盘把机械圆周角度转换为电信号,通过差分放大、整形滤波、校正、细分、译码等处理后和计算机相连可实现输出精密角度值以及做伺服控制,它具有分辨率高、测量范围广、使用可靠、易于维护等优点被广泛应用于雷达、光电经纬仪、数控机床、指挥仪和高精度闭环调速系统等诸多领域。随着科技的发展,军工、国防等领域对微型传感器的需求越来越急迫,要求编码器向高精度、高分辨率、小型化和智能化发展。同时随着科技的发展,尤其是空间科学自动化和国防建设等领域对编码器的分辨率和精度提出了更高的要求。因此,研制高精度、高分辨率的编码器是科学技术发展的关键一步。
关键词:光电编码器;经度;偏心
1 码盘装调偏心量对精度的影响
光电轴角编码器主轴的幌动和光栅码盘轴心与主轴系间的偏心都将引起测量误差,因此,采取措施尽量使码盘轴心与主轴轴心一致,是完成高精度编码器调试的必要条件。调整轴向跳动和偏心量是码盘装调主要步骤,启动摩擦力矩和高速旋转主轴转动惯量等也是码盘装调的主要程序。接下来只对码盘偏心量加以研究,并提出一种用光电信号调整码盘偏心量的方法,用光电信号调整码盘偏心的成功应用为高精度编码器码盘的调试成型奠定了基础。
码盘偏心量是指码盘轴心与支承主轴旋转中心的差值。该差值量直接影响精粗码道之间的相位关系,同时该偏心量对读数也有显著影响,如图1所示:
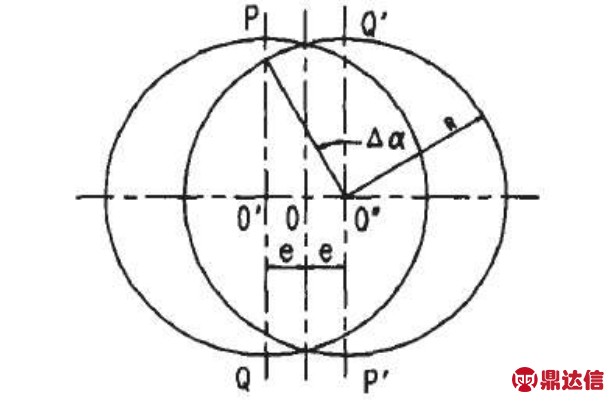
图1 码盘偏心量
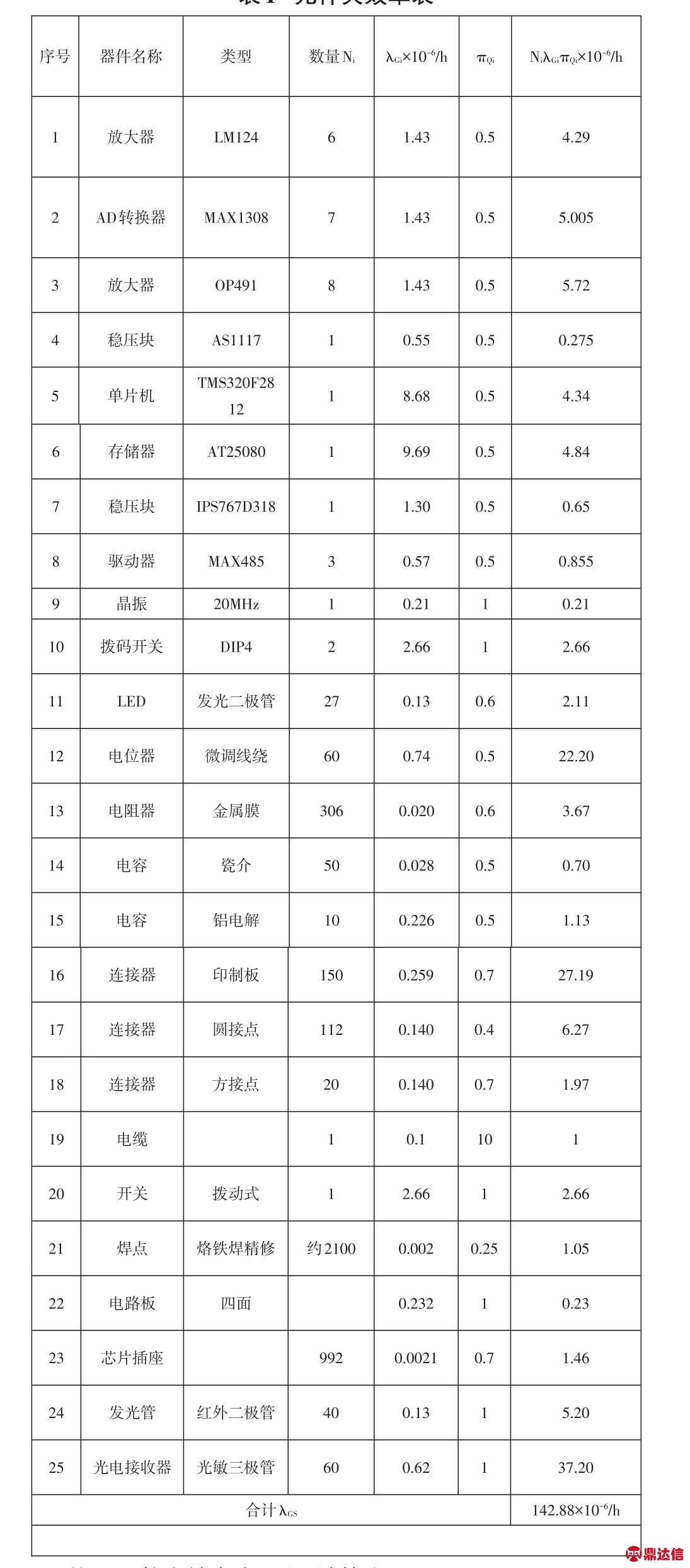
图2 显微镜调码盘偏心
其读数误差Δα可由下式计算:
其中,R—码盘外圆刻画半径;e—偏心量;通常偏心量e不会太大,但对于刻线密度较大的码盘来说,光栅码盘轴心与主轴系间的偏心造成的误差较大,若接收装置的位置和偏心量平行,就会出现相差一个区的误差,若接收装置和偏向量垂直,刻线就沿偏心方向变化,变化量和偏心量一致,编码器主轴晃动造成的影响与码盘安装偏心相似,因此也归并到偏心误差中。为了消除码盘偏心量对读数的影响,我们通常在设计时采用对径双边读数,即在对径方向上分别装有两个狭缝I1和I2,若有第一个狭缝I1读数为φ1,第二个狭缝I2读数为φ2,那么轴的转角为两读数和的一半即:![]()
若因偏心而引起读书不准确而产生一个读数差Δφ,则
以上两式即偏心对读数的影响。狭缝I1和I2大小相等,方向相反。这样轴的实际转角为:
(3)式与(2)式结果相同,因此采用对经读数方式,不管码盘偏心量如何,不影响读数。因此,偏心不限制对径读数。但是光栅码盘轴心与主轴系间的偏心对粗码计圈数间的关系影响无法消除,不能补偿圈间关系,因为狭缝本身的圈间关系是一个定值,不随码盘的圈间相位变化容易导致错码。在高精度的编码器中在对径方向放置两个接收装置,但电路会增加,由此尽量通过精确装调减小安装偏心来消除误差。
采用光电信号调偏心既解决了传统采用显微镜调偏心方法的局限性,又提高了偏心调整的准确性,同时减少了工作量,解决了实际工作中许多特定条件下无法安装显微镜进行装调的局限。
传统的显微镜调偏心方法首先用单个显微镜进行粗调,之后在对径180度放两个显微镜进行精调。把显微镜A作为调整基准,A瞄准光栅码盘上的任一条线b,如图2所示;同时用显微镜B用来测量大小,B瞄准对径另一条线a。这时记下显微镜B的读数h1,之后旋转码盘180°,让显微镜A瞄准线条a,再读取显微镜B的数值h2,那么偏心量为 ∣h1-h2∣。根据显微镜B的读数与方向,通过显微镜B观察,往显微镜A,B的垂直方向调整码盘,大小为∣h1-h2∣,通过多次调整,使 O'和 O重合,调整后,将码盘转过90°,再重复同上调整。经过这两个互相垂直方向偏心的调整后,偏心还存在,其实最大偏心不一定在这两个方向上,然而为了更准确调整偏心,还应该在更多的角度上进行调试。同时,用这种方法在实际应用中我们很难在显微镜视野范围内准确地找到两条对径放置的线条,偶尔错码道调试,没有实现将码盘偏心调致最佳,从而影响编码器读数。
由此我们不难发现这种调试偏心方法有很多缺陷。接下来介绍的电信号调偏心方法解决了以上问题。
在编码器精码对径位置上放置两个接收管,通过电信号读出两个最外圈精码信号。先看其中一的信号输出情况,因为有偏心存在,我们在示波器显示的图像中会发现其信号幅值时大时小,上下串动。我们标记其幅值的最大值Hmax和最小值Hmin,在对径Hmax与Hmin方向上进行调整。调整量Δh=(Hmax-Hmin)/2。经过多次调整,使信号幅值基本不变。在传统调试中这一步就是单镜粗调过程。完成上述过程后,接下来我们进行精调,在对径放置的另一个接收管读取最外圈精码信号,用示波器X-Y档观察两者的差动,码盘旋转起来时会发现信号长短变化,如图4所示。
这一变化所反映的相位变化量为偏心量的2倍即2e,这时把码盘沿两接收管连线的垂直方向上调整,调整量为两个极值点变化量的一半。在调试过程中会出现差动图像翻转的现象,这时可耐心观测其翻转变化规律。当偏心量是精码周期四分之一时,差动图就翻转一个圆;当偏心量是精码周期二分之一时,差动图就翻转二个圆;当偏心量是精码周期四分之三时,差动图就翻转三个圆;当偏心量为精码周期时,差动图就翻转四个圆;当差动图翻转好几个圆时,这个时候通过示波器观察两个极值变换点,也就是同相相位往反相相位变化时候或者反相相位往同相相位变化时,这两个个时刻就是极值点此时把码盘沿两接收管连线的垂直方向码盘方向调整,调整量为变化量的一半。如果差动图形翻转8个圆,此时偏心量为精码二个整周期,这时观察示波器显示的差动图像敲回4个圆,依此类推调整到差动图相位关系不变为止。此时偏心已经调成。此过程这相当于传统的双镜调偏心过程。
这个方法改变了传统的用两台显微镜在对径180度敲偏心方法,提高了偏心调试的准确性,也节省了时间同时又降低了劳动强度。该方法能准确、快速完成光电轴角编码器码盘调试,既节省了时间同时提高调试精度。目前该方法在编码器码盘偏心调试中已得到广泛应用,也提高了工作效率。也解决了传统显微镜调试码盘时出现特定情况无法安装显微镜的难题。因此光电信号调试码盘偏心的方法既提高了编码器的精度也提高了调试当中环境适应性。
2 电路设计对精度影响
编码器系统电路包括:光电信号整理电路、A/D模数转换电路、FPGA数据处理电路、接口电路、控制软件、电源等。
1)光电编码器粗码光电信号采集系统由发光装置、光电接收装置、差分放大器等组成。光源发出的红外光线经过狭缝,由主轴带动旋转的码盘,经过码盘上的码道也就是明暗相间的条纹后照射到光电接收装置上,接收管会形成有规律的电信号。光电接收装置由二极管,三极管组成,有5V偏压供电当光敏二极管接收到红外光线照射会产生微弱的光电流由三极管放大并由发射极输出,通过采样电阻采集信号将光电流转变成较好的模拟电压信号,这时候经过I/V转换变成的微弱电压信号,不能够满足后续电路处理的需要,必须对微弱的原始电压信号进行放大,然后经过比较器使其输出方波信号,送入中央处理芯片进行粗码查表译码。此过程是将物理量机械角度信息转化为二进制数字代码的中间媒介,是完成物理,光,电信号转换的关键。同样也是高质量莫尔条纹信号形成的重要组成部分。为接下来的细分,精码信号处理打下基础。
2)光电编码器精码光电信号采集系统也由发光装置、光电接收装置、差分放大器等组成。与粗码光电信号采集系统不同的是,精码狭缝盘有四个窗口,呈田字形排列,接收管接收到的是四路相位相差90度的莫尔条纹信号。也就是有规律的正弦波。由于码盘精码码道一周要刻上千对亮暗相间的条纹导致光栅线节距较小,光电接收管同粗码光电信号采集系统一样会产生微弱的光电流,并由光电接收装置中的三极管发射极输出,同时信号中有较大的直流电平分量和高次谐波分量,必须很好地处理这些杂质才能提高编码器的精度,采用对精码信号进行差分放大的方法处理这些信号,一是可以消除直流电平分量,二是滤去信号中的偶次谐波分量,从而得到高质量的莫尔条纹信号。将三极管发射极输出的四路信号中的0度与180度两路莫尔条纹信号通过电位计采集信号将光电流转变成较好的模拟电压信号,同理也对90度和270度这样处理然后送入差分放大器进行差分放大。这样我们就会得到两路高质量的信号。同理四路校正码道光电信号也要进行同样的采集与处理。然后将这些高质量的信号进一步输入到以FPGA为核心的信号处理电路;FPGA在工作时主要实现A/D转换时序控制、对粗码查表并译码、精码细分、精粗码间的校正及数据并行输出。系统总体结构框图如下图3。
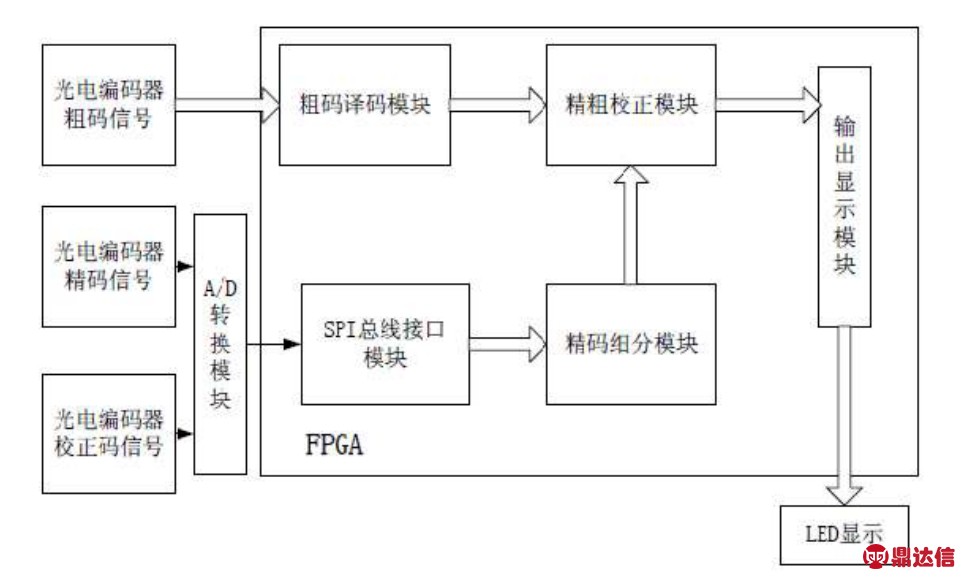
图3 信号处理电路
电路部分影响测量精度的主要因素有细分误差和量化误差。细分误差又由直流分量误差、幅值误差和正交相位误差组成。
1)直流分量误差:
式中:
a、b—两路细分信号的直流分量的偏移量;r—信号幅值;
39.5″—精码最高位周期。
设r=1、a=b=0.02(2%r),则Δdmax=0.177″。
2)幅值误差:
式中:
r—信号幅值;
dr—两路细分信号的幅值的偏差。
设r=1、dr=0.05(5%r),则Δamax=0.16″。
3)正交相位误差:
式中:
dθ—相位差。
设dθ=2,则Δθmax=0.21″。
直流分量误差、幅值误差和正交相位误差是影响细分误差的三个主要因素,合成后得到细分误差的标准偏差为:
编码器角度数据由二进制数码序列表示,对于连续变化的角度位移在介于两个数码之间的值只能用与它相近的数码表示,这样便产生了量化误差。量化误差具有随机性,属均匀分布。
4)量化误差:
式中:
q—编码器分辨力0.077″。
电路系统误差合成:![]()
编码器工作可靠性决定了测量数据的有效性。数据是否有效也是影响精度因素之一。依据国军标GJB/Z 299B-98有关规定,设电子产品的寿命一般服从指数分布同时所有部件满足失效定律,其模型为串联结构。则基本可靠性:
MTBF=1/λGS
设备总的失效率:
式中:
λGi表示第i种电子器件的通用失效率,10-6/h;
πQi表示第i种电子器件的通用质量系数;
Ni表示第i种电子器件的数量;
N表示设备所用电子器件种类。
绝大多数元器件质量等级符合SJ331的Ⅱ类产品,或高于此标准。设备应用环境属于一般地面固定(代号GF1)。依据国军标GJB/Z 299B-98《电子设备可靠性预计手册》5.1、5.2及5.2通用失效率表查得参数填入表1。
表1 元件失效率表
按照元件失效率表,可以计算出:
λGS=142.88×10-6/h
MTBF=6998.8h>3000h
结论可靠性分析结果满足技术指标要求。


